JP2006199268A - 盗難防止装置 - Google Patents
盗難防止装置 Download PDFInfo
- Publication number
- JP2006199268A JP2006199268A JP2005213854A JP2005213854A JP2006199268A JP 2006199268 A JP2006199268 A JP 2006199268A JP 2005213854 A JP2005213854 A JP 2005213854A JP 2005213854 A JP2005213854 A JP 2005213854A JP 2006199268 A JP2006199268 A JP 2006199268A
- Authority
- JP
- Japan
- Prior art keywords
- mode
- warning mode
- theft
- engine
- remote
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000007858 starting material Substances 0.000 claims description 163
- 230000006870 function Effects 0.000 claims description 24
- 230000004044 response Effects 0.000 claims description 17
- 230000007704 transition Effects 0.000 claims description 5
- 238000007562 laser obscuration time method Methods 0.000 claims description 4
- 230000009471 action Effects 0.000 description 22
- 230000000694 effects Effects 0.000 description 21
- 238000000034 method Methods 0.000 description 19
- 230000008569 process Effects 0.000 description 16
- 230000005540 biological transmission Effects 0.000 description 15
- 238000010586 diagram Methods 0.000 description 15
- 238000001514 detection method Methods 0.000 description 12
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- 230000007257 malfunction Effects 0.000 description 7
- 238000004891 communication Methods 0.000 description 6
- 230000004397 blinking Effects 0.000 description 4
- 230000002265 prevention Effects 0.000 description 4
- 238000004880 explosion Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000005012 migration Effects 0.000 description 1
- 238000013508 migration Methods 0.000 description 1
- 230000002688 persistence Effects 0.000 description 1
Images




























Landscapes
- Lock And Its Accessories (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Burglar Alarm Systems (AREA)
Abstract
【課題】アーミング中に遠隔エンジン始動が行われた場合に、セキュリティ性を落とすことなく誤警報を防止することができる盗難防止装置を提供する。
【解決手段】盗難防止装置1のマイコン11は、遠隔始動装置2からラインL1を介して遠隔始動開始信号を受信した場合、動作モードが警戒モードであると、動作モードを無警戒モードに設定し、無警戒モード持続タイマの値Tを15秒にセットする。そして、この15秒の間、車両振動による出力変動が生じないセンサのみによって盗難を検出し、15秒が経過するか、あるいは、遠隔始動装置2から遠隔始動終了信号を受信すると、動作モードを警戒モードに再設定する。
【選択図】図1
【解決手段】盗難防止装置1のマイコン11は、遠隔始動装置2からラインL1を介して遠隔始動開始信号を受信した場合、動作モードが警戒モードであると、動作モードを無警戒モードに設定し、無警戒モード持続タイマの値Tを15秒にセットする。そして、この15秒の間、車両振動による出力変動が生じないセンサのみによって盗難を検出し、15秒が経過するか、あるいは、遠隔始動装置2から遠隔始動終了信号を受信すると、動作モードを警戒モードに再設定する。
【選択図】図1
Description
本発明は、乗員不在中に車両に不正侵入等があった場合にアラームを発生させたり、あるいは所定場所に不正侵入があったことを無線通報する盗難防止装置に関する。
車両用の盗難防止装置は、アーミング(警戒)中に不正なドア開、車室内への侵入、車両の振動、ガラス割れ等の不正侵入を検出するとアラームを発生させたり、あるいは所定場所に不正侵入があったことを無線通報するものであり、現在広く実用化されている。
一方で、送信機により車外からエンジンを始動させる遠隔始動装置も実用化されており、盗難防止装置と遠隔始動装置との両方を搭載した車両において遠隔始動を行う場合、通常、盗難防止装置がアーミング中にエンジン始動が行われる。そうすると、エンジン始動により車両振動が生じ、その振動が盗難防止装置のセンサ(振動センサ等)によって検出されるため、誤警報が生じてしまう。
この問題を解決するために、盗難防止装置がアーミング中に遠隔エンジン始動が行われた場合には盗難防止装置をディスアーム(無警戒)し、エンジンが停止すると再びアーミングする装置が提案されている(例えば、特許文献1参照)。
また、盗難防止装置では、泥棒がアーミングまたはアラーム中に盗難防止装置の電源であるバッテリを切り離して盗難防止装置をディスアーム状態にし、その後バッテリを接続し直して車両を盗難するという被害を防止するために、セキュリティのモードをEEPROM等の不揮発性メモリに記憶しておき、盗難防止装置の起動時にEEPROMの記憶内容がアーミングモードまたはアラームモードになっていれば、アーミング中またはアラーム中に泥棒がバッテリを外して再接続したと判断してアラームを発生するという起動時アラーム機能を備えた装置が多い(例えば、特許文献2参照)。
特開平8−310344号公報
特公平5−55341号公報
上記のように、盗難防止装置と遠隔始動装置との両方を搭載する場合、誤警報を防止するために、盗難防止装置がアーミング中に遠隔エンジン始動が行われた場合には盗難防止装置をディスアーム(無警戒)し、エンジンが停止すると再びアーミングする装置が提案されており、この装置によると、盗難防止装置がアーミング中であっても遠隔エンジン始動が行われるとエンジンが作動している間、盗難防止装置は無警戒状態になるため誤警報が生じることはない。しかしながら、その反面、遠隔エンジン始動が行われると、エンジンが停止するまで無警戒状態が続くためセキュリティ性が劣ってしまうという問題が生じる。
また、起動時アラーム機能を備えた盗難防止装置と遠隔始動装置との両方を搭載した車両において遠隔始動を行う場合、通常、盗難防止装置がアーミング中にエンジン始動が行われる。すると、スタータモータを駆動している間バッテリ電圧が一時的に大きく低下し、スタータモータ駆動終了後に元の状態に回復するため、盗難防止装置が作動を停止するレベルまで電圧が低下すると、前記起動時アラーム機能が働きアラームが発生してしまう。このような現象は、特に、バッテリが弱っている場合に多く見られる。
本発明は、上記の問題に鑑みてなされたもので、盗難防止装置がアーミング中に遠隔エンジン始動が行われた場合にセキュリティ性を落とすことなく誤警報を防止すること、及び、セキュリティ性を落とすことなく起動時アラーム機能を備えた盗難防止装置が遠隔始動時に誤って起動時アラームを発生してしまうことを防止することを目的とする。
上述の目的を達成するため、本発明に係る盗難防止装置(1)は、
遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
また、本発明に係る盗難防止装置(2)は、
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
さらに、本発明に係る盗難防止装置(3)は、盗難防止装置(1)または(2)において、
前記制御手段が、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、直ちに警戒モードに設定することを特徴とし、
本発明に係る盗難防止装置(4)は、盗難防止装置(1)〜(3)のいずれかにおいて、
前記制御手段が、前記無警戒モードから再び警戒モードにするときは、通常の警戒モード移行条件を採用しないことを特徴とする。
前記制御手段が、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、直ちに警戒モードに設定することを特徴とし、
本発明に係る盗難防止装置(4)は、盗難防止装置(1)〜(3)のいずれかにおいて、
前記制御手段が、前記無警戒モードから再び警戒モードにするときは、通常の警戒モード移行条件を採用しないことを特徴とする。
また、本発明に係る盗難防止装置(5)は、盗難防止装置(1)〜(3)のいずれかにおいて、
前記制御手段が前記無警戒モードにするとき、及び/または再び警戒モードにするときは、アンサーバックを行わないことを特徴とし、
本発明に係る盗難防止装置(6)は、盗難防止装置(1)または(2)において、
前記制御手段が、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、直ちにアラームを発生させることを特徴とする。
前記制御手段が前記無警戒モードにするとき、及び/または再び警戒モードにするときは、アンサーバックを行わないことを特徴とし、
本発明に係る盗難防止装置(6)は、盗難防止装置(1)または(2)において、
前記制御手段が、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、直ちにアラームを発生させることを特徴とする。
さらに、本発明に係る盗難防止装置(7)は、盗難防止装置(1)または(2)において、
前記制御手段が、遠隔始動による無警戒モード中であっても、盗難センサにより盗難を検出し、再び警戒モードに設定されたときに、遠隔始動による無警戒モード中に前記盗難センサが盗難を検出していた場合、アラームを発生させることを特徴とし、
本発明に係る盗難防止装置(8)は、盗難防止装置(3)、(6)または(7)において、
前記制御手段が、盗難センサのうち、車両振動により出力を生じるセンサには応答しないことを特徴とする。
前記制御手段が、遠隔始動による無警戒モード中であっても、盗難センサにより盗難を検出し、再び警戒モードに設定されたときに、遠隔始動による無警戒モード中に前記盗難センサが盗難を検出していた場合、アラームを発生させることを特徴とし、
本発明に係る盗難防止装置(8)は、盗難防止装置(3)、(6)または(7)において、
前記制御手段が、盗難センサのうち、車両振動により出力を生じるセンサには応答しないことを特徴とする。
また、本発明に係る盗難防止装置(9)は、
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に前記メモリの記憶内容を強制的に無警戒モードに変更し、エンジン始動完了後に再び前記メモリの記憶内容を警戒モードに設定する制御手段を備えたことを特徴とする。
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に前記メモリの記憶内容を強制的に無警戒モードに変更し、エンジン始動完了後に再び前記メモリの記憶内容を警戒モードに設定する制御手段を備えたことを特徴とする。
さらに、本発明に係る盗難防止装置(10)は、盗難防止装置(1)〜(9)のいずれかにおいて、
前記制御手段が、無警戒モードから警戒モードへの移行を、エンジンが停止してから行うことを特徴とし、
本発明に係る盗難防止装置(11)は、盗難防止装置(1)〜(10)のいずれかにおいて、
警戒モードの間、警戒中であることを報知する報知手段を備え、
当該報知手段が遠隔始動により無警戒モードになった場合は、その間も報知を行うことを特徴とする。
前記制御手段が、無警戒モードから警戒モードへの移行を、エンジンが停止してから行うことを特徴とし、
本発明に係る盗難防止装置(11)は、盗難防止装置(1)〜(10)のいずれかにおいて、
警戒モードの間、警戒中であることを報知する報知手段を備え、
当該報知手段が遠隔始動により無警戒モードになった場合は、その間も報知を行うことを特徴とする。
また、本発明に係る盗難防止装置(12)は、
遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにするとともに、所定の無警戒モード時間経過後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにするとともに、所定の無警戒モード時間経過後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
さらに、本発明に係る盗難防止装置(13)は、
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにするとともに、無警戒モード情報と無警戒モード持続時間情報を前記不揮発性メモリに記憶し、所定の無警戒モード時間経過後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにするとともに、無警戒モード情報と無警戒モード持続時間情報を前記不揮発性メモリに記憶し、所定の無警戒モード時間経過後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
また、本発明に係る盗難防止装置(14)は、
遠隔エンジン始動装置を搭載した車両に設けられるとともに、全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定する盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後、または停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
遠隔エンジン始動装置を搭載した車両に設けられるとともに、全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定する盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後、または停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
さらに、本発明に係る盗難防止装置(15)は、
全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定するとともに、セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が第1警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後またはエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定するとともに、セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が第1警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後またはエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
