JP2006054681A - 移動体周辺監視装置 - Google Patents
移動体周辺監視装置 Download PDFInfo
- Publication number
- JP2006054681A JP2006054681A JP2004234946A JP2004234946A JP2006054681A JP 2006054681 A JP2006054681 A JP 2006054681A JP 2004234946 A JP2004234946 A JP 2004234946A JP 2004234946 A JP2004234946 A JP 2004234946A JP 2006054681 A JP2006054681 A JP 2006054681A
- Authority
- JP
- Japan
- Prior art keywords
- image
- plane
- vpp
- reference image
- vector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



































Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/107—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using stereoscopic cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8093—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for obstacle warning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/62—Extraction of image or video features relating to a temporal dimension, e.g. time-based feature extraction; Pattern tracking
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
- Measurement Of Optical Distance (AREA)
- Traffic Control Systems (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Closed-Circuit Television Systems (AREA)
Abstract
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
【選択図】図5
Description
前記撮像手段からのステレオ画像を用いてステレオ画像中の平面領域を抽出する平面領域抽出手段と、
前記平面領域抽出手段によって抽出された平面領域以外の領域に対して物体検出処理を行う物体検出手段とを備えることを特徴とする(請求項1記載の発明)。
前記物体検出手段による物体検出処理は、前記平面領域抽出手段によって抽出された平面領域以外の領域の前記特徴点に対して前記参照画像を参照しながらステレオマッチングを用いて物体検出処理を行うようにしてもよい(請求項3記載の発明)。基準画像の平面領域以外の領域の特徴点のみ用いるため、平面領域で抽出された特徴点をステレオマッチングすることが防止され、計算時間を短縮することができるとともに計算コストの低廉化を図ることができる。
前記平面パラメータ算出手段によって算出された位置姿勢パラメータを用いて、物体の前記平面を基準とした空間位置を算出する物体位置算出手段と、を備えるようにしてもよい(請求項5記載の発明)。

基準画像Ib及び参照画像Irに係る画像情報を取得する。
射影変換行列算出部28において、画像記憶部22に記憶された基準画像Ib及び参照画像Irを用いて、路面に対する射影変換行列Hを動的に推定する。
と表すことができる。なお、dXは、微小変化行列DXのパラメータをベクトルで表したものである。
となる。
平面領域抽出部32において、ステップS1で推定した射影変換行列Hを用いて、車両10が走行可能な道路平面領域を抽出する。この抽出処理について、図5を参照して説明する。
平面パラメータ算出部30において、ステップS1で推定した射影変換行列Hを用いて、平面Πの平面パラメータである法線ベクトルn及び基準カメラ12の光学中心Oから平面Πまでの距離dを求める。
(I) 重解を持たない場合(σ1≠σ2≠σ3)
(II) 重解を持つ場合(σ1=σ2≠σ3 又は σ1≠σ2=σ3)
(III) 3重解を持つ場合(σ1=σ2=σ3)
に場合分けして考える。(I)及び(II)の場合は、k=±σ1若しくはk=±
σ3とすると、(3−9)式から算出されるn′が単位ベクトルであることに矛盾する。したがって、いずれの場合でもk=±σ2として求められることになる。また、k=−σ2の場合は2台のカメラ(基準カメラ12及び参照カメラ14)が平面を挟むような配置となるため除外され、kはσ2として求められることになる。なお、(III)の3重解の場合は、2台の基準カメラ12及び参照カメラ14の光学中心が一致し、回転のみの場合であるため、除外する。
となる。
ステップS4は物体を検出する処理であり、図6に示すステップS41〜ステップS46のサブルーチン処理からなる。
ステップS5は物体の相対速度を算出する処理であり、図18に示すステップS51〜ステップS55のサブルーチン処理からなる。
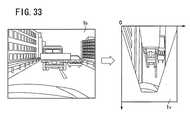
このステップS6は、自車である車両10の自車速度ベクトルVV(図25参照)を求めるために、道路平面Πを仮想的に上方から見たVPP画像を生成するための処理であり、図28に示すステップS61〜ステップS63のサブルーチン処理からなる。すなわち、ステップS61において、基準画像IbをVPP画像に変換(以下、VPP変換とも呼ぶ)するための変換式HVPPを算出する。この後、ステップS62において、求められた変換式HVPPを用いて、前記基準画像IbをVPP画像IVに変換し、記録する(図33参照)。さらに、ステップS63において、同じ変換式HVPPを用いて前記平面領域ΠfをVPP変換して記録する(図34参照)。以下、各ステップS61〜S63について詳細に説明する。
