JP2006200422A - 自動変速機の制御装置 - Google Patents
自動変速機の制御装置 Download PDFInfo
- Publication number
- JP2006200422A JP2006200422A JP2005012187A JP2005012187A JP2006200422A JP 2006200422 A JP2006200422 A JP 2006200422A JP 2005012187 A JP2005012187 A JP 2005012187A JP 2005012187 A JP2005012187 A JP 2005012187A JP 2006200422 A JP2006200422 A JP 2006200422A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- torque
- engagement
- pressure
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Transmission Device (AREA)
Abstract
【課題】 アイドルストップ後のエンジン再始動時に、経時劣化等により十分な油量を確保できない場合であっても、違和感のない発進が可能な自動変速機の制御装置を提供する。
【解決手段】 締結圧制御手段は、締結フェーズにおける発進クラッチの締結容量を上回らないようエンジンのトルクダウン指令をエンジンコントロールユニットに出力し、締結フェーズ終了後のタービン回転数と変速機入力軸回転数との差が所定値以上の場合、以降のエンジントルク制限量を所定値以上とするエンジンのトルクダウン指令を出力することとした。
【選択図】 図4
【解決手段】 締結圧制御手段は、締結フェーズにおける発進クラッチの締結容量を上回らないようエンジンのトルクダウン指令をエンジンコントロールユニットに出力し、締結フェーズ終了後のタービン回転数と変速機入力軸回転数との差が所定値以上の場合、以降のエンジントルク制限量を所定値以上とするエンジンのトルクダウン指令を出力することとした。
【選択図】 図4
Description
本発明は、アイドルストップ制御を備えた自動変速機の制御装置に関し、特にベルト式無段変速機の制御装置に関する。
アイドルストップ制御を備えた自動変速機の制御装置として、特許文献1に記載の技術が開示されている。この公報には、エンジン再始動後のエンジン回転数が所定値以上になったことでプリチャージフェーズの終了を検出し、締結フェーズに移行することで発進クラッチの締結制御(所謂N−Dセレクト制御)を行っている。
特開2000−266172号公報
ここで、発進クラッチに充填される油量は、ポンプ容積効率の回転数依存性や、各種バルブリークの大小による影響を受けるため、充填された油量を正確に予測することが難しい。また、充填された油量はオイルポンプやバルブ系の経時劣化に大幅に影響されるという問題がある。よって、特許文献1に記載の技術では、単にエンジン回転数によってプリチャージフェーズの終了を予測しただけでは、実際には十分に発進クラッチに油が充填されているかどうか疑わしい。一般に、N−Dセレクト制御時において、エンジンの回転数は、発進クラッチの締結が完了するまではアイドル回転数に保つ制御が行われる。この状態で発進クラッチの初期充填量が不十分のまま締結フェーズに入ると、締結が完了するまでに時間が掛かり、特に再始動後、すぐにアクセルペダルを踏み込み、全開発進した場合には、前進クラッチが急激に締結して、大きな発進ショックが発生するおそれがあった。
本発明は、上記問題に着目してなされたもので、アイドルストップ後のエンジン再始動時に、経時劣化等により十分な油量を確保できない場合であっても、違和感のない発進が可能な自動変速機の制御装置を提供することを目的とする。
上記目的を達成するため、本発明では、エンジンにより駆動されるオイルポンプと、車両発進時に前記オイルポンプを油圧源とする締結圧により締結される発進クラッチと、該発進クラッチの解放状態から締結状態に移行する際、締結圧制御を締結フェーズを経て行う締結圧制御手段と、車両停車時であって、かつ、所定の条件が成立したときはエンジンを停止し、前記所定の条件が不成立となったときはエンジンを再始動するアイドルストップ制御手段と、を備えた自動変速機の制御装置において、前記締結圧制御手段は、前記締結フェーズにおける前記発進クラッチの締結容量を上回らないようエンジンのトルクダウン指令をエンジンコントロールユニットに出力し、前記締結フェーズ終了後のタービン回転数と変速機入力軸回転数との差が所定値以上の場合、以降のエンジントルク制限量を所定値以上とするエンジンのトルクダウン指令を出力することとした。
アイドルストップ後のエンジン再始動時に、発進クラッチに実際に充填される油量を精度良く推定でき、この油量に基づいて発進クラッチの締結制御を変更することで、クラッチ締結タイミングの遅れを防止することが可能となり、違和感のない発進を達成できる。
以下、本発明の自動変速機の制御装置を実現する最良の形態を、図面に示す実施例に基づいて説明する。
図1は実施例1におけるベルト式無段変速機3(以下CVTと記載する)を備えた自動変速機の制御系を表す図である。
1はトルクコンバータ、2はロックアップクラッチ、3はCVT、4はプライマリ回転数センサ、4aはタービン回転数センサ、5はセカンダリ回転数センサ、6は油圧コントロールバルブユニット、8はエンジンにより駆動されるオイルポンプ、9はCVTコントロールユニット、10はアクセル開度センサ、11は油温センサ、12はステアリングホイールの操舵角度を検出する舵角センサ、13はアイドルストップスイッチ、14は車速センサ、15はブレーキペダルのON・OFFを検出するブレーキスイッチ、16はライン圧を検出するライン圧センサ、17はアイドルストップコントロールユニット、18はエンジンコントロールユニット、19はエンジン、19aはスタータモータ、19bはエンジン出力軸である。
エンジン出力軸19bには、オイルポンプ8と、回転伝達機構としてトルクコンバータ1が連結されるとともに、エンジン19とCVT3を直結するロックアップクラッチ2が備えられている。トルクコンバータ1の出力側にはタービンシャフト1aが接続され、このタービンシャフト1aは前後進切換機構20のリングギア21と連結されている。前後進切換機構20は、タービンシャフト1aと連結したリングギア21,ピニオンキャリア22,変速機入力軸1bと連結したサンギア23からなる遊星歯車機構から構成されている。ピニオンキャリア22には、変速機ケースにピニオンキャリア22を固定する後進ブレーキ24と、変速機入力軸1bとピニオンキャリア22を一体に連結する前進クラッチ25(発進クラッチ)が設けられている。
変速機入力軸1bの端部にはCVT3のプライマリプーリ30aが設けられている。CVT3は、上記プライマリプーリ30aとセカンダリプーリ30bと、プライマリプーリ30aの回転力をセカンダリプーリ30bに伝達するベルト34等からなっている。プライマリプーリ30aは、変速機入力軸1bと一体に回転する固定円錐板31と、固定円錐板31に対向配置されてV字状プーリ溝を形成するとともにプライマリプーリシリンダ室33に作用する油圧によって変速機入力軸1bの軸方向に移動可能である可動円錐板32からなっている。
セカンダリプーリ30bは、従動軸38上に設けられている。セカンダリプーリ30bは、従動軸38と一体に回転する固定円錐板35と、固定円錐板35に対向配置されてV字状プーリ溝を形成するとともにセカンダリプーリシリンダ室37に