また、本発明に係る盗難防止装置(16)は、
遠隔エンジン始動装置を搭載した車両に設けられるとともに、全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定する盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
遠隔エンジン始動装置を搭載した車両に設けられるとともに、全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定する盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
さらに、本発明に係る盗難防止装置(17)は、
全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定するとともに、セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が第1警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定するとともに、セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が第1警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする。
また、本発明に係る盗難防止装置(18)は、
遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動装置がスタータモータ駆動信号を出力するとき、該駆動信号出力中は無警戒モードにし、該駆動信号出力終了後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動装置がスタータモータ駆動信号を出力するとき、該駆動信号出力中は無警戒モードにし、該駆動信号出力終了後に再び警戒モードに設定する制御手段を備えたことを特徴とする。
さらに、本発明に係る盗難防止装置(19)は、
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えるとともに、遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動装置がスタータモータ駆動信号を出力するとき、該駆動信号出力中は無警戒モードにし、該駆動信号出力終了後に再び警戒モードに設定する制御手段を備えたことを特徴とし、
本発明に係る盗難防止装置(20)は、盗難防止装置(18)または(19)において、
前記制御手段がイグニッションキーシリンダーにキーが挿入されていない状態でスタータ駆動信号が出力されたとき、遠隔始動装置がスタータモータ駆動信号を出力したと判断することを特徴とする。
セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えるとともに、遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動装置がスタータモータ駆動信号を出力するとき、該駆動信号出力中は無警戒モードにし、該駆動信号出力終了後に再び警戒モードに設定する制御手段を備えたことを特徴とし、
本発明に係る盗難防止装置(20)は、盗難防止装置(18)または(19)において、
前記制御手段がイグニッションキーシリンダーにキーが挿入されていない状態でスタータ駆動信号が出力されたとき、遠隔始動装置がスタータモータ駆動信号を出力したと判断することを特徴とする。
本発明に係る盗難防止装置(1)、(12)、(18)によれば、警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動完了後、または、所定の無警戒モード時間経過後、あるいは、スタータモータ駆動信号出力終了後に再び警戒モードに設定されるので、セキュリティ性を確保しつつ遠隔始動によるセキュリティのアラーム誤動作を防止することができる。
また、本発明に係る盗難防止装置(2)、(9)、(10)、(13)、(19)によれば、警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後、または、所定の無警戒モード時間経過後、あるいは、スタータモータ駆動信号出力終了後に再び警戒モードに設定されるので、セキュリティ性を確保しつつ、遠隔始動によるセキュリティのアラーム誤作動、及び遠隔始動によるバッテリ電圧低下に起因して発生する起動時警報の誤作動を防止することができる。
さらに、本発明に係る盗難防止装置(3)〜(7)によれば、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、再び警戒モードに設定されたとき、あるいは、直ちにアラームが発生されるので、エンジン始動過程中に、例えば、万一泥棒にドアを開けられた場合にも対応することが可能となる。
また、本発明に係る盗難防止装置(8)によれば、盗難センサのうち、車両振動により出力を生じるセンサには応答しないので、エンジン始動による振動によって誤警報が行われるのを防止することができる。
また、本発明に係る盗難防止装置(8)によれば、盗難センサのうち、車両振動により出力を生じるセンサには応答しないので、エンジン始動による振動によって誤警報が行われるのを防止することができる。
また、本発明に係る盗難防止装置(11)によれば、警戒モードの間、警戒中であることを報知する報知手段が、遠隔始動により無警戒モードになった場合は、その間も報知を行うので、盗難行為がなされにくくすることができる。
さらに、本発明に係る盗難防止装置(14)〜(15)によれば、第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後、または停止した後に第1警戒モードに戻されるので、セキュリティ性を確保しつつ、遠隔始動によるセキュリティのアラーム誤作動、及び遠隔始動によるバッテリ電圧低下に起因して発生する起動時警報の誤作動を防止することができる。
また、本発明に係る盗難防止装置(16)〜(17)によれば、第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻されるので、セキュリティ性を確保しつつ、遠隔始動によるセキュリティのアラーム誤作動、及び遠隔始動によるバッテリ電圧低下に起因して発生する起動時警報の誤作動
を防止することができる。
を防止することができる。
さらに、本発明に係る盗難防止装置(20)によれば、イグニッションキーシリンダーにキーが挿入されていない状態でスタータ駆動信号が出力されたとき、遠隔始動装置がスタータモータ駆動信号を出力したと判断するので、特に遠隔始動装置との間で通信を行う必要がなく、構成を簡単にすることができる。
以下、本発明の盗難防止装置の実施例について、図面を用いて説明する。
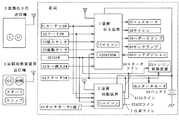
図1は本発明の盗難防止装置を含む全体システムを示すブロック図であり、図に示すように、盗難防止装置1、遠隔始動装置2、盗難防止用送信機3及び遠隔始動装置用送信機4により構成されている。
盗難防止装置1はロック制御を行うキーレスエントリー機能を内蔵しており、車両のドアロック/アンロック制御、ドアの開閉制御を行ったり、不正な手段による車室内への侵入等があったとき警報を発したりするもので、盗難防止用送信機3からの要求信号に応じてアーミング/ディスアーミング制御、車両のドアロック/アンロック制御等を行う。
盗難防止用送信機3はロックボタンLとアンロックボタンUを有し、ロックボタンLの押下によりセキュリティセット(アーミング)、アンロックボタンUの押下によりセキュリティリセット(ディスアーミング)となる。
図1は本発明の盗難防止装置を含む全体システムを示すブロック図であり、図に示すように、盗難防止装置1、遠隔始動装置2、盗難防止用送信機3及び遠隔始動装置用送信機4により構成されている。
盗難防止装置1はロック制御を行うキーレスエントリー機能を内蔵しており、車両のドアロック/アンロック制御、ドアの開閉制御を行ったり、不正な手段による車室内への侵入等があったとき警報を発したりするもので、盗難防止用送信機3からの要求信号に応じてアーミング/ディスアーミング制御、車両のドアロック/アンロック制御等を行う。
盗難防止用送信機3はロックボタンLとアンロックボタンUを有し、ロックボタンLの押下によりセキュリティセット(アーミング)、アンロックボタンUの押下によりセキュリティリセット(ディスアーミング)となる。
また、遠隔始動装置2は遠隔始動装置用送信機4のスタートボタンの押下によりエンジン始動要求信号を受信すると、盗難防止装置1に対してラインL1を介して遠隔始動開始信号を出力した後、IG系ラインのACCライン52にACCオン、IGライン51にIGオン、スタータライン50にSTATオン信号(所定期間)を出力してエンジンを始動させ、ストップボタンの押下によりエンジン停止要求信号を受信すると、IG系ラインのACC、IGをオフにし、エンジンを停止させるとともに、盗難防止装置1に対してラインL1を介して遠隔始動終了信号を出力する。
図1に示した構成では、遠隔始動装置2の送信機4は専用送信機としたが、盗難防止装置1の送信機3を兼用することもできる。送信機を兼用する場合、盗難防止装置1と遠隔始動装置2の両方に送信機のIDを登録しておくか、あるいは、盗難防止装置1から通信ラインを介して遠隔始動装置2にエンジン始動に関する情報を送信するようにするとともに、送信機ボタンの操作の違いにより、あるいは別々のボタンによりロック/アーミングとエンジン始動、アンロック/ディスアーミングとエンジン停止を識別するようにする。
また、盗難防止装置1と遠隔始動装置2とを一体で構成することもでき、一体で構成すれば、送信機は1つですむ。さらに、盗難防止装置1にキーレスエントリー機能を内蔵させないようにすることも可能であり、その場合、送信機ボタンはアーミングボタンとディスアームボタンとなる。
また、盗難防止装置1と遠隔始動装置2とを一体で構成することもでき、一体で構成すれば、送信機は1つですむ。さらに、盗難防止装置1にキーレスエントリー機能を内蔵させないようにすることも可能であり、その場合、送信機ボタンはアーミングボタンとディスアームボタンとなる。
一方、盗難防止装置1には、ドアの開閉状態を検出するカーテシSW31、フードの開閉状態を検出するフードSW32、正規の方法以外でドアが開けられたり、車室内への侵入があったことを検出する侵入センサ33、車両の振動を検出する振動センサ34、イグニッションスイッチのオン/オフのスイッチング状態を検出するIGSW35、ドアのロック、アンロックを検出するロックポジションSW36等のSWやセンサの出力が入力されるとともに、ドアのロック、アンロックを行うドアロック機構を駆動するロックモータ37、警報時に警報動作を行うサイレン38、ハザードランプ39、ダッシュボードに設けられるモニタランプ40等が接続されている。
カーテシSW31は、運転席ドア、助手席ドア、後部ドア、トランクの開閉を検出するものであり、各ドア、トランクに設けられているが、図1では代表として1つだけ示している。また、侵入センサ33は、例えば、車室内に超音波または電波を張りめぐらせておき、ガラスが割られたり、車室内で人が動いたりしたときの音波または電波の周波数の乱れを検出するものであり、振動センサ34は人が車室内へ乗り込んだり、車両をトーイングするために車両を傾けたりしたときの車両の振動を検出する。
この盗難防止装置1はCPU、ROM、RAM等からなるマイコン11、EEPROM12、アンテナ等から構成され、マイコン11は盗難防止装置1のハードウェア各部を制御し、不揮発性メモリであるEEPROM12はセキュリティのモード等を記憶する。
そして、マイコン11は常時バッテリ42から電源が供給され、以下のモードのいずれかをとり、そのモード情報をEEPROM12に記憶する。
(1)無警戒モード
盗難検知を行わないモードであり、盗難防止装置1が盗難防止用送信機3からアンロック要求信号(または、ディスアーム要求信号、以下同じ)を受信すると無警戒モードになる。なお、他にキー挿入検知SW(図示せず)によりキー有と判別した場合や、IGSW35によりイグニッションオンを検出した場合のように、他の条件により無警戒モードにすることもできる。
そして、マイコン11は常時バッテリ42から電源が供給され、以下のモードのいずれかをとり、そのモード情報をEEPROM12に記憶する。
(1)無警戒モード
盗難検知を行わないモードであり、盗難防止装置1が盗難防止用送信機3からアンロック要求信号(または、ディスアーム要求信号、以下同じ)を受信すると無警戒モードになる。なお、他にキー挿入検知SW(図示せず)によりキー有と判別した場合や、IGSW35によりイグニッションオンを検出した場合のように、他の条件により無警戒モードにすることもできる。
(2)警戒モード
盗難防止装置1が盗難防止用送信機3からロック要求信号(または、アーミング要求信号、以下同じ)を受信すると、全ドア閉かつロック状態であれば警戒モードになり、モニタランプ40をその間点滅させ、車両外部に盗難警戒中であることを知らせる。
盗難防止装置1が盗難防止用送信機3からロック要求信号(または、アーミング要求信号、以下同じ)を受信すると、全ドア閉かつロック状態であれば警戒モードになり、モニタランプ40をその間点滅させ、車両外部に盗難警戒中であることを知らせる。
(3)警報モード
以下のいずれかの条件が成立すると、警報モードとなり、所定時間アラームを発生する。このアラームは、サイレン38、ハザードランプ39による警報とモニタランプ40(警戒中より短い周期で点滅)により行う。
(i)警戒モードでカーテシSW31またはフードSW32がオンとなり、ドア、フード、トランク等の開放を検出したとき
(ii)警戒モードで侵入センサ33または振動センサ34から検出信号を受信したとき
(iii)電源投入後のイニシャルルーチンでEEPROM12の記憶内容を読み取り、警戒モードが記憶されているとき
そして、このマイコン11は、警戒モードにおいて、遠隔始動装置2から遠隔始動開始信号を受信すると、少なくとも始動が完了するまでの時間に相当する所定時間無警戒モードに設定し、所定時間経過後に再び警戒モードにする。
以下のいずれかの条件が成立すると、警報モードとなり、所定時間アラームを発生する。このアラームは、サイレン38、ハザードランプ39による警報とモニタランプ40(警戒中より短い周期で点滅)により行う。
(i)警戒モードでカーテシSW31またはフードSW32がオンとなり、ドア、フード、トランク等の開放を検出したとき
(ii)警戒モードで侵入センサ33または振動センサ34から検出信号を受信したとき
(iii)電源投入後のイニシャルルーチンでEEPROM12の記憶内容を読み取り、警戒モードが記憶されているとき
そして、このマイコン11は、警戒モードにおいて、遠隔始動装置2から遠隔始動開始信号を受信すると、少なくとも始動が完了するまでの時間に相当する所定時間無警戒モードに設定し、所定時間経過後に再び警戒モードにする。
一方、遠隔始動装置2は同様にCPU、ROM、RAM等よりなるマイコン21を備えるとともに、カーテシSW31、フードSW32、IGSW35、エンジンがかかると出力がハイレベルになるオルタネータL端子41の出力等が入力されるとともに、IG系ラインが接続されている。
また、遠隔始動装置用送信機4には、図示せぬ送受信回路とスタートボタンとストップボタンが設けられるとともに、始動失敗を報知する「NG」ランプ、始動完了を報知する「始動」ランプが設けられている。
また、遠隔始動装置用送信機4には、図示せぬ送受信回路とスタートボタンとストップボタンが設けられるとともに、始動失敗を報知する「NG」ランプ、始動完了を報知する「始動」ランプが設けられている。
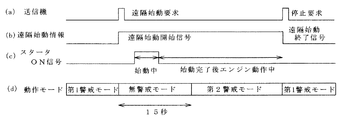
次に、この遠隔始動装置2の作用を図2のフローチャート及び図3の動作波形図により説明する。