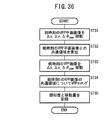
ステップS7は、前記ステップS6で求めたVPP画像IV及びVPP平面画像IVfに基づいて、車両10の自車速度ベクトルVV(図25参照)を求めるための処理であり、図35に示すステップS71〜ステップS77のサブルーチン処理からなる。なお、以下の説明においては、現時刻の処理で得られたVPP画像IV及びVPP平面画像IVfをVPP画像IV(t)及びVPP平面画像IVf(t)と表し、前時刻に得られたものをVPP画像IV(t−1)及びVPP平面画像IVf(t−1)と表して区別する。また、ワールド座標系では車両10の前後方向が座標Zw(図10参照)として規定されているが、前記のとおり、VPP画像IVでは前後方向がY軸と規定されているため、以下のステップS7に関する説明では車両10の前後方向に対応するパラメータには添え字「Y」又は「y」を付けて表す。
と表すことができる。ここで、Rplaneは、VPP平面画像IVf(t−1)、IVf(t)における道路平面Πに相当する領域である。
ステップS8は、検出した物体が静止物体であるか移動物体であるかを判断する処理であり、図38に示すステップS81〜S84のサブルーチン処理からなる。
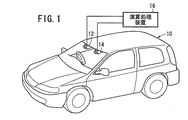
14…参照カメラ 16…演算処理装置
18、20…画像処理部 22…画像記憶部
24…演算制御部 26…パラメータ記憶部
28…射影変換行列算出部 30…平面パラメータ算出部
32…平面領域抽出部 34…物体検出部
36…物体相対速度算出部 38…仮想投影面画像生成部
40…自車速度算出部 42…物体絶対速度算出部
44…表示処理部 50…投票面
52a〜52c、54a〜54c…クラスタ
60…エッジ画像 62…修正エッジ画像
80a〜80c…テンプレート 82a…物体位置領域
Ab、Ar…内部パラメータ Cc…カメラ座標
Cw…ワールド座標 EP…エピポーラライン
H…射影変換行列 Ib…基準画像
Ir…参照画像 Π…平面
d…距離 n…法線ベクトル
t…並進ベクトル
Claims (5)
- 複数のカメラにより、基準画像と参照画像とを含むステレオ画像を撮像する撮像手段と、
前記撮像手段からのステレオ画像を用いてステレオ画像中の平面領域を抽出する平面領域抽出手段と、
前記平面領域抽出手段によって抽出された前記平面領域以外の領域に対して物体検出処理を行う物体検出手段と、
を備えることを特徴とする移動体周辺監視装置。 - 請求項1記載の移動体周辺監視装置において、
前記物体検出手段による物体検出処理は、前記ステレオ画像のステレオマッチングを用いた物体検出処理であることを特徴とする移動体周辺監視装置。 - 請求項1又は2記載の移動体周辺監視装置において、
前記基準画像上の特徴点を抽出する基準画像特徴点抽出手段を備え、
前記物体検出手段による物体検出処理は、前記平面領域抽出手段によって抽出された前記平面領域以外の領域の前記特徴点に対して前記参照画像を参照しながらステレオマッチングを用いて物体検出処理を行うことを特徴とする移動体周辺監視装置。 - 請求項3記載の移動体周辺監視装置において、
前記参照画像における前記平面領域抽出手段にて抽出された前記平面領域以外の領域から、前記特徴点の近傍小領域に対応する小領域を領域ベースマッチングによって特定する参照画像対応部探索手段を備えることを特徴とする移動体周辺監視装置。 - 請求項1〜4のいずれか1項に記載の移動体周辺監視装置において、
カメラに対する前記平面領域に対応する平面の位置姿勢パラメータを算出する平面パラメータ算出手段と、
前記平面パラメータ算出手段によって算出された位置姿勢パラメータを用いて、物体の前記平面を基準とした空間位置を算出する物体位置算出手段と、
を備えることを特徴とする移動体周辺監視装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004234946A JP4297501B2 (ja) | 2004-08-11 | 2004-08-11 | 移動体周辺監視装置 |
| PCT/JP2005/014782 WO2006016661A1 (ja) | 2004-08-11 | 2005-08-11 | 移動体周辺監視装置 |
| EP05770456A EP1783683A4 (en) | 2004-08-11 | 2005-08-11 | MOBILE PERIPHERAL MONITOR |
| US11/659,884 US8154594B2 (en) | 2004-08-11 | 2005-08-11 | Mobile peripheral monitor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004234946A JP4297501B2 (ja) | 2004-08-11 | 2004-08-11 | 移動体周辺監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006054681A true JP2006054681A (ja) | 2006-02-23 |
| JP4297501B2 JP4297501B2 (ja) | 2009-07-15 |
Family
ID=35839420
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004234946A Expired - Lifetime JP4297501B2 (ja) | 2004-08-11 | 2004-08-11 | 移動体周辺監視装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8154594B2 (ja) |
| EP (1) | EP1783683A4 (ja) |
