JP2006134221A - 追従移動装置 - Google Patents
追従移動装置 Download PDFInfo
- Publication number
- JP2006134221A JP2006134221A JP2004324947A JP2004324947A JP2006134221A JP 2006134221 A JP2006134221 A JP 2006134221A JP 2004324947 A JP2004324947 A JP 2004324947A JP 2004324947 A JP2004324947 A JP 2004324947A JP 2006134221 A JP2006134221 A JP 2006134221A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- follow
- moving body
- movement
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/656—Interaction with payloads or external entities
- G05D1/686—Maintaining a relative position with respect to moving targets, e.g. following animals or humans
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
- G05D1/2435—Extracting 3D information
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/617—Safety or protection, e.g. defining protection zones around obstacles or avoiding hazards
- G05D1/622—Obstacle avoidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/20—Specific applications of the controlled vehicles for transportation
- G05D2105/28—Specific applications of the controlled vehicles for transportation of freight
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2107/00—Specific environments of the controlled vehicles
- G05D2107/60—Open buildings, e.g. offices, hospitals, shopping areas or universities
- G05D2107/67—Shopping areas
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/60—Combination of two or more signals
- G05D2111/63—Combination of two or more signals of the same type, e.g. stereovision or optical flow
- G05D2111/64—Combination of two or more signals of the same type, e.g. stereovision or optical flow taken simultaneously from spaced apart sensors, e.g. stereovision
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【課題】 周囲状況に応じたスムーズな追従を行う追従移動装置を提供する。
【解決手段】 周囲状況検出部102からの周囲状況により、追従距離制御部103において先行移動体202との追従距離を設定し、移動制御部104により追従制御を行うことにより、周囲状況に応じて最適な距離を保った、スムーズな追従動作を実現することができる。
【選択図】図1
【解決手段】 周囲状況検出部102からの周囲状況により、追従距離制御部103において先行移動体202との追従距離を設定し、移動制御部104により追従制御を行うことにより、周囲状況に応じて最適な距離を保った、スムーズな追従動作を実現することができる。
【選択図】図1
Description
本発明は、ユーザなどの先行移動体を、適切な距離をおいて追従する追従移動装置に関する。
従来の追従移動装置としては、先行移動体の方向と距離を検出し、先行移動体に一定の距離をおいて追従するものがあった(例えば、特許文献1)。図19は、特許文献1に記載された従来の追従移動装置を示すものである。
図19において、追従移動装置1901の追従センサ1902が、先行移動体1903の方向ΘP、距離LPを計測する。追従移動装置1901は、方向ΘPが0になるように−ΘPの角度だけ回転を行い、先行移動体の方向を向く。また、障害物センサ1904は、周囲の障害物を検出する。
追従の動作は、予め与えられている先行移動体1903との保つべき距離(追従距離)LDと、現在の距離LPとを比較して、現在の距離LPが一定の追従距離LDより小さければ減速、現在の距離LPが一定の追従距離LDより大きければ加速、等しければ現在の速度を維持する制御を行うことにより、先行移動体1903との距離を一定に保つ。
以上のような方向と距離の制御を行うことにより、移動体1901は先行移動体1903の後ろを一定の追従距離LDをおいて追従する。
追従の動作を、図19を用いて説明する。図19において、先行移動体1903が、点線で示した軌跡2001を移動した場合、追従移動装置1901は実線で示す軌跡2002を追従することになる。移動体1901は、その時刻での先行移動体1903への最短経路を動くスムーズな追従が行える。
次に従来の追従移動装置1901の障害物回避の動作について説明する。障害物センサ1904がセンサに反応する距離内に障害物を検出すると、追従動作に割り込みをかけ、予め決められている所定の回転を行い回避動作を行う。センサの範囲外に出れば回避の割り込みが無くなることにより、追従動作が開始される。
一方、先行移動体の軌跡を忠実にトレースして追従する従来知られている別の追従移動装置として、例えば非特許文献1に示されるものがある。追従移動装置は、先行移動体の通過した位置を一定距離間隔で履歴として記憶する。この通過履歴を順次読み込み、その点を通過するように追従移動装置の経路を決定する。また追従移動装置の現在位置と先行移動体の間に存在する通過履歴の数により、追従移動装置の速度を決定する。このようにして、追従移動装置は、先行移動体の通った軌跡とほぼ同じ経路上を、先行移動体との間隔を一定に保つように走行する。
しかしながら、図20に示される従来の追従移動装置1901の動作は、周囲の障害物が少ない広い空間においては、先行移動体1903の進路変更に対して最短経路を通るスムーズな追従動作が可能であるが、逆に障害物が多くある空間においては、最短経路上に障害物が存在する時に、逆に多くの回避動作を必要とすることになる。
図21、図22を用いて、多くの障害物がある場合の従来の追従移動装置の動作について説明する。図21で示すように、複数の障害物2101が存在する中を、先行移動体1903が軌跡2102に沿って移動した場合、追従移動装置1901は、障害物2101が無ければ、軌跡2103を通るように制御される。しかし、軌跡2103の上に障害物2101が存在するので、回避動作の割り込みがかかり、軌跡2103の通りには動けない。
そこで、図22に示すように、障害物回避動作を行った場合の追従移動装置1901の実際に通る軌跡2201を実線で示す。このように、追従装置1901は、障害物が多い環境では、非常に方向転換の多いジグザクした軌跡を動くことになる。これは、方向転換や加減速のために、エネルギーを余計な消耗することになる。また、回りに人がいる場合、頻繁に方向を変える追従移動装置1901は、人の移動の妨げになる。
逆に、非特許文献1に示されるような、先行移動体の軌跡の上を通る制御を行う場合は、前記のような問題は生じない。しかし、一方、障害物の無い空間では、最短経路があるにも係らず、先行移動体の通った経路をなぞる遠回りの経路を通ることになる。また、先行移動体の通った経路は周囲には見えないので、時間をおいて突然向きを変える追従移動装置の動きは周りの人に予測しにくい動きとなってしまうことも考えられる。常に先行移動体の方向を向いて動作する特許文献1に示される制御の場合は、このようなことは少ない。
さらに、例えば先行移動体がユーザであり、ユーザが自分の後ろを荷物など載せた追従移動装置を追従させるなどの利用する場合において、ユーザの意図により追従移動装置の追従の距離を変化させたいという要望がある。例えば重要な荷物を追従移動装置に載せている場合は、荷物に何かあった場合に直ぐに知ることができ、素早く対処できるように、通常の距離より短めに追従させたいと考えることがある。また逆に、複数人で連れ立って歩いている場合などは、自分の直ぐ近くに追従移動装置があると、他の人の邪魔になるので、いつもより距離をおいて追従させたいと考えることがある。しかし、特許文献1、非特許文献1に示される従来の追従移動装置のどちらにおいても、追従距離は装置が予め決めた一定の値であるため、ユーザの要望により変化させることができない。
以上のように、従来の追従移動装置は、追従距離を予め決めた固定の値での制御を行うため、周囲の状況やユーザの意図等によって、追従距離を変化させることができないという課題があった。
本発明は、前記課題を解決するためになされ、その目的とするところは、周囲状況やユーザの意図に応じた追従距離を変化させることにより、障害物などの周囲状況に応じた動きや、ユーザの意図に応じた動きをする追従移動装置を提供することにある。
前記目的を達成するために、本発明は以下のように構成する。
本発明によれば、先行移動体を追従する追従移動装置において、
前記先行移動体を検出する先行移動体検出部と、
前記先行移動体検出部により検出された前記先行移動体との追従距離を可変に制御する追従距離制御部と、
を備えて、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従することを特徴とする追従移動装置を提供する。
前記先行移動体を検出する先行移動体検出部と、
前記先行移動体検出部により検出された前記先行移動体との追従距離を可変に制御する追従距離制御部と、
を備えて、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従することを特徴とする追従移動装置を提供する。
以上のように、本発明は、追従距離制御部において先行移動体との距離を制御して追従するという構成により、状況に応じて適した距離を保ってスムーズな追従動作を実現することができる。
