JP2005295302A - カメラ画像処理装置 - Google Patents
カメラ画像処理装置 Download PDFInfo
- Publication number
- JP2005295302A JP2005295302A JP2004108944A JP2004108944A JP2005295302A JP 2005295302 A JP2005295302 A JP 2005295302A JP 2004108944 A JP2004108944 A JP 2004108944A JP 2004108944 A JP2004108944 A JP 2004108944A JP 2005295302 A JP2005295302 A JP 2005295302A
- Authority
- JP
- Japan
- Prior art keywords
- image
- feature
- feature pixel
- image data
- pixel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Image Processing (AREA)
- Studio Devices (AREA)
Abstract
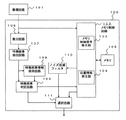
【解決手段】 撮像回路101から出力される画像データはカメラ画像処理装置100に入力され、メモリ制御回路102を介してメモリ105に記憶される。また、微分回路106によりエッジ強度が出力され、特徴画素抽出回路107によりエッジ強度が極大になる画素の情報が出力される。この特徴画素の情報は特徴画素情報保持回路108に1フレーム前の特徴画素の情報として保存される。特徴画素抽出回路107の出力と特徴画素情報保持回路108の出力が特徴画素判定回路109にて処理され、同じ特徴点を表すか否かが判定される。同じ特徴点の場合、1フレーム前後の画像データの位置が補正され、ノイズ低減フィルタ110にてノイズ低減がなされる。
【選択図】 図1
Description
図1はこの発明の実施の形態1であるカメラ画像処理装置の構成を示すブロック図である。同図において、カメラ画像処理装置100は、撮像回路101からフレーム単位で順次入力される画像データのエッジ情報を用いてフレーム間で発生する位置ずれを補正しフィルタ処理を行うものであり、入力される画像データを順次記憶するメモリ105と、メモリ制御信号発生部103および位置情報生成部104からなりメモリ105への書き込みおよび読み出し動作を制御するメモリ制御回路102と、入力される画像データの微分値を算出する微分回路106と、微分回路106の結果からフレーム内での特徴あるエッジ情報をもつ画素を決定する特徴画素抽出回路107と、特徴画素抽出回路107での結果を保持する特徴画素情報保持回路108と、特徴画素抽出回路107の出力と特徴画素情報保持回路108で保持している前フレーム画像データに対する情報から、連続する2つのフレームのそれぞれの特徴画素が同じ特徴点を表すものであるかどうかを判定して現フレームに対してフィルタ処理を行うか否かを決定する特徴画素判定回路109と、複数フレームの画像データを用いてフィルタ処理を行うノイズ低減フィルタ110と、特徴画素判定回路109の結果から現フレームの画像データとノイズ低減フィルタ110の画像データ出力とを選択する選択回路111とから構成されている。
図3はこの発明装置の実施の形態2の構成を示すブロック図である。このカメラ画像処理装置200において、図1に示したカメラ画像処理装置100と同様の部分については同一の符号を付しており、特徴画素抽出回路107と特徴画素判定回路109の間に、特徴画素フィルタ201を設けている点が異なる。特徴画素フィルタ201は、特徴画素抽出回路107において複数の特徴画素を抽出した場合に、設定された特定の条件に従って後段回路に出力する特徴画素数を制限するものである。以下にカメラ画像処理装置200の具体的な動作について説明する。
図4はこの発明装置の実施の形態3の構成を示すブロック図である。このカメラ画像処理装置300において、図1に示したカメラ画像処理装置100と同様の部分については同一の符号を付しており、メモリ制御回路102の位置情報生成部104の代わりに、エッジ強調処理用位置情報生成部301を用いている点が異なる。以下にカメラ画像処理装置300の具体的な動作について説明する。
107 特徴画素抽出回路、108 特徴画素情報保持回路、109 特徴画素判定回路、110 ノイズ低減フィルタ、111 選択回路。
Claims (3)
- カメラ撮影により得られたディジタル画像データを画像処理するカメラ画像処理装置において、
少なくとも入力される第1の画像データおよび第2の画像データを記憶する記憶手段と、
前記各画像データに対して微分演算を行う微分手段と、
前記微分手段の出力から前記各画像のエッジの強度および向きを算出し、エッジの強度が極大の画素を特徴画素として抽出する特徴画素抽出手段と、
前記第1の画像に対応する第1の特徴画素情報を、少なくとも前記特徴画素抽出手段での前記第2の画像に対応する第2の特徴画素情報の検出処理が終了するまで保持する特徴画素情報保持手段と、
第1の特徴画素情報と第2の特徴画素情報とが示す特徴画素が同じ画像に関わる特徴画素を表すかどうかを判定し、これらの特徴画素位置情報を出力する特徴画素判定手段と、
前記各画像の前記記憶手段への書き込み及び読み出しを制御する記憶制御手段と、
前記特徴画素位置情報に基づき、前記第1の画像位置に対する前記第2の画像位置のずれ量を算出する位置情報生成手段と、
前記記憶手段から読み出された前記第1の画像データに前記第2の画像データを前記位置ずれ量を補正して重ね合わせ、平均化演算処理によりノイズ低減画像データを得るノイズ低減処理手段とを供えたことを特徴とするカメラ画像処理装置。 - 前記特徴画素抽出手段から出力される特徴画素数を所定の条件に従って制限する特徴画素情報制限手段をさらに備えたことを特徴とする請求項1に記載のカメラ画像処理装置。
- 前記位置情報生成手段において算出された前記第1の画像位置に対する前記第2の画像位置のずれ量に、その位置ずれ量により設定される画素数分の位置ずれを付加したことを特徴とする請求項1に記載のカメラ画像処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004108944A JP2005295302A (ja) | 2004-04-01 | 2004-04-01 | カメラ画像処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004108944A JP2005295302A (ja) | 2004-04-01 | 2004-04-01 | カメラ画像処理装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005295302A true JP2005295302A (ja) | 2005-10-20 |
Family
ID=35327732
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004108944A Pending JP2005295302A (ja) | 2004-04-01 | 2004-04-01 | カメラ画像処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005295302A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007281546A (ja) * | 2006-04-03 | 2007-10-25 | Samsung Techwin Co Ltd | 撮像装置,及び撮像方法 |
| KR100810154B1 (ko) | 2006-06-28 | 2008-03-06 | 엠텍비젼 주식회사 | 이미지의 노이즈 제거 장치 및 제거 방법 |
| KR100866963B1 (ko) | 2007-03-12 | 2008-11-05 | 삼성전자주식회사 | 수평 방향의 기울어짐 왜곡과 수직 방향의 스케일링 왜곡을보정할 수 있는 디지털 영상 안정화 방법 |
| KR100888428B1 (ko) | 2007-02-08 | 2009-03-11 | 엠텍비젼 주식회사 | 영상의 노이즈 제거 장치 및 방법 |
| US7773825B2 (en) | 2005-11-02 | 2010-08-10 | Nec Electronics Corporation | Image stabilization apparatus, method thereof, and program product thereof |
| JP2012514419A (ja) * | 2008-12-30 | 2012-06-21 | インテル・コーポレーション | ビデオに含まれるノイズを低減する方法および装置 |
-
2004
- 2004-04-01 JP JP2004108944A patent/JP2005295302A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7773825B2 (en) | 2005-11-02 | 2010-08-10 | Nec Electronics Corporation | Image stabilization apparatus, method thereof, and program product thereof |
| JP2007281546A (ja) * | 2006-04-03 | 2007-10-25 | Samsung Techwin Co Ltd | 撮像装置,及び撮像方法 |
| US7856174B2 (en) | 2006-04-03 | 2010-12-21 | Samsung Electronics Co., Ltd. | Apparatus and method for image pickup |
| KR100810154B1 (ko) | 2006-06-28 | 2008-03-06 | 엠텍비젼 주식회사 | 이미지의 노이즈 제거 장치 및 제거 방법 |
| KR100888428B1 (ko) | 2007-02-08 | 2009-03-11 | 엠텍비젼 주식회사 | 영상의 노이즈 제거 장치 및 방법 |
| KR100866963B1 (ko) | 2007-03-12 | 2008-11-05 | 삼성전자주식회사 | 수평 방향의 기울어짐 왜곡과 수직 방향의 스케일링 왜곡을보정할 수 있는 디지털 영상 안정화 방법 |
| JP2012514419A (ja) * | 2008-12-30 | 2012-06-21 | インテル・コーポレーション | ビデオに含まれるノイズを低減する方法および装置 |
| US8903191B2 (en) | 2008-12-30 | 2014-12-02 | Intel Corporation | Method and apparatus for noise reduction in video |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4487191B2 (ja) | 画像処理装置および画像処理プログラム | |
| US10636126B2 (en) | Image processing device, imaging apparatus, image processing method, image processing program, and recording medium | |
| JP4645746B2 (ja) | 画像処理装置、画像処理方法および撮像装置 | |
| US20120287295A1 (en) | Image pickup apparatus that performs image pickup using rolling shutter method, method of controlling the same, and storage medium | |
| JP5569357B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| JP2010166558A (ja) | 撮像装置 | |
| JP2010211255A (ja) | 撮像装置、画像処理方法及びプログラム | |
| JP6039188B2 (ja) | 画像処理装置および画像処理方法 | |
| JP5976315B2 (ja) | 撮像装置 | |
| JP4985124B2 (ja) | 画像処理装置、画像処理方法、及び画像処理プログラム | |
| JP2017049947A (ja) | 画像処理装置および画像処理方法 | |
| JP6541501B2 (ja) | 画像処理装置、撮像装置、及び画像処理方法 | |
| JP2005295302A (ja) | カメラ画像処理装置 | |
| JP2008099260A (ja) | 画像処理装置、電子カメラ、および画像処理プログラム | |
| JP4418342B2 (ja) | 画像処理装置及び電子カメラ | |
| CN110913143B (zh) | 图像处理方法、装置、存储介质及电子设备 | |
| JP2009049575A (ja) | 画像処理装置及び画像処理方法及びプログラム | |
| JPH1117984A (ja) | 画像処理装置 | |
| JP5760654B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP2010056817A (ja) | 撮像装置 | |
| JP2006325274A (ja) | 撮像装置 | |
| JP2008235958A (ja) | 撮像装置 | |
| JP2018098612A (ja) | 画像処理装置及び画像処理方法、撮像装置、プログラム、記憶媒体 | |
| JP2016099836A (ja) | 撮像装置、画像処理装置、画像処理方法、及びプログラム | |
| JP5855485B2 (ja) | 画像生成装置、画像生成方法、撮像装置、および撮像方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090515 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090915 |