| JP (1) | JP4297501B2 (ja) |
| WO (1) | WO2006016661A1 (ja) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008197720A (ja) * | 2007-02-08 | 2008-08-28 | Mitsubishi Electric Corp | 歩行者警報装置 |
| JP2008250516A (ja) * | 2007-03-29 | 2008-10-16 | Honda Motor Co Ltd | 射影変換収束演算処理方法 |
| JP2009085651A (ja) * | 2007-09-28 | 2009-04-23 | Hitachi Ltd | 画像処理システム |
| JP2009530930A (ja) * | 2006-03-22 | 2009-08-27 | ピルツ ゲーエムベーハー アンド コー.カーゲー | 対応を判別する、好ましくはシーンの三次元再構成をする方法および装置 |
| WO2011090053A1 (ja) * | 2010-01-21 | 2011-07-28 | クラリオン株式会社 | 障害物検知警報装置 |
| JP2011198098A (ja) * | 2010-03-19 | 2011-10-06 | Ihi Aerospace Co Ltd | ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット |
| JP2012185011A (ja) * | 2011-03-04 | 2012-09-27 | Kumamoto Univ | 移動体位置測定装置 |
| JP2013055706A (ja) * | 1997-12-23 | 2013-03-21 | Intel Corp | 画像コンテンツに基づく画像選択法 |
| US8461972B2 (en) | 2009-10-30 | 2013-06-11 | Denso Corporation | Movable object periphery monitoring system and method for controlling data transmission in the same |
| JP2014059646A (ja) * | 2012-09-14 | 2014-04-03 | Toshiba Corp | 対象物検出装置、及び対象物検出方法 |
| JP2015172876A (ja) * | 2014-03-12 | 2015-10-01 | 株式会社デンソーアイティーラボラトリ | 車両周辺監視装置、車両周辺監視システム、及びプログラム |
| JP5838355B2 (ja) * | 2012-06-20 | 2016-01-06 | パナソニックIpマネジメント株式会社 | 空間情報検出装置、人位置検出装置 |
| JP2016161569A (ja) * | 2015-02-26 | 2016-09-05 | 三菱電機株式会社 | オブジェクトの3d姿勢およびオブジェクトのランドマーク点の3dロケーションを求める方法、およびオブジェクトの3d姿勢およびオブジェクトのランドマークの3dロケーションを求めるシステム |
| JP2017084259A (ja) * | 2015-10-30 | 2017-05-18 | 株式会社日本自動車部品総合研究所 | 対応点探索方法、および距離測定装置 |
| JP2019016308A (ja) * | 2017-07-10 | 2019-01-31 | 株式会社Zmp | 物体検出装置及び方法 |
| JP2019117522A (ja) * | 2017-12-27 | 2019-07-18 | 株式会社ミツバ | 障害物検出装置 |
| JP2020016975A (ja) * | 2018-07-24 | 2020-01-30 | Kddi株式会社 | 画像処理装置、方法及びプログラム |
| JP2022184575A (ja) * | 2021-06-01 | 2022-12-13 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| JP2023076903A (ja) * | 2021-11-24 | 2023-06-05 | 三菱電機株式会社 | 路面劣化検出システムおよび路面劣化検出方法 |
| JP2023092987A (ja) * | 2021-12-22 | 2023-07-04 | 大日本印刷株式会社 | プログラム、情報処理方法、及び情報処理装置 |
| WO2025041418A1 (ja) * | 2023-08-24 | 2025-02-27 | 日立Astemo株式会社 | 車載外界認識装置 |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200925023A (en) * | 2007-12-07 | 2009-06-16 | Altek Corp | Method of displaying shot image on car reverse video system |
| US8265425B2 (en) * | 2008-05-20 | 2012-09-11 | Honda Motor Co., Ltd. | Rectangular table detection using hybrid RGB and depth camera sensors |
| JP5326920B2 (ja) * | 2009-08-07 | 2013-10-30 | 株式会社リコー | 画像処理装置、画像処理方法、及び、コンピュータプログラム |
| KR101619076B1 (ko) * | 2009-08-25 | 2016-05-10 | 삼성전자 주식회사 | 모바일 플랫폼의 동적 물체 검출 및 추적 방법 |
| DE102009055776A1 (de) * | 2009-11-25 | 2011-05-26 | Conti Temic Microelectronic Gmbh | Verfahren zur Schätzung des Rollwinkels in einem fahrenden Fahrzeug |