以下に、本発明にかかる実施の形態を図面に基づいて詳細に説明する前に、本発明の種々の態様について説明する。
本発明の第1態様によれば、先行移動体を追従する追従移動装置において、
前記先行移動体を検出する先行移動体検出部と、
前記先行移動体検出部により検出された前記先行移動体との追従距離を可変に制御する追従距離制御部と、
を備えて、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従することを特徴とする追従移動装置を提供する。
前記先行移動体を検出する先行移動体検出部と、
前記先行移動体検出部により検出された前記先行移動体との追従距離を可変に制御する追従距離制御部と、
を備えて、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従することを特徴とする追従移動装置を提供する。
本発明の第2態様によれば、周囲状況を検出する周囲状況検出部をさらに備えて、
前記追従距離制御部が、前記周囲状況検出部で検出された前記周囲状況に基づき前記先行移動体との前記距離を可変に制御することを特徴とする第1の態様に記載の追従移動装置を提供する。
前記追従距離制御部が、前記周囲状況検出部で検出された前記周囲状況に基づき前記先行移動体との前記距離を可変に制御することを特徴とする第1の態様に記載の追従移動装置を提供する。
本発明の第3態様によれば、前記周囲状況検出部で検出される前記周囲状況は、周囲の障害物の状況であることを特徴とする第2の態様に記載の追従移動装置を提供する。
本発明の第4態様によれば、前記追従距離制御部は、前記周囲の前記障害物との距離が前記追従距離より短い場合に、前記先行移動体との前記追従距離をより短くするように可変に制御することを特徴とする第3の態様に記載の追従移動装置を提供する。
本発明の第5態様によれば、前記追従距離制御部が、ユーザから指示された追従距離に基づき、前記先行移動体との前記追従距離を可変に制御することを特徴とする第1〜4のいずれか1つの態様に記載の追従移動装置を提供する。
本発明の第6態様によれば、前記ユーザから指示された前記追従距離は、前記先行移動体と前記追従移動装置の実際の距離に基づき指示された距離であることを特徴とする第5の態様に記載の追従移動装置を提供する。
本発明の第7態様によれば、前記追従距離制御部が、前記先行移動体の速度に基づいて、前記先行移動体との前記追従距離を可変に制御することを特徴とする第1〜6のいずれか1つの態様に記載の追従移動装置を提供する。
本発明の第8態様によれば、前記追従距離制御部が、前記先行移動体の速度の変化に基づいて、前記先行移動体との前記追従距離を可変に制御することを特徴とする第7の態様に記載の追従移動装置を提供する。
本発明の第9態様によれば、前記追従距離制御部が、前記追従移動装置が移動する空間の位置に応じて、前記先行移動体との前記追従距離を可変に制御することを特徴とする第1〜8のいずれか1つの態様に記載の追従移動装置を提供する。
本発明の第10態様によれば、前記先行移動体を追従するように前記追従移動装置を移動させる駆動部をさらに備え、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従するように、前記駆動部を駆動して前記先行移動体を追従することを特徴とする第1〜9のいずれか1つの態様に記載の追従移動装置を提供する。
本発明の第11態様によれば、前記周囲状況検出部で検出される前記周囲状況は、前記追従移動装置が移動しようとする場所の状況又はその場所の近傍の状況であることを特徴とする第2の態様に記載の追従移動装置を提供する。
以下、本発明の実施形態を、図面を参照しながら説明する。
(第1実施形態)
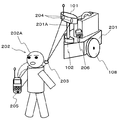
図1は、本発明の第1実施形態における追従移動装置の構成を示すブロック図である。図1において、101は先行移動体202を計測する先行移動体検出部であり、102は二輪走行型のロボットなどの追従移動装置201の周囲の状況を検出する周囲状況検出部であり、103は追従移動装置201の先行移動体202への追従距離を制御する追従距離制御部であり、104は追従移動装置201の移動を制御する移動制御部であり、105は、追従移動装置201の移動を行う駆動部であり、移動制御部104からの目的とする進行方向及び速度等の情報により、回転制御部106左右のモータ107の回転数を制御し、左右の車輪の一例としての左右のタイヤ108を駆動することにより、目的の進行方向及び速度での追従移動装置201の移動を行う。110は、追従距離制御部103や移動制御部104の各種制御におけるパラメータの値を、ユーザなどの指示により設定し、変更するパラメータ設定部である。
図1は、本発明の第1実施形態における追従移動装置の構成を示すブロック図である。図1において、101は先行移動体202を計測する先行移動体検出部であり、102は二輪走行型のロボットなどの追従移動装置201の周囲の状況を検出する周囲状況検出部であり、103は追従移動装置201の先行移動体202への追従距離を制御する追従距離制御部であり、104は追従移動装置201の移動を制御する移動制御部であり、105は、追従移動装置201の移動を行う駆動部であり、移動制御部104からの目的とする進行方向及び速度等の情報により、回転制御部106左右のモータ107の回転数を制御し、左右の車輪の一例としての左右のタイヤ108を駆動することにより、目的の進行方向及び速度での追従移動装置201の移動を行う。110は、追従距離制御部103や移動制御部104の各種制御におけるパラメータの値を、ユーザなどの指示により設定し、変更するパラメータ設定部である。
先行移動体202としては、例えば追従移動装置201を利用するユーザ202Aなどがある。この場合は、荷物を載せた追従移動装置201が自動的にユーザ202Aの後を追従して荷物などを運搬するなどの用途が考えられる。あるいは先行移動体202として自動車を考えれば、人間が運転又は自動運転する自動車に、他の自動車が追従走行する用途なども考えられる(図示せず)。
以上のように大略構成された追従移動装置201について、以下、さらに、その構成、動作、作用を図2〜図10を用いて詳細に説明する。
図2は本発明の第1実施形態における追従移動装置201の外観を示す斜視図である。ユーザの後を追従する場合を示しており、202Aは先行移動体202としてのユーザを表している。
先行移動体202の一例であるユーザ202Aは、その背後に、特定の波長の光を出す光源203を持っている。
先行移動体検出部101は、先行移動体202の背後に装備された特定の波長の光を出す光源203を検出し、かつ、一定の間隔で追従移動装置201の前端に支持柱201Aを介して突出して配置された2台のカメラ204を備えている。この2台のカメラ204により、光源203をそれぞれ検出して、空間ステレオ計測により、光源203の方向及び距離を計測する。すなわち、カメラ204の画像中から光源203の位置を、光源203の波長を手がかりに抽出すれば、画像中での光源203の2次元位置が定まり、カメラ204のレンズ方向及び焦点距離などの情報から、カメラ204から光源203への向きを計算することができる。ただ、距離は1台のカメラ204では求まらないので、カメラ204から光源203の存在する方向を表す1本の直線が求まることから、三角測量の原理で、位置の違う2台のカメラ204で同様の直線を求めれば、その2つの直線の交点が光源203の位置となる。これにより、カメラ204の取り付けられている追従移動装置101からの光源203の方向及び距離を求めることができる。光源203の代わりに特定の波長を出す超音波の発信機を用い、発信機から出された超音波を受信する複数の超音波受信機を用いることにより、同様の計測をすることもできる。その場合は、超音波の到達する時間が距離を表すので、超音波の発信時刻と、各超音波受信器の受信時刻との時間差で距離が求まり、各超音波受信機から等距離の円の交点が、発信機の位置となる。
また、先行移動体202の形状、色などの特徴を画像処理で抽出することにより、先行移動体202に、光源203のような特別な装備を持たせずに、先行移動体202の方向及び距離を計測することもできる。例えば、先行移動体202がユーザつまり人間202Aである場合について、図3を用いて説明する。最初に追従するユーザ202Aの後ろ姿の画像をカメラ204で撮影して登録する。ユーザ202Aの服装の色、模様などをメモリ(図示せず)に記憶しておく。動作時には、各カメラ204でユーザ202Aの後ろ姿を撮影する。左右のカメラ204で撮影された画像が図3(A)、図3(B)である。これらの画像から、頭部301と肩の部分302を、図3(C)、図3(D)に示すように、円303の形状と円弧304の形状とを認識処理によりそれぞれ抽出し、頭部301である円303の中心位置305の座標を各画像で求め、それらの位置から三角測量の原理でユーザ202Aの方向及び距離を計算する。同じ人物を追従するには、登録されたユーザ202Aの画像の肩より下の部分の、服装の色分布、輝度分布、エッジ位置などの情報により、画像中の追従対象が、同一人物と判断して追従する。あるいは、最初の登録した画像から、画像中でのユーザ202Aの位置の変化が少ない、つまり短い時間間隔(例えば1秒以下)で撮影している場合などは、登録領域の動きベクトルを調べて、同じ動きをする動きベクトルを追従すべきユーザ202Aの領域として検出する方法などがある。
以上のような方法により、先行移動体検出部101によって、図4に示すように追従移動装置201の回転中心から距離L、前後軸方向に向かって時計回りにΘの方向に、追従すべき先行移動体202が検出される。
次に、周囲状況検出部102の動作について説明する。図2において、追従移動装置201の前端の上面には、追従移動装置201の周囲の障害物(言い換えれば、追従移動装置201の移動に障害となる物体)を検出して周囲状況データを作成する周囲状況検出部102が装備されている。これは、追従移動装置201の前方の障害物を検出する場合であり、追従が前進のみで後進を行わない場合を考えている。さらに、追従移動装置201の後部、側面などにも、周囲状況検出部102を配置すれば、より広い範囲での検出をすることが可能となる。特に、追従移動装置201の後進などを行う場合は、全周囲の検出が必要となる。
周囲状況検出部102は、追従移動装置201の周囲の障害物の位置などの状況を検出して周囲状況データを作成して出力可能とする。図5、図6、図7を用いて、その検出の動作を説明する。図5の周囲状況検出部102の赤外線距離センサ501によって、放射状に等間隔に、周囲の障害物502までの距離を計測する。計測の原理は光飛行時間測定法と呼ばれるもので、赤外線距離センサで構成する障害物距離センサ501にある発光素子からレーザ光503を発射し、障害物502に反射して戻ってくる反射光を同じ障害物距離センサ501にある受光素子で受光し、発射してから受光するまでの時間を測定すれば、光の速度から障害物502までの距離を求めるものである。レーザ光503の方向をミラー、プリズムなどにより変化させ走査することにより、各方向に対する障害物502の距離を求めることが可能となる。
なお、障害物502の検出には、このレーザ光503の光飛行時間を測定する方法以外にも、超音波が障害物に反射して戻ってくるまでの時間を用いる方式や、複数のカメラを用いて画像処理により空間ステレオ法で検出する方法など、多くの方法がある。
図6に周囲状況検出部102で検出された周囲状況データを示す。レーザ光503の走査方向Sを、追従移動装置201の前後軸方向を0度として、−110度から+110度まで10度間隔で走査した時の、各走査方向Sに対する障害物までの距離Dの値の組となっている。走査距離で、反射光が返ってこない場合は、センサの走査限界の距離Dmax(10.0m)としている。この周囲状況データにより、どの方向に、どれ位の距離で障害物があるか、どの方向が空いているかなどの周囲の状況が判る。図7に、図6の周囲状況データをグラフ化したものを示す。
次に、パラメータ設定部110におけるユーザからのパラメータの設定について説明する。図2において、205はユーザ202Aが追従移動装置201の動作の制御するリモコンであり、このリモコン205でパラメータ設定部110へパラメータを入力することができる。あるいは、パラメータの設定以外にも、緊急停止のためのボタンなどを装備し、緊急時に動作を停止するなどの指示を与えることができる。このリモコン205のストラップの後ろ部分に光源203を装備することにより、ユーザ202Aがリモコン205を首に掛けて装着すれば、自然と光源203がユーザ202Aの後ろに配置されることができる。
また、追従移動装置201を、空港やスーパーなどでの荷物運搬に貸し出す時は、不特定多数のユーザが利用するときに、リモコン205を追従移動装置201のキーとして利用することもできる。
追従移動装置201のパラメータ設定部110へのパラメータの入力手段としては、リモコン205以外にも、追従移動装置本体に装備されたインタフェース206を用いて、パラメータ設定部110へパラメータを入力するようにしてもよい。
駆動部105は、図1、図2に示すように2輪のモータ107とタイヤ108と2つのモータ107を駆動制御する回転制御部106、現在速度検出部109とより大略構成されている。回転制御部106でのモータ107の駆動制御に基づき、両方のタイヤ108を同じ速度で回転させることにより、まっすぐ前進し、左右のタイヤ108の回転数に差を設けることにより、左右に曲がりながら進むことが可能である。また左右のタイヤ108の回転を、反対方向に行うことにより、その場で回転することもできる。現在速度検出部109では、追従移動装置201の現在の移動速度Vを検出し、移動制御部104に出力する。現在の移動速度Vは、左右タイヤ108の回転量を現在速度検出部109の一例としてのロータリエンコーダなどで検出して求めることができる。タイヤ108のスリップなどにより回転数と実際の移動量とに差がでる場合もあるので、加速度センサで加速度を計算してその積分値を用いる方法や、撮像素子で床面のパターンを撮影して、その変化から移動量、速度を検出する方法などを用いれば、より正確な現在の移動速度を検出することができる。
なお、駆動部105は、先行移動体202を追従できるだけの走行性能を持った方向と速度を制御できるものであれば、2輪や4輪などの車輪方式だけでなく、脚歩行のロボットであっても良い。
追従距離制御部103は、周囲状況検出部102で検出されて入力される周囲の状況の情報(周囲状況データ)とパラメータ設定部110で設定されて入力されたパラメータの値とに基づき、追従移動装置201の先行移動体202への追従距離を制御する。この追従距離制御部103において、先行移動体202を追従するときに制御の目標とする追従距離Ldを決定する動作について、図8を用いて説明する。図8は追従距離Ldの決定の動作を説明するためのフローチャートである。
ステップS801では、予め決められた追従距離の初期値Ld0を設定する。これは平均的な状況で、望ましいと考えられる距離を設計時に初期値として予め追従距離制御部103に設定しておけばよい。あるいは使用に際して、ユーザがその状況で望ましいと考えられる距離を、パラメータ設定部110を用いて追従距離制御部103に与えても良い。その与え方の一例としては、先行移動体202がユーザ202Aの場合、停止状態の追従移動装置201に対して、望ましいと考えられる追従距離Ldが値Ld0だけ追従移動装置201から離れた位置から、動作開始の指示を、リモコン205などでユーザ202Aが送るなどの方法が考えられる。このとき、追従距離制御部103は、この開始時に先行移動体202であるユーザ202Aの距離Lを先行移動体検出部101で検出し、初期値Ld0として追従距離制御部103に記憶すればよい。
初期値Ld0の値としては、先行移動体202が人間の場合などは、人間同士が後を追って歩くときと同じ程度の1mから2mの値に設定することが多い。この設定された初期値Ld0により、追従距離LdがLd=Ld0として動作を開始する。
同様に、ステップS801では、追従距離の最小値Ldminを追従距離制御部103に設定する。これは、追従時の先行移動体202であるユーザ202Aに接近する限界の距離を設定することを意味する。例えば、追従距離の最小値Ldminには、先行移動体202であるユーザ202Aが急に停止してもユーザ202Aに追従移動装置201が衝突せずに停止できるように、現在の先行移動体202であるユーザ202Aの速度あるいはユーザ202Aの最高速度から停止までに最低限要する距離を基に安全率を見込んだ値に設定するなどが考えられる。あるいは先行移動体202がユーザ202Aである場合などは、物理的制約や安全が確保される範囲内で、ユーザ202Aの好みにより任意に設定することも可能である。より具体的な例として、追従移動装置201が人間を追従して、人間と同じ数m/分の速度で動く場合は、例えば50cm程度の値を追従距離の最小値Ldminとして設定する。
次に、ステップS802において、周囲状況検出部102から周囲状況データを追従距離制御部103に読み込み、その周囲状況データの中で障害物502までの距離Dの最小値Dminを追従距離制御部103で求める。その後、追従距離制御部103において、仮の追従距離Ldtmpとして、予め与えられている距離調整係数fsを最小値Dminに掛けた値を設定する。例えば距離調整係数fsを0.9とすると、仮の追従距離Ldtmpは(最小値Dmin×0.9)となるので、周囲にある障害物502からの距離よりも先行移動体202からの距離が一番小さくなって先行移動体202が一番近くなり、先行移動体202に追従することになる。距離調整係数fsをより小さくすれば、より先行移動体202へ近づくことになる。こうすることにより、周囲に障害物502が近接している混雑した状況になった場合は、周囲の障害物502より、先行移動体202へより近く接近して追従することになり、障害物502への回避動作を少なくしてスムーズな追従が可能となる。
なお、ここでは、検出対象の範囲内のある距離範囲以内に障害物があれば、混雑した状況と考えている。この距離範囲を設定するための距離としては、追従距離の初期値Ld0とすることができる。よって、混雑しない状況とは、検出対象の範囲内で障害物を全く検出しないというわけではなく、検出対象の範囲内のある距離範囲以内に障害物が無ければ、混雑していない状況であると判断することにしている。より正確には、前記混雑した状況とは、障害物が近接している混雑した状況とも言える。よって、例えば、1つの概念としては、ある距離以内に障害物502を周囲状況検出部102で検出すれば、混雑した状況と判断する一方、前記ある距離以内に全く障害物502を周囲状況検出部102で検出しないならば、混雑していない状況と判断する。また、より具体的な概念の例としては、先行移動体202を中心として左右に110度の角度の範囲内に追従距離の初期値Ld0より近い障害物502が周囲状況検出部102で検出されれば、混雑した状況と判断する。先行移動体202を中心として左右に110度の角度の範囲内に追従距離の初期値Ld0以内に全く障害物502を周囲状況検出部102で検出しないならば、混雑していない状況と判断する。この場合、想定した通常の追従において、混雑した状況では、先行移動体202より近接した障害物502があるということになる。あるいは混雑度を判定する距離として、現在の先行移動体202までの距離Ldを考えると、混雑した状況とは、現在の状況において先行移動体202より近い障害物502があるということである。なお、図12に、追従距離の初期値Ld0の範囲の領域1205を図示している。この領域1205に障害物1203が入った場合には、周囲が混雑していると考えることになる。詳しくは後述するが、追従移動装置201の出発位置1201より少し進みかつ図12において領域1205の右上に障害物1203が入ってくる辺りから、位置1204の少し手前でかつ左右110°の角度の範囲の領域1205内から障害物1203が外に出るまでが、周囲が混雑している状況だと考える。
ステップS803においては、仮の追従距離Ldtmpが追従距離の初期値Ld0より大きいと追従距離制御部103により判断された場合は、周囲の障害物502が十分遠くにあると考えて、ステップS804で、追従距離制御部103により、追従距離Ldをユーザ202Aが一般的な状況で望んでいる追従距離の初期値Ld0に設定する。このステップS803及びS804により、障害物502で混雑した状況から混雑していない状況へ移ったと判断されたときには、追従距離の最初の初期値Ld0に再設定されることを意味する。
ステップS803において、仮の追従距離Ldtmpが追従距離の初期値Ld0より小さいと追従距離制御部103により判断された場合は、ステップS805により、仮の追従距離Ldtmpが追従距離の最小値Ldminより大きいか否かを判定する。
ステップS805において、仮の追従距離Ldtmpが追従距離の最小値Ldminより小さいと追従距離制御部103により判断された場合は、ステップS806において追従移動装置201の停止を移動制御部104に指示する。
追従距離が小さくなるのは、例えば先行移動体202が反転して、追従移動装置201へ真っ直ぐに近づいてきた場合などであり、この場合は前進、方向転換だけでは先行移動体202と一定の距離をとることができない。逆に、ユーザ202Aなどが一部の荷物を取るなどするために追従移動装置201に近づきたい場合に、追従移動装置201が後進して追従距離を一定に保っていては、ユーザ202Aなどは追従移動装置201に近づくことが出来なくなる。このため、前記したように追従移動装置201を停止させるように制御する。先行移動体202との距離が再度、追従移動装置201から離れていき、距離が最小値Ldminより大きくなったら、ステップS807,S804などでの追従が開始される。
ステップS805において、仮の追従距離Ldtmpが追従距離の最小値Ldminより大きいと追従距離制御部103により判断された場合は、ステップS807において追従距離制御部103により追従距離Ldは仮の追従距離Ldtmpに設定する。
移動制御部104は、先行移動体検出部101から入力される先行移動体202の情報と、追従距離制御部103から入力される追従距離と、周囲状況検出部102で検出されて入力される周囲の状況の情報(周囲状況データ)と、パラメータ設定部110で設定されて入力されたパラメータの値とに基づき、回転制御部106を制御して追従移動装置201の移動を制御する。
次に、移動制御部104における動作について説明する。移動制御部104では、衝突する可能性のある障害物502の回避と、先行移動体202への追従の制御を行う。その制御を動作について、図9、図10を用いて説明する。
図8は移動制御部104の全体の動作を説明するフローチャートである。
まず、ステップS901において先行移動体202への追従処理を行い、新しい進行方向と速度が出力される。
次に、ステップS902において、周囲状況検出部102からの周囲状況データを用いて新しい進行方向と速度で追従移動装置201が移動する場合、追従移動装置201が衝突する可能性のある障害物502があるか否かを移動制御部104で判定する。具体的には、追従移動装置201の周囲状況データを示す図6で、進行の角度で、一定の時間×速度分で求まる進行距離より近くに障害物があるかどうかで移動制御部104により判断できる。この一定の時間は、単に次の動作ステップの時間ではなく、障害物502に対する回避処理の時間、安全率なども考慮した時間である。障害物502が急な動きにより追従移動装置201に接近してきた場合などにも、それを周囲状況検出部102が検出して、移動制御部104に回避動作の指示を出し、実際に追従移動装置201が障害物502に対する回避動作を完了するまでのトータルな時間を考慮する必要がある。また、回避動作も行わずに追従移動装置201の移動を停止して障害物502を回避する場合、又は追従移動装置201の進行方向を変化させて障害物502を回避できる場合などあり、現在の速度、周囲状況から、その回避動作が完了するまでの時間も複数ある。それらの回避処理の時間の中で一番時間のかかるもの、あるいは現在の状況から選択される回避処理の時間などを基に、安全率を考慮した時間から、衝突の可能性のある距離である衝突回避限界Dcolを移動制御部104により設定し、衝突回避限界Dcol以内の距離にある障害物502を移動制御部104により検出する。また周囲検出部102で求められる距離は、赤外線距離センサ501から障害物502までの距離であり、追従移動装置201の外形から障害物502までの距離ではない。よって、方向によっては、赤外線距離センサ501より障害物502に近いところに、追従移動装置201の外形がある場合がある。よって、図6の距離は、角度毎にその方向にある追従移動装置201の外形の最遠点と赤外線距離センサ501の位置との距離を引いて移動制御部104により補正する必要がある場合もある。図2、図5に示すように、赤外線距離センサ501が前方の端に位置している場合は、補正の必要がない場合もある。
衝突回避限界Dcolの値を設定するとき、例えば、現在の速度が分速3mであり、回避動作に3秒かかるとすると、15cm以内の障害物は回避できないことになる。そこで、安全率を考慮して30cmを衝突回避限界Dcolとして移動制御部104により設定できる。
ステップS902で、障害物502への追従移動装置201の衝突可能性ありと移動制御部104により判断した場合は、ステップS903の衝突回避動作を移動制御部104により行い、一定距離だけ衝突回避動作を、移動制御部104により駆動部105の移動制御部104を制御して行う。この衝突回避動作においても、先行移動体検出部101による先行移動体202の検出、周囲状況検出部102による周囲状況の計測を行った上で回避動作を行う。回避動作が終了すれば、再度、ステップS901の追従処理を行う。
前記ループにより衝突可能性が無くなった場合、ステップS904において、移動制御部104により、ステップS901で出力された進行方向及び移動速度に基づいて駆動部105の移動制御部104を制御して、追従移動装置201による追従動作を行う。
ステップS905で追従終了の指示が移動制御部104に入るまで、移動制御部104はこの動作ループを継続する。スムーズな動作を行うためには、分速数mで動作している場合には、少なくとも1秒間に数回から数十回は、このループを廻した方が良い。
追従終了の指示は、リモコン205のボタン等で入力することで行う。あるいは追従移動装置201の本体に装備されたインタフェース206に入力しても良い。ただし、先行移動体がユーザ202Aであった場合は、追従移動装置201に接近する必要がある。ユーザ202Aが追従移動装置201に向かって振り返り、真っ直ぐに近づけば、追従移動装置201が停止するので追従移動装置201の本体のインタフェース206を操作できる。
次に、ステップS901での追従処理について、図10の動作のフローチャートを用いて説明する。
まず、ステップS1001において、先行移動体202までの距離L及び先行移動体202の位置する方向Θを先行移動体検出部101から移動制御部104に読み込み、設定された追従距離Ldを追従距離制御部103から移動制御部104に読み込む。また、現在速度検出部109により検出された現在の移動速度Vを移動制御部104に入力する。なお、現在の移動速度Vは、図1、図13の現在速度検出部109でそれぞれ検出可能である。図15においては、移動情報検出部1501で現在の移動速度Vは検出可能であるが、内部的には回転制御部106にも入力して、その部分でのフィードバック制御をすることが可能である。
次いで、ステップS1002において、先行移動体202の方向に追従移動装置201を向かせるため、追従移動装置201の進行方向をΘに移動制御部104により設定する。
次に、ステップS1003において、先行移動体検出部101で検出された先行移動体202までの距離Lと、追従距離制御部103の追従距離Ldとを移動制御部104により比較する。移動制御部104によりL>Ldと判断された場合(ステップS1004)は、先行移動体202へ追いつくため、移動制御部104により、現在の移動速度Vを予め定めた割合a1だけ増加させる。例えば予め定めた割合a1を0.2とすると、新しい速度V×(1+a1)はV×1.2となり、20%速度が速くなる。逆に、移動制御部104によりL<Ldと判断された場合(ステップS1006)は、近づきすぎているので、移動制御部104により、現在の移動速度Vを予め定めた割合a2だけ減少させる。予め定めた割合a2を0.1とすると、新しい速度V×(1−a2)はV×0.9となる。先行移動体202までの距離Lと追従距離Ldが一致した場合(ステップS1005)は、現在の速度Vを維持する。以上の比較は、厳密に数値として一致するという判断ではなく、加速、減速の振動を避けるため、予め定めた一定の差の範囲内に入っていれば、先行移動体202までの距離Lと追従距離Ldは等しいと移動制御部104により判断するようにしてもよい。
最後に、ステップS1007で求めた進行方向Θと速度Vを移動制御部104から移動制御部104に出力する。
次に、図9のステップS903の衝突回避動作について図11を用いて説明する。図11は、衝突回避の動作を説明した模式図である。
図11の(A)において、先行移動体202に追従して移動していた追従移動装置201の方向αに、衝突回避限界Dcol以下の距離に障害物1101がステップS902で周囲状況検出部102により検出されたとする。
すると、移動制御部104の基に回転制御部106が左右のモータ107の駆動を制御して、図11の(B)に示すように、αの方向とは反対側に予め設定されて一定角βだけ追従移動装置201が回転する(図11の(B)では時計回りに一定角βだけ回転する)。この向きで、周囲の障害物(障害物1101や他の障害物)の位置を周囲状況検出部102により計測し、追従移動装置201の最小回転半径や外形の大きさなどから設計時に設定し、移動制御部104に予め記憶されている回避のための距離Mを前進する。前進後、その方向での衝突の可能性がないかを、ステップS902と同様の方法で判定する。再度、障害物との衝突の可能性がある場合は、さらに一定角βを加えた回転を追従移動装置201が行う(図11の(B)では時計回りにさらに一定角βだけ回転する)。この結果、追従移動装置201は、最初の位置からは2β回転することになる。障害物との衝突の可能性が無くなれば、図11の(C)のように、追従移動装置201が回避のための距離Mだけ2β回転した方向に前進する。もし全ての方向に障害物があり、追従移動装置201が360度以上回転しても衝突回避できない場合は、追従移動装置201は移動動作を停止して警告音などによりユーザに通知する。ここで、具体的な数値例としては、衝突回避限界Dcolを30cm、一定角βを30度、回避のための距離Mを60cmとする場合などがある。この数値例の場合、12回、その場で追従移動装置201が回転をしても衝突が回避できそうにない場合は、エラーとなり追従移動装置201の移動動作を停止する。
図11の(C)のように、エラー無く衝突回避動作が行え距離Mだけ追従移動装置201が進行した場合は、そこで再度、ステップS901において、先行移動体検出部101により先行移動体202の方向を検出し、再度追従の動作に移り、図11の(D)のように先行移動体202の方向を向くことになる。先行移動体202を見失わないように、衝突回避動作ステップS903を行うときも、各時刻において(所定の時間毎に)先行移動体検出部101により先行移動体202の検出だけは続けておく方が望ましい。
第1実施形態の追従移動装置201の一連の動作の様子を図12に示す。
スタート地点1201での追従移動装置201は、先行移動体202と追従距離の初期値Ld0をとって追従を開始する。このスタート地点1201での追従移動装置201の中心から左右110度の角度の範囲内で距離Ld0以下の扇形の近傍領域を1205で点線で示している。この領域1205に障害物1203が存在すれば、障害物1203が追従移動装置201に近接している混雑した領域と考えられる。なお、ここでは、このスタート地点1201付近では、領域1205に障害物1203が無い混雑していない状況としているが、もし、領域1205に障害物1203のある混雑した状況の場合には、以下の中間位置1202と同様に、追従距離Ldで追従を開始する。
中間位置1202においては、周囲状況検出部102で検出される周囲の障害物1203の周囲状況データに基づいて、障害物1203で混雑した状況であると追従距離制御部103により判断して追従距離制御部103で追従距離の初期値Ld0より短い追従距離Ldとなるように移動制御部104を制御することにより、追従距離を周囲の状況に合わせた短い追従距離Ldに変更する。これによって中間位置1202の近傍領域1206内に障害物1203の存在する混雑した状況では、先行移動体202に近接して先行移動体202の軌跡202Gの近くを移動することになり、周囲の障害物1203との衝突及び衝突回避動作が少なくなる。
次に、近接領域1207に障害物1203のない混雑していない位置1204に追従移動装置201が移動した時には、再度、追従距離を追従距離の初期値Ld0に戻すことにより、先行移動体202への最短距離を通るスムーズな経路を通ることができる。
なお、第1実施形態において、周囲状況検出部102は、追従移動装置201に搭載されたものとして説明したが、それに限定されることなく、例えば追従移動装置201の移動する空間の天井などに取り付けられたカメラ(図示せず)を周囲状況検出部102の別の例として用いても良い。例えば、天井から下方向を見下ろした広角のカメラにより追従移動装置201と先行移動体202を含む広範囲の画像を撮影する。予め追従移動装置201と先行移動体202と障害物502の無い状況で床面などの背景画像を撮影しておけば、現在撮影された画像から背景画像を差分することにより、床面とは違う新たに現れた領域を抽出することができる。この抽出された領域は、追従移動装置201、先行移動体202、障害物1203のいずれかである。追従移動装置201及び先行移動体202は、それぞれの形状や色などの特徴が判っているので、それらの特徴を元に、抽出された領域から、追従移動装置201と、先行移動体202と、その他障害物502とをそれぞれ検出することができる。その場合、先行移動体202の位置も同時に計測でき、先行移動体検出部101と周囲状況検出部102を同一のカメラ映像を用いて処理することが可能となる。この場合は、追従移動装置201から見て、他の障害物の背後に隠れている障害物、及び先行移動体202も検出できるので、より多くの障害物を検出したり、先行移動体202を見失うことが少なくすることが可能となる。
また、なお第1実施形態において、周囲状況検出部102は、周囲状況データを検出するとしていたが、周囲の壁や障害物502などの位置、形状などの情報が周囲状況検出部102に予め与えられる場合もある。その場合は、検出を行わず、予め与えられ得た位置、形状などの情報を周囲状況検出部102で用いることも可能である。
前記第1実施形態によれば、追従移動装置201の周囲に障害物502が近い混雑した状況になった場合は、周囲の障害物502より、追従移動装置201が先行移動体202へより近く接近して追従することになり、周囲の障害物1203との衝突及び障害物502への回避動作を少なくしてスムーズな追従が可能となる。すなわち、追従距離制御部103において先行移動体202との距離を制御して追従するという構成により、状況に応じて適した距離を保ってスムーズな追従動作を実現することができる。
(第2実施形態)
本発明の第2実施形態にかかる追従移動装置について説明する。本実施形態では追従する先行移動体202として、主に追従移動装置201を利用するユーザ202Aを対象とする。本実施形態は、このような場合にユーザ202Aの意図により追従距離を可変にできる追従移動装置201に係るものである。
本発明の第2実施形態にかかる追従移動装置について説明する。本実施形態では追従する先行移動体202として、主に追従移動装置201を利用するユーザ202Aを対象とする。本実施形態は、このような場合にユーザ202Aの意図により追従距離を可変にできる追従移動装置201に係るものである。
図11の(A)〜(D)は、本発明の第2実施形態における追従移動装置201を示すものである。図11の(A)〜(D)において、第1実施形態の構成と異なるところは、図13に示すように、新たな追従距離の指示Ldusrの値を入力、設定するパラメータ設定部1301と、パラメータ設定部1301により設定されたその新たな追従距離の指示Ldusrの値に基づいて新たな追従動作をするように追従距離を制御してその追従距離を移動制御部104に出力する追従距離制御部1302を設けた点である。第1実施形態と同一の構成は同一の符号を記して説明を省略する。なお、この第2実施形態では、基本的には、単純化させるため、周囲の状況について自動的に検出するのではなく、全てユーザが指定するものであり、周囲が混雑してきたとユーザが思ったら、ユーザが指示を出して距離を入力するものである。よって、図13に図示された周囲状況検出部102は後述する変形例のためのものである。
パラメータ設定部1301においては、ユーザからの追従距離の指示Ldusrの値を読み取る。新たな追従距離の指示Ldusrの値の入力の方法としては、例えばユーザがリモコン205などを持ち、そのキー、ダイアルなどで距離の値を指示してパラメータ設定部1301に入力することができ、直接距離の値を数値で入力する場合や、距離の増減を入力するなどの方法がある。
新たな追従距離の指示Ldusrの値の別の入力の方法として、追従移動装置201の追従距離制御部1302に対して、近寄る、離れるの指示をリモコン205や、音声入力装置(図示せず)や、手振りの画像検出センサ(図示せず)などで伝えることにより、追従移動装置201を実際に動作させ、その追従距離を変化させ、望む距離になった位置で設定の指示を与えることで設定することもできる。この方法では実際の距離を見て判断できるので、数値で入力するより判りやすい。この場合、近づく、離れるの指示に対して、新たな追従距離の指示Ldusrの値を一定の値だけ増減させて追従動作をさせることを繰り返すことにより、追従移動装置201をリモコン205で操作するように制御することが可能である。逆に追従移動装置201を停止させておき、ユーザが動くことで追従距離を変えて、望む追従距離になった時に、設定の指示を与える方法もある。
追従距離制御部1302においては、パラメータ設定部1301から入力された新たな追従距離の指示Ldusrの値から追従距離Ldを求める。この動作について、図14を用いて説明する。図14は追従距離制御部1302の動作を示したフローチャートである。
ステップS1401において、パラメータ設定部1301からの新たな追従距離の指示Ldusrの値を追従距離制御部130に入力し、予め設定されている追従距離の最小値Ldminと、最大値Ldmaxとをパラメータ設定部1301から追従距離制御部130に読み込む。追従距離の最小値Ldminとしては、追従時の先行移動体202に接近する限界の距離が設定されている。例えば先行移動体202が急に停止しても先行移動体202に衝突せずに追従移動装置201が停止できる距離を設定するなどが考えられる。追従距離の最大値Ldmaxとしては、先行移動体202が追従移動装置201から離れた場合の追従の限界の距離が設定されている。例えば先行移動体検出部101の検出限界距離に一定の安全係数を掛けて検出限界距離よりも小さくした値などが考えられる。一例として、ユーザに追従する分速数mの追従移動装置201の場合、追従距離の最小値Ldminを50cm、追従距離の最大値Ldmaxを3mとして設定するなどが考えられる。あるいは追従距離の最小値Ldmin、追従距離の最大値Ldmaxとも、先行移動体202がユーザ202Aである場合などは、物理的制約や安全が確保される範囲内で、ユーザの好みにより設定することも可能である。
次いで、ステップS1402において、新たな追従距離の指示Ldusrの値と追従距離の最小値Ldminとを比較するとともに、新たな追従距離の指示Ldusrの値と追従距離の最大値Ldmaxとを比較する。新たな追従距離の指示Ldusrの値が追従距離の最小値Ldmin以下の場合は、ステップS1403において追従距離Ldとして追従距離の最小値Ldminを設定し、新たな追従距離の指示Ldusrの値が追従距離の最大値Ldmax以上の場合は、ステップS1404において追従距離Ldとして追従距離の最大値Ldmaxを設定する。新たな追従距離の指示Ldusrの値が追従距離の最小値Ldminと追従距離の最大値Ldmaxの間にある場合には、ステップS1405において追従距離Ldとして新たな追従距離の指示Ldusrの値を設定する。これらのステップにより、ユーザが、追従距離の最大値と最小値の範囲外の値を無理に指示しても、そのような値は有効な入力とみなされないため、追従移動装置201が想定外の挙動をすることを防ぐことができる。
以上のように、第2実施形態の追従移動装置201では、パラメータ設定部1301によりユーザの追従距離の指示を追従距離制御部1302が読み取り、追従距離制御部1302において追従距離を制御することにより、ユーザの設定した追従距離でユーザを追従することが可能となり、追従移動装置201がユーザの望む追従距離で追従することができる。
また、ステップS1401で入力された新たな追従距離の指示Ldusrの値を、本発明の第1実施形態における追従距離の初期値Ld0として、図8のステップS803からの処理を行うことにより、周囲に障害物がない場合は、何時でもユーザの望む距離に追従距離を変更することができ、周囲に障害物がある場合は周囲の状況に応じた追従制御を行うことが可能となる。なお、この変形例では、周囲の状況を考慮するため、図13でも、図1と同様に周囲状況検出部102から追従距離制御部1302への情報出力が必要となるため、図13に周囲状況検出部102を図示している。
(第3実施形態)
図15は、本発明の第3実施形態における追従移動装置201を示すものである。図15において、第1実施形態の構成と異なるところは、駆動部105において追従移動体の移動距離及び方向などを検出する移動情報検出部1501と、先行移動体202の速度を算出する先行移動体速度算出部1502と、新しい動作をする追従距離制御部1503と、を設けた点である。第1実施形態と同一の構成は同一の符号を記して説明を省略する。
図15は、本発明の第3実施形態における追従移動装置201を示すものである。図15において、第1実施形態の構成と異なるところは、駆動部105において追従移動体の移動距離及び方向などを検出する移動情報検出部1501と、先行移動体202の速度を算出する先行移動体速度算出部1502と、新しい動作をする追従距離制御部1503と、を設けた点である。第1実施形態と同一の構成は同一の符号を記して説明を省略する。
移動情報検出部1501としては、簡単には、移動制御部104からの進行方向及び速度の指令を蓄積、積分することにより、出発時の原点からの移動の方向及び距離などを計算するもので構成することができる。しかし、モータ107やタイヤ108の回転を正確に積分しても、タイヤ108と床のスリップなどにより実際の移動距離及び方向とずれが生じる場合がある。そのようなずれを無くすためには、移動情報検出部1501としては、移動情報検出部1501自身がそれぞれのタイヤ108の回転角を検出するジャイロや、床面と接して負荷無しに回転するセンサにより実際の移動距離を計測するセンサなどを独自に搭載し、かつ、ジャイロやセンサからの出力情報を基により正確な移動距離及び方向を演算して求めるものでもよい。
先行移動体速度検出部1502において、先行移動体検出部101からの先行移動体202の距離及び方向が入力される。この距離及び方向は、追従移動装置201に対する相対的な位置及び方向であるので、移動情報検出部1501からの追従移動装置201自身が移動した方向及び距離などの移動情報を差し引くことにより、先行移動体202が床、壁などの周りの静止した空間に対して動いた絶対的な移動方向及び距離などを計算することができる。それらを複数時刻分、メモリ(図示せず)に記憶しておき、単位時間当たりの差分を先行移動体速度検出部1502で計算することにより、先行移動体202の速度を算出する。
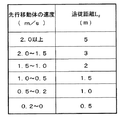
