JP2005295966A - Transplanter - Google Patents
Transplanter Download PDFInfo
- Publication number
- JP2005295966A JP2005295966A JP2004121188A JP2004121188A JP2005295966A JP 2005295966 A JP2005295966 A JP 2005295966A JP 2004121188 A JP2004121188 A JP 2004121188A JP 2004121188 A JP2004121188 A JP 2004121188A JP 2005295966 A JP2005295966 A JP 2005295966A
- Authority
- JP
- Japan
- Prior art keywords
- seedling
- seedling planting
- planting
- claw
- seedlings
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 210000000078 claw Anatomy 0.000 claims description 104
- 230000007246 mechanism Effects 0.000 claims description 22
- 238000002054 transplantation Methods 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 7
- 238000001125 extrusion Methods 0.000 description 6
- 239000002689 soil Substances 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
- 241000234282 Allium Species 0.000 description 2
- 235000002732 Allium cepa var. cepa Nutrition 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 244000151012 Allium neapolitanum Species 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images















Landscapes
- Transplanting Machines (AREA)
Abstract
Description
本発明は、苗トレイから苗植付爪によって取出した1株分の玉ネギ、葉ネギ、白ネギなどの苗をそのまま直接的に圃場に植え付けるようにした移植機に関する。 The present invention relates to a transplanter in which seedlings such as onions, leaf onions, and white onions taken out from a seedling tray by seedling planting nails are directly planted in a field.
従来から、移植機の機体後部に横送りネジ軸を左右方向に横設し、該横送りネジ軸に摺動自在に苗載台を配し、該苗載台上に苗を収納した苗トレイを載置し、横送り駆動によって苗載台を左右に往復移動させ、左右の終端位置に至ると苗トレイの縦送り駆動が行われるようにし、苗植付爪によって苗トレイ上から苗を取出し、そのまま直接的に圃場に植え付けるようにした移植機がある(例えば、特許文献1参照。)。 2. Description of the Related Art Conventionally, a seedling tray in which a transverse feed screw shaft is installed in the left-right direction at the rear of the body of the transplanter, a seedling stage is slidably disposed on the lateral feed screw axis, and seedlings are stored on the seedling stage. The seedling stage is reciprocated to the left and right by lateral feed drive, and when the left and right end positions are reached, the seedling tray is driven to feed vertically, and the seedling is taken out from the seedling tray by the seedling planting claws. There is a transplanter that is directly planted in a field (see, for example, Patent Document 1).
しかし、上述のような移植機では、1つの苗トレイに対して1つの苗植付爪により苗の取出しと植付けの一連の移植作業を行うようにしているため、同時に苗を植付けることができる条数が少なく、多量の苗を移植する場合には、何度も歩きながら往復して移植作業を行う必要があった。 However, in the transplanting machine as described above, since a series of transplanting operations of taking out and planting seedlings is performed with one seedling planting claw on one seedling tray, seedlings can be planted at the same time. When transplanting a large number of seedlings with a small number of streaks, it was necessary to reciprocate while walking many times.
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。 The problems to be solved by the present invention are as described above. Next, means for solving the problems will be described.
即ち、請求項1においては、苗載台上に載置した苗トレイに収納したセル成形苗を取出して圃場に植付ける苗植付爪と、進行方向に対して苗植付爪の前方に配置した苗載台とを備えた乗用形移植機であって、苗植付爪の支点部を略3角形状の軌跡Kで移動させ、苗載台より後方にセル成形苗を取出し下方に搬送して圃場に植付けるように構成したものである。 That is, according to claim 1, a cell-molded seedling stored in a seedling tray placed on a seedling stand is taken out and planted in a field, and placed in front of the seedling planting nail with respect to the traveling direction. This is a riding-type transplanter equipped with a seedling mounting table that moves the fulcrum of the seedling planting claw with a substantially triangular locus K, takes out the cell-shaped seedling behind the seedling mounting table, and transports it downward. It is configured to be planted in the field.
請求項2においては、前記苗植付爪を左右に並設し、1つの苗トレイより2組の苗植付爪でセル成形苗を取出して隣接する2条ずつに植付けるようにしたものである。
In
請求項3においては、前記苗植付爪の駆動機構を左右外側に配置したことをものである。 According to a third aspect of the present invention, the drive mechanism for the seedling planting nail is arranged on the left and right outer sides.