| CN101710932B (zh) * | 2009-12-21 | 2011-06-22 | 华为终端有限公司 | 图像拼接方法及装置 |
| JP5392415B2 (ja) * | 2010-09-22 | 2014-01-22 | 富士通株式会社 | ステレオ画像生成装置、ステレオ画像生成方法及びステレオ画像生成用コンピュータプログラム |
| US8818702B2 (en) * | 2010-11-09 | 2014-08-26 | GM Global Technology Operations LLC | System and method for tracking objects |
| DE102012004198A1 (de) | 2012-03-01 | 2012-10-04 | Daimler Ag | Verfahren und Vorrichtung zur Unterstützung eines Fahrers beim Führen eines Fahrzeugs im Gelände |
| CN103136750B (zh) * | 2013-01-30 | 2015-08-19 | 广西科技大学 | 双目视觉系统的立体匹配优化方法 |
| JP2015184929A (ja) * | 2014-03-24 | 2015-10-22 | 株式会社東芝 | 立体物検出装置、立体物検出方法、および立体物検出プログラム |
| CN104200236B (zh) * | 2014-08-22 | 2018-10-26 | 浙江生辉照明有限公司 | 基于dpm的快速目标检测方法 |
| DE102014114221A1 (de) * | 2014-09-30 | 2016-03-31 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Detektieren von einem Objekt in einem Umgebungsbereich eines Kraftfahrzeugs, Fahrerassistenzsystem und Kraftfahrzeug |
| US10634778B2 (en) * | 2014-10-21 | 2020-04-28 | Texas Instruments Incorporated | Camera assisted tracking of objects in a radar system |
| DE102015220884B4 (de) * | 2014-10-27 | 2022-03-31 | Denso Corporation | Bildverarbeitungsvorrichtung |
| US10284794B1 (en) | 2015-01-07 | 2019-05-07 | Car360 Inc. | Three-dimensional stabilized 360-degree composite image capture |
| JP2018036870A (ja) * | 2016-08-31 | 2018-03-08 | 富士ゼロックス株式会社 | 画像処理装置及びプログラム |
| DE102016225073A1 (de) * | 2016-12-15 | 2018-06-21 | Conti Temic Microelectronic Gmbh | Vorrichtung zur bereitstellung einer verbesserten hinderniserkennung |
| JP6794243B2 (ja) * | 2016-12-19 | 2020-12-02 | 日立オートモティブシステムズ株式会社 | 物体検出装置 |
| US11748844B2 (en) | 2020-01-08 | 2023-09-05 | Carvana, LLC | Systems and methods for generating a virtual display of an item |
| US12548198B2 (en) * | 2020-10-07 | 2026-02-10 | Qualcomm Incorporated | Motion estimation in geometry point cloud compression |
| CN112560769B (zh) * | 2020-12-25 | 2023-08-29 | 阿波罗智联(北京)科技有限公司 | 用于检测障碍物的方法、电子设备、路侧设备和云控平台 |
| US11790665B2 (en) * | 2021-04-29 | 2023-10-17 | Hitachi Astemo, Ltd. | Data driven dynamically reconfigured disparity map |
| US12094169B2 (en) * | 2022-02-16 | 2024-09-17 | GM Global Technology Operations LLC | Methods and systems for camera to ground alignment |
| US12043269B2 (en) | 2022-02-16 | 2024-07-23 | GM Global Technology Operations LLC | Methods and systems for camera to ground alignment |
| US12094220B2 (en) | 2022-02-16 | 2024-09-17 | GM Global Technology Operations LLC | Methods and systems for camera to ground alignment |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02156383A (ja) | 1988-12-08 | 1990-06-15 | Fuji Electric Co Ltd | パターンマッチング方法 |
