JP2006146376A - 自立移動ロボット及び移動不能領域検出方法 - Google Patents
自立移動ロボット及び移動不能領域検出方法 Download PDFInfo
- Publication number
- JP2006146376A JP2006146376A JP2004332561A JP2004332561A JP2006146376A JP 2006146376 A JP2006146376 A JP 2006146376A JP 2004332561 A JP2004332561 A JP 2004332561A JP 2004332561 A JP2004332561 A JP 2004332561A JP 2006146376 A JP2006146376 A JP 2006146376A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- moving
- floor surface
- moving body
- mobile robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【課題】 自律移動ロボットにおいて、走行経路の前方に段差や傾斜を検知した場合に、段差の高さや幅又は傾斜の程度を認識することで必要以上の停止をすることがなく、低い段差や狭い幅の溝を走行可能と判断して走行を継続することができるようにする。
【解決手段】 移動台車1の前方床面と移動本体との距離を測定する距離センサ4と、移動台車1に移動量測定手段9を設け、前方床面6及び移動台車1間の測定距離と設定値との偏差が継続して基準量を超えた場合に、移動量測定手段9によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に走行不能と判定して移動台車1を停止させるように構成する。
【選択図】 図1
【解決手段】 移動台車1の前方床面と移動本体との距離を測定する距離センサ4と、移動台車1に移動量測定手段9を設け、前方床面6及び移動台車1間の測定距離と設定値との偏差が継続して基準量を超えた場合に、移動量測定手段9によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に走行不能と判定して移動台車1を停止させるように構成する。
【選択図】 図1
Description
本発明は、自律移動しながら所定の作業領域で作業を行う自律移動ロボットにおいて、前方の床面に段差あるいは傾斜を検知した場合、即座に停止あるいは回避するのではなく、検知後一定距離だけ計測を続けた後走行可能かどうかを判断できるようにした自律移動ロボット、及び同自律移動ロボットによる移動不能領域検出方法に関する。
従来この種のロボットは、自律移動しながら清掃作業を行うロボット等が知られている。その作業領域内に段差あるいは傾斜等が存在する場合には、その段差等による衝突、落下などを防止する必要がある。
特許文献1(特開昭62−162112号公報)には、作業領域内に段差が存在する場合に、移動ロボットの上部前面から前方移動面までの距離を斜めに測定し、その測定距離により事前に段差を検出して、安全に段差の手前で停止することにより、段差への衝突あるいは落下を防止する手法が開示されている。
特許文献1(特開昭62−162112号公報)には、作業領域内に段差が存在する場合に、移動ロボットの上部前面から前方移動面までの距離を斜めに測定し、その測定距離により事前に段差を検出して、安全に段差の手前で停止することにより、段差への衝突あるいは落下を防止する手法が開示されている。
また特許文献2(特開2004−139264号公報)には、移動装置本体に前方床面に向けて光ビームを斜めに照射する照射手段と、床面からの反射光を受光する受光手段とを設け、この受光手段で受光した反射光に基づいて得られる床面と移動装置本体との距離と予め設定された床面と本体との距離とから床面の段差を検出し、この検出した段差に沿って移動装置本体を走行させるようにすることにより、段差への衝突あるいは落下を回避する自律移動ロボットが開示されている。
しかしながら特許文献1及び2に開示された手法では、移動本体が段差前に達した際に、段差の幅を検知して停止するアルゴリズムとなっていなかったため、段差の幅としては通過可能であっても直前で移動本体が停止することになる。
このため例えば、自律移動ロボットの使用場所として家庭内を想定した場合、家庭内では床面の凹凸や色変化(絨毯など)、日照の境目などに誤動作して、頻繁に停止動作を繰り返し、実用的な移動を行うことに支障をきたすという問題があった。
このため例えば、自律移動ロボットの使用場所として家庭内を想定した場合、家庭内では床面の凹凸や色変化(絨毯など)、日照の境目などに誤動作して、頻繁に停止動作を繰り返し、実用的な移動を行うことに支障をきたすという問題があった。
本発明は、かかる従来技術の課題に鑑み、走行経路の前方に段差や傾斜を検知した場合に、段差の高さや幅又は傾斜の程度を認識することで必要以上の停止をすることがない自律移動ロボットを提供することを目的とする。
即ち移動本体が走行できる例えば10mm程度の高さの段差や10〜20mm程度の幅の溝を走行可能と判断して走行を継続することができるようにし、また検出値の変化を瞬時に判断する手法を排することにより、誤検出による停止を回避できる自律移動ロボットを提供することを目的とする。
即ち移動本体が走行できる例えば10mm程度の高さの段差や10〜20mm程度の幅の溝を走行可能と判断して走行を継続することができるようにし、また検出値の変化を瞬時に判断する手法を排することにより、誤検出による停止を回避できる自律移動ロボットを提供することを目的とする。
本発明装置の第1の構成は、かかる目的を達成するもので、走行車輪を備えた移動本体に、移動本体前方の床面と移動本体との距離を測定する距離センサを設け、同距離センサで測定した前方床面と移動本体との距離と、予め設定された床面と移動本体との距離とを比較して前方床面の段差又は傾斜を検出する検出手段を備えた自律移動ロボットにおいて、前記移動本体に移動量測定手段を設け、前記検出手段を、前記測定距離と前記設定距離との偏差が継続して基準量を超えた場合に、前記移動量測定手段によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に走行不能と判定して移動本体を停止させるように構成したことを特徴とする。