遠隔始動装置2のマイコン21は、常時図2のフローチャートに示すプログラムを実行しており、このプログラムを開始すると、まず、マイコン21は遠隔始動装置用送信機4から送信コードを受信したか否かを判定し(ステップ101)、送信コードを受信していないと判定した場合、処理を終了し、送信コードを受信していると判定した場合には、受信したIDコードをメモリ(図示せず)に設定登録されている正規IDコードと比較することにより、正規IDコードと一致するか否かを判定する(ステップ102)。受信したIDコードと正規IDコードとが一致しないと判定した場合、マイコン21は処理を終了し、受信したIDコードが正規IDコードと一致したと判定した場合には、受信したファンクションコードにより遠隔始動装置用送信機4からの指令が始動要求か否かを判定する(ステップ103)。
遠隔始動装置2のマイコン21は、常時図2のフローチャートに示すプログラムを実行しており、このプログラムを開始すると、まず、マイコン21は遠隔始動装置用送信機4から送信コードを受信したか否かを判定し(ステップ101)、送信コードを受信していないと判定した場合、処理を終了し、送信コードを受信していると判定した場合には、受信したIDコードをメモリ(図示せず)に設定登録されている正規IDコードと比較することにより、正規IDコードと一致するか否かを判定する(ステップ102)。受信したIDコードと正規IDコードとが一致しないと判定した場合、マイコン21は処理を終了し、受信したIDコードが正規IDコードと一致したと判定した場合には、受信したファンクションコードにより遠隔始動装置用送信機4からの指令が始動要求か否かを判定する(ステップ103)。
遠隔始動装置用送信機4からの指令が始動要求であると判定した場合、マイコン21はエンジン始動条件が成立しているか否かを判定する(ステップ104)。
すなわち、マイコン21は、カーテシSW31、フードSW32、IGSW35、シフトレバーがパーキング位置にあることを検出するパーキングSW(図示せず)、ブレーキが作動状態にあることを検出するストップSW(図示せず)等の各種のスイッチやセンサの出力から安全状態か否かを確認(フード閉かつシフトレバーがパーキング位置かつドア閉かつサイドブレーキオンかつIGオフかつブレーキオフ等)することにより、エンジン始動条件が成立しているか否かを判定する。
すなわち、マイコン21は、カーテシSW31、フードSW32、IGSW35、シフトレバーがパーキング位置にあることを検出するパーキングSW(図示せず)、ブレーキが作動状態にあることを検出するストップSW(図示せず)等の各種のスイッチやセンサの出力から安全状態か否かを確認(フード閉かつシフトレバーがパーキング位置かつドア閉かつサイドブレーキオンかつIGオフかつブレーキオフ等)することにより、エンジン始動条件が成立しているか否かを判定する。
いずれかの始動条件が成立していない場合、マイコン21は遠隔始動装置用送信機4にアンサーバック1を送信し(ステップ105)、このアンサーバック1により遠隔始動装置用送信機4が「NG」ランプを黄色点灯する。これにより、ユーザはドアが開いている等、車両が安全状態にないことを認識することができる。
一方、全ての始動条件が成立している場合、マイコン21は、図3(b)に示す遠隔始動開始信号をラインL1により盗難防止装置1に出力した(ステップ106)後、IG系ラインにおけるACC信号ラインにACCオン出力を行い、車両のACC回路に電力を供給するACC用リレー(図示せず)をオンにする(ステップ107)。次に、マイコン21はIG系ラインにおけるIG信号ラインにIGオン出力を行い、車両のイグニッション回路に電力を供給するIG用リレー(図示せず)をオンする(ステップ108)。
一方、全ての始動条件が成立している場合、マイコン21は、図3(b)に示す遠隔始動開始信号をラインL1により盗難防止装置1に出力した(ステップ106)後、IG系ラインにおけるACC信号ラインにACCオン出力を行い、車両のACC回路に電力を供給するACC用リレー(図示せず)をオンにする(ステップ107)。次に、マイコン21はIG系ラインにおけるIG信号ラインにIGオン出力を行い、車両のイグニッション回路に電力を供給するIG用リレー(図示せず)をオンする(ステップ108)。
この後、マイコン21は電力供給が安定するのを待つためIGオンから2秒経過したか否かを判別し(ステップ109)、2秒経過すると、図3(c)に示すように、IG系ラインにおけるスタータ信号ラインにSTオン出力を行い、エンジンを始動するべくスタータモータを駆動させるためのスタータ起動用リレー(図示せず)をオンにする(ステップ110)。
次に、マイコン21はSTオンから3秒経過したか否かを判定し(ステップ111)、3秒経過すると、ST出力をオフした(ステップ112)後、オルタネータL端子41からの入力によりエンジン始動が完了したか否かを判定する(ステップ113)。
次に、マイコン21はSTオンから3秒経過したか否かを判定し(ステップ111)、3秒経過すると、ST出力をオフした(ステップ112)後、オルタネータL端子41からの入力によりエンジン始動が完了したか否かを判定する(ステップ113)。
ステップ113でエンジン始動が完了したと判定すると、マイコン21は始動回数カウンタの値Cを0にした(ステップ114)後、遠隔始動装置用送信機4にアンサーバック2を送信する(ステップ115)。このアンサーバック2により遠隔始動装置用送信機4が「始動」ランプを点灯するので、ユーザはエンジン始動が完了したことを認識することができる。
また、ステップ113でエンジン始動が完了していないと判定すると、マイコン21は始動回数カウンタの値Cに1を加算した(ステップ116)後、始動回数カウンタの値Cが3より大きいか否かを判定する(ステップ117)。始動回数カウンタの値Cが2以下の場合、マイコン21はステップ109に戻って再度エンジン始動を行い、始動回数カウンタの値Cが3より大きい場合には始動回数カウンタの値Cを0にする(ステップ118)。次に、マイコン21は、遠隔始動装置用送信機4にアンサーバック3を送信した(ステップ119)後、ラインL1に出力していた遠隔始動開始信号をオフすることにより、すなわち、遠隔始動終了信号を出力することにより、盗難防止装置1に遠隔始動終了を通知する(ステップ120)。
上記のアンサーバック3により遠隔始動装置用送信機4が「NG」ランプを赤色点灯するので、ユーザはエンジン始動に失敗したことを認識することができる。
上記のアンサーバック3により遠隔始動装置用送信機4が「NG」ランプを赤色点灯するので、ユーザはエンジン始動に失敗したことを認識することができる。
一方、ステップ103で遠隔始動装置用送信機4からの指令が始動要求でないと判定した場合、マイコン21は遠隔始動装置用送信機4からの指令が停止要求であるか否かを判定する(ステップ121)。遠隔始動装置用送信機4からの指令が停止要求でないと判定した場合、マイコン21は処理を終了し、遠隔始動装置用送信機4からの指令が停止要求であると判定した場合、図3(b)に示すように、ラインL1に出力していた遠隔始動開始信号をオフすることにより、すなわち、遠隔始動終了信号を出力することにより、盗難防止装置1に遠隔始動終了を通知する(ステップ122)。
なお、この実施例では遠隔始動開始信号のオン、オフにより、盗難防止装置1に遠隔始動開始、終了を通知したが、遠隔始動開始時点及び遠隔始動終了時点でコードによって盗難防止装置1に通知することも可能であり、更に他の方式によって遠隔始動開始信号と終了信号を送信してもよい。
なお、この実施例では遠隔始動開始信号のオン、オフにより、盗難防止装置1に遠隔始動開始、終了を通知したが、遠隔始動開始時点及び遠隔始動終了時点でコードによって盗難防止装置1に通知することも可能であり、更に他の方式によって遠隔始動開始信号と終了信号を送信してもよい。
また、遠隔始動装置2がエンジン停止条件として送信機4からの停止要求以外に、ドアまたはフードが開状態になったこと、ブレーキが踏まれたこと等、他の条件を追加してもよい。この場合、ステップ101でNOと判定された次に「停止条件成立?」という判断ステップを追加し、YESであればステップ122に移り、NOなら処理を終了するようにすればよい。こうすれば、送信機だけでなく、ドア開等によっても遠隔始動終了信号が出力されると共にエンジンが停止する。
遠隔始動終了を通知した後、マイコン21は、IG出力をオフ(ステップ123)、ACC出力をオフにしてエンジン停止処理を実行する(ステップ124)。次に、マイコン21は遠隔始動装置用送信機4にアンサーバック4を送信し(ステップ125)、このアンサーバック4により遠隔始動装置用送信機4が「始動」ランプを消灯するので、ユーザは遠隔エンジン始動が終了したことを認識することができる。
次に、盗難防止装置1の作用を図4−1、図4−2のフローチャート及び図3の動作波形図により説明する。
盗難防止装置1のマイコン11は、常時図4−1、図4−2のフローチャートに示すメインプログラムを実行しており、このプログラムを開始すると、まず、マイコン11は盗難防止用送信機3から送信コードを受信したか否かを判定し(ステップ201)、送信コードを受信したと判定した場合、受信したIDコードをメモリ(図示せず)に設定登録されている正規IDコードと比較することにより、正規IDコードと一致するか否かを判定する(ステップ202)。受信したIDコードと正規IDコードとが一致したと判定した場合、受信したファンクションコードにより盗難防止用送信機3からの指令がロック要求か否かを判定する(ステップ203)。
盗難防止装置1のマイコン11は、常時図4−1、図4−2のフローチャートに示すメインプログラムを実行しており、このプログラムを開始すると、まず、マイコン11は盗難防止用送信機3から送信コードを受信したか否かを判定し(ステップ201)、送信コードを受信したと判定した場合、受信したIDコードをメモリ(図示せず)に設定登録されている正規IDコードと比較することにより、正規IDコードと一致するか否かを判定する(ステップ202)。受信したIDコードと正規IDコードとが一致したと判定した場合、受信したファンクションコードにより盗難防止用送信機3からの指令がロック要求か否かを判定する(ステップ203)。
盗難防止用送信機3からの指令がロック要求であると判定した場合、マイコン11はカーテシSW31の出力より全ドアが閉となっているか否かを判定し(ステップ204)、いずれかのドアが閉となっていない場合には、マイコン11はアンサーバック1、例えば、ハザードランプ39を3回点滅させることにより、ユーザにドアがロックされなかったこと、セキュリティがセットできなかったことを通知する(ステップ205)。
また、ステップ204で全ドアが閉と判定した場合、マイコン11はロックモータ37にロック駆動信号を出力してドアをロックした(ステップ206)後、ロックポジションSW36からの入力により全ドアがロックされているか否かを判定する(ステップ207)。いずれかのドアがロックされていない場合、マイコン11は、上記と同様に、アンサーバック1を行い、ユーザにドアがロックされなかったこと、セキュリティがセットできなかったことを通知する(ステップ205)。
また、ステップ207で全ドアがロックされていると判定した場合、マイコン11は警戒モードをRAM(図示せず)に設定した(ステップ208)後、アンサーバック2、例えば、ハザードランプ39を1回点滅させることにより、ユーザにドアがロックされたこと、セキュリティがセットされたことを通知する(ステップ209)とともに、モニタランプ40の点滅を開始し、車両外部に盗難警戒中であることを知らせる(ステップ210)。
一方、ステップ203で盗難防止用送信機3からの指令がロック要求でないと判定した場合、マイコン11は受信したファンクションコードにより盗難防止用送信機3からの指令がアンロック要求か否かを判定する(ステップ211)。盗難防止用送信機3からの指令がアンロック要求であると判定した場合には、マイコン11はロックモータ37にアンロック駆動信号を出力してドアをアンロックする(ステップ212)。次に、マイコン11は、無警戒モードをRAMに設定した(ステップ213)後、アンサーバック3、例えば、ハザードランプ39を2回点滅させることにより、ユーザにドアがアンロックされたこと、セキュリティがリセットされたことを通知する(ステップ214)とともに、モニタランプ40を消灯する(ステップ215)。
そして、ステップ201で盗難防止用送信機3から送信コードを受信していないと判定した場合、ステップ202で受信したIDコードと正規IDコードとが一致しなかった場合、ステップ211で盗難防止用送信機3からの指令がアンロック要求でないと判定した場合、ステップ205でアンサーバック1を行った場合、ステップ210でモニタランプ40の点滅を開始した場合、あるいは、ステップ215でモニタランプ40を消灯した場合には、マイコン11はRAMに記憶されている動作モードが警戒モードか否かを判定する(ステップ216)。
動作モードが警戒モードであると判定した場合、マイコン11は、カーテシSW31、フードSW32、侵入センサ33、振動センサ34からの入力により盗難を検出したか否かを判定し(ステップ217)、盗難を検出した場合、RAMに記憶されている動作モードを警報モードに設定する(ステップ218)。ステップ218でモードを警報モードに設定した場合、ステップ216でモードが警戒モードでないと判定した場合、あるいは、ステップ217で盗難を検出していないと判定した場合、マイコン11はRAMに記憶されている動作モードとEEPROM12に記憶されている動作モードとを比較することにより動作モードの変更があったか否かを判定し(ステップ219)、動作モードの変更があったと判定した場合、RAMに記憶されている動作モードをEEPROM12に記憶する(ステップ220)。
次に、マイコン11はRAMに記憶されている動作モードが警報モードか否かを判定し(ステップ221)、動作モードが警報モードであると判定した場合、マイコン11は、サイレン38、ハザードランプ39による警報とモニタランプ40の短周期の点滅によりアラーム出力を行う(ステップ222)。次に、マイコン11はアラーム開始から30秒が経過したか否かを判定し(ステップ223)、アラーム開始から30秒経過したと判定した場合、アラームを停止する(ステップ224)とともに、RAMに記憶されている動作モードを警戒モードに設定する(ステップ225)。
ステップ225でモードを警戒モードに設定した場合、ステップ221でモードが警報モードでないと判定した場合、あるいは、ステップ223でアラーム開始から30秒経過していないと判定した場合には、マイコン11は遠隔始動装置2からラインL1を介して遠隔始動開始信号を受信しているか否かを判定し(ステップ226)、遠隔始動装置2から遠隔始動開始信号を受信していると判定した場合、RAMに記憶されている動作モードが警戒モードか否かを判定する(ステップ227)。
図3(d)に示すように、動作モードが警戒モードであるときに、遠隔始動開始信号を受信すると、マイコン11はRAMに記憶されている動作モードを無警戒モードに設定した(ステップ228)後、無警戒モード持続タイマの値Tを15秒にセットする(ステップ229)。
図3(d)に示すように、動作モードが警戒モードであるときに、遠隔始動開始信号を受信すると、マイコン11はRAMに記憶されている動作モードを無警戒モードに設定した(ステップ228)後、無警戒モード持続タイマの値Tを15秒にセットする(ステップ229)。
ステップ229でタイマをセットした場合、ステップ226で遠隔始動装置2から遠隔始動開始信号を受信していないと判定した場合、あるいは、ステップ227で動作モードが警戒モードでないと判定した場合には、マイコン11は、持続タイマの値Tが0より大きいか否かを判定し(ステップ230)、タイマの値Tが0より大きいと判定した場合、タイマの値Tを所定時間だけカウントダウンした(ステップ231)後、持続タイマの値TをEEPROM12に記憶する(ステップ232)。
次に、マイコン11は、遠隔始動装置2から遠隔始動終了信号を受信したか否かを判定し(ステップ233)、遠隔始動装置2から遠隔始動終了信号を受信していないと判定した場合、持続タイマの値Tが0になったか否かを判定し(ステップ234)、持続タイマの値Tが0になった場合、すなわち、遠隔始動開始信号を受信して無警戒モードを設定してから15秒経過した場合には、図3(d)に示すように、マイコン11はRAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。
また、遠隔始動開始信号を受信して無警戒モードを設定してから15秒経過する前に、遠隔始動終了信号を受信した場合には、マイコン11は、持続タイマの値T及びEEPROM12に記憶されている値Tを0にした(ステップ236)後、RAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。
そして、ステップ235で動作モードを警戒モードに設定した場合、ステップ230で持続タイマの値Tが0より小さいと判定した場合、あるいは、ステップ234で持続タイマの値Tが0になっていないと判定した場合には、マイコン11はプログラムを終了して次のメインプログラムを開始し、再び、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
そして、ステップ235で動作モードを警戒モードに設定した場合、ステップ230で持続タイマの値Tが0より小さいと判定した場合、あるいは、ステップ234で持続タイマの値Tが0になっていないと判定した場合には、マイコン11はプログラムを終了して次のメインプログラムを開始し、再び、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
次に、エンジン始動による電源電圧低下時、あるいは、泥棒によるバッテリ再接続時等、盗難防止装置1の起動時の作用について、図5のフローチャートにより説明する。
電源が復帰すると、盗難防止装置1のマイコン11は、図5のフローチャートに示すイニシャルプログラムを開始し、このプログラムを開始すると、まず、マイコン11は通常の初期化処理を行った(ステップ301)後、EEPROM12の記憶内容を読み出し、記憶されている動作モードが警戒モードか否かを判定する(ステップ302)。EEPROM12に記憶されている動作モードが警戒モードでない場合、マイコン11はEEPROM12に記憶されている動作モード及び持続タイマTの値を読み出し、RAMに設定する(ステップ303)。一方、EEPROM12に記憶されている動作モードが警戒モードの場合、マイコン11は警報モードをRAMに設定するとともに、EEPROM12から持続タイマTの値を読み出し、RAMに設定する(ステップ304)。この後、マイコン11は、図4−1、図4−2に示すメインプログラムを開始し、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
電源が復帰すると、盗難防止装置1のマイコン11は、図5のフローチャートに示すイニシャルプログラムを開始し、このプログラムを開始すると、まず、マイコン11は通常の初期化処理を行った(ステップ301)後、EEPROM12の記憶内容を読み出し、記憶されている動作モードが警戒モードか否かを判定する(ステップ302)。EEPROM12に記憶されている動作モードが警戒モードでない場合、マイコン11はEEPROM12に記憶されている動作モード及び持続タイマTの値を読み出し、RAMに設定する(ステップ303)。一方、EEPROM12に記憶されている動作モードが警戒モードの場合、マイコン11は警報モードをRAMに設定するとともに、EEPROM12から持続タイマTの値を読み出し、RAMに設定する(ステップ304)。この後、マイコン11は、図4−1、図4−2に示すメインプログラムを開始し、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
盗難防止装置1のマイコン11は以上のような作用を行うので、警戒モードになり、メインルーチンのステップ219、220でEEPROM12に警戒モードが記憶されている状態で、泥棒がバッテリを断線、再接続すると、EEPROM12に警戒モードが記憶されているため、図5のイニシャルルーチンのステップ304で警報モードが設定されるので、メインルーチンのステップ221、222でアラームが直ちに発生する。
また、警戒モードにおいて、遠隔始動装置2から遠隔始動開始信号を受信すると、ステップ226〜ステップ228で無警戒モードに設定され、設定された無警戒モードはステップ219、220でEEPROM12に記憶される。また、ステップ229で無警戒モード持続タイマの計数が開始され、ステップ232で無警戒モード持続タイマの値TがEEPROM12に記憶される。
なお、この実施例では、無警戒モードをステップ219、220でEEPROM12に記憶したが、ステップ228の次のステップで無警戒モード情報をEEPROM12に記憶するようにすることもできる。
なお、この実施例では、無警戒モードをステップ219、220でEEPROM12に記憶したが、ステップ228の次のステップで無警戒モード情報をEEPROM12に記憶するようにすることもできる。
この後、遠隔始動を行ってもバッテリ電圧が低下せず、盗難防止装置1のマイコン11がリセットされることなく動作を継続すると、ステップ230、231でタイマは計数を続け、15秒経過(ステップ234)または遠隔始動装置2からの遠隔始動終了信号を受信したとき(ステップ233)、ステップ235で元の警戒モードの状態に戻される。
なお、無警戒モード持続時間の15秒という時間は、図2のフローチャートに示すように、遠隔始動が3回繰り返されるため、それを見越した時間であり、遠隔始動が2回繰り返される場合は10秒、遠隔始動が1回のみの場合は5秒に設定すればよい。
なお、無警戒モード持続時間の15秒という時間は、図2のフローチャートに示すように、遠隔始動が3回繰り返されるため、それを見越した時間であり、遠隔始動が2回繰り返される場合は10秒、遠隔始動が1回のみの場合は5秒に設定すればよい。
一方、遠隔始動によりバッテリ電圧が低下した後復帰し、盗難防止装置1のマイコン11が一旦リセットされた後、起動されると、図5に示すイニシャルルーチンのステップ302でEEPROM12の記憶内容がチェックされるが、このときは起動前に既にEEPROM12の記憶内容が無警戒モードに変わっているため、ステップ304による警報モードへの移行は実行されない。
このとき、ステップ303でEEPROM12に記憶されている動作モード、すなわち、無警戒モードがマイコン11のRAMに設定されるとともに、無警戒モード持続タイマの値Tがマイコン11のRAMに設定され、メインルーチンのステップ230、231でタイマが計数を続けるので、上記と同様に、15秒経過(ステップ234)または遠隔始動装置2からの遠隔始動終了信号を受信したとき(ステップ233)、ステップ235で元の警戒モードの状態に戻される。
さらに、警報モードにおいて、遠隔始動装置2から遠隔始動開始信号を受信した場合は、ステップ228を通らないため、無警戒モードに設定されず、EEPROM12の記憶内容は、ステップ217〜ステップ220で記憶された警報モードのままである。
従って、この状態で(即ち、警報中)泥棒がバッテリを断線、再接続したり、遠隔始動によりバッテリ電圧が低下後復帰して盗難防止装置のマイコンが起動されると、メインルーチンのステップ221、222でアラームが直ちに発生する。
従って、この状態で(即ち、警報中)泥棒がバッテリを断線、再接続したり、遠隔始動によりバッテリ電圧が低下後復帰して盗難防止装置のマイコンが起動されると、メインルーチンのステップ221、222でアラームが直ちに発生する。
以上のように、警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定されるので、アラーム誤動作及び遠隔始動によるバッテリ電圧低下に起因する起動時アラーム機能の誤作動を防止することができる。
上記の実施例1では警戒モードにおいて遠隔始動要求があると、所定時間の間無警戒モードになるため、遠隔始動によるバッテリ電圧低下に伴う誤警報は防止することができるが、その反面所定時間の間、カーテシSW等による盗難検出機能が働かない。
この問題を解決するため、上記の所定時間の間は本来警戒モードであったので、この所定時間の間にカーテシSW等で盗難を検出すると、直ちに警戒モードに設定して警報モードに設定可能にするか、あるいはいきなり警報モードに設定してアラームを発生させるようにすることが好ましい。
この問題を解決するため、上記の所定時間の間は本来警戒モードであったので、この所定時間の間にカーテシSW等で盗難を検出すると、直ちに警戒モードに設定して警報モードに設定可能にするか、あるいはいきなり警報モードに設定してアラームを発生させるようにすることが好ましい。
以下、図6のフローチャートにより、無警戒モードになる所定時間の間にカーテシSW等で盗難を検出すると、直ちに警戒モードに設定して警報モードに設定可能にする場合のマイコン11の作用を説明するが、システム構成は図1と同じであり、また、図6のフローチャートのステップ226までの作用は図4−1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略する。
さらに、図6のフローチャートは図4−2のフローチャートのステップ232とステップ233との間に盗難検出ステップ237を入れたもので、ステップ232までの作用は図4−2に示すフローチャートの作用と同じであるので、ステップ232までの説明も省略する。
さらに、図6のフローチャートは図4−2のフローチャートのステップ232とステップ233との間に盗難検出ステップ237を入れたもので、ステップ232までの作用は図4−2に示すフローチャートの作用と同じであるので、ステップ232までの説明も省略する。
遠隔始動開始信号受信後、最大無警戒モード持続時間15秒の間に、ステップ237で、カーテシSW31、フードSW32、侵入センサ33、振動センサ34からの入力により盗難が検出されると、マイコン11は、持続タイマの値T及びEEPROM12に記憶されている値Tを0にした(ステップ236)後、RAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。これにより、次のルーチンのステップ217、218で警報モードに設定されるため、ステップ221、222でアラームが直ちに発生する。ここで、ステップ237では侵入センサ33と振動センサ34をも用いて盗難を検出するようにしたが、これは、エンジン始動による車両振動が少ない車両の場合に適用するものである。
なお、このときの警戒モード設定は、全ドア閉かつ全ドアロック等の通常の設定条件を見ることなく行い、また、アンサーバックも行わない。
なお、このときの警戒モード設定は、全ドア閉かつ全ドアロック等の通常の設定条件を見ることなく行い、また、アンサーバックも行わない。
さらに、図7−1、図7−2に示すフローチャートは、無警戒モードになる所定時間の間にカーテシSW等で盗難を検出すると、直ちに警報モードに設定してアラームを発生させる場合のマイコン1の作用を示すものであり、図6に示すフローチャートの盗難検出ステップ237で盗難検出した場合に、ステップ218に移行するようにしたものである。
上記と同様に、システム構成は図1と同じであり、また、ステップ232までの作用及びステップ233以降の作用は図4−1、図4−2に示すフローチャートの作用と同じであるので、説明を省略する。
上記と同様に、システム構成は図1と同じであり、また、ステップ232までの作用及びステップ233以降の作用は図4−1、図4−2に示すフローチャートの作用と同じであるので、説明を省略する。
遠隔始動開始信号受信後、最大無警戒モード持続時間15秒の間に、ステップ237で、カーテシSW31、フードSW32、侵入センサ33、振動センサ34からの入力により盗難が検出されると、マイコン11は、持続タイマの値T及びEEPROM12に記憶されている値Tを0にした(ステップ238)後、ステップ218に移行してRAMに記憶されている動作モードを警報モードに設定する(ステップ218)ので、ステップ221、222でアラームが直ちに発生する。
以上のように、遠隔始動開始信号受信後、無警戒モードになっている間に、盗難を検出した場合には、直ちに警戒モードに設定して警報モードに設定可能にするか、あるいはいきなり警報モードに設定してアラームを発生させることができる。
以上の実施例では、無警戒モード持続時間の起点を遠隔始動開始信号受信時のみとしたため、バッテリ電圧低下の影響を考えて無警戒モード持続時間の情報をEEPROMに記憶する必要があった。
この無警戒モード持続時間の起点を遠隔始動開始信号受信時と電源投入による動作開始時とすれば無警戒モード持続時間の情報をEEPROMに記憶させなくて済む。
この無警戒モード持続時間の起点を遠隔始動開始信号受信時と電源投入による動作開始時とすれば無警戒モード持続時間の情報をEEPROMに記憶させなくて済む。
図8及び図9に示すフローチャートは、無警戒モード持続時間の情報をEEPROMに記憶させなくて済むようにしたプログラムの作用を示すメインルーチンのフローチャートとイニシャルルーチンのフローチャートを示すものであるが、図8のフローチャートのステップ226までの作用は図4―1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略する。
さらに、図8、図9のフローチャートは、図6に示すフローチャートのステップ232とステップ236を削除するとともに、イニシャルルーチンのフローチャートに、遠隔始動されていれば無警戒モード持続時間タイマを作動させるステップ(ステップ307、308)を追加したものであり、図8のフローチャートのステップ231までの作用は図6に示すフローチャートの作用と同じであるので、説明を省略する。
さらに、図8、図9のフローチャートは、図6に示すフローチャートのステップ232とステップ236を削除するとともに、イニシャルルーチンのフローチャートに、遠隔始動されていれば無警戒モード持続時間タイマを作動させるステップ(ステップ307、308)を追加したものであり、図8のフローチャートのステップ231までの作用は図6に示すフローチャートの作用と同じであるので、説明を省略する。
遠隔始動開始信号受信後、最大無警戒モード持続時間15秒の間に、ステップ237で、カーテシSW31、フードSW32、侵入センサ33、振動センサ34からの入力により盗難が検出されると、マイコン11は、直ちにRAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。これにより、次のルーチンのステップ217、218で警報モードに設定されるため、ステップ221、222でアラームが直ちに発生する。
一方、電源復帰後のイニシャル時には図9のフローチャートに示すように、盗難防止装置1のマイコン11は、通常の初期化処理を行った(ステップ301)後、EEPROM12の記憶内容を読み出し、記憶されている動作モードが警戒モードか否かを判定する(ステップ302)。EEPROM12に記憶されている動作モードが警戒モードでない場合、マイコン11はEEPROM12に記憶されている動作モードをRAMに設定し(ステップ305)、EEPROM12に記憶されている動作モードが警戒モードの場合、警報モードをRAMに設定する(ステップ306)。
次に、マイコン11は遠隔始動されているか否かを判定し(ステップ307)、遠隔始動されていると判定した場合、無警戒モード持続タイマの値Tを15秒にセットする(ステップ308)。この後、マイコン11は、メインプログラムを開始し、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
なお、遠隔始動されているか否かの判定は、遠隔始動開始信号受信によりEEPROM12にエンジン作動中情報を記憶して判定するか、あるいは、キー挿入検知SW、IGSW35からの入力によりキーなしIGオンを判断することにより判定することが可能である。
なお、遠隔始動されているか否かの判定は、遠隔始動開始信号受信によりEEPROM12にエンジン作動中情報を記憶して判定するか、あるいは、キー挿入検知SW、IGSW35からの入力によりキーなしIGオンを判断することにより判定することが可能である。
以上のようにすれば、無警戒モード持続タイマの値を各ルーチンでEEPROMに記憶させる工程が不要となるので、動作を高速化でき、遠隔始動により盗難防止装置のマイコンがリセットされなければ、遠隔始動開始信号受信時から15秒後に警戒モードに復帰し、マイコンがリセットされれば、起動開始後15秒経過したときに警戒モードに復帰する。
一方、上記の実施例のように、遠隔始動後の無警戒モードにおいて盗難を検出するようにすると、エンジン始動による車両振動に起因して侵入センサや振動センサが出力を発することにより誤警報が発生することがある。
このため、遠隔始動後の無警戒モードにおいて、カーテシSW,フードSW等の車両振動にその出力が影響されないセンサのみで盗難を検出することにより、誤警報を防止することができる。
このため、遠隔始動後の無警戒モードにおいて、カーテシSW,フードSW等の車両振動にその出力が影響されないセンサのみで盗難を検出することにより、誤警報を防止することができる。
図10及び図11に示すフローチャートは、車両振動にその出力が影響されないセンサのみで盗難を検出するようにしたプログラムの作用を示すメインルーチンのフローチャートとイニシャルルーチンのフローチャートを示すものであるが、図10のフローチャートのステップ226までの作用は図4−1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略する。
さらに、図10のフローチャートのステップ228までの作用は図4−2に示すフローチャートの作用と同じであるので、説明を省略する。
なお、この実施例では、図12(d)に示すように、無警戒モード持続時間は遠隔始動開始から15秒ではなく、遠隔始動開始からエンジンが停止するまでの期間としている。
さらに、図10のフローチャートのステップ228までの作用は図4−2に示すフローチャートの作用と同じであるので、説明を省略する。
なお、この実施例では、図12(d)に示すように、無警戒モード持続時間は遠隔始動開始から15秒ではなく、遠隔始動開始からエンジンが停止するまでの期間としている。
警戒モードにおいて、遠隔始動装置2から遠隔始動開始信号を受信すると、マイコン11は、ステップ226〜ステップ228で無警戒モードに設定するとともに、遠隔制御中フラグをEEPROM12にセットする(ステップ239)。なお、ステップ228で設定された無警戒モード情報はステップ219、220でEEPROM12に記憶される。
次に、マイコン11はEEPROM12の遠隔制御中フラグがセットされているか否かをチェックすることにより遠隔制御中であるか否かを判定する(ステップ240)。エンジンが遠隔制御中でないと判定した場合、プログラムを終了し、エンジンが遠隔制御中と判定した場合は、カーテシSW31及びフードSW32からの入力によりドアまたはフードが開となったか否かを判定する(ステップ241)。
ドアまたはフードが開となっていないと判定すると、マイコン11は、遠隔始動装置2から遠隔始動終了信号を受信したか否かを判定し(ステップ233)、遠隔始動装置2から遠隔始動終了信号を受信していないと判定した場合、プログラムを終了し、遠隔始動装置2から遠隔始動終了信号を受信したと判定した場合、EEPROM12の遠隔制御中フラグをクリアした(ステップ242)後、RAMに記憶されている動作モードを警戒モードに設定し(ステップ235)、プログラムを終了する。
一方、ステップ241でドアまたはフードが開となっていると判定した場合、マイコン11は直ちにRAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。
これにより、次のルーチンのステップ217、218で警報モードに設定されるため、ステップ221、222でアラームが直ちに発生する。
なお、ステップ241でドアまたはフードが開となっていると判定した場合、ステップ218に移行させ、直ちに警報モードに設定することも可能である。また、遠隔始動装置2のエンジン停止条件にドア開またはフード開が入っている場合は、泥棒がドアを不正に開ければ遠隔始動終了信号が出力されるため、この場合、ステップ241かステップ233のどちらかが先にYESと判定した時点でステップ235により警戒モードに設定される。このことは他の実施例についても同様である。
これにより、次のルーチンのステップ217、218で警報モードに設定されるため、ステップ221、222でアラームが直ちに発生する。
なお、ステップ241でドアまたはフードが開となっていると判定した場合、ステップ218に移行させ、直ちに警報モードに設定することも可能である。また、遠隔始動装置2のエンジン停止条件にドア開またはフード開が入っている場合は、泥棒がドアを不正に開ければ遠隔始動終了信号が出力されるため、この場合、ステップ241かステップ233のどちらかが先にYESと判定した時点でステップ235により警戒モードに設定される。このことは他の実施例についても同様である。
また、電源復帰後のイニシャル時には、盗難防止装置1のマイコン11は図11に示すプログラムを開始し、通常の初期化処理を行った(ステップ301)後、EEPROM12の記憶内容を読み出し、記憶されている動作モードが警戒モードか否かを判定する(ステップ302)。EEPROM12に記憶されている動作モードが警戒モードでない場合、マイコン11はEEPROM12に記憶されている動作モードをRAMに記憶し(ステップ305)、EEPROM12に記憶されている動作モードが警戒モードの場合、警報モードをRAMに設定する(ステップ306)。
上記のように、遠隔制御中は侵入センサや振動センサの出力を検出しないようにすることにより、遠隔始動後の無警戒モードにおいて、エンジン始動による車両振動に起因して侵入センサや振動センサが出力を発することによる誤警報を防止することができる。
なお、上記の実施例では、ステップ239で遠隔制御中フラグをEEPROM12にセットしたが、ステップ239、242を削除し、ステップ240でキー挿入検知SW、IGSW35からの入力により、キーなしIGオンを判断することにより、遠隔制御中と判定するようにすることも可能である。
なお、上記の実施例では、ステップ239で遠隔制御中フラグをEEPROM12にセットしたが、ステップ239、242を削除し、ステップ240でキー挿入検知SW、IGSW35からの入力により、キーなしIGオンを判断することにより、遠隔制御中と判定するようにすることも可能である。
以上の実施例では、遠隔始動後の無警戒モードにおいて、盗難を検出した場合直ちにアラームを発生させたが、遠隔始動後の無警戒モードにおいて、カーテシSW、フードSW等の車両振動にその出力が影響されないセンサのみで盗難を検出した場合、その情報をEEPROMに記憶し、再び警戒モードに設定されたときにEEPROMの内容をチェックし、盗難検出が記憶されていれば直ちにアラームを発生させることもできる。
図13に示すフローチャートは、車両振動にその出力が影響されないセンサのみで盗難を検出した場合、再び警戒モードに設定されたときにアラームを発生させるようにしたプログラムの作用を示すメインルーチンのフローチャートを示すものであるが、図13のフローチャートのステップ226までの作用は図4−1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略する。
さらに、図13のフローチャートのステップ232まで及びステップ233〜236の作用は図6に示すフローチャートの作用と同じであるので、説明を省略する。
さらに、図13のフローチャートのステップ232まで及びステップ233〜236の作用は図6に示すフローチャートの作用と同じであるので、説明を省略する。
遠隔始動開始信号受信後、最大無警戒モード持続時間15秒の間、マイコン11は、ドアまたはフードが閉から開になったか否かを判定し(ステップ243)、ドアまたはフードが閉から開になったと判定した場合、EEPROM12にドアまたはフード開情報を記憶する(ステップ244)。
また、ステップ235で警戒モードが設定された場合、マイコン11は、EEPROM12にドアまたはフード開情報が記憶されているか否かを判定し(ステップ245)、ドアまたはフード開情報が記憶されていないと判定した場合、プログラムを終了し、ドアまたはフード開情報が記憶されていると判定した場合、警報モードを設定する(ステップ246)。
また、ステップ235で警戒モードが設定された場合、マイコン11は、EEPROM12にドアまたはフード開情報が記憶されているか否かを判定し(ステップ245)、ドアまたはフード開情報が記憶されていないと判定した場合、プログラムを終了し、ドアまたはフード開情報が記憶されていると判定した場合、警報モードを設定する(ステップ246)。
したがって、警戒モードにおいて、遠隔始動装置から遠隔始動開始信号を受信すると、ステップ226〜228で無警戒モードに設定されるとともに、ステップ229で無警戒モード持続タイマTの計数を開始し、この持続タイマTの値はステップ232でEEPROM12に記憶される。
ステップ228で設定された無警戒モード情報はステップ219、220でEEPROM12に記憶されるが、ステップ228の次のステップで無警戒モード情報を直接EEPROM12に記憶してもよい。
ステップ228で設定された無警戒モード情報はステップ219、220でEEPROM12に記憶されるが、ステップ228の次のステップで無警戒モード情報を直接EEPROM12に記憶してもよい。
そして、遠隔操作による無警戒モード中はステップ243でドアまたはフードのチェックを行い、閉→開状態を検出するとその情報をEEPROM12に記憶する。
その後、ステップステップ235で警戒モードに再設定されたとき、ステップ245でEEPROM12の記憶内容をチェックし、ドアまたはフード開情報が記憶されていれば、ステップ246で警報モードに設定されるので、アラームが発生する。
なお、ステップ217の盗難検出ステップでEEPROM12の情報もチェックするようにすれば、ステップ218で警報モードに設定されるため、ステップ245、246は不要である。
その後、ステップステップ235で警戒モードに再設定されたとき、ステップ245でEEPROM12の記憶内容をチェックし、ドアまたはフード開情報が記憶されていれば、ステップ246で警報モードに設定されるので、アラームが発生する。
なお、ステップ217の盗難検出ステップでEEPROM12の情報もチェックするようにすれば、ステップ218で警報モードに設定されるため、ステップ245、246は不要である。
以上のように、遠隔始動後の無警戒モードにおいて、カーテシSW、フードSW等の車両振動にその出力が影響されないセンサのみで盗難を検出した場合、その情報がEEPROM12に記憶されるので、再び警戒モードに設定されたときにEEPROM12の内容をチェックし、盗難検出が記憶されていれば直ちにアラームを発生させることができる。
また、図14に示すフローチャートは、実施例4においてカーテシSW、フードSW等の車両振動にその出力が影響されないセンサのみで盗難を検出した場合にその情報をEEPROMに記憶するようにしたプログラムの作用を示すものであるが、図14のフローチャートのステップ226までの作用は図4−1のフローチャートのステップ217でEEPROM12の内容も確認する点を除いて図4−1のフローチャートの作用と同じであるので、フローチャート及びその説明を省略する。
さらに、図14のフローチャートのステップ240までの作用は図10に示すフローチャートの作用と同じであるので、説明を省略する。
さらに、図14のフローチャートのステップ240までの作用は図10に示すフローチャートの作用と同じであるので、説明を省略する。
ステップ243において、ドアまたはフードが閉から開になったか否かを判定し、ドアまたはフードが閉から開になったと判定した場合、マイコン11は、EEPROM12にドアまたはフード開情報を記憶する(ステップ244)。
次に、マイコン11は、遠隔始動装置2から遠隔始動終了信号を受信したか否かを判定し(ステップ233)、遠隔始動装置2から遠隔始動終了信号を受信していないと判定した場合、プログラムを終了し、遠隔始動装置2から遠隔始動終了信号を受信したと判定した場合、EEPROM12の遠隔制御中フラグをクリアした(ステップ242)後、RAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。
なお、イニシャルルーチンのフローチャートは図11と同じであるので、説明を省略する。
次に、マイコン11は、遠隔始動装置2から遠隔始動終了信号を受信したか否かを判定し(ステップ233)、遠隔始動装置2から遠隔始動終了信号を受信していないと判定した場合、プログラムを終了し、遠隔始動装置2から遠隔始動終了信号を受信したと判定した場合、EEPROM12の遠隔制御中フラグをクリアした(ステップ242)後、RAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。
なお、イニシャルルーチンのフローチャートは図11と同じであるので、説明を省略する。
したがって、警戒モード中において、遠隔始動装置2から遠隔始動開始信号を受信すると、図15(d)に示すように、無警戒モードに設定され、エンジン作動中は無警戒モードを維持する。また、遠隔始動終了信号を受信するか、あるいは、ドア開等の何らかの原因でエンジンが停止すると、直ちに警戒モードに移行する。
そして、遠隔始動による無警戒モード中はドア、フード等、エンジン振動による影響を受けないセンサ出力をチェックしてドア開等の盗難行為を検出すると、EEPROMに記憶する。図4−1のフローチャートのステップ217の盗難検出ではEEPROM12の内容も確認されるので、遠隔制御が終了して警戒モードに移行したとき、ドア開情報がEEPROM12に記憶されていれば、警報モードとなり直ちに警報が出力される。
そして、遠隔始動による無警戒モード中はドア、フード等、エンジン振動による影響を受けないセンサ出力をチェックしてドア開等の盗難行為を検出すると、EEPROMに記憶する。図4−1のフローチャートのステップ217の盗難検出ではEEPROM12の内容も確認されるので、遠隔制御が終了して警戒モードに移行したとき、ドア開情報がEEPROM12に記憶されていれば、警報モードとなり直ちに警報が出力される。
さらに、警戒モードとして2つのモードを持たせることにより誤警報を防止することもでき、従来の警戒モードと同じように、全センサ及びバッテリ再接続に応答する第1警戒モードと、バッテリ再接続及び車両振動の影響で出力を生じるセンサ、例えば、侵入センサ、振動センサに応答しない第2警戒モードを設け、送信機によるアーミング時は第1警戒モードを設定し、遠隔始動時はエンジンが停止するまで第2警戒モードに設定する。
図16−1、図16−2及び図17に示すフローチャートは、警戒モードとして2つのモードを持たせた場合の盗難防止装置の作用を示すメインルーチンのフローチャートとイニシャルルーチンのフローチャートを示すものである。
なお、上記と同様に、システム構成は図1と同じであり、また、図16−1のフローチャートのステップ248までの作用は、ステップ247で第1警戒モードに設定する点を除いて、図4−1に示すフローチャートの作用と同じであるので、説明を省略し、ステップ248以降について説明する。
なお、上記と同様に、システム構成は図1と同じであり、また、図16−1のフローチャートのステップ248までの作用は、ステップ247で第1警戒モードに設定する点を除いて、図4−1に示すフローチャートの作用と同じであるので、説明を省略し、ステップ248以降について説明する。
盗難防止装置1のマイコン11は、RAMに記憶されている動作モードが第1警戒モードか否かを判定し(ステップ248)、動作モードが第1警戒モードであると判定した場合、カーテシSW31、フードSW32、侵入センサ33、振動センサ34からの入力により盗難を検出したか否かを判定する(ステップ217)。そして、盗難を検出した場合、マイコン11はRAMに記憶されている動作モードを警報モードに設定する(ステップ218)。ステップ218でモードを警報モードに設定した場合、ステップ248でモードが第1警戒モードでないと判定した場合、あるいは、ステップ217で盗難が発生していないと判定した場合、マイコン11はRAMに記憶されている動作モードとEEPROM12に記憶されている動作モードとを比較することにより動作モードの変更があったか否かを判定し(ステップ219)、動作モードの変更があった場合には、RAMに記憶されている動作モードをEEPROM12に記憶する(ステップ220)。
次に、マイコン11はRAMに記憶されている動作モードが警報モードか否かを判定し(ステップ221)、動作モードが警報モードであると判定した場合、マイコン11はアラーム出力を行う(ステップ222)。次に、マイコン11はアラーム開始から30秒が経過したか否かを判定し(ステップ223)、アラーム開始から30秒経過したと判定した場合、アラームを停止する(ステップ224)とともに、RAMに記憶されている動作モードを第1警戒モードに設定する(ステップ249)。
ステップ249で動作モードを第1警戒モードに設定した場合、ステップ221で動作モードが警報モードでないと判定した場合、あるいは、ステップ223でアラーム開始から30秒経過していないと判定した場合には、マイコン11は遠隔始動装置2から遠隔始動開始信号を受信しているか否かを判定し(ステップ226)、遠隔始動装置2から遠隔始動開始信号を受信していると判定した場合、RAMに記憶されている動作モードが第1警戒モードか否かを判定する(ステップ250)。
動作モードが第1警戒モードであると判定した場合、マイコン11はRAMに記憶されている動作モードを第2警戒モードに設定する(ステップ251)。このステップ251で設定された第2警戒モードはステップ219、220でEEPROM12に記憶される。
そして、ステップ251で動作モードを第2警戒モードに設定した場合、ステップ226で遠隔始動開始信号を受信していないと判定した場合、あるいは、ステップ250で動作モードが第1警戒モードでないと判定した場合には、マイコン11はRAMに記憶されている動作モードが第2警戒モードか否かを判定する(ステップ252)。
そして、ステップ251で動作モードを第2警戒モードに設定した場合、ステップ226で遠隔始動開始信号を受信していないと判定した場合、あるいは、ステップ250で動作モードが第1警戒モードでないと判定した場合には、マイコン11はRAMに記憶されている動作モードが第2警戒モードか否かを判定する(ステップ252)。
動作モードが第2警戒モードであると判定した場合、マイコン11はカーテシSW31及びフードSW32からの入力によりドアまたはフードが開となったか否かを判定し(ステップ241)、ドアまたはフードが開となっていないと判定すると、遠隔始動装置2から遠隔始動終了信号を受信したか否かを判定する(ステップ233)。遠隔始動装置2から遠隔始動終了信号を受信していないと判定した場合、プログラムを終了し、遠隔始動装置2から遠隔始動終了信号を受信したと判定した場合、マイコン11はRAMに記憶されている動作モードを第1警戒モードに設定した(ステップ253)後、プログラムを終了する。
一方、ステップ241でドアまたはフードが開となっていると判定した場合、マイコン11は直ちにRAMに記憶されている動作モードを第1警戒モードに設定する(ステップ253)。
これにより、次のルーチンのステップ217、218で警報モードに設定されるため、ステップ221、222でアラームが直ちに発生する。
なお、ステップ241でドアまたはフードが開となっていると判定した場合、ステップ218に移行させ、直ちに警報モードに設定することも可能である。
これにより、次のルーチンのステップ217、218で警報モードに設定されるため、ステップ221、222でアラームが直ちに発生する。
なお、ステップ241でドアまたはフードが開となっていると判定した場合、ステップ218に移行させ、直ちに警報モードに設定することも可能である。
そして、電源復帰後のイニシャル時には、盗難防止装置1のマイコン11は図17に示すプログラムを開始し、通常の初期化処理を行った(ステップ301)後、EEPROM12の記憶内容を読み出し、記憶されている動作モードが第1警戒モードか否かを判定する(ステップ309)。EEPROM12に記憶されている動作モードが第1警戒モードでない場合、マイコン1はEEPROM12に記憶されている動作モードをRAMに設定し(ステップ305)、EEPROM12に記憶されている動作モードが第1警戒モードの場合、警報モードをRAMに設定する(ステップ306)。
従って、遠隔始動によりバッテリ電圧が低下後復帰して盗難防止装置1のマイコン11が一旦リセットされた後起動されると、図17のフローチャートのイニシャルルーチンのステップ309でEEPROM12の記憶内容がチェックされるが、このときは起動前に図16−1、図16−2のフローチャートのメインルーチンのステップ251及びステップ220でEEPROM12の記憶内容が第2警戒モードに変わっているため、ステップ306による警報モードへの移行は実行されない。
また、遠隔操作によるエンジン作動中(エンジン始動中及び始動完了後)は、図18(d)に示すように、遠隔始動終了信号を受信するまで第2警戒モードが設定されており、このとき、ドア開やフード開を検出すると、ステップ241、253で第1警戒モードに設定され、ステップ217、218で警報モードに移行するが、エンジン作動中の第2警戒モード時は侵入センサ33や振動センサ34の出力は検出しないので、エンジン始動による車両振動に起因して侵入センサや振動センサが出力を発することによる誤警報を防止することができる。
なお、本実施例では、エンジン作動中の間第2警戒モードに設定したが、エンジンの始動が完了するまで第2警戒モードに設定し、始動完了後に第1警戒モードに戻すようにしてもよい。この場合、図16−2のステップ233を「始動完了?」とすればよい。この始動完了の判定は遠隔始動装置2がオルタネータL端子41出力により始動完了を判定し、ラインL1を介して始動完了情報を盗難防止装置1に出力することで行う。
上記の実施例では、送信機によるアーミング時は第1警戒モードを設定し、遠隔始動時はエンジンが停止するまで第2警戒モードに設定したが、送信機によるアーミング時は第1警戒モードを設定し、遠隔始動時は始動完了までは無警戒モードにし、始動完了後はエンジンが停止するまで第2警戒モードに設定し、エンジン停止後は第1警戒モードに戻すこともできる。
図19及び図20に示すフローチャートは、遠隔始動時は始動完了までは無警戒モードにし、始動完了後はエンジンが停止するまで第2警戒モードに設定する場合のプログラムの作用を示すメインルーチンのフローチャートとイニシャルルーチンのフローチャートを示すものであるが、図19のフローチャートのステップ226までの作用は図16−1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略し、ステップ226以降について説明する。
マイコン11は遠隔始動装置2からラインL1を介して遠隔始動開始信号を受信しているか否かを判定し(ステップ226)、遠隔始動装置2から遠隔始動開始信号を受信していると判定した場合、RAMに記憶されている動作モードが第1警戒モードか否かを判定する(ステップ250)。
図21(d)に示すように、動作モードが第1警戒モードであるときに、遠隔始動開始信号を受信すると、マイコン11はRAMに記憶されている動作モードを無警戒モードに設定する(ステップ254)。次に、マイコン11は無警戒モード持続タイマの値Tを15秒にセットした(ステップ255)後、遠隔始動フラグをEEPROM12にセットする(ステップ256)。
図21(d)に示すように、動作モードが第1警戒モードであるときに、遠隔始動開始信号を受信すると、マイコン11はRAMに記憶されている動作モードを無警戒モードに設定する(ステップ254)。次に、マイコン11は無警戒モード持続タイマの値Tを15秒にセットした(ステップ255)後、遠隔始動フラグをEEPROM12にセットする(ステップ256)。
ステップ256で遠隔始動フラグをセットした場合、ステップ226で遠隔始動装置2から遠隔始動開始信号を受信していないと判定した場合、あるいは、ステップ250で動作モードが第1警戒モードでないと判定した場合には、マイコン11は、持続タイマの値Tが0より大きいか否かを判定し(ステップ257)、タイマの値Tが0より大きいと判定した場合、タイマの値Tを所定時間だけカウントダウンする(ステップ258)。次に、マイコン11はドアまたはフードが閉から開になったか否かを判定し(ステップ259)、ドアまたはフードが閉から開になったと判定した場合、EEPROM12にドアまたはフード開情報を記憶する(ステップ260)。
ステップ259でドアまたはフードが閉から開になっていないと判定した場合、または、ステップ260でドアまたはフード開情報を記憶した場合、マイコン11は、持続タイマの値Tが0になったか否かを判定し(ステップ261)、持続タイマの値Tが0になった場合、すなわち、遠隔始動開始信号を受信して無警戒モードを設定してから15秒経過した場合には、図21(d)に示すように、マイコン11はRAMに記憶されている動作モードを第2警戒モードに設定する(ステップ262)。次に、マイコン11は、EEPROM12にドアまたはフード開情報が記憶されているか否かを判定し(ステップ263)、ドアまたはフード開情報が記憶されていると判定した場合、警報モードを設定する(ステップ264)。
ステップ264で警報モードを設定した場合、ステップ257でタイマの値Tが0以下であると判定した場合、ステップ261で持続タイマの値Tが0でないと判定した場合、あるいは、ステップ263でドアまたはフード開情報が記憶されていないと判定した場合、マイコン11は、遠隔始動装置2から遠隔始動終了信号を受信したか否かを判定し(ステップ265)、遠隔始動装置2から遠隔始動終了信号を受信したと判定した場合、RAMに記憶されている動作モードを第1警戒モードに設定した(ステップ266)後、EEPROMに記憶されている遠隔始動フラグをクリアする(ステップ267)。
次に、マイコン11は、動作モードが第2警戒モードか否かを判定し(ステップ268)、動作モードが第2警戒モードであると判定した場合、ドアまたはフードが開いているか否かを判定する(ステップ269)。そして、ドアまたはフードが開いていると判定した場合、マイコン11は、警報モードを設定し(ステップ270)、ドアまたはフードが開いていないと判定した場合、または、ステップ268で動作モードが第2警戒モードでないと判定した場合には、プログラムを終了して次のメインプログラムを開始し、再び、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
そして、マイコン11の起動時には、マイコン11は図20に示すイニシャルルーチンのプログラムを開始し、通常の初期化処理を行った(ステップ301)後、EEPROM12の記憶内容を読み出し、記憶されている動作モードが第1警戒モードか否かを判定する(ステップ309)。EEPROM12に記憶されている動作モードが第1警戒モードでない場合、マイコン1はEEPROM12に記憶されている動作モードをRAMに設定し(ステップ305)、EEPROM12に記憶されている動作モードが第1警戒モードの場合、警報モードをRAMに設定する(ステップ306)。
次に、マイコン11はEEPROM12に遠隔始動フラグがセットされているか否かを判定し(ステップ310)、遠隔始動フラグがセットされていると判定した場合、無警戒モード持続タイマの値Tを15秒にセットする(ステップ311)。この後、マイコン11はメインプログラムを開始し、盗難防止用送信機3から送信コードを受信したか否かを判定する(ステップ201)。
なお、この実施例では、マイコン起動時のイニシャルルーチンで第1警戒モードがEEPROM12に記憶されていれば警報モードに移行したが、第2警戒モードがバッテリ再接続に応答するようにすることもでき、その場合には、ステップ309で第1または第2警戒モードがEEPROM12に記憶されているか否かを判定することにより、警報モードに移行することができる。
なお、この実施例では、マイコン起動時のイニシャルルーチンで第1警戒モードがEEPROM12に記憶されていれば警報モードに移行したが、第2警戒モードがバッテリ再接続に応答するようにすることもでき、その場合には、ステップ309で第1または第2警戒モードがEEPROM12に記憶されているか否かを判定することにより、警報モードに移行することができる。
以上のように、第1警戒モードにおいて、遠隔始動装置から遠隔始動開始信号を受信すると、ステップ226〜254で無警戒モードに設定され、ステップ255で無警戒モード持続タイマTの計数が開始されるとともに、遠隔始動が実行されていることを示す情報としてTの値でなく遠隔始動フラグがステップ256でEEPROM12に記憶される。
ステップ254で設定された無警戒モード情報はステップ219、220でEEPROM12に記憶されるが、ステップ254の次のステップで無警戒モード情報を直接EEPROM12に記憶してもよい。
ステップ254で設定された無警戒モード情報はステップ219、220でEEPROM12に記憶されるが、ステップ254の次のステップで無警戒モード情報を直接EEPROM12に記憶してもよい。
そして、無警戒モード持続時間15秒の間に遠隔始動装置によるエンジン始動に伴うバッテリ電圧低下によって盗難防止装置がリセットされたときはイニシャルルーチンから開始されるが、EEPROM12に記憶されたモード情報は無警戒モードになっているため警報モードには移行しない。また、このときは遠隔始動フラグがセットされているために、ステップ310、311で無警戒モード持続タイマが15秒に再セットされて計数を開始する。
また、遠隔始動による無警戒モード中はステップ259でドアまたはフードのチェックを行い、閉→開状態を検出するとその情報がEEPROM12に記憶され、15秒が経過してステップ262で第2警戒モードに設定された場合、ステップ263でEEPROM12の記憶内容をチェックし、ドアまたはフード開情報が記憶されていれば、ステップ264で警報モードに設定され、アラームが発生する。そして、始動完了後、エンジンが停止するまでの第2警戒モード中はステップ268〜270でドアまたはフード開のみを検出する。
なお、ステップ269の盗難検出ステップでEEPROM12の情報もチェックするようにすれば、ステップ270で警報モードに設定されるため、ステップ263、264は不要である。
なお、ステップ269の盗難検出ステップでEEPROM12の情報もチェックするようにすれば、ステップ270で警報モードに設定されるため、ステップ263、264は不要である。
以上の実施例1、2、3、5、7では、遠隔始動制御を開始してから始動完了に要する最大時間、すなわち15秒の間無警戒モードに設定したが、遠隔始動装置がオルタネータL端子41により始動を完了したことを検出して遠隔始動装置から始動完了時に完爆信号を盗難防止装置に出力し、ステップ234(図4−2、6、7−2、8、13)及びステップ261(図19)を「T=0または完爆信号受信」とすることもでき、こうすることにより、1回目の始動動作でエンジンがかかった場合、直ちに警戒モードまたは第2警戒モードに移行できるため、セキュリティ性を向上することができる。この場合、ステップ234及びステップ261でYESと判定したときに、タイマTを0にクリアしておく。
なお、「遠隔始動終了信号」はエンジンの駆動を停止するときに発生し、「完爆信号」はエンジン始動が完了したとき、すなわち、エンジンがかかったときに出力される。
なお、「遠隔始動終了信号」はエンジンの駆動を停止するときに発生し、「完爆信号」はエンジン始動が完了したとき、すなわち、エンジンがかかったときに出力される。
以上の実施例では、遠隔始動時の無警戒モード持続時間は、遠隔始動装置による始動リトライ時間を考慮し、最大リトライ回数に要する時間(即ち15秒)としたが、このため、1回でエンジン始動が完了した場合、それ以降15秒経過するまでの間も無警戒モードが持続してしまうので、セキュリティ性をさらに向上するため、遠隔始動装置がスタータオン信号を出力している間またはその期間に安定時間を加えた期間のみ無警戒モードにすることが好ましい。
そのため、この実施例では遠隔始動装置がスタータモータを駆動するための駆動信号であるスタータオン信号を出力するとき、その出力期間中スタータオン情報を盗難防止装置に出力し、盗難防止装置は、スタータオン情報を受信している間+αの時間、またはスタータオン情報受信後スタータオン信号出力期間+αの時間に相当する、所定時間の間無警戒モードに設定する。
さらに、遠隔始動装置による無警戒モード設定中は、ドア、フードの状態を検出してEEPROMに記憶し、警戒モード再設定時にEEPROMにドア開が記憶されていれば、直ちにアラームを発生するようにする。
さらに、遠隔始動装置による無警戒モード設定中は、ドア、フードの状態を検出してEEPROMに記憶し、警戒モード再設定時にEEPROMにドア開が記憶されていれば、直ちにアラームを発生するようにする。
本実施例の装置構成は図1と同様であるので説明を省略し、以下、遠隔始動装置2の作用を図22のフローチャート及び図23、24の動作波形図により説明する。
遠隔始動装置2のマイコン21は、常時図22のフローチャートに示すプログラムを実行しており、このプログラムを開始すると、まず、マイコン21は遠隔始動装置用送信機4から送信コードを受信したか否かを判定し(ステップ101)、送信コードを受信していないと判定した場合、処理を終了し、送信コードを受信していると判定した場合には、受信したIDコードをメモリ(図示せず)に設定登録されている正規IDコードと比較することにより、正規IDコードと一致するか否かを判定する(ステップ102)。受信したIDコードと正規IDコードとが一致しないと判定した場合、マイコン21は処理を終了し、受信したIDコードが正規IDコードと一致したと判定した場合には、受信したファンクションコードにより遠隔始動装置用送信機3からの指令が始動要求か否かを判定する(ステップ103)。
遠隔始動装置2のマイコン21は、常時図22のフローチャートに示すプログラムを実行しており、このプログラムを開始すると、まず、マイコン21は遠隔始動装置用送信機4から送信コードを受信したか否かを判定し(ステップ101)、送信コードを受信していないと判定した場合、処理を終了し、送信コードを受信していると判定した場合には、受信したIDコードをメモリ(図示せず)に設定登録されている正規IDコードと比較することにより、正規IDコードと一致するか否かを判定する(ステップ102)。受信したIDコードと正規IDコードとが一致しないと判定した場合、マイコン21は処理を終了し、受信したIDコードが正規IDコードと一致したと判定した場合には、受信したファンクションコードにより遠隔始動装置用送信機3からの指令が始動要求か否かを判定する(ステップ103)。
遠隔始動装置用送信機3からの指令が始動要求であると判定した場合、マイコン21はエンジン始動条件が成立しているか否かを判定し(ステップ104)、始動条件が成立していない場合、マイコン21は遠隔始動装置用送信機4にアンサーバック1を送信する(ステップ105)。
一方、全ての始動条件が成立している場合、マイコン21は、ACCオン出力(ステップ107)、IGオン出力を行った(ステップ108)後、
図23(c)に示すスタータオン情報をラインL1により盗難防止装置1に出力する(ステップ126)。その後、マイコン21は、100msの時間をおいて、図23(c)に示すように、スタータ(ST)オン出力を行う(ステップ110)。
なお、この100msのディレー時間を設けるのは、後述するように盗難防止装置1のマイコン11が、スタータオン情報を受けて無警戒モードに設定し、EEPROM12にそのモード情報を確実に記憶させるためである。これによって、バッテリ電圧が低下する前に確実にEEPROM12に無警戒モードが記憶される。
一方、全ての始動条件が成立している場合、マイコン21は、ACCオン出力(ステップ107)、IGオン出力を行った(ステップ108)後、
図23(c)に示すスタータオン情報をラインL1により盗難防止装置1に出力する(ステップ126)。その後、マイコン21は、100msの時間をおいて、図23(c)に示すように、スタータ(ST)オン出力を行う(ステップ110)。
なお、この100msのディレー時間を設けるのは、後述するように盗難防止装置1のマイコン11が、スタータオン情報を受けて無警戒モードに設定し、EEPROM12にそのモード情報を確実に記憶させるためである。これによって、バッテリ電圧が低下する前に確実にEEPROM12に無警戒モードが記憶される。
次に、マイコン21はSTオンから3秒経過したか否かを判定し(ステップ111)、3秒経過すると、ST出力をオフした(ステップ112)後、100msの時間をおいて、盗難防止装置1へのスタータオン情報出力を停止する(ステップ127)。この後、マイコン21は、オルタネータL端子41からの入力によりエンジン始動が完了したか否かを判定し(ステップ113)、エンジン始動が完了したと判定すると、始動回数カウンタの値Cを0にした(ステップ114)後、遠隔始動装置用送信機4にアンサーバック2を送信する(ステップ115)。
また、ステップ113でエンジン始動が完了していないと判定すると、マイコン21は始動回数カウンタの値Cに1を加算した(ステップ116)後、始動回数カウンタの値Cが3より大きいか否かを判定する(ステップ117)。始動回数カウンタの値Cが2以下の場合、マイコン21は5秒間のディレー(ステップ128)後、ステップ126に戻って再度エンジン始動を行い、始動回数カウンタの値Cが3より大きい場合には始動回数カウンタの値Cを0にした(ステップ118)後、遠隔始動装置用送信機4にアンサーバック3を送信する(ステップ119)。
これにより、エンジン始動に失敗した場合には、図24に示すように、スタータオン情報、スタータオン信号が最大3回まで出力される。
これにより、エンジン始動に失敗した場合には、図24に示すように、スタータオン情報、スタータオン信号が最大3回まで出力される。
一方、ステップ103で遠隔始動装置用送信機4からの指令が始動要求でないと判定した場合、マイコン21は遠隔始動装置用送信機4からの指令が停止要求であるか否かを判定する(ステップ121)。遠隔始動装置用送信機4からの指令が停止要求でないと判定した場合、マイコン21は処理を終了し、遠隔始動装置用送信機4からの指令が停止要求であると判定した場合、IG出力をオフ(ステップ123)、ACC出力をオフした(ステップ124)後、遠隔始動装置用送信機4にアンサーバック4を送信する(ステップ125)。
次に、盗難防止装置1の作用を図25のフローチャート及び図23、図24の動作波形図により説明するが、図25のフローチャートのステップ271までの作用は図4−1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略し、ステップ271以降の作用について説明する。
マイコン11は遠隔始動装置2からラインL1を介してスタータオン情報を受信しているか否かを判定し(ステップ271)、遠隔始動装置2からスタータオン情報を受信していると判定した場合、RAMに記憶されている動作モードが警戒モードか否かを判定する(ステップ227)。
図23(d)に示すように、動作モードが警戒モードであるときに、スタータオン情報を受信すると、マイコン11はRAMに記憶されている動作モードを無警戒モードに設定した(ステップ228)後、無警戒モード持続タイマの値Tを4秒にセットする(ステップ272)。
図23(d)に示すように、動作モードが警戒モードであるときに、スタータオン情報を受信すると、マイコン11はRAMに記憶されている動作モードを無警戒モードに設定した(ステップ228)後、無警戒モード持続タイマの値Tを4秒にセットする(ステップ272)。
ステップ272でタイマをセットした場合、ステップ271で遠隔始動装置2からスタータオン情報を受信していないと判定した場合、あるいは、ステップ227で動作モードが警戒モードでないと判定した場合には、マイコン11は、持続タイマの値Tが0より大きいか否かを判定し(ステップ230)、タイマの値Tが0より大きいと判定した場合、タイマの値Tを所定時間だけカウントダウンした(ステップ231)後、持続タイマの値TをEEPROM12に記憶する(ステップ232)。
次に、マイコン11は、ドアまたはフードが閉から開になったか否かを判定し(ステップ243)、ドアまたはフードが閉から開になったと判定した場合、EEPROM12にドアまたはフード開情報を記憶する(ステップ244)。ステップ243でドアまたはフードが閉から開になっていないと判定した場合、またはステップ244でドアまたはフード開情報を記憶した後、持続タイマの値Tが0になったか否かを判定し(ステップ234)、持続タイマの値Tが0になった場合、図23(d)に示すように、マイコン11はRAMに記憶されている動作モードを警戒モードに設定する(ステップ235)。
次に、マイコン11は、EEPROM12にドアまたはフード開情報が記憶されているか否かを判定し(ステップ245)、ドアまたはフード開情報が記憶されていないと判定した場合、プログラムを終了し、ドアまたはフード開情報が記憶されていると判定した場合、RAMに記憶されている動作モードを警報モードに設定する(ステップ246)。
なお、イニシャルルーチンのフローチャートは図5と同じであるので、説明を省略する。
なお、イニシャルルーチンのフローチャートは図5と同じであるので、説明を省略する。
この実施例の盗難防止装置は以上のように動作するので、警戒モードにおいて、遠隔始動装置からスタータオン情報を受信すると、ステップ271、227、228で無警戒モードに設定されるとともに、ステップ272で遠隔始動装置がスタータオン信号を出力する時間3秒+バッテリ電圧安定時間1秒の計4秒を無警戒モード継続時間として設定し、ステップ231で無警戒持続タイマTの計数を開始する。この無警戒持続タイマTの値はステップ232でEEPROM12に記憶されるとともに、設定された無警戒モード情報はステップ219、220でEEPROM12に記憶される。
この4秒間の無警戒状態においては、ステップ243でドアまたはフードの状態を検出しており、閉→開状態を検出するとその情報がステップ244でEEPROM12に記憶される。
この4秒間の無警戒状態においては、ステップ243でドアまたはフードの状態を検出しており、閉→開状態を検出するとその情報がステップ244でEEPROM12に記憶される。
そして、無警戒モード持続時間4秒が経過すると、ステップ235で警戒モードに再設定される。このとき、ステップ245でEEPROM12の記憶内容をチェックし、ドア開情報が記憶されていれば、この4秒間の間に泥棒がドアまたはフードを開けたことを示すため、ステップ246で警報モードに設定され、直ちにアラームが発生する。
また、もし、1回目のスタータオン信号でエンジンが始動できなかった場合は、所定時間後に2回目のスタータオン信号、及びスタータオン情報が出力されるため、上記の動作が最大3回繰り返される。
また、遠隔始動によりバッテリ電圧が低下→復帰して盗難防止装置のマイコンが一旦リセットされた後起動されると、イニシャルルーチンのステップ302でEEPROM12の記憶内容がチェックされるが、このときはエンジン始動が行われる前にすでに記憶内容が無警戒モードに変わっているために警報モードに移行しない。
このとき、無警戒モード持続タイマも起動前に計数を開始し、0より大きい値がEEPROM12に記憶されているため、ステップ230、231でタイマTは計数を続け、4秒経過で元の警戒モードに戻される。
また、遠隔始動によりバッテリ電圧が低下→復帰して盗難防止装置のマイコンが一旦リセットされた後起動されると、イニシャルルーチンのステップ302でEEPROM12の記憶内容がチェックされるが、このときはエンジン始動が行われる前にすでに記憶内容が無警戒モードに変わっているために警報モードに移行しない。
このとき、無警戒モード持続タイマも起動前に計数を開始し、0より大きい値がEEPROM12に記憶されているため、ステップ230、231でタイマTは計数を続け、4秒経過で元の警戒モードに戻される。
なお、この実施例においても、上記の実施例と同様に、遠隔始動による無警戒モード設定中にドア開を検出すると、直ちにアラームを発生させたり、実施例6のように第1警戒モードと第2警戒モードを備え、スタータオン信号出力中は第2警戒モードに設定し、スタータオン信号出力終了後は第1警戒モードに再設定するようにしてもよい。
また、第1警戒モードと第2警戒モードを備え、スタータオン信号出力が出力されるとエンジンが停止するまで、第2警戒モードに設定することも可能である。
また、第1警戒モードと第2警戒モードを備え、スタータオン信号出力が出力されるとエンジンが停止するまで、第2警戒モードに設定することも可能である。
さらに、以上の実施例では、遠隔始動装置と盗難防止装置との間で通信ラインLを介して通信を行ったが、遠隔始動装置と盗難防止装置との間で通信を行わないシステムとすることも可能である。
図26は遠隔始動装置と盗難防止装置との間で通信を行わないシステムの実施例を示すブロック図であり、イグニッションキーシリンダー(図示せず)にキーが挿入されたことを検出するキー挿入SW43、、スタータモータ45を駆動するためのスタータSW44の出力及び遠隔始動装置2からのIGオン信号、スタータオン信号が盗難防止装置1に入力されているが、その他の構成は図1と同様であるので、詳細な説明を省略する。
図26は遠隔始動装置と盗難防止装置との間で通信を行わないシステムの実施例を示すブロック図であり、イグニッションキーシリンダー(図示せず)にキーが挿入されたことを検出するキー挿入SW43、、スタータモータ45を駆動するためのスタータSW44の出力及び遠隔始動装置2からのIGオン信号、スタータオン信号が盗難防止装置1に入力されているが、その他の構成は図1と同様であるので、詳細な説明を省略する。
また、図1においても同様であるが、IGライン51にはエンジン制御装置53が接続されている。エンジン制御装置53は、イグニッションスイッチ35のオン、または遠隔始動装置2からIGライン51にIGオン出力がなされることにより電源が供給されて動作を開始する。その後、スタータスイッチ44のオンまたは遠隔始動装置2からスタータライン50にスタータオン出力、すなわち、スタータモータ駆動信号の出力がなされると、スタータモータ45がエンジンを駆動する。エンジン制御装置53はエンジンの回転を検出して燃料供給制御、点火制御を開始し、これによりエンジン始動がなされる。
図27に示すフローチャートは、図26の盗難防止装置1の作用を示すフローチャートであるが、図27のフローチャートのステップ271までの作用は図4−1に示すフローチャートの作用と同じであるので、フローチャート及びその説明を省略する。
さらに、図27のフローチャートのステップ227〜246の作用は図25に示すフローチャートの作用と同じであるので、ステップ227〜246までの説明も省略する。
ステップ271で遠隔始動装置2からスタータライン50を介してスタータオン信号を受信しているか否かを判定し、遠隔始動装置2からスタータオン信号を受信していると判定した場合、マイコン11はキー挿入SW43の出力によりイグニッションキーシリンダーにキーが挿入されているか否かを判定し(ステップ273)、キーが挿入されていない(キーなし)と判定した場合、すなわち、遠隔始動装置2がスタータモータ駆動信号を出力したと判定した場合には、RAMに記憶されている動作モードが警戒モードか否かを判定する(ステップ227)。
さらに、図27のフローチャートのステップ227〜246の作用は図25に示すフローチャートの作用と同じであるので、ステップ227〜246までの説明も省略する。
ステップ271で遠隔始動装置2からスタータライン50を介してスタータオン信号を受信しているか否かを判定し、遠隔始動装置2からスタータオン信号を受信していると判定した場合、マイコン11はキー挿入SW43の出力によりイグニッションキーシリンダーにキーが挿入されているか否かを判定し(ステップ273)、キーが挿入されていない(キーなし)と判定した場合、すなわち、遠隔始動装置2がスタータモータ駆動信号を出力したと判定した場合には、RAMに記憶されている動作モードが警戒モードか否かを判定する(ステップ227)。
また、ステップ274でIGオン信号が出力されているか否かを判定し、IGオン信号が出力されていると判定した場合、マイコン11はキー挿入SW43の出力によりキー有りか否かを判定し(ステップ275)、キー有りと判定した場合には、RAMに記憶されている動作モードを無警戒モードに設定する(ステップ276)。
以上のように、キーなしスタータオン信号を検出すると、遠隔始動装置がスタータオン信号を出力したと判断し、無警戒モードに設定することができる。また、キー有りスタータオン信号を検出すると、人がイグニッションキーでスタータスイッチ44をオンしてスタータオン信号を出力したと判断し、無警戒モードには移行しない。この場合、通常、車両に乗り込む際に盗難防止装置は送信機で無警戒状態にされているためなんら制御は行われない。
このようにすれば、特に遠隔始動装置との間で通信を行う必要がなく、構成を簡単にすることができる。
このようにすれば、特に遠隔始動装置との間で通信を行う必要がなく、構成を簡単にすることができる。
また、ステップ274〜276により、盗難防止装置はキー有りの状態でIGオンになると、人がイグニッションキーでIGオンしたことを示すため、無警戒モードとなり、この状態でスタータオン信号が出力されても、盗難防止装置は何ら動作しない。なお、盗難防止装置がIGオンで無警戒モードに移行しない設定の場合には、ステップ274〜276は不要である。
1 盗難防止装置
11 マイコン
12 EEPROM
2 遠隔始動装置
21 マイコン
3 盗難防止用送信機
4 遠隔始動装置用送信機
31 カーテシSW
32 フードSW