追従距離制御部1503において、先行移動体速度検出部1502から入力される先行移動体202の速度に応じて追従距離を設定する。図16を用いて動作を説明する。図16は先行移動体202の速度と追従距離の変換テーブルの例であり、テーブルに従って、先行移動体202の速度に応じて異なる追従距離Ldを設定する。先行移動体202の速度が速い場合は、追従する追従移動装置201の速度も速くなり、追従移動装置201の停止距離も長くなるため、追従距離も長く設定する。また、追従距離を長く設定すると、追従時に先行移動体202が曲がった場合など、最短経路を通って追従する割合が多くなるため、結果的に、速い速度で追従することになり有利となる。
なお、さらに、先行移動体速度検出部1502で速度の変化を算出することにより、先行移動体202の速度の変化に応じた追従距離の制御を行うこともできる。例えば、速度の変化が多い場合は、追従距離を一定にすると、追従移動装置201の速度も変化が激しくなるので、そのような先行移動体202の速度の変化が多い時は、一定の範囲の中で追従距離を速度に合わせて細かく変化させることにより、追従移動装置201の速度が一定のままで追従することが可能である。
また、図16の変換テーブルは1つに固定されるものではなく、複数の値の異なるテーブルを持ち、周囲の状況、ユーザの指示などにより切り替えて利用してもよい。また、ユーザの指示などを基に、テーブルの値を学習することも可能である。なお、この変形例では、周囲の状況を考慮するため、図15でも、図1と同様に周囲状況検出部102から追従距離制御部1503への情報出力が必要となるため、図15に周囲状況検出部102を図示している。
以上のように、第3実施形態の追従移動装置201では、先行移動体202の速度を算出する先行移動体速度算出部1502と、先行移動体速度算出部1502で算出された先行移動体202の速度を基に追従距離を制御する追従距離制御部1503とを設けることにより、追従する先行移動体202の速度に応じて追従距離を制御することが可能となり、先行移動体202の速度に応じた追従距離の柔軟な制御が可能となる。例えば速度が速い場合は、停止距離、最短経路などを考慮して追従距離を大きくすることができる。
(第4実施形態)
図17は、本発明の第4実施形態における追従移動装置201を示すものである。図17において、第1実施形態の構成と異なるところは、追従移動装置201が移動する空間の場所における情報を検出するエリア情報検出部1701を設けた点である。第1実施形態と同一の構成は同一の符号を記して説明を省略する。なお、周囲の状況を考慮するため、図17でも、図1と同様に周囲状況検出部102から追従距離制御部1302へ情報が出力されている。
図17は、本発明の第4実施形態における追従移動装置201を示すものである。図17において、第1実施形態の構成と異なるところは、追従移動装置201が移動する空間の場所における情報を検出するエリア情報検出部1701を設けた点である。第1実施形態と同一の構成は同一の符号を記して説明を省略する。なお、周囲の状況を考慮するため、図17でも、図1と同様に周囲状況検出部102から追従距離制御部1302へ情報が出力されている。
エリア情報検出部1701において、追従移動装置201が移動する空間の特定の場所におけるエリア情報を検出し、追従距離Ldを制御することで、より柔軟な制御が可能となる。
実際の制御の例を図18を用いて説明する。ユーザ202Aがエレベータ1801の前で停止した場合、通常ならば追従移動装置201は、予め定められた追従距離で離れた位置1802の位置で停止することになる。しかし、周囲に他の人間1803が存在する場合、ユーザ202Aがエレベータ1801に乗り込む時に、追従移動装置201が前記位置1802に位置していたのでは、他の人間1803が障害物となり、追従移動装置201がユーザ202Aと一緒にエレベータ1801にスムーズに乗り込むことが難しくなる。
この場合、エレベータ1801の近くに、その付近がエレベータ1801の前であるというエリア情報を流す発信機1804を設置しておき、エリア情報検出部1701が、このエリア情報を検出した場合、予め追従距離制御部103にエレベータ前の短い追従距離を設定しておき、先行移動体202の近くの短い追従距離だけ離れた位置1805まで追従移動装置201が近寄ることにより、追従移動装置201が先行移動体202と一緒にスムーズにエレベータ1801に乗り込むことが可能となる。
エリア情報の発信機1804は、自ら電波を発信するものであっても良いし、無線タグなどの問い合わせの電波により反応を返すものであっても良い。場所も壁、床、天井など、そのエリア付近に近づいたエリア情報検出部に対して情報を発信できる場所にあればよい。
あるいは、特別な発信機1804が無くても、エリア情報検出部がカメラなどを用いて、エレベータ付近の状況を画像認識して、エレベータ特有のマーカ、表示板、扉の形状を認識することにより、付近がエレベータ前であることを認識しても良い。又は、追従移動装置201自身が地図情報を予め持っておき、現在の自身の位置を元に、そこに記された情報から読み取っても良い。
エレベータ以外にも、各種の入り口、ドアなどにおいて、同様の動作をすることが可能である。例えば、先行移動体202が店に立ち寄った場合、荷物預け入れカウンターに立ち寄った場合等に、盗難防止などのために、追従距離を短くするなどの制御が考えられる。
また逆に、セキュリティゲートを通過する場合や、トイレなどに入る場合など、常に追従されては困る場合がある。その場合、エリア情報により、トイレであれば、追従距離を離す、あるいは移動制御部104で、エリア情報に指定されている位置で停止して、ユーザを待つなどの動作を行わせることも可能である。
なお、以上の第1〜第4実施形態では、先行移動体検出部101として、先行移動体202の追従移動装置201からの相対的な方向と距離を検出するものとしたが、これに限定されることなく、先行移動体202の絶対的な位置を検出し一定時間毎に蓄積することで、先行移動体202の軌跡202Gを検出しても良い。ただし、軌跡202Gを検出する場合は移動制御部104では、先行移動体202の軌跡202Gの後をたどる制御を行うことが普通であり、第1実施形態における、障害物の少ない領域で最短経路を通るという効果は生じない。ただし、他の効果は同様に得られる。また、第2実施形態及び第3実施形態における効果は、先行移動体202の方向及び距離を検出する場合も、軌跡202Gを検出する場合も、同じ効果が得られる。
なお、前記様々な実施形態のうちの任意の実施形態を適宜組み合わせることにより、それぞれの有する効果を奏するようにすることができる。
本発明の追従移動装置は、障害物などの状況に応じた追従距離を保ってスムーズな追従が可能なので、多様で変化する環境下で人や先行車に追従する移動装置や、特に人込みで利用者を追従する荷物運搬などの移動装置等として有用である。
101 先行移動体検出部
102 周囲状況検出部
103 追従距離制御部
104 移動制御部
105 駆動部
106 回転制御部
107 モータ
108 タイヤ
109 現在速度検出部
110 パラメータ設定部
201 追従移動装置
202 先行移動体
202A ユーザ
202G 軌跡
203 光源
204 カメラ
205 リモコン
206 インタフェース
301 頭部
302 肩の部分
303 円
304 円弧
305 円の中心位置
501 赤外線距離センサ
502 障害物
503 レーザ光
1203 障害物
1301 パラメータ設定部
1302 追従距離制御部
1501 移動情報検出部
1502 先行移動体速度算出部
1503 追従距離制御部
1701 エリア情報検出部
1801 エレベータ
1802 位置
1803 他の人間
1804 発信機
1805 位置
102 周囲状況検出部
103 追従距離制御部
104 移動制御部
105 駆動部
106 回転制御部
107 モータ
108 タイヤ
109 現在速度検出部
110 パラメータ設定部
201 追従移動装置
202 先行移動体
202A ユーザ
202G 軌跡
203 光源
204 カメラ
205 リモコン
206 インタフェース
301 頭部
302 肩の部分
303 円
304 円弧
305 円の中心位置
501 赤外線距離センサ
502 障害物
503 レーザ光
1203 障害物
1301 パラメータ設定部
1302 追従距離制御部
1501 移動情報検出部
1502 先行移動体速度算出部
1503 追従距離制御部
1701 エリア情報検出部
1801 エレベータ
1802 位置
1803 他の人間
1804 発信機
1805 位置
Claims (11)
- 先行移動体を追従する追従移動装置において、
前記先行移動体を検出する先行移動体検出部と、
前記先行移動体検出部により検出された前記先行移動体との追従距離を可変に制御する追従距離制御部と、
を備えて、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従することを特徴とする追従移動装置。 - 周囲状況を検出する周囲状況検出部をさらに備えて、
前記追従距離制御部が、前記周囲状況検出部で検出された前記周囲状況に基づき前記先行移動体との前記距離を可変に制御することを特徴とする請求項1に記載の追従移動装置。 - 前記周囲状況検出部で検出される前記周囲状況は、周囲の障害物の状況であることを特徴とする請求項2に記載の追従移動装置。
- 前記追従距離制御部は、前記周囲の前記障害物との距離が前記追従距離より短い場合に、前記先行移動体との前記追従距離をより短くするように可変に制御することを特徴とする請求項3に記載の追従移動装置。
- 前記追従距離制御部が、ユーザから指示された追従距離に基づき、前記先行移動体との前記追従距離を可変に制御することを特徴とする請求項1〜4のいずれか1つに記載の追従移動装置。
- 前記ユーザから指示された前記追従距離は、前記先行移動体と前記追従移動装置の実際の距離に基づき指示された距離であることを特徴とする請求項5に記載の追従移動装置。
- 前記追従距離制御部が、前記先行移動体の速度に基づいて、前記先行移動体との前記追従距離を可変に制御することを特徴とする請求項1〜6のいずれか1つに記載の追従移動装置。
- 前記追従距離制御部が、前記先行移動体の速度の変化に基づいて、前記先行移動体との前記追従距離を可変に制御することを特徴とする請求項7に記載の追従移動装置。
- 前記追従距離制御部が、前記追従移動装置が移動する空間の位置に応じて、前記先行移動体との前記追従距離を可変に制御することを特徴とする請求項1〜8のいずれか1つに記載の追従移動装置。
- 前記先行移動体を追従するように前記追従移動装置を移動させる駆動部をさらに備え、前記追従距離制御部により制御された前記追従距離に基づき前記先行移動体を追従するように、前記駆動部を駆動して前記先行移動体を追従することを特徴とする請求項1〜9のいずれか1つに記載の追従移動装置。
- 前記周囲状況検出部で検出される前記周囲状況は、前記追従移動装置が移動しようとする場所の状況又はその場所の近傍の状況であることを特徴とする請求項2に記載の追従移動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004324947A JP2006134221A (ja) | 2004-11-09 | 2004-11-09 | 追従移動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004324947A JP2006134221A (ja) | 2004-11-09 | 2004-11-09 | 追従移動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006134221A true JP2006134221A (ja) | 2006-05-25 |
Family
ID=36727690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004324947A Pending JP2006134221A (ja) | 2004-11-09 | 2004-11-09 | 追従移動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006134221A (ja) |
Cited By (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010211512A (ja) * | 2009-03-10 | 2010-09-24 | Toshiba Tec Corp | 自律移動装置 |
| JP2014092861A (ja) * | 2012-11-01 | 2014-05-19 | Symtec Hozumi:Kk | 追従台車システム |
| JP2014092863A (ja) * | 2012-11-01 | 2014-05-19 | Symtec Hozumi:Kk | 追従台車 |
| WO2014156458A1 (ja) * | 2013-03-28 | 2014-10-02 | 株式会社日立産機システム | 自動搬送車、および自動搬送車システム |
| WO2016117204A1 (ja) * | 2015-01-23 | 2016-07-28 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP2016212465A (ja) * | 2015-04-28 | 2016-12-15 | 株式会社ニコン | 電子機器および撮像システム |
| KR101795843B1 (ko) * | 2014-12-23 | 2017-12-04 | 한국해양대학교 산학협력단 | 추종로봇 및 그 제어방법 |
| JP2018085065A (ja) * | 2016-11-25 | 2018-05-31 | 株式会社竹中工務店 | 電動走行台車 |
| JP2018106312A (ja) * | 2016-12-23 | 2018-07-05 | 株式会社Zmp | 移動車両 |
| JP2018116359A (ja) * | 2017-01-16 | 2018-07-26 | 本田技研工業株式会社 | 自律移動型ロボット運行管理システム |
| US10224769B2 (en) | 2013-11-06 | 2019-03-05 | Sony Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| CN109696924A (zh) * | 2019-01-31 | 2019-04-30 | 合肥联宝信息技术有限公司 | 智能行李车及控制系统 |
| WO2019123622A1 (ja) * | 2017-12-21 | 2019-06-27 | 株式会社ニコン | 誘導装置 |
| KR20190134970A (ko) * | 2018-05-04 | 2019-12-05 | 엘지전자 주식회사 | 복수의 이동 로봇 및 그 제어방법 |
| EP3579076A1 (en) | 2018-06-05 | 2019-12-11 | Kabushiki Kaisha Toyota Jidoshokki | Tracking vehicle control system |
| CN111208846A (zh) * | 2018-11-21 | 2020-05-29 | 富士施乐株式会社 | 自主移动装置以及计算机可读介质 |
| WO2020138115A1 (ja) * | 2018-12-27 | 2020-07-02 | 株式会社豊田自動織機 | 自律移動体 |
| JP2021049910A (ja) * | 2019-09-26 | 2021-04-01 | ダイムラー・アクチェンゲゼルシャフトDaimler AG | 車両の制御システム、及び、車両の制御方法 |
| JP2021059217A (ja) * | 2019-10-07 | 2021-04-15 | 株式会社カーメイト | 電動ベビーカー |
| JPWO2020152778A1 (ja) * | 2019-01-22 | 2021-09-30 | 本田技研工業株式会社 | 同行移動体 |
| JPWO2020152777A1 (ja) * | 2019-01-22 | 2021-09-30 | 本田技研工業株式会社 | 同行移動体 |
| US11148290B2 (en) | 2018-05-04 | 2021-10-19 | Lg Electronics Inc. | Plurality of robot cleaner and a controlling method for the same |
| JPWO2020170510A1 (ja) * | 2019-02-19 | 2021-12-16 | パナソニックIpマネジメント株式会社 | 無人飛行体、情報処理方法およびプログラム |
| JP2022525041A (ja) * | 2018-03-07 | 2022-05-11 | スカイラ テクノロジーズ, インク. | 人間とロボット車両との協働タスク実行 |
| CN114803588A (zh) * | 2022-04-18 | 2022-07-29 | 珠海舒墨科技有限公司 | 自动调整轨道宽度的传输装置 |
| WO2023140509A1 (ko) * | 2022-01-19 | 2023-07-27 | 주식회사 트위니 | 사람 추종 물류 운송 로봇 |
| JP2023537164A (ja) * | 2020-01-17 | 2023-08-31 | ジメノ、インコーポレイテッド ディービーエイ モナーク トラクター | 遠隔操作者による車両制御 |
| WO2023187859A1 (ja) * | 2022-03-28 | 2023-10-05 | 三菱電機株式会社 | 自律移動ロボットの動作制御装置及び方法 |
| JP2023151163A (ja) * | 2022-03-31 | 2023-10-16 | 本田技研工業株式会社 | 移動体の制御装置、移動体の制御方法、プログラム及び記憶媒体 |
| CN117621035A (zh) * | 2022-08-17 | 2024-03-01 | 北京小米机器人技术有限公司 | 机器人控制方法、装置、机器人和存储介质 |
| CN119512136A (zh) * | 2024-10-15 | 2025-02-25 | 中国直升机设计研究所 | 一种无人直升机目标跟踪的控制方法 |
| WO2025177808A1 (ja) * | 2024-02-19 | 2025-08-28 | ソニーグループ株式会社 | 制御装置および制御方法並びにロボット |
| WO2026069624A1 (ja) * | 2024-09-27 | 2026-04-02 | 本田技研工業株式会社 | 移動体、その制御装置及び制御方法、プログラム並びにシステム |
-
2004
- 2004-11-09 JP JP2004324947A patent/JP2006134221A/ja active Pending
Cited By (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010211512A (ja) * | 2009-03-10 | 2010-09-24 | Toshiba Tec Corp | 自律移動装置 |
| JP2014092861A (ja) * | 2012-11-01 | 2014-05-19 | Symtec Hozumi:Kk | 追従台車システム |
| JP2014092863A (ja) * | 2012-11-01 | 2014-05-19 | Symtec Hozumi:Kk | 追従台車 |
| WO2014156458A1 (ja) * | 2013-03-28 | 2014-10-02 | 株式会社日立産機システム | 自動搬送車、および自動搬送車システム |
| JP2014191786A (ja) * | 2013-03-28 | 2014-10-06 | Hitachi Industrial Equipment Systems Co Ltd | 自動搬送車、および自動搬送車システム |
| CN105074601A (zh) * | 2013-03-28 | 2015-11-18 | 株式会社日立产机系统 | 自动输送车和自动输送车系统 |
| CN105074601B (zh) * | 2013-03-28 | 2017-09-01 | 株式会社日立产机系统 | 自动输送车和自动输送车系统 |
| US11031833B2 (en) | 2013-11-06 | 2021-06-08 | Sony Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US10224769B2 (en) | 2013-11-06 | 2019-03-05 | Sony Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| US11689070B2 (en) | 2013-11-06 | 2023-06-27 | Sony Group Corporation | Solid-state imaging device, method of manufacturing solid-state imaging device, and electronic apparatus |
| KR101795843B1 (ko) * | 2014-12-23 | 2017-12-04 | 한국해양대학교 산학협력단 | 추종로봇 및 그 제어방법 |
| US11385641B2 (en) | 2015-01-23 | 2022-07-12 | Sony Corporation | Information processing device and information processing method |
| US10509401B2 (en) | 2015-01-23 | 2019-12-17 | Sony Corporation | Information processing device and information processing method |
| WO2016117204A1 (ja) * | 2015-01-23 | 2016-07-28 | ソニー株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP2016212465A (ja) * | 2015-04-28 | 2016-12-15 | 株式会社ニコン | 電子機器および撮像システム |
| JP2018085065A (ja) * | 2016-11-25 | 2018-05-31 | 株式会社竹中工務店 | 電動走行台車 |
| JP2018106312A (ja) * | 2016-12-23 | 2018-07-05 | 株式会社Zmp | 移動車両 |
| JP2018116359A (ja) * | 2017-01-16 | 2018-07-26 | 本田技研工業株式会社 | 自律移動型ロボット運行管理システム |
| WO2019123622A1 (ja) * | 2017-12-21 | 2019-06-27 | 株式会社ニコン | 誘導装置 |
| JP2022525041A (ja) * | 2018-03-07 | 2022-05-11 | スカイラ テクノロジーズ, インク. | 人間とロボット車両との協働タスク実行 |
| KR20190134970A (ko) * | 2018-05-04 | 2019-12-05 | 엘지전자 주식회사 | 복수의 이동 로봇 및 그 제어방법 |
| US11148290B2 (en) | 2018-05-04 | 2021-10-19 | Lg Electronics Inc. | Plurality of robot cleaner and a controlling method for the same |
| KR102067603B1 (ko) | 2018-05-04 | 2020-01-17 | 엘지전자 주식회사 | 복수의 이동 로봇 및 그 제어방법 |
| JP7119599B2 (ja) | 2018-06-05 | 2022-08-17 | 株式会社豊田自動織機 | 追尾車制御装置 |
| US11209829B2 (en) | 2018-06-05 | 2021-12-28 | Kabushiki Kaisha Toyota Jidoshokki | Tracking vehicle control system |
| JP2019212008A (ja) * | 2018-06-05 | 2019-12-12 | 株式会社豊田自動織機 | 追尾車制御装置 |
| EP3579076A1 (en) | 2018-06-05 | 2019-12-11 | Kabushiki Kaisha Toyota Jidoshokki | Tracking vehicle control system |
| CN111208846A (zh) * | 2018-11-21 | 2020-05-29 | 富士施乐株式会社 | 自主移动装置以及计算机可读介质 |
| JP2020107116A (ja) * | 2018-12-27 | 2020-07-09 | 株式会社豊田自動織機 | 自律移動体 |
| WO2020138115A1 (ja) * | 2018-12-27 | 2020-07-02 | 株式会社豊田自動織機 | 自律移動体 |
| JPWO2020152778A1 (ja) * | 2019-01-22 | 2021-09-30 | 本田技研工業株式会社 | 同行移動体 |
| JPWO2020152777A1 (ja) * | 2019-01-22 | 2021-09-30 | 本田技研工業株式会社 | 同行移動体 |
| JP7116806B2 (ja) | 2019-01-22 | 2022-08-10 | 本田技研工業株式会社 | 同行移動体 |
| JP7391882B2 (ja) | 2019-01-22 | 2023-12-05 | 本田技研工業株式会社 | 同行移動体 |
| CN109696924A (zh) * | 2019-01-31 | 2019-04-30 | 合肥联宝信息技术有限公司 | 智能行李车及控制系统 |
| CN109696924B (zh) * | 2019-01-31 | 2024-04-26 | 合肥联宝信息技术有限公司 | 智能行李车及控制系统 |
| US11928974B2 (en) | 2019-02-19 | 2024-03-12 | Panasonic Intellectual Property Management Co., Ltd. | Unmanned aircraft, information processing method, and recording medium |
| JPWO2020170510A1 (ja) * | 2019-02-19 | 2021-12-16 | パナソニックIpマネジメント株式会社 | 無人飛行体、情報処理方法およびプログラム |
| JP7336935B2 (ja) | 2019-09-26 | 2023-09-01 | ダイムラー トラック エージー | 車両の制御システム、及び、車両の制御方法 |
| JP2021049910A (ja) * | 2019-09-26 | 2021-04-01 | ダイムラー・アクチェンゲゼルシャフトDaimler AG | 車両の制御システム、及び、車両の制御方法 |
| JP7295771B2 (ja) | 2019-10-07 | 2023-06-21 | 株式会社カーメイト | 電動ベビーカー |
| JP2021059217A (ja) * | 2019-10-07 | 2021-04-15 | 株式会社カーメイト | 電動ベビーカー |
| JP2023537164A (ja) * | 2020-01-17 | 2023-08-31 | ジメノ、インコーポレイテッド ディービーエイ モナーク トラクター | 遠隔操作者による車両制御 |
| WO2023140509A1 (ko) * | 2022-01-19 | 2023-07-27 | 주식회사 트위니 | 사람 추종 물류 운송 로봇 |
| WO2023187859A1 (ja) * | 2022-03-28 | 2023-10-05 | 三菱電機株式会社 | 自律移動ロボットの動作制御装置及び方法 |
| JP7400998B1 (ja) * | 2022-03-28 | 2023-12-19 | 三菱電機株式会社 | 自律移動ロボットの動作制御装置及び方法 |
| JP2023151163A (ja) * | 2022-03-31 | 2023-10-16 | 本田技研工業株式会社 | 移動体の制御装置、移動体の制御方法、プログラム及び記憶媒体 |
| CN114803588A (zh) * | 2022-04-18 | 2022-07-29 | 珠海舒墨科技有限公司 | 自动调整轨道宽度的传输装置 |
| CN117621035A (zh) * | 2022-08-17 | 2024-03-01 | 北京小米机器人技术有限公司 | 机器人控制方法、装置、机器人和存储介质 |
| WO2025177808A1 (ja) * | 2024-02-19 | 2025-08-28 | ソニーグループ株式会社 | 制御装置および制御方法並びにロボット |
| WO2026069624A1 (ja) * | 2024-09-27 | 2026-04-02 | 本田技研工業株式会社 | 移動体、その制御装置及び制御方法、プログラム並びにシステム |
| CN119512136A (zh) * | 2024-10-15 | 2025-02-25 | 中国直升机设计研究所 | 一种无人直升机目标跟踪的控制方法 |
| CN119512136B (zh) * | 2024-10-15 | 2025-12-16 | 中国直升机设计研究所 | 一种无人直升机目标跟踪的控制方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006134221A (ja) | 追従移動装置 | |
| US12434743B2 (en) | Autonomous driving vehicle system | |
| US11731630B2 (en) | Methods and systems for asserting right of way for traversing an intersection | |
| CN101971116B (zh) | 自动移动体及其控制方法、以及控制系统 | |
| JP5160322B2 (ja) | 自律移動ロボット装置及び自律移動ロボット装置の制御方法 | |
| JP5112666B2 (ja) | 移動装置 | |
| US20220340138A1 (en) | Methods and systems for generating trajectory of an autonomous vehicle for traversing an intersection | |
| CN109643128B (zh) | 移动体及移动体的控制方法 | |
| EP3915068B1 (en) | Pick-up/drop-off zone handoff | |
| JP7798629B2 (ja) | 移動体の制御装置、移動体の制御方法、移動体、情報処理方法及びプログラム | |
| WO2021200680A1 (ja) | リモート駐車システムおよびそれに用いられる駐車支援制御装置 | |
| JP7641799B2 (ja) | 情報処理装置、移動体の制御装置、情報処理装置の制御方法、移動体の制御方法、及びプログラム | |
| JP4552869B2 (ja) | 移動体の追従方法 | |
| JP7825035B2 (ja) | 移動体の制御装置、移動体の制御方法、移動体、情報処理方法及びプログラム | |
| JP7272257B2 (ja) | 車両制御装置 | |
| CN115893125B (zh) | 机器人进电梯的控制方法、控制装置和机器人 | |
| WO2024194940A1 (ja) | 制御装置、制御方法、およびプログラム | |
| JP2009223632A (ja) | 自律移動装置、及び、自律移動装置システム | |
| US20260093271A1 (en) | System and method for controlling mobile body, and medium | |
| US20260091497A1 (en) | System and method for predicting movement of person, and medium | |
| WO2025203310A1 (ja) | 制御装置、制御方法、およびプログラム | |
| WO2025191786A1 (ja) | 制御装置、制御方法、およびプログラム | |
| WO2025120847A1 (ja) | 制御装置、制御方法、およびプログラム | |
| WO2025203272A1 (ja) | 制御装置、制御方法、およびプログラム | |
| WO2025203297A1 (ja) | 制御装置、制御方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20061206 |