| JP2989744B2 (ja) * | 1994-06-13 | 1999-12-13 | 株式会社東芝 | 測定面抽出装置及びその方法 |
| US5848374A (en) * | 1995-03-06 | 1998-12-08 | Nippon Telegraph And Telephone Corporation | Map information processing method and apparatus for correlating road location on a road network map |
| DE69829091T2 (de) | 1997-05-22 | 2006-02-09 | Kabushiki Kaisha Topcon | Messungsgerät |
| JPH11252587A (ja) | 1998-03-03 | 1999-09-17 | Matsushita Electric Ind Co Ltd | 物体追跡装置 |
| JP3562751B2 (ja) | 1998-06-09 | 2004-09-08 | 矢崎総業株式会社 | 前方車両検出方法及び装置 |
| JP2000293693A (ja) | 1999-03-31 | 2000-10-20 | Toshiba Corp | 障害物検出方法および装置 |
| JP2001021345A (ja) | 1999-07-07 | 2001-01-26 | Tokai Rika Co Ltd | 障害物検出装置 |
| EP1248940A1 (en) | 1999-11-12 | 2002-10-16 | Go Sensors, L.L.C. | Methods and apparatus for measuring orientation and distance |
| JP4233723B2 (ja) | 2000-02-28 | 2009-03-04 | 本田技研工業株式会社 | 障害物検出装置、障害物検出方法、及び障害物検出プログラムを記録した記録媒体 |
| US6801244B2 (en) | 2000-02-29 | 2004-10-05 | Kabushiki Kaisha Toshiba | Obstacle detection apparatus and method |
| JP2001243456A (ja) * | 2000-02-29 | 2001-09-07 | Toshiba Corp | 障害物検出装置及び障害物検出方法 |
| JP2002157599A (ja) | 2000-11-17 | 2002-05-31 | Nippon Telegr & Teleph Corp <Ntt> | 物体検出認識方法,物体検出認識プログラムを記録した記録媒体および物体監視追跡装置 |
| DE10201523A1 (de) * | 2002-01-17 | 2003-07-31 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Verdeckungsdetektion bei Bildsensorsystemen |
| DE10301468B4 (de) | 2002-01-18 | 2010-08-05 | Honda Giken Kogyo K.K. | Vorrichtung zur Beobachtung der Umgebung eines Fahrzeugs |
| JP3945279B2 (ja) | 2002-03-15 | 2007-07-18 | ソニー株式会社 | 障害物認識装置、障害物認識方法、及び障害物認識プログラム並びに移動型ロボット装置 |
| JP2004030453A (ja) | 2002-06-27 | 2004-01-29 | Starlabo Corp | ステレオマッチング方法、ステレオマッチングプログラム及びステレオマッチングプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP3868876B2 (ja) * | 2002-09-25 | 2007-01-17 | 株式会社東芝 | 障害物検出装置及び方法 |
| US6900731B2 (en) * | 2002-10-30 | 2005-05-31 | Bellsouth Intellectual Property Corporation | Method for monitoring and tracking objects |
| JP2004177295A (ja) * | 2002-11-27 | 2004-06-24 | Toyota Central Res & Dev Lab Inc | 距離情報選択方法及び距離情報選択装置 |
| JP2004234423A (ja) * | 2003-01-31 | 2004-08-19 | Seiko Epson Corp | ステレオ画像処理方法およびステレオ画像処理装置、並びにステレオ画像処理プログラム |
| JP3977802B2 (ja) * | 2003-12-16 | 2007-09-19 | 株式会社東芝 | 障害物検出装置、障害物検出方法および障害物検出プログラム |
| US20050196015A1 (en) | 2004-03-02 | 2005-09-08 | Trw Automotive U.S. Llc | Method and apparatus for tracking head candidate locations in an actuatable occupant restraining system |
| CN101015200A (zh) * | 2004-09-10 | 2007-08-08 | 松下电器产业株式会社 | 摄像机和摄像机装置 |
| JP2006143009A (ja) * | 2004-11-19 | 2006-06-08 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| US7639841B2 (en) * | 2004-12-20 | 2009-12-29 | Siemens Corporation | System and method for on-road detection of a vehicle using knowledge fusion |