前記第1の構成においては、移動本体と床面との距離を予め測定し設定距離とする。その後移動本体と床面との距離を移動毎に順次測定し、前記設定距離と比較してその変化量(偏差)が許容される範囲以上になった場合に段差があることを検出する。この段差を検出すると、検出時点からさらに進んで、その進んだ距離が、移動本体と段差との距離(基準移動量)dに対して、大きくなった時に移動本体を停止させるようにする。
これによって検出値を瞬時に判断させることによる誤動作をなくすようにしたものである。
なお本明細書で、「ロボット」とは人間の代わりの働きをする機械、機器類の総称という意味で用いている。
これによって検出値を瞬時に判断させることによる誤動作をなくすようにしたものである。
なお本明細書で、「ロボット」とは人間の代わりの働きをする機械、機器類の総称という意味で用いている。
本発明装置の第2の構成は、走行車輪を備えた移動本体に、移動本体前方の床面と移動本体との距離を測定する距離センサを設け、同距離センサで測定した前方床面と移動本体との距離と、予め設定された床面と移動本体との距離とを比較して前方床面の傾斜を検出する検出手段を備えた自律移動ロボットにおいて、前記移動本体に移動量測定手段を設け、前記検出手段を、前記測定距離と前記設定距離との偏差が継続して基準量を超えた場合に、前記移動量測定手段によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に前記偏差と前記移動距離とから傾斜角度を算出し、同算出値に基づいて移動本体を停止させるか又は走行を継続させるように構成したことを特徴とする。
前記第2の構成においては、前方床面が傾斜面である場合に、床面と移動本体との距離の変化量と、前方床面及び移動本体間の距離に係る前記測定距離と前記設定距離との偏差が継続して基準量を超えた後の移動本体の移動量とから傾斜角度を算出し、同算出値に基づいて移動本体を停止させるか又は走行を継続させるように構成している。このため算出した傾斜角度に応じて移動本体を停止させるか、あるいは走行を継続させるか選択できる。なおこの第2の構成では、傾斜検知の観点から、前方床面及び移動本体間の距離の変化を認識する前記偏差の値を小さく取る必要がある。
また本発明装置の第1又は第2の構成において、好ましくは、前方床面及び移動本体間の前記設定距離において、当該設定距離とその後に測定された測定距離との偏差が前記基準量を超えなければ同測定距離を新たな設定距離とする。
即ち移動本体と床面との距離につき予め測定した距離を設定距離として定めておかずに、最初の移動本体を床面に設置したときに測定したデータ(最初の測定値)を基にし、次に移動して測定したデータ(2番目の測定値)と最初の測定値を比較して、その変化量が許容される範囲の変化量であれば最初の測定値を2番目の測定値に置き換えて次の移動した測定値(3番目の測定値)との比較データとする。
即ち移動本体と床面との距離につき予め測定した距離を設定距離として定めておかずに、最初の移動本体を床面に設置したときに測定したデータ(最初の測定値)を基にし、次に移動して測定したデータ(2番目の測定値)と最初の測定値を比較して、その変化量が許容される範囲の変化量であれば最初の測定値を2番目の測定値に置き換えて次の移動した測定値(3番目の測定値)との比較データとする。
この操作を順次行い、移動が進み、測定値(n番目の測定値)が比較値(n−1番目の測定値)と比較して許容範囲を超えて変化した場合(凹みの段差があれば測定値が比較値より長くなる)段差のあることを認識し、比較値としてn−1番目の測定値を記憶したままで、次に移動し測定した値(n+1番目の測定値)が、n−1番目の測定値と比較して許容範囲を超えていた場合、段差が続いているとの認識で移動を進める。この動作を進めていき、所定の移動を進み移動本体と段差との距離(基準量:移動本体が超えられる段差幅の限界距離)dに対して、大きくなった時に移動本体を停止させるようにする。
また本発明装置の第1又は第2の構成において、好ましくは、距離センサを移動本体に対して測定方向を可動可能に取り付ければ、段差又は傾斜を検知した場合には、距離センサの測定方向をさらに前方まで延ばして、段差又は傾斜が継続して存在しているかどうかを確認して、停止か走行継続かの判断を行うことができる。
また好ましくは、前記距離センサを複数個並設し、前方床面の設定領域を同時測定可能とする。また傾斜面が連続して続いておりその傾斜角度が変化するような場合においては、好ましくは、移動本体に同移動本体の傾斜度を測定するセンサを搭載し、同傾斜センサで測定した移動本体の傾斜角度と前記検出手段によって算出した前方床面の傾斜角度とを積算した傾斜角度に基づいて移動本体を停止させるか又は走行を継続させるように構成する。
また第3の本発明は、前記第1又は第2の構成を有する自律移動ロボットにおいて、前記距離センサとして赤外線センサを用い、移動不能領域の境界を赤外線センサで識別可能な色で表示し、同赤外線センサで前記色を検知することにより移動不能領域を検知することを特徴とする移動不能領域検出方法を提案する。
本発明方法では、赤外線センサの検出特性を活かし、例えば赤外線センサで識別可能な色のテープを移動不能領域の境界に貼ることで、移動本体に識別可能領域の境界を簡単に認識させることができる。
本発明方法では、赤外線センサの検出特性を活かし、例えば赤外線センサで識別可能な色のテープを移動不能領域の境界に貼ることで、移動本体に識別可能領域の境界を簡単に認識させることができる。
本発明装置の第1の構成によれば、移動本体に移動量測定手段を設け、検出手段を、前方床面と移動本体との距離に係る測定距離と設定距離との偏差が継続して基準量を超えた場合に、前記移動量測定手段によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に走行不能と判定して移動本体を停止させるように構成したことにより、移動本体の走行経路上にある段差をその存在のみならず、段差の高さや幅をも認識することができ、これによって自律移動するロボットが走行不可能な領域へ進入することを未然に防止することで転倒や衝突による故障を回避することができるとともに、走行可能な段差や傾斜面であれば、停止することなく、そのまま走行を継続することができ、作業に支障を来たさない利点がある。
またこのように検出値の変化を瞬時に判断して次の動作を決定してしまう手法ではないので、誤動作を未然に防ぐことができる。
またこのように検出値の変化を瞬時に判断して次の動作を決定してしまう手法ではないので、誤動作を未然に防ぐことができる。
また本発明装置の第2の構成によれば、移動本体に移動量測定手段を設け、検出手段を、前方床面と移動本体との距離に係る測定距離と設定距離との偏差が継続して基準量を超えた場合に、前記移動量測定手段によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に前記偏差と前記移動距離とから傾斜角度を算出し、同算出値に基づいて移動本体を停止させるか又は走行を継続させるように構成したことにより、走行経路上に傾斜を検知して即座に停止するのではなく、傾斜の程度によって登坂可能か又はそうでないかを判断し、登坂か又は停止かを選択することができる。
また本発明装置の第1又は第2の構成において、好ましくは、前方床面及び移動本体間の前記設定距離において、当該設定距離とその後に測定された測定距離との偏差が前記基準量を超えなければ同測定距離を新たな設定距離とすることによって、前記設定距離を常に最新情報に基づいて更新していくことにより、移動本体周囲の現状に合った設定値とすることができ、段差又は傾斜有無のより正確な判定が可能となる。
また本発明装置の第1又は第2の構成において、好ましくは、距離センサを移動本体に対して測定方向を可動可能に取り付けることにより、段差又は傾斜面等を検知した場合には、距離センサの測定方向をさらに前方まで延ばして、段差又は傾斜面等が継続して存在しているかどうかを確認して、停止か走行継続かの判断を行うことができる。このため段差又は傾斜に対して安全な距離を十分保って停止か走行継続かの判断を行うことができる。
また本発明装置の第1又は第2の構成において、好ましくは、距離センサを複数個並設し、前方床面の設定領域を同時測定可能としたことにより、複数の距離センサで床面との距離を計測することで同時に進行方向に対して広範囲の床面検出が可能となり、停止か走行継続かの判断がいち早く可能となる。
また本発明装置の第2の構成において、好ましくは、移動本体に同移動本体の傾斜度を測定するセンサを搭載し、同傾斜センサで測定した移動本体の傾斜角度と前記検出手段によって算出した前方床面の傾斜角度とを積算した傾斜角度に基づいて移動本体停止させるか又は走行を継続させるように構成することにより、走行経路上に傾斜面が連続して続き、かつ傾斜角度が変化するような場合において、前方床面の傾斜角度のみならず移動本体自体の傾斜を加味して停止か走行継続かの判断をすることができる。
また本発明の移動不能領域検出方法によれば、前記第1又は第2の構成による自律移動ロボットにおいて、前記距離センサとして赤外線センサを用い、移動不能領域の境界を赤外線センサで識別可能な色で表示し、同赤外線センサで前記色を検知することにより移動不能領域を検知するため、大掛かりな壁や柵ではなく、例えば赤外線センサで識別可能な色のテープを移動不能領域の境界に貼ることで、移動本体に識別可能領域の境界を簡単に認識させることができる利点を有する。
以下、本発明を図に示した実施例を用いて詳細に説明する。但し、この実施例に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではなく、単なる説明例にすぎない。
図1(a)は、本発明の自律移動ロボットを段差部を検出する場合に適用した第1実施例を示す立面模式図、(b)は、赤外線センサ4で検出した移動台車1及び床面6間の距離と時間t(ms)との関係を示す線図、(c)は、移動量測定装置9により測定した、段差部7検出後の移動台車1の移動距離と時間t(sm)との関係を示す線図、図2は本第1実施例における制御系を示すブロック線図、図3は本第1実施例における制御系の作動手順を示すフローチャートである。
図1(a)は、本発明の自律移動ロボットを段差部を検出する場合に適用した第1実施例を示す立面模式図、(b)は、赤外線センサ4で検出した移動台車1及び床面6間の距離と時間t(ms)との関係を示す線図、(c)は、移動量測定装置9により測定した、段差部7検出後の移動台車1の移動距離と時間t(sm)との関係を示す線図、図2は本第1実施例における制御系を示すブロック線図、図3は本第1実施例における制御系の作動手順を示すフローチャートである。
本発明の第1実施例を示す図1(a)において、1は移動台車であり、後輪2及び前輪3を備え、また前部に移動台車から床面6までの距離を測定する赤外線センサ4を備えている。赤外線センサ4は前方床面6に対して赤外線5を斜めに照射してその反射ビームを受信することにより前方床面6までの距離を測定する。なお図1(a)においては、移動台車の移動段階に応じてa,b,cの符号を付している。これは図4、図7、図8及び図10においても同様である。
図2は、移動台車1の制御系を示し、図2において、9は、移動台車1が段差部7を検知した後の移動台車1の移動量を測定する移動量測定装置であり、本実施例ではオドメトリを使用している。なお他の測定手段として、後輪2又は前輪3にエンコーダを取り付けて、車輪の回転数から移動量を測定してもよい。検出装置8は、赤外線センサ4から移動台車1及び床面6間の距離の測定値を入力し、また移動量測定装置9から移動台車1が段差部7を検知した後の移動量の測定値を入力して、車輪を駆動する装置10に停止又は走行継続の指令を出す。
図3は、検出装置8による制御系の作動手順を示し、図3において、移動台車1の走行が開始されると、図1(a)において移動台車が1aの位置にいるときは、赤外線センサ4aによる赤外線照射位置5aにおける床面までの距離は設定値と同一であるため、検出装置8はまだ段差部7を認識しない。
移動台車が1bの位置に来たとき、赤外線センサの照射位置が5bとなり、このとき段差部7の存在により床面までの距離が垂直方向換算値でΔhだけ長くなる。この偏差Δhが絶対値で所定の基準量を越えたときに、検出装置8が段差部7の存在を認識する(ステップ1)。
移動台車が1bの位置に来たとき、赤外線センサの照射位置が5bとなり、このとき段差部7の存在により床面までの距離が垂直方向換算値でΔhだけ長くなる。この偏差Δhが絶対値で所定の基準量を越えたときに、検出装置8が段差部7の存在を認識する(ステップ1)。
次いで検出装置8が段差部7を認識した時の移動台車1と段差部7との距離をlとすると、検出装置8が段差部7を認識した後の移動台車1の移動量を移動量測定装置9で測定し、移動台車1が1cの位置に到達してその測定値が所定の基準移動量d(<l)を超えた時に、検出装置8が車輪駆動装置10に停止の指令を出力する(ステップ2)。
なお図1の(b)及び(c)において、横軸は時間t(ms)を示し、×印は測定ポイントを示す。
なお図1の(b)及び(c)において、横軸は時間t(ms)を示し、×印は測定ポイントを示す。
このように本第1実施例の装置によれば、移動台車1の走行経路上にある段差部7をその存在のみならず、段差の高さや幅を認識することができ、これによって走行不可能な段差であれば、停止又は回避し、走行可能な段差であれば、停止することなく、そのまま走行を継続することができ、作業に支障を来たさない利点がある。
また検出値の変化を瞬時に判断して次の動作を決定してしまう手法ではないので、誤動作を未然に防ぐことができる。
また検出値の変化を瞬時に判断して次の動作を決定してしまう手法ではないので、誤動作を未然に防ぐことができる。
次に本発明の自律移動ロボットを傾斜面を検出する場合に適用した第2実施例を図面に基づいて説明する。図4の(a)は、本実施例を示す立面模式図、(b)は、赤外線センサ4で検出した移動台車1及び床面6間の距離と時間t(ms)との関係を示す線図、(c)は、移動量測定装置9により測定した、段差部7検出後の移動台車1の移動距離と時間t(ms)との関係を示す線図である。図4において、移動台車1の構成及びその制御系の構成は、前記第1実施例と同一であるが、制御系の作動手順は、図5に示すフローチャートに沿って作動する。
図4(a)において移動台車が1aの位置にいるときは、赤外線センサ4aによる赤外線照射位置5aにおける床面までの距離は設定値と同一であるため、検出装置8はまだ傾斜のある床面(傾斜面)11を認識しない。
移動台車が1bの位置に来たとき、赤外線センサ4の照射位置が5bとなり、このとき傾斜面11の存在により床面までの距離の測定値に変化が生じ、その変化量が所定の基準量を越えた時に検出装置8が傾斜面11の存在を認識する(ステップ1)。なお傾斜面を検知する場合は前記設定値を小さくする必要がある。
移動台車が1bの位置に来たとき、赤外線センサ4の照射位置が5bとなり、このとき傾斜面11の存在により床面までの距離の測定値に変化が生じ、その変化量が所定の基準量を越えた時に検出装置8が傾斜面11の存在を認識する(ステップ1)。なお傾斜面を検知する場合は前記設定値を小さくする必要がある。
次いで検出装置8が傾斜面11を認識した時の移動台車1bと傾斜面開始点との距離をlとすると、検出装置8が傾斜面11を認識した後の移動台車の移動量を移動量測定装置9で測定し、移動台車が1cの位置に到達して移動量測定値が所定の基準移動量d(<l)を超えたかどうかを判定する(ステップ2)。次に移動量dと移動量dに対する高さの検出値の偏差Δhとから傾斜角度θを算出し、移動台車1の登坂可能な傾斜であれば、検出装置8が車輪駆動装置10に走行継続の指令を出力し、登坂不可能な傾斜であれば、停止の指令を出力する(ステップ3)。
本第2実施例によれば、走行経路上に傾斜を検知した場合、即座に停止するのではなく、傾斜の程度によって登坂可能か又はそうでないかを判断し、登坂か又は停止かを選択することができる。
本第2実施例によれば、走行経路上に傾斜を検知した場合、即座に停止するのではなく、傾斜の程度によって登坂可能か又はそうでないかを判断し、登坂か又は停止かを選択することができる。
次に本発明の第3実施例を図面に基づいて説明する。図6は本実施例における制御系の作動手順を示すフローチャートである。
本実施例の装置構成は前記第1実施例又は前記第2実施例と同一であるので、前記第1実施例の装置構成を示す図1、2及び図6に基づいて本実施例を説明する。図1(a)において,移動台車が1aの位置にいるとき、赤外線センサ4aから測定した移動台車1a及び床面6間の距離を設定値として保持する。移動台車が1bの位置の来るまでは移動台車1a及び床面6間の距離の検出値と設定値との偏差は基準量の範囲内であるので、段差を認識せず、新しい検出値を従来の設定値と入れ替える(ステップ1)。検出値と設定値との偏差が基準量より小さければ、この処理を繰り返す。
本実施例の装置構成は前記第1実施例又は前記第2実施例と同一であるので、前記第1実施例の装置構成を示す図1、2及び図6に基づいて本実施例を説明する。図1(a)において,移動台車が1aの位置にいるとき、赤外線センサ4aから測定した移動台車1a及び床面6間の距離を設定値として保持する。移動台車が1bの位置の来るまでは移動台車1a及び床面6間の距離の検出値と設定値との偏差は基準量の範囲内であるので、段差を認識せず、新しい検出値を従来の設定値と入れ替える(ステップ1)。検出値と設定値との偏差が基準量より小さければ、この処理を繰り返す。
次に移動台車1aが1bまで進んだ時、赤外線センサ4bの照射位置が5bとなり、このとき段差部7の存在により、床面までの距離が垂直方向換算値でΔhだけ長くなる。偏差Δhが絶対値で所定の基準量を越えたときに、検出装置8が段差部7の存在を認識し、従来の設定値を検出値と入れ替えずにそのまま保持する。
次いでその後移動台車及び床面間の距離を測定し、偏差Δhが基準量を超えたままかどうか、即ち段差が継続しているかどうかを検知し続け(ステップ2)、基準値より超えたままであると、段差を検出してからの移動距離が加算されていく。検出装置8が段差部7を認識した時の移動台車1と段差部7との距離をlとすると、検出装置8が段差部7を認識した後の移動台車1の移動量を移動量測定装置9で測定し、移動台車1が1cの位置に到達してその移動量が所定の基準移動量d(<l)を超えた時に、危険と判断して、検出装置8が車輪駆動装置10に停止の指令を出力する(ステップ3)。
この第3実施例によれば、移動台車1及び床面6間の設定距離を常に最新情報に基づいて更新していくことにより、移動本体周囲の現状に合った設定値とすることができ、段差又は傾斜有無のさらに正確な判定が可能となる。
次に本発明の第4実施例を図面に基づいて説明する。図7の(a)及び(b)は本実施例の立面模式図、(c)は移動台車1から床面6までの距離検出値を示す線図である。図7に示すように、本実施例は、前方床面6と移動台車1との距離を測定する距離センサ14を測定方向を可動可能に移動台車1に取り付けたものである。距離センサ14は、移動台車1に対する取付け部にチルト機構を設け、上下方向の首振り動作を可能にしている。
本実施例の装置においては、図7(a)に示すように、段差部7を検出したら停止し、(b)に示すように、距離センサ14を上下方向に首振りさせ、段差周辺の性状を検出する。このように停止して周辺の性状を検出し、(c)の線図に示すように段差部7周辺の検出距離データをプロットして、床面の段差部7の偏差Δhを認識する。これによって瞬間的な誤動作を排除することができる。
次に本発明の第5実施例を図8に基づいて説明する。図8の(a)は本実施例の立面模式図、(b)は移動台車1から床面6までの距離検出値を示す線図、(c)及び(d)は移動台車1がさらに段差部7に近づいたときの立面模式図及び同距離検出値を示す線図である。本実施例は、複数の距離センサからなる距離センサ群24(図示では3個)を移動台車1の走行に向かって並設したものである。図8の(a)では、距離センサ群24bの一部センサが段差部7を検出しているが、この時点ではまだ段差部7が段差として認識されるに至っていない。(c)の状態で段差と考えられる床面が継続して認識されて初めて段差部7による偏差Δhが検出され、段差として認識される。
本実施例の装置によれば、複数の距離センサ群24で段差部7を検出することにより、進行方向に対して同時に広範囲の床面検出が可能となり、停止か走行継続かの判断を迅速に行なうことができる。
図9は、移動本体と床面との距離を測定する距離センサを移動本体に取り付ける場合の留意点を説明したものである。図9において、34は距離センサで、35は発光側(LED)、36は受光側(PSD)である。距離センサ34を移動本体に取り付ける際には、図示にように、受光側36を下側に設置すると、下向き段差を検出するとき、段差部7が陰になり、受光側36に反射光が帰らないという不具合が生じる。このためAの領域で誤検出が生じる。
従って発光側35と受講側36とが並列に配列されるように設置するか、縦置き以外が不可能な場合には、受光側36が上側に、発光側35が下側となるように配設する必要がある。
従って発光側35と受講側36とが並列に配列されるように設置するか、縦置き以外が不可能な場合には、受光側36が上側に、発光側35が下側となるように配設する必要がある。
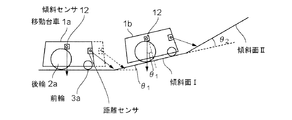
次に本発明の第6実施例を図10に基づいて説明する。図10は、本実施例の立面模式図であり、図10において、本発明の移動台車1は傾斜センサ12を搭載しており、移動台車1が上向きの最初の傾斜面Iにさしかかったときに、傾斜角度θ1を有する傾斜面Iは走行可能と判断して走行を継続し、次に傾斜角度θ2を有する第2の傾斜面IIにさしかかったときに、移動台車1は移動台車自体の傾斜を計測できる傾斜センサ12を搭載しているため、傾斜面IIを走行可能かどうかを判定するに際しては、移動台車1自体の傾斜角度θ1と傾斜面IIの傾斜角度θ2とを積算した傾斜角度(θ1+θ2)に対して走行可能かを判定することができる。
次に移動不能領域検出方法に係る本発明の第7実施例を図11に基づいて説明する。図11(a)において、41は、一般家屋内に置かれた、本発明の構成を有する自律移動ロボットであり、42は室内のフローリング床である。フローリング床42には、危険物としてストーブ43が置かれてあり、その周囲に移動不能領域の境界を示すものとして黒テープ44が貼られている。移動ロボット41がストーブ43に近づいたとき、移動ロボット41に設置されている図示しない赤外線センサが黒テープ44を検知する。赤外線センサの特性として照射している対象物の色が変化したとき、検出距離が変動する特性がある。
従ってフローリング床上に黒い面があると、凸面と認識する応答が得られるため、赤外線センサによる検出距離曲線は、黒いテープの貼付箇所で変化し、図10(b)のようになる。
本実施例は、この特性を利用してロボット41に進入させたくない領域に赤外線センサで検知可能な色のテープを貼ることにより、結界の役割として代用できる。
本実施例は、この特性を利用してロボット41に進入させたくない領域に赤外線センサで検知可能な色のテープを貼ることにより、結界の役割として代用できる。
本発明によれば、自律移動しながら所定の作業領域で作業を行う自律移動ロボットにおいて、段差あるいは傾斜等その他自律移動ロボットが走行不能な領域に進入することを未然に防止することができて、転倒や衝突による故障を回避することができる。
1a,1b,1c 移動台車
2a,2b,2c 後輪
3a,3b,3c 前輪
4,4a,4c 赤外線センサ
5a,5b,5c 赤外線
6 床面
7 段差部
8 検出装置
9 移動量測定装置
10 車輪駆動装置
11,I,II 傾斜面
12 傾斜センサ
14a,14b,34 距離センサ
24a,24b 距離センサ群
35 発光側(LED)
36 受光側(PSD)
41 自律移動ロボット
42 フローリング床
43 ストーブ
44 黒テープ
2a,2b,2c 後輪
3a,3b,3c 前輪
4,4a,4c 赤外線センサ
5a,5b,5c 赤外線
6 床面
7 段差部
8 検出装置
9 移動量測定装置
10 車輪駆動装置
11,I,II 傾斜面
12 傾斜センサ
14a,14b,34 距離センサ
24a,24b 距離センサ群
35 発光側(LED)
36 受光側(PSD)
41 自律移動ロボット
42 フローリング床
43 ストーブ
44 黒テープ
Claims (7)
- 走行車輪を備えた移動本体に、移動本体前方の床面と移動本体との距離を測定する距離センサを設け、同距離センサで測定した前方床面と移動本体との距離と、予め設定された床面と移動本体との距離とを比較して前方床面の段差を検出する検出手段を備えた自律移動ロボットにおいて、前記移動本体に移動量測定手段を設け、前記検出手段を、前記測定距離と前記設定距離との偏差が継続して基準量を超えた場合に、前記移動量測定手段によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に走行不能と判定して移動本体を停止させるように構成したことを特徴とする自律移動ロボット。
- 走行車輪を備えた移動本体に、移動本体前方の床面と移動本体との距離を測定する距離センサを設け、同距離センサで測定した前方床面と移動本体との距離と、予め設定された床面と移動本体との距離とを比較して前方床面の傾斜を検出する検出手段を備えた自律移動ロボットにおいて、前記移動本体に移動量測定手段を設け、前記検出手段を、前記測定距離と前記設定距離との偏差が継続して基準量を超えた場合に、前記移動量測定手段によって同基準量を超えた後の移動距離を測定し、当該移動距離が基準移動量を超えた時に前記偏差と前記移動距離とから傾斜角度を算出し、同算出値に基づいて移動本体を停止させるか又は走行を継続させるように構成したことを特徴とする自律移動ロボット。
- 前記設定距離において、当該設定距離とその後に測定された測定距離との偏差が前記基準量を超えなければ同測定距離を新たな設定距離とすることを特徴とする請求項1又は2記載の自律移動ロボット。
- 前記距離センサを移動本体に対して測定方向を可動可能に取り付けたことを特徴とする請求項1又は2記載の自立移動ロボット。
- 前記距離センサを複数個並設し、前方床面の設定領域を同時測定可能としたことを特徴とする請求項1又は2記載の自律移動ロボット。
- 移動本体に同移動本体の傾斜度を測定するセンサを搭載し、同傾斜センサで測定した移動本体の傾斜角度と前記検出手段によって算出した前方床面の傾斜角度とを積算した傾斜角度に基づいて移動本体を停止させるか又は走行を継続させるように構成したことを特徴とする請求項2記載の自律移動ロボット。
- 請求項1又は2記載の自律移動ロボットにおいて、前記距離センサとして赤外線センサを用い、移動不能領域の境界を赤外線センサで識別可能な色で表示し、同赤外線センサで前記色を検知することにより移動不能領域を検知することを特徴とする移動不能領域検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004332561A JP2006146376A (ja) | 2004-11-17 | 2004-11-17 | 自立移動ロボット及び移動不能領域検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004332561A JP2006146376A (ja) | 2004-11-17 | 2004-11-17 | 自立移動ロボット及び移動不能領域検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006146376A true JP2006146376A (ja) | 2006-06-08 |
Family
ID=36626007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004332561A Withdrawn JP2006146376A (ja) | 2004-11-17 | 2004-11-17 | 自立移動ロボット及び移動不能領域検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006146376A (ja) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008146617A (ja) * | 2006-12-06 | 2008-06-26 | Samsung Kwangju Electronics Co Ltd | ロボット掃除機システム |
| KR100904769B1 (ko) * | 2008-08-01 | 2009-06-25 | (주)다사로봇 | 진로 방해물 감지 장치 및 방법 |
| JP2010020366A (ja) * | 2008-07-08 | 2010-01-28 | Nissan Motor Co Ltd | 走行境界検出装置及び走行境界検出方法 |
| KR101000332B1 (ko) | 2009-12-31 | 2010-12-13 | 고려대학교 산학협력단 | 주행 가능 도로 검출 방법 및 이를 이용한 야외 주행 로봇 |
| JP2015103227A (ja) * | 2013-11-28 | 2015-06-04 | トヨタ自動車株式会社 | 自律移動体 |
| CN104750105A (zh) * | 2013-12-27 | 2015-07-01 | 科沃斯机器人科技(苏州)有限公司 | 自移动机器人的行走探测控制方法 |
| JP2016016321A (ja) * | 2014-07-10 | 2016-02-01 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 自動走行床掃除機である移動装置 |
| KR20160090350A (ko) * | 2013-11-28 | 2016-07-29 | 도요타지도샤가부시키가이샤 | 자율 이동체 |
| CN105824313A (zh) * | 2016-03-15 | 2016-08-03 | 深圳市华讯方舟科技有限公司 | 障碍物躲避方法及装置 |
| CN105945956A (zh) * | 2016-05-13 | 2016-09-21 | 深圳市华科安测信息技术有限公司 | 医用机器人控制系统及方法 |
| JP2017015601A (ja) * | 2015-07-02 | 2017-01-19 | シャープ株式会社 | 路面検知装置、移動体、路面検知方法、および路面検知プログラム |
| WO2017086131A1 (ja) | 2015-11-19 | 2017-05-26 | アイシン精機株式会社 | 移動体 |
| WO2018014879A1 (zh) * | 2016-07-21 | 2018-01-25 | 苏州宝时得电动工具有限公司 | 自动识别前方物体的自移动设备及其识别方法 |
| JP2018041254A (ja) * | 2016-09-07 | 2018-03-15 | シャープ株式会社 | 自走式掃除機 |
| JP2018041253A (ja) * | 2016-09-07 | 2018-03-15 | シャープ株式会社 | 自走式掃除機 |
| DE102021105187A1 (de) | 2020-03-09 | 2021-09-09 | Honda Motor Co., Ltd. | Wagen, Arbeitsmaschine und Fahrsystem |
| CN113682276A (zh) * | 2021-08-25 | 2021-11-23 | 汤恩智能科技(常熟)有限公司 | 一种悬崖检测方法及终端 |
| JPWO2022085078A1 (ja) * | 2020-10-20 | 2022-04-28 | ||
| JP2023159103A (ja) * | 2019-07-31 | 2023-10-31 | エックス デベロップメント エルエルシー | 移動ロボットセンサ構成 |
| US11866029B2 (en) | 2020-03-31 | 2024-01-09 | Honda Motor Co., Ltd. | Wagon and management device |
| WO2024009803A1 (ja) * | 2022-07-04 | 2024-01-11 | ソニーセミコンダクタソリューションズ株式会社 | システム及びプログラム |
| JP2024075236A (ja) * | 2022-11-22 | 2024-06-03 | 株式会社東芝 | 走行体制御システムおよび走行体制御方法 |
-
2004
- 2004-11-17 JP JP2004332561A patent/JP2006146376A/ja not_active Withdrawn
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008146617A (ja) * | 2006-12-06 | 2008-06-26 | Samsung Kwangju Electronics Co Ltd | ロボット掃除機システム |
| US7787991B2 (en) | 2006-12-06 | 2010-08-31 | Samsung Gwangju Electronics Co., Ltd. | Robot cleaner system and control method thereof |
| JP2010020366A (ja) * | 2008-07-08 | 2010-01-28 | Nissan Motor Co Ltd | 走行境界検出装置及び走行境界検出方法 |
| KR100904769B1 (ko) * | 2008-08-01 | 2009-06-25 | (주)다사로봇 | 진로 방해물 감지 장치 및 방법 |
| KR101000332B1 (ko) | 2009-12-31 | 2010-12-13 | 고려대학교 산학협력단 | 주행 가능 도로 검출 방법 및 이를 이용한 야외 주행 로봇 |
| KR20160090350A (ko) * | 2013-11-28 | 2016-07-29 | 도요타지도샤가부시키가이샤 | 자율 이동체 |
| JP2015103227A (ja) * | 2013-11-28 | 2015-06-04 | トヨタ自動車株式会社 | 自律移動体 |
| CN104750105A (zh) * | 2013-12-27 | 2015-07-01 | 科沃斯机器人科技(苏州)有限公司 | 自移动机器人的行走探测控制方法 |
| WO2015096805A1 (zh) * | 2013-12-27 | 2015-07-02 | 科沃斯机器人有限公司 | 自移动机器人的行走探测控制方法 |
| JP2016016321A (ja) * | 2014-07-10 | 2016-02-01 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 自動走行床掃除機である移動装置 |
| JP2017015601A (ja) * | 2015-07-02 | 2017-01-19 | シャープ株式会社 | 路面検知装置、移動体、路面検知方法、および路面検知プログラム |
| WO2017086131A1 (ja) | 2015-11-19 | 2017-05-26 | アイシン精機株式会社 | 移動体 |
| CN105824313A (zh) * | 2016-03-15 | 2016-08-03 | 深圳市华讯方舟科技有限公司 | 障碍物躲避方法及装置 |
| CN105945956A (zh) * | 2016-05-13 | 2016-09-21 | 深圳市华科安测信息技术有限公司 | 医用机器人控制系统及方法 |
| WO2018014879A1 (zh) * | 2016-07-21 | 2018-01-25 | 苏州宝时得电动工具有限公司 | 自动识别前方物体的自移动设备及其识别方法 |
| US11249490B2 (en) | 2016-07-21 | 2022-02-15 | Positec Power Tools (Suzhou) Co., Ltd. | Self-moving device capable of automatically recognizing an object in front, and recognition method thereof |