請求項4においては、前記苗トレイを苗載台上に複数設けた場合には、内側で隣接する左右の苗植付爪の駆動機構を共用にしたものである。 In Claim 4, when the said seedling tray is provided with two or more on a seedling mounting stand, the drive mechanism of the right and left seedling planting nail which adjoins inside is shared.
本発明の効果として、以下に示すような効果を奏する。 As effects of the present invention, the following effects can be obtained.
請求項1においては、苗載台上に載置した苗トレイに収納したセル成形苗を取出して圃場に植付ける苗植付爪と、進行方向に対して苗植付爪の前方に配置した苗載台とを備えた乗用形移植機であって、苗植付爪の支点部を略3角形状の軌跡Kで移動させると共に、支点部を中心として苗植付爪を首振りさせて苗植付爪先端を苗植付軌跡Aで移動させ、苗載台より後方にセル成形苗を取出し下方に搬送して圃場に植付けるように構成したものであるから、苗トレイから取出した苗の直接植付けを容易に可能とさせると共に、苗トレイの取出し苗より上方の苗に悪影響を与えることなく良好に苗を取出してスムーズな直接植付けを容易に可能とさせて作業性の信頼性を向上させることができる。 In Claim 1, the seedling planting nail which takes out the cell-molded seedling stored in the seedling tray placed on the seedling placing stand and is planted in the field, and the seedling placed in front of the seedling planting nail with respect to the traveling direction This is a riding type transplanter equipped with a mounting stage, and the fulcrum part of the seedling planting claw is moved along a locus K having a substantially triangular shape, and the seedling planting claw is swung around the fulcrum part. Since the tip of the claw is moved along the seedling planting locus A, the cell-molded seedling is taken out rearward from the seedling mounting stage, transported downward, and planted in the field. To make planting easy and to improve the workability reliability by easily taking out seedlings without adversely affecting the seedlings above the seedlings taken out of the seedling tray and enabling smooth direct planting. Can do.
請求項2においては、前記苗植付爪を左右に並設し、1つの苗トレイより2組の苗植付爪で苗を取出して隣接する2条ずつに植付けるようにしたものであるから、2条同時の苗植付けを可能とさせて、作業効率を向上させることができる。
In
請求項3においては、前記苗植付爪の駆動機構を外側に配置したものであるから、2つの苗植付爪を近接して配置して、条間が狭い場合でも2条同時の苗植付けを可能とさせて、作業効率を向上させることができる。また、駆動機構によりその内側に配置した苗植付爪を保護することができる。
In
請求項4においては、前記苗トレイを苗載台上に複数設けた場合には、内側で隣接する左右の苗植付爪の駆動機構を共用にしたものであるから、駆動機構の数を減少させて、コストの削減させることができ、コンパクトに構成できる。 In claim 4, when a plurality of the seedling trays are provided on the seedling mount, the drive mechanisms of the right and left seedling planting claws adjacent on the inside are shared, so the number of drive mechanisms is reduced. Thus, the cost can be reduced, and a compact configuration can be achieved.
次に、発明の実施の形態を説明する。
図1は本発明の一実施例に係る移植機の全体的な構成を示した側面図、図2は植付部の側面図、図3は苗植付爪部の側面図、図4は苗植付爪部の後面図、図5は苗植付ユニットの駆動説明図、図6は苗植付爪の駆動説明図、図7はロータリケースの断面図、図8は揺動カム部の説明図、図9は溝カム部の説明図、図10は植付爪部の平面説明図、図11は苗押出部材の説明図、図12は苗植付爪の軌跡の説明図、図13はロータリケースの側面説明図、図14は苗植付爪の側面説明図、図15は苗植付爪の0°、180°位置の説明図、図16は苗植付爪の45°、225°位置の説明図、図17は苗植付爪の90°、270°位置の説明図、図18は苗植付爪の135°、315°位置の説明図である。
Next, embodiments of the invention will be described.
1 is a side view showing an overall configuration of a transplanter according to an embodiment of the present invention, FIG. 2 is a side view of a planting part, FIG. 3 is a side view of a seedling planting claw part, and FIG. 4 is a seedling. FIG. 5 is a driving explanatory diagram of the seedling planting unit, FIG. 6 is a driving explanatory diagram of the seedling planting claw, FIG. 7 is a sectional view of the rotary case, and FIG. 8 is an explanation of the swing cam portion. FIG. 9 is an explanatory diagram of the groove cam portion, FIG. 10 is a plan explanatory diagram of the planting claw portion, FIG. 11 is an explanatory diagram of the seedling pushing member, FIG. 12 is an explanatory diagram of the locus of the seedling planting claw, and FIG. 14 is a side view of a seedling planting claw, FIG. 15 is a diagram of 0 ° and 180 ° positions of a seedling planting claw, and FIG. 16 is a 45 ° and 225 ° view of a seedling planting claw. FIG. 17 is an explanatory diagram of the 90 ° and 270 ° positions of the seedling planting nails, and FIG. 18 is an explanatory diagram of the 135 ° and 315 ° positions of the seedling planting nails.
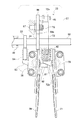
図1、図2に示す如く、走行部1の前部上にエンジン2を搭載し、前下部に操向輪となる前車輪3を支承し、後下部に後車輪4を支承している。そして、エンジン2の後方にミッションケース5を配置し、エンジン2の出力軸よりミッションケース5を介して動力を伝達して前車輪4を駆動する。走行部1の中央上には運転操作部6を設け、操向ハンドル7及びその後部に座席8を配置している。走行部1の前部のボンネット両側には予備苗台9を配置し、走行部1の後部には苗植付装置10を配置している。苗植付装置10は昇降機構34を介して昇降可能としており、走行部1の後部にトップリンク11及びロアリンク12を介して苗植付装置10を連結し、該昇降機構34を座席8下方に配置した昇降シリンダ13により昇降可能に構成している。こうして後植え式の乗用形移植機としている。
As shown in FIGS. 1 and 2, the
苗植付装置10は左右往復移動する苗載台14と、苗載台14上の苗トレイ15より1株分のセル成形苗Nを取出して圃場の畝面に直接的に植付ける苗植付爪16とを備え、車体を走行させながら畝面上に一定間隔毎にセル成形苗Nを移植するように構成している。前記苗載台14は横送りネジ軸25及びガイドローラ26などを介し往復移動される構成とし(図2)、該苗載台14上に苗トレイ33が載置される。該苗トレイ33は碁盤の目状に凹部(ポット)を形成して、各凹部内に用土を充填して播種し、セル成形苗Nを育てるものである。
The
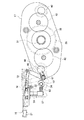
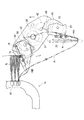
図3に示す如く、前記苗植付ユニット80は、1つの苗トレイ15に対し2組の苗植付爪16により苗Nの取出し及び植付けを行うもので、同一植付軌跡A上で180度位相を異ならせて、1つの植付軌跡A中で2回の苗取り及び苗植付けを行って2株の苗Nを植付けて、苗植付速度を略2倍に増速させて高速植付作業を行うように構成している。
As shown in FIG. 3, the
図3乃至図14に示す如く、前記苗植付装置10は、進行方向に対して苗植付爪16の前方に苗載台14を配置し、苗載台14上に戴置した2つの苗トレイ15・15を植付伝動ケース33の左右一側から突出する横送りネジ軸25及びガイドローラ26などを介して横送り駆動により往復移動させると同時に、左右他側から突出する軸34を介し縦送り駆動させるとともに、各苗トレイ15に対し2つの苗植付ユニット80・80を左右平行に並設し、1つの苗トレイ15に対して2つの苗植付ユニット80・80で一度に苗取出しを行うようにしている。つまり、1つの苗トレイ15に対し2つの苗植付爪16を備えた苗植付ユニット80が2組あるために、一度に4つの苗植付爪16・16・16・16で2つの苗トレイ15・15からそれぞれ苗取出しを行うようにしている。
As shown in FIGS. 3 to 14, the
前記苗植付ユニット80は、2つの苗植付爪16・16と、苗植付爪16を駆動する第1ロータリケース17及び第2ロータリケース18と、苗植付爪16を首振り動作させる首振り用溝カム19と、苗植付爪16の左右爪体20・21を開閉する開閉カム22と、左右爪体20・21に挾持する苗Nの押出機構23を動作させる苗押出カム24とを備えるもので、苗植付ユニット80の左右外側に苗植付爪16を駆動するための駆動機構81a・81aをそれぞれ配置して伝動フレーム82から延設した支持フレーム83・83によって支持し、伝動フレーム82に内挿した植付伝動ケース33の出力軸35から苗植付駆動機構81a・81aを介して苗植付ユニット80・80に動力を伝達し、苗植付爪16を駆動するようにしている。苗載台14に苗トレイ15を複数配置する場合、内側で左右隣接する2つの苗植付ユニット80・80の駆動機構81a・81aを共用として、苗植付ユニット80・80間に配置した1つの苗植付駆動機構81bにより苗植付ユニット80・80を駆動するようにしている。本実施例では4つの苗植付けユニット80を配置して4条植えとしており、伝動フレーム82の左右両外側と左右中央から支持フレーム83を後方に突出して、左右両側と中央から苗植付ユニット80・80に動力を伝達する構成としている。
The
苗植付けユニット80は、鉛直方向に対し左右外側に傾斜させて設けるもので、一対の苗植付けユニット80における苗植付爪16・16を後面視「ハ」字状に配置している。すなわち、前記左右方向水平に配置した伝動フレーム82から後水平方向に延設した支持フレーム83の先端部の側面に駆動受軸28を所定角度で固定させ、植付伝動ケース33の出力軸35に苗植付爪駆動機構81を介し連結する植付入力軸31に外筒軸32をスプライン嵌合させ、外筒軸32を受軸28に回転自在に支持させている。そして、第1ロータリケース17の中央に外筒軸32一端側を固定させ、第1ロータリケース17内で外筒軸32上にサンギヤ38を遊嵌させ、該サンギヤ38の一端を駆動受軸28に噛合又は機体側に固定させている。サンギヤ38にはその両側の第1ロータリケース17に支持した中間軸41・41上に遊嵌したアイドルギヤ42・42を噛合させている。
The
また、第1ロータリケース17両端に出力軸39・39を回転自在に支持させ、該第1ロータリケース17内の出力軸39上にプラネタリギヤ40を一体的に設け、該プラネタリギヤ40を前記アイドルギヤ42に噛合させている。そして、プラネタリギア40と、該プラネタリギア40とアイドルギア42を介して連結させる前記サンギヤ38とのギヤ比を1:3に形成して、第1ロータリケース17が一方向に1回転するとき出力軸39を逆方向に2回転させるように構成している。
Further,
また、図7において、第1ロータリケース17の右側に第2ロータリケース18を配置し、第2ロータリケース18の一端側を前記出力軸39に固定させている。出力軸39には爪出力軸43を回転自在に内挿させ、爪出力軸43一端に形成したギヤ43aに、図8にも示す如く、揺動アーム44の一端側に形成した扇形状の部分ギヤ45を噛合させている。揺動アーム44は中間部を第1ロータリケース17に支点軸46を介して揺動自在に支持して、該揺動アーム44の他端側にローラ47を回転自在に支持させ、前記駆動受軸28に入力軸31を略中心として形成したエンドレス状の溝カム19内にローラ47を嵌合させて案内させるように構成している。
In FIG. 7, the second
また、前記第2ロータリケース18内に臨ませて配置した爪出力軸43上にサンギヤ48を固定させ、該サンギヤ48に第2ロータリケース18の略中央に支持した中間軸51に回転自在に遊嵌した第1アイドルギヤ52を噛合させている。そして更に、第1アイドルギヤ52に第2ロータリケース18の他端に回動自在に支持した首振り軸49の一端に形成したプラネタリギヤである出力ギヤ50を噛合させている。また、パイプ状に構成した首振り軸49の軸心側に回転自在に内挿するカム軸53の一端にプラネタリギヤである出力ギヤ54を設け、該出力ギヤ54を前記第1アイドルギヤ52と一体的に構成した第2アイドルギヤ55と噛合させている。こうして爪出力軸43から首振り軸49とカム軸53を同時に駆動できるようにしている。
Further, a
前記サンギヤ48と第1アイドルギヤ52及び第2アイドルギヤ55と出力ギヤ54を同一歯数で、第1アイドルギヤ52と出力ギヤ50のギヤ比を2:3として、首振り軸49の出力ギヤ50とカム軸53の出力ギヤ54の回転差が一回転となるように設定し、首振り軸49に連結する苗植付爪16の揺動時にはカム軸53を苗植付爪16に対し常に一定回転させる状態とさせて、無理のない溝カム19形状で、カム軸53に固設する開閉カム22及び苗押出カム24のスムーズな回転を行うように構成している。
The
そして、図12にも示す如く、入力軸31を中心とした第1ロータリケース17の反時計方向(実線矢印方向)の一回転に対し爪出力軸43を中心として第2ロータリケース18を時計方向(破線矢印方向)に二回転させ、第1ロータリケース17の一回転(第2ロータリケース18の二回転)によって苗植付爪16の支点部となるカム軸53に図12におけるKに示す如き略3角形状の植付基本軌跡Kを描かせるように構成している。
Then, as shown in FIG. 12, the second
さらに、図6、図10に示す如く、第2ロータリケース18の右側に爪ケース57を配置し、第2ロータリケース18に支持した前記首振り軸49一端側に爪ケース57を固定させている。図10、図14に示す如く、爪ケース57にはカム軸53に対して直角方向に左右の開閉軸58・59を支持させている。該左右開閉軸58・59は図14において爪ケース57より上方に突出し、該左右開閉軸58・59の一端(上端)にそれぞれ左右爪体20・21を固定している。また、該左右開閉軸58・59の他側(下部)にはそれぞれ左右開閉板60・61を左右中央側に突出するように固定して、中央で係合する構成としている。そして、爪ケース57に凹部を形成し、該凹部内に開用コイルバネ62を収納させ、該開用コイルバネ62の他側を一方の開閉板61に当接させている。即ち、開閉板60・61と爪ケース57との間に開用コイルバネ62を介設させて、該開用コイルバネ62の付勢力により開閉板60・61を押して爪体20・21を開く方向に付勢させている。また、一方の(左の)開閉軸58には他方(左)の開閉板60と反対側に開閉用操作板63を突出して設けて、中間部材64の先端に当接するように配置している。
Further, as shown in FIGS. 6 and 10, a
また、前記首振り軸49より爪ケース57内にカム軸53を突出させて、該カム軸53上に板状開閉カム22と後述する苗押出カム24を平行に固定し、開閉カム22と前記開閉用操作板63との間に中間部材64を配置している。該中間部材64は爪ケース57に摺動自在に支持し、該中間部材64の一端側を開閉用操作板63に当接させ、他端側を開閉カム22の外周面に当接させている。該開閉カム22には大径部と小径部を有し、小径部に中間部材64の一端が当接しているときに爪体20・21が開くようにしている。
Further, the
このような構成において、カム軸53の回動により開閉カム22を回転させて、中間部材64を大径部に当接させると、中間部材64が爪体20・21側へ押されて摺動し、該中間部材64の摺動により開閉用操作板63が押されて左開閉軸58が回動し、該左開閉軸58に固定された左爪体20が反時計回りに回転する。この回転により左開閉板60も回転して右開閉板61を押し、右開閉軸59が回転して、該右開閉軸59に固設した右爪体21が時計回りに回転する。こうして爪体20・21を閉じることができ、セル成形苗Nを挟持することができる。この状態からカム軸53が逆方向に回転すると、開閉カム22の回転により、中間部材64は大径部から小径部に当接する。このとき開用コイルバネ62の付勢力により、右開閉板61を常時開方向に付勢しているため、この付勢力により押されて、右爪体21が反時計回りに回転し、この回転により左開閉板60が押されて左爪体20が時計回り回転して、爪体20・21が開く。
In such a configuration, when the opening /
また、前記左右爪体20・21の間にはセル成形苗Nを押出す苗押出部材72を配設し、押出機構23により苗押出部材72を往復駆動するように構成している。図10、図11、図14に示す如く、該苗押出部材72は先端部72bを二股状に形成して平面視Y字状に構成し、他側端に輪状に形成した基端部72aを設けている。そして、基端部72aに押出アーム66の先端に固設した軸65を挿入して、苗押出部材72を押出アーム66に枢支させるとともに、押出アーム66他端の基部側は爪ケース57に支持したアーム軸67に枢支させている。アーム軸67はカム軸53と平行に配置して、左右爪体20・21とはカム軸53に対して前後反対側に配置している。押出アーム66と爪ケース57との間には弾性部材としてバネ70を介装してアーム軸67上に外嵌させ、該バネ70の付勢力により押出アーム66を左右爪体20・21側へ回動させるように付勢している。そして、押出アーム66の基端部にカム軸53側へ突出する凸部66aを形成している。
A
一方、前記カム軸53上において、前記開閉カム22よりも外側に前記凸部66aに対向して苗押出カム24を固設し、該苗押出カム24の外周面に凸部66aを当接させている。該苗押出カム24は大径部と小径部を有し、凸部66aが大径部と当接しているときには押出アーム66を後退した位置に回動させ、苗押出カム24の回転作用で凸部66aが苗押出カム24の小径部と当接すると、バネ70の付勢力により押出アーム66を左右爪体20・21側へ回動させて、苗押出部材72を左右爪体20・21に沿って進出摺動させる。こうして、苗押出カム24の回動により苗押出部材72を往復移動させることができるようにしている。
On the other hand, on the
前記苗押出部材72はゴム或いは樹脂材などの弾性を有する部材で構成し、先端部72bを先端側が開く二股状に形成して、左右爪体20・21の間に配置し、先端部72bの先端を左右爪体20・21の内側に摺接させている。
The
そして、図14において、左右爪体20・21の上下中心線L1が水平方向に位置しているとすると、苗押出部材72の中心線L2を下方に(爪ケース57側)に傾斜して配置し、中心線L1・L2の交点が左右爪体20・21の先端に位置するように構成している。このように構成することにより、セル成形苗Nの根鉢部分を左右爪体20・21で挟持したときに、セル成形苗Nが水平に位置した状態で茎や葉の部分が苗押出部材72上に位置するようになって、左右爪体20・21の中心線とセル成形苗Nの中心線が略一致するようになり、搬送するときに、セル成形苗Nの姿勢が崩れることないのである。そして、畝上へ搬送して、苗押出部材72の摺動により押し出す時に、苗押出部材72の先端部72bがちょうど根鉢部分が当たるようになり、正確に移植することができるのである。
In FIG. 14, assuming that the vertical center line L1 of the left and
また、図14に示す如く、ガイド75により前記苗押出部材72の長手方向中途部を位置規制させている。即ち、該ガイド75は苗植付爪16の後部(左右爪体20・21と反対側)に位置して爪ケース57に取り付けている。該ガイド75の上部は苗押出部材72の基部側のロッド部の外形に合わせた環状に構成して、苗押出部材72の基部側のロッド部を挿入している。ガイド75の下部は雄ネジに構成し、爪ケース57の上部に螺装してロックナット76により高さ調節可能に固定できるように構成している。つまり、ガイド75の高さを調整することにより前記苗押出部材72の中心線L2の傾斜角度を調節できるようにしている。こうして、苗押出部材72を摺動させるときに上下左右をガイド75で規制することで位置がずれることがなく確実に苗押出しを行うように構成している。そして、苗押出部材72を下動させるときには、苗押出部材72先端部72bは左右爪体20・21の内面に沿って摺動することになり、セル成形苗Nを押出すと同時に爪体20・21内面に付着する養土や土を落すことができるのである。
Further, as shown in FIG. 14, the
以上のような構成において、苗載台14をガイドローラ26などを介し左右方向に往復摺動させて、取出位置付近で苗トレイ15を略垂直姿勢に保持し、苗トレイ15の開口取出側を後方に位置させ、苗載台14後方に配置した苗植付爪16を後方下側より略水平に苗トレイ15のポット内に突入させてセル成形苗Nの取出しを行うようにしている。この際、図3、図12、図15乃至図18に示す如く、第1ロータリケース17が入力軸31を中心として反時計方向(実線矢印方向)に一回転するとき、第2ロータリケース18は出力軸43を中心として時計方向(破線矢印方向)に二回転する。この回転中において、図8に示す如く、第1ロータリケース17の受軸28に設けた首振り用溝カム19に揺動アーム44の一端に設けたローラ47を転動自在に嵌合させて、揺動アーム44を支点軸46を中心に揺動させ、該揺動アーム44の他端に設けた部分ギヤ45と噛合するギヤ43aを回転させる。この回転により爪出力軸43のサンギヤ48が第1アイドルギヤ52及び第2アイドルギヤ55を回動し、第1アイドルギヤ52に噛合した出力ギヤ50により爪ケース57が揺動して、苗植付爪16が首振り動作する。このときのカム軸53の回動軌跡が図3に示す如き略3角形の基本軌跡Kとなり、苗植付爪16の先端の回動軌跡が植付軌跡Aとなる。
In the configuration as described above, the
具体的に説明すると、二つの苗植付爪16A・16Bの一方の苗植付爪16Aを、図15に示す如く、苗トレイ15の凹部に挿入させときには、苗植付爪16Aは略水平方向の状態で、左右の爪体20・21を開いた状態で挿入する。このとき第1ロータリケース17及び第2ロータリケース18は一直線上に水平方向に並んでいる。そして、第1ロータリケース17が先端が下方へ回動するときに、第2ロータリケース18は逆回転しているために逆方向(後方)に略水平方向で戻るように動き、セル成形苗Nが苗トレイ15などに接して落ちないようにしている。このときに開閉カム22の回転により、爪体20・21が閉じて、図16に示す如く、苗植付爪16Aがセル成形苗Nの根鉢をつかみ苗トレイ15からセル成形苗Nを抜き取る。
More specifically, when one
そして、第1ロータリケース17の下方への回動と第2ロータリケース18の回動とにより、図17に示す如く、苗植付爪16Aは徐々に下方に姿勢を変える。そして、図18に示す如く、苗植付爪16Aが鉛直方向を向いた位置において、開閉カム22の回転により、爪体20・21が開くと同時に、苗押出カム24の回転により押出アーム66を回動して苗押出部材72を爪体20・21側に摺動させてセル成形苗Nを圃場上に押し出すのである。この苗押出部材72の二股に分かれた先端部72bは爪体20・21の内面に接して配設されているため、苗押出部材72の往復摺動時に爪体20・21内面に付着した土等を擦って落すことができ、土等の付着を防止できるのである。
Then, by the downward rotation of the first
そして、第1ロータリケース17が上方へ回動するととともに第2ロータリケース18も回動して、図15の苗植付爪16Bの如く、苗植付爪16Aは略下方から若干後下方を向いたまま上昇する。このように、垂直方向を向いたまま苗植付爪16を上昇させることにより、セル成形苗Nの植付姿勢が変化せず、苗植付爪16の回動により倒すようなことも防ぐのである。このとき、第1ロータリケース17は半回転し、第2ロータリケース18は略一回転することになる。苗押出部材72は苗植付爪16Aが十分持ち上げられた位置で、苗押出カム24の回転により元の位置に戻る。
Then, as the first
さらに、第1ロータリケース17が回動して、図16、図17、図18の苗植付爪16Bの如く、苗植付爪16Aは垂直方向を向いた状態から徐々に水平方向を向いて、元の位置に戻り、第1ロータリケース17は一回転し、第2ロータリケース18は二回転することになる。
Further, the first
以上のように、本発明の移植機は、苗載台14上に載置した苗トレイ14に収納したセル成形苗Nを取出して圃場に植付ける苗植付爪16と、進行方向に対して苗植付爪16の前方に配置した苗載台14とを備えた乗用形移植機であって、苗植付爪16の支点部となるカム軸53を略3角形状の軌跡Kで移動させると共に、カム軸53を中心として苗植付爪16を首振りさせて苗植付爪16先端を苗植付軌跡Aで移動させ、苗載台14より後方にセル成形苗Nを取出し下方に搬送して圃場に植付けるように構成したものであるから、苗トレイ15から取出したセル成形苗Nの直接植付けを容易に可能とさせると共に、苗トレイ15の取出し苗より上方のセル成形苗Nに悪影響を与えることなく良好にセル成形苗Nを取出してスムーズな直接植付けを容易に可能とさせて作業性の信頼性を向上させることができる。
As described above, the transplanting machine of the present invention takes out the cell-molded seedling N stored in the
また、前記苗植付爪16を左右に並設し、1つの苗トレイ15より2組の苗植付爪16・16でセル成形苗Nを取出して隣接する2条ずつに植付けるようにして、2条同時の苗植付けを可能とさせて、作業効率を向上させることができる。
Further, the
また、前記苗植付爪16の駆動機構81を外側に配置して、2つの苗植付爪16・16を近接して配置して、条間が狭い場合でも2条同時の苗植付けを可能とさせて、作業効率を向上させることができる。また、駆動機構81によりその内側に配置した苗植付爪16を保護することができる。
In addition, the drive mechanism 81 of the
また、前記苗トレイ15を苗載台14上に複数設けた場合には、内側で隣接する左右の苗植付爪16の駆動機構81を共用にして、駆動機構81の数を減少させて、コストの削減させることができ、コンパクトに構成できる。
In addition, when a plurality of the
14 苗載台
15 苗トレイ
16 苗植付爪
53 カム軸(支点部)
81 駆動機構
14 Seedling stand 15
81 Drive mechanism
Claims (4)
4. The transplanter according to claim 3, wherein when a plurality of the seedling trays are provided on the seedling mount, a driving mechanism for the left and right seedling planting claws adjacent to each other is shared.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004121188A JP2005295966A (en) | 2004-04-16 | 2004-04-16 | Transplanter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004121188A JP2005295966A (en) | 2004-04-16 | 2004-04-16 | Transplanter |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005295966A true JP2005295966A (en) | 2005-10-27 |
Family
ID=35328259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004121188A Pending JP2005295966A (en) | 2004-04-16 | 2004-04-16 | Transplanter |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005295966A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013223443A (en) * | 2012-04-20 | 2013-10-31 | Iseki & Co Ltd | Seedling transplanter |
| CN109699255A (en) * | 2019-01-17 | 2019-05-03 | 浙江理工大学 | A kind of rape blanket seedling opens cave and seedling taking transplanting mechanism and its method for transplanting |
| CN118985240A (en) * | 2024-08-30 | 2024-11-22 | 江苏科技大学苏州理工学院 | Full-automatic mobile plug-type bell pepper seedling transplanting and planting integrated machine |
| CN121488789A (en) * | 2026-01-12 | 2026-02-10 | 内蒙古自治区林业科学研究院 | A smart planting device for windbreak and sand-fixing shrubs based on image recognition |
-
2004
- 2004-04-16 JP JP2004121188A patent/JP2005295966A/en active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013223443A (en) * | 2012-04-20 | 2013-10-31 | Iseki & Co Ltd | Seedling transplanter |
| CN109699255A (en) * | 2019-01-17 | 2019-05-03 | 浙江理工大学 | A kind of rape blanket seedling opens cave and seedling taking transplanting mechanism and its method for transplanting |
| CN118985240A (en) * | 2024-08-30 | 2024-11-22 | 江苏科技大学苏州理工学院 | Full-automatic mobile plug-type bell pepper seedling transplanting and planting integrated machine |
| CN118985240B (en) * | 2024-08-30 | 2026-03-10 | 江苏科技大学苏州理工学院 | Full-automatic mobile plug-type bell pepper seedling transplanting and planting integrated machine |
| CN121488789A (en) * | 2026-01-12 | 2026-02-10 | 内蒙古自治区林业科学研究院 | A smart planting device for windbreak and sand-fixing shrubs based on image recognition |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5290741B2 (en) | Seedling transplanter | |
| CN107820805A (en) | Pot seedling transponder and plant transplantation machine | |
| JP2005295966A (en) | Transplanter | |
| JP4220927B2 (en) | Ride type transplanter | |
| CN207754070U (en) | A kind of full-automatic tree-remover | |
| JP4462552B2 (en) | Multi-row type transplanter | |
| JP2005295967A (en) | Transplanter | |
| JP4061324B2 (en) | Vegetable transplanter | |
| JP4162647B2 (en) | Transplanter | |
| JP3821735B2 (en) | Vegetable transplanter | |
| JP4185908B2 (en) | Transplanter | |
| JP4010501B2 (en) | Vegetable transplanter | |
| JP3821737B2 (en) | Vegetable transplanter | |
| JP4056058B2 (en) | Vegetable transplanter | |
| JP2006191901A (en) | Transplanter | |
| JP4056059B2 (en) | Vegetable transplanter | |
| JP5226039B2 (en) | Rice transplanter work machine transmission | |
| JP3821736B2 (en) | Vegetable transplanter | |
| JP2011152091A (en) | Seedling transplanter | |
| JP2006101842A (en) | Transplanter | |
| JP2554827Y2 (en) | Implanting device of transplanter | |
| JPH1189331A (en) | Transplant machine | |
| JP2001333611A (en) | Vegetable transplanter | |
| JP2006180767A (en) | Transplanting machine | |
| JP2006174742A (en) | Transplanter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080715 |
|
| A521 | Written amendment |
Effective date: 20080911 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090421 |