-
2004
- 2004-08-11 JP JP2004234946A patent/JP4297501B2/ja not_active Expired - Lifetime
-
2005
- 2005-08-11 US US11/659,884 patent/US8154594B2/en not_active Expired - Fee Related
- 2005-08-11 WO PCT/JP2005/014782 patent/WO2006016661A1/ja not_active Ceased
- 2005-08-11 EP EP05770456A patent/EP1783683A4/en not_active Withdrawn
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013055706A (ja) * | 1997-12-23 | 2013-03-21 | Intel Corp | 画像コンテンツに基づく画像選択法 |
| JP2009530930A (ja) * | 2006-03-22 | 2009-08-27 | ピルツ ゲーエムベーハー アンド コー.カーゲー | 対応を判別する、好ましくはシーンの三次元再構成をする方法および装置 |
| US8135211B2 (en) | 2006-03-22 | 2012-03-13 | Pilz Gmbh & Co. Kg | Method and device for three-dimensional reconstruction of a scene |
| JP2008197720A (ja) * | 2007-02-08 | 2008-08-28 | Mitsubishi Electric Corp | 歩行者警報装置 |
| JP2008250516A (ja) * | 2007-03-29 | 2008-10-16 | Honda Motor Co Ltd | 射影変換収束演算処理方法 |
| US8036449B2 (en) | 2007-03-29 | 2011-10-11 | Honda Motor Co., Ltd. | Projective transformation convergence calculation method |
| JP2009085651A (ja) * | 2007-09-28 | 2009-04-23 | Hitachi Ltd | 画像処理システム |
| US8461972B2 (en) | 2009-10-30 | 2013-06-11 | Denso Corporation | Movable object periphery monitoring system and method for controlling data transmission in the same |
| WO2011090053A1 (ja) * | 2010-01-21 | 2011-07-28 | クラリオン株式会社 | 障害物検知警報装置 |
| JP2011149810A (ja) * | 2010-01-21 | 2011-08-04 | Clarion Co Ltd | 障害物検知警報装置 |
| JP2011198098A (ja) * | 2010-03-19 | 2011-10-06 | Ihi Aerospace Co Ltd | ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット |
| JP2012185011A (ja) * | 2011-03-04 | 2012-09-27 | Kumamoto Univ | 移動体位置測定装置 |
| JP5838355B2 (ja) * | 2012-06-20 | 2016-01-06 | パナソニックIpマネジメント株式会社 | 空間情報検出装置、人位置検出装置 |
| JP2014059646A (ja) * | 2012-09-14 | 2014-04-03 | Toshiba Corp | 対象物検出装置、及び対象物検出方法 |
| JP2015172876A (ja) * | 2014-03-12 | 2015-10-01 | 株式会社デンソーアイティーラボラトリ | 車両周辺監視装置、車両周辺監視システム、及びプログラム |
| JP2016161569A (ja) * | 2015-02-26 | 2016-09-05 | 三菱電機株式会社 | オブジェクトの3d姿勢およびオブジェクトのランドマーク点の3dロケーションを求める方法、およびオブジェクトの3d姿勢およびオブジェクトのランドマークの3dロケーションを求めるシステム |
| JP2017084259A (ja) * | 2015-10-30 | 2017-05-18 | 株式会社日本自動車部品総合研究所 | 対応点探索方法、および距離測定装置 |
| JP2019016308A (ja) * | 2017-07-10 | 2019-01-31 | 株式会社Zmp | 物体検出装置及び方法 |
| JP2019117522A (ja) * | 2017-12-27 | 2019-07-18 | 株式会社ミツバ | 障害物検出装置 |
| JP2020016975A (ja) * | 2018-07-24 | 2020-01-30 | Kddi株式会社 | 画像処理装置、方法及びプログラム |
| JP2022184575A (ja) * | 2021-06-01 | 2022-12-13 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| JP2023076903A (ja) * | 2021-11-24 | 2023-06-05 | 三菱電機株式会社 | 路面劣化検出システムおよび路面劣化検出方法 |
| JP2023092987A (ja) * | 2021-12-22 | 2023-07-04 | 大日本印刷株式会社 | プログラム、情報処理方法、及び情報処理装置 |