| JP2018041253A (ja) * | 2016-09-07 | 2018-03-15 | シャープ株式会社 | 自走式掃除機 |
| JP2018041254A (ja) * | 2016-09-07 | 2018-03-15 | シャープ株式会社 | 自走式掃除機 |
| US12030178B2 (en) | 2019-07-31 | 2024-07-09 | Google Llc | Mobile robot sensor configuration |
| JP2023159103A (ja) * | 2019-07-31 | 2023-10-31 | エックス デベロップメント エルエルシー | 移動ロボットセンサ構成 |
| US11577716B2 (en) | 2020-03-09 | 2023-02-14 | Honda Motor Co., Ltd. | Cart, work machine, and travel system |
| DE102021105187A1 (de) | 2020-03-09 | 2021-09-09 | Honda Motor Co., Ltd. | Wagen, Arbeitsmaschine und Fahrsystem |
| US11866029B2 (en) | 2020-03-31 | 2024-01-09 | Honda Motor Co., Ltd. | Wagon and management device |
| WO2022085078A1 (ja) * | 2020-10-20 | 2022-04-28 | 株式会社Fuji | 自動移動装置及び自動移動装置の制御方法 |
| JPWO2022085078A1 (ja) * | 2020-10-20 | 2022-04-28 | ||
| JP7741811B2 (ja) | 2020-10-20 | 2025-09-18 | 株式会社Fuji | 自動移動装置及び自動移動装置の制御方法 |
| CN113682276B (zh) * | 2021-08-25 | 2022-12-13 | 汤恩智能科技(常熟)有限公司 | 一种悬崖检测方法及终端 |
| CN113682276A (zh) * | 2021-08-25 | 2021-11-23 | 汤恩智能科技(常熟)有限公司 | 一种悬崖检测方法及终端 |
| WO2024009803A1 (ja) * | 2022-07-04 | 2024-01-11 | ソニーセミコンダクタソリューションズ株式会社 | システム及びプログラム |
| JP2024075236A (ja) * | 2022-11-22 | 2024-06-03 | 株式会社東芝 | 走行体制御システムおよび走行体制御方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006146376A (ja) | 自立移動ロボット及び移動不能領域検出方法 | |
| AU2015207833B2 (en) | Steer control maneuvers for materials handling vehicles | |
| US10414640B2 (en) | Forklift | |
| CN107636546B (zh) | 自主移动系统 | |
| US9908527B2 (en) | Multiple zone sensing for materials handling vehicles | |
| CN109279543B (zh) | 一种叉车式agv磁导轨跟踪控制系统及方法 | |
| US8731777B2 (en) | Object tracking and steer maneuvers for materials handling vehicles | |
| US9643650B2 (en) | Lane change control device and control method | |
| CN111231951B (zh) | 一种基于汽车上下坡的盲区检测以及车速控制方法 | |
| JP5498178B2 (ja) | 無人移動体の制御方法及び無人移動体 | |
| EP3225456B1 (en) | Moving body | |
| KR20110098771A (ko) | 물류 취급 차량용 다중 구역 감지 | |
| JP2007193495A (ja) | 移動車両 | |
| CN105607633A (zh) | 一种垛区环境中移动扫描车的自主寻径方法及系统 | |
| CN111613093B (zh) | 一种光学投影辅助停车入库系统及实现方法 | |
| JP6464410B2 (ja) | 障害物判定装置および障害物判定方法 | |
| CN110954911A (zh) | 自动导引车定位装置及定位方法 | |
| JP6070382B2 (ja) | エレベータ装置 | |
| KR20130056655A (ko) | 무인 자율주행 운반차량의 충돌회피 대응방법 | |
| EP3872015A1 (en) | Method and robot for determining a height of an elevator step in an elevator arrangement | |
| KR101257566B1 (ko) | 자동 이송 차량 및 이의 제어 방법 | |
| JP2017226064A (ja) | 障害物判定装置 | |
| AU2014268191B2 (en) | Object tracking and steer maneuvers for materials handling vehicles | |
| JP2009223632A (ja) | 自律移動装置、及び、自律移動装置システム | |
| US20250249877A1 (en) | Control system for a motor vehicle and control method for a motor vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20080205 |