33 侵入センサ
34 振動センサ
35 IGSW
36 ロックポジションSW
37 ロックモータ
38 サイレン
39 ハザードランプ
40 モニタランプ
41 オルタネータL端子
42 バッテリ
43 キー挿入SW
44 スタータSW
45 スタータモータ
50 スタータライン
51 IGライン
52 ACCライン
53 エンジン制御装置
11 マイコン
12 EEPROM
2 遠隔始動装置
21 マイコン
3 盗難防止用送信機
4 遠隔始動装置用送信機
31 カーテシSW
32 フードSW
33 侵入センサ
34 振動センサ
35 IGSW
36 ロックポジションSW
37 ロックモータ
38 サイレン
39 ハザードランプ
40 モニタランプ
41 オルタネータL端子
42 バッテリ
43 キー挿入SW
44 スタータSW
45 スタータモータ
50 スタータライン
51 IGライン
52 ACCライン
53 エンジン制御装置
Claims (20)
- 遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジン始動完了後に再び警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - 請求項1または請求項2に記載された盗難防止装置において、
前記制御手段が、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、直ちに警戒モードに設定することを特徴とする盗難防止装置。 - 請求項1〜請求項3のいずれかに記載された盗難防止装置において、
前記制御手段が、前記無警戒モードから再び警戒モードにするときは、通常の警戒モード移行条件を採用しないことを特徴とする盗難防止装置。 - 請求項1〜請求項3のいずれかに記載された盗難防止装置において、
前記制御手段が前記無警戒モードにするとき、及び/または再び警戒モードにするときは、アンサーバックを行わないことを特徴とする盗難防止装置。 - 請求項1または請求項2に記載された盗難防止装置において、
前記制御手段が、遠隔始動による無警戒モード中に盗難センサが盗難を検出した場合は、直ちにアラームを発生させることを特徴とする盗難防止装置。 - 請求項1または請求項2に記載された盗難防止装置において、
前記制御手段が、遠隔始動による無警戒モード中であっても、盗難センサにより盗難を検出し、再び警戒モードに設定されたときに、遠隔始動による無警戒モード中に前記盗難センサが盗難を検出していた場合、アラームを発生させることを特徴とする盗難防止装置。 - 請求項3、請求項6または請求項7に記載された盗難防止装置において、
前記制御手段が、盗難センサのうち、車両振動により出力を生じるセンサには応答しないことを特徴とする盗難防止装置。 - セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に前記メモリの記憶内容を強制的に無警戒モードに変更し、エンジン始動完了後に再び前記メモリの記憶内容を警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - 請求項1〜請求項9のいずれかに記載された盗難防止装置において、
前記制御手段が、無警戒モードから警戒モードへの移行を、エンジンが停止してから行うことを特徴とする盗難防止装置。 - 請求項1〜請求項10のいずれかに記載された盗難防止装置において、
警戒モードの間、警戒中であることを報知する報知手段を備え、
当該報知手段が遠隔始動により無警戒モードになった場合は、その間も報知を行うことを特徴とする盗難防止装置。 - 遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにするとともに、所定の無警戒モード時間経過後に再び警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにするとともに、無警戒モード情報と無警戒モード持続時間情報を前記不揮発性メモリに記憶し、所定の無警戒モード時間経過後に再び警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - 遠隔エンジン始動装置を搭載した車両に設けられるとともに、全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定する盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後、または停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする盗難防止装置。 - 全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定するとともに、セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が第1警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に第2警戒モードにし、エンジンの始動が完了した後またはエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする盗難防止装置。 - 遠隔エンジン始動装置を搭載した車両に設けられるとともに、全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定する盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする盗難防止装置。 - 全ての盗難センサに応答してアラームを発生させる第1警戒モードと、所定の盗難センサに応答してアラームを発生させる第2警戒モードとを備え、送信機による警戒モード移行時は第1警戒モードに設定するとともに、セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が第1警戒モードであればアラームを発生させる起動時警報機能を備えた盗難防止装置において、
第1警戒モード中に遠隔エンジン始動指令を受けたとき、エンジン始動を行う前に無警戒モードにし、エンジンの始動が完了した後に第2警戒モードにし、更にエンジンが停止した後に第1警戒モードに戻す制御手段を備えたことを特徴とする盗難防止装置。 - 遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動装置がスタータモータ駆動信号を出力するとき、該駆動信号出力中は無警戒モードにし、該駆動信号出力終了後に再び警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - セキュリティの動作モードを不揮発性メモリに記憶し、盗難防止装置の起動時に当該メモリの記憶内容が警戒モードであればアラームを発生させる起動時警報機能を備えるとともに、遠隔エンジン始動装置を搭載した車両に設けられる盗難防止装置において、
警戒モード中に遠隔エンジン始動装置がスタータモータ駆動信号を出力するとき、該駆動信号出力中は無警戒モードにし、該駆動信号出力終了後に再び警戒モードに設定する制御手段を備えたことを特徴とする盗難防止装置。 - 請求項18または請求項19に記載された盗難防止装置において、
前記制御手段がイグニッションキーシリンダーにキーが挿入されていない状態でスタータ駆動信号が出力されたとき、遠隔始動装置がスタータモータ駆動信号を出力したと判断することを特徴とする盗難防止装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005213854A JP2006199268A (ja) | 2004-12-24 | 2005-07-25 | 盗難防止装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004372451 | 2004-12-24 | ||
| JP2005213854A JP2006199268A (ja) | 2004-12-24 | 2005-07-25 | 盗難防止装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006199268A true JP2006199268A (ja) | 2006-08-03 |
Family
ID=36957625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005213854A Pending JP2006199268A (ja) | 2004-12-24 | 2005-07-25 | 盗難防止装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006199268A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008056167A (ja) * | 2006-09-01 | 2008-03-13 | Denso Corp | 遠隔エンジンスタート装置 |
| JP2008230533A (ja) * | 2007-03-23 | 2008-10-02 | Fuji Heavy Ind Ltd | 車両盗難防止装置 |
| JP2008279971A (ja) * | 2007-05-14 | 2008-11-20 | Fuji Heavy Ind Ltd | 車両盗難防止装置 |
| CN108240841A (zh) * | 2016-12-27 | 2018-07-03 | 深圳前海明磊融创科技有限公司 | 车载设备监测方法和装置 |
| CN113313918A (zh) * | 2021-05-12 | 2021-08-27 | 深圳市云伽智能技术有限公司 | 终端防拆报警识别方法、装置、计算机设备及存储介质 |
| CN119428541A (zh) * | 2024-12-04 | 2025-02-14 | 重庆赛力斯凤凰智创科技有限公司 | 车辆防盗报警误触发检测方法、装置、车辆及电子设备 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000071940A (ja) * | 1998-08-28 | 2000-03-07 | Nissan Motor Co Ltd | 車両用盗難警報装置 |
| JP2002079911A (ja) * | 2000-07-05 | 2002-03-19 | Denso Corp | 車両用盗難防止装置 |
-
2005
- 2005-07-25 JP JP2005213854A patent/JP2006199268A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000071940A (ja) * | 1998-08-28 | 2000-03-07 | Nissan Motor Co Ltd | 車両用盗難警報装置 |
| JP2002079911A (ja) * | 2000-07-05 | 2002-03-19 | Denso Corp | 車両用盗難防止装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008056167A (ja) * | 2006-09-01 | 2008-03-13 | Denso Corp | 遠隔エンジンスタート装置 |
| JP2008230533A (ja) * | 2007-03-23 | 2008-10-02 | Fuji Heavy Ind Ltd | 車両盗難防止装置 |
| JP2008279971A (ja) * | 2007-05-14 | 2008-11-20 | Fuji Heavy Ind Ltd | 車両盗難防止装置 |
| CN108240841A (zh) * | 2016-12-27 | 2018-07-03 | 深圳前海明磊融创科技有限公司 | 车载设备监测方法和装置 |
| CN113313918A (zh) * | 2021-05-12 | 2021-08-27 | 深圳市云伽智能技术有限公司 | 终端防拆报警识别方法、装置、计算机设备及存储介质 |
| CN113313918B (zh) * | 2021-05-12 | 2022-07-12 | 深圳市云伽智能技术有限公司 | 终端防拆报警识别方法、装置、计算机设备及存储介质 |
| CN119428541A (zh) * | 2024-12-04 | 2025-02-14 | 重庆赛力斯凤凰智创科技有限公司 | 车辆防盗报警误触发检测方法、装置、车辆及电子设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5977654A (en) | Anti-theft System for disabling a vehicle engine that includes a multi-contact switch for disconnecting the battery and loading the vehicle electrical system | |
| US5965954A (en) | Anti-theft system for disabling a vehicle engine | |
| JP4136649B2 (ja) | 車両用盗難防止装置及び車両の制御方法 | |
| US5654688A (en) | Vehicle security system having enhanced remote transmitter security | |
| US6028505A (en) | Electronic vehicle security system with remote control | |
| JP4687779B2 (ja) | 車両用ドアロックシステム、キーレスエントリーシステム、ロック制御方法 | |
| EP1170181A2 (en) | Anti-theft system for vehicles having remote-controlled engine starting function | |
| US5612669A (en) | Vehicle security system having enhanced false alarm compensation | |
| JP4289938B2 (ja) | 盗難防止装置、及び盗難防止方法 | |
| US7599764B2 (en) | Vehicle remote starting apparatus and method for executing registration process | |
| JP2009255836A (ja) | 遠隔始動装置、遠隔始動システム、及び遠隔始動方法 | |
| JP3503614B2 (ja) | 車両用盗難防止装置 | |
| JP2006199268A (ja) | 盗難防止装置 | |
| US5739749A (en) | Forced passive anti-hijack security system | |
| CN100434674C (zh) | 车辆发动机控制系统和方法 | |
| JP2003097123A (ja) | 車両用ドアアンロックシステム | |
| US7649443B2 (en) | Antitheft apparatus | |
| JP2005112178A (ja) | 車両用監視装置 | |
| JP4441452B2 (ja) | 車両用盗難警報装置 | |
| JP4744272B2 (ja) | 盗難防止システム及び遠隔エンジン始動装置 | |
| JP2001349108A (ja) | リモートコントロールシステム | |
| JP2007313989A (ja) | 車両用異常検知装置 | |
| JPH0546535Y2 (ja) | ||
| JPH0634190Y2 (ja) | セキュリティ装置 | |
| JP2007055337A (ja) | 車両用盗難防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080718 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101221 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110426 |