| JP7750084B2 (ja) | 2021-12-22 | 2025-10-07 | 大日本印刷株式会社 | プログラム、情報処理方法、及び情報処理装置 |
| WO2025041418A1 (ja) * | 2023-08-24 | 2025-02-27 | 日立Astemo株式会社 | 車載外界認識装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4297501B2 (ja) | 2009-07-15 |
| EP1783683A1 (en) | 2007-05-09 |
| EP1783683A4 (en) | 2009-06-17 |
| WO2006016661A1 (ja) | 2006-02-16 |
| US20090167844A1 (en) | 2009-07-02 |
| US8154594B2 (en) | 2012-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4297501B2 (ja) | 移動体周辺監視装置 | |
| JP4328692B2 (ja) | 物体検出装置 | |
| JP3937414B2 (ja) | 平面検出装置及び検出方法 | |
| US11900627B2 (en) | Image annotation | |
| JP6550881B2 (ja) | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム | |
| US11904843B2 (en) | Autonomous parking systems and methods for vehicles | |
| Guo et al. | A multimodal ADAS system for unmarked urban scenarios based on road context understanding | |
| Kellner et al. | Road curb detection based on different elevation mapping techniques | |
| JP2006053754A (ja) | 平面検出装置及び検出方法 | |
| JP4270386B2 (ja) | 移動体移動量算出装置 | |
| JP7334489B2 (ja) | 位置推定装置及びコンピュータプログラム | |
| Weber et al. | New results in stereo-based automatic vehicle guidance | |
| Nedevschi et al. | Online extrinsic parameters calibration for stereovision systems used in far-range detection vehicle applications | |
| JP5981284B2 (ja) | 対象物検出装置、及び対象物検出方法 | |
| CN120517405B (zh) | 基于三维碰撞体的小车碰撞检测方法 | |
| Huang et al. | Probabilistic lane estimation for autonomous driving using basis curves | |
| JP2001101420A (ja) | 障害物検出装置及びその方法 | |
| CN110488320A (zh) | 一种利用立体视觉检测车辆距离的方法 | |
| Chiang et al. | Driver assistance system based on monocular vision | |
| Liang et al. | Automatic Roadblock Identification Algorithm for Unmanned Vehicles Based on Binocular Vision | |
| Van Crombrugge et al. | Fast Ground Detection for Range Cameras on Road Surfaces Using a Three-Step Segmentation | |
| CN119920124A (zh) | 一种碰撞事件检测方法、介质、设备及系统 | |
| WO2006123438A1 (ja) | ステレオ画像を用いた道路平面領域並びに障害物検出方法 | |
| Unger et al. | Robust LiDAR-Based Parking Slot Detection and Pose Estimation for Shell Eco-Marathon Vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050811 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20071122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090407 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090413 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4297501 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120424 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130424 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130424 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130424 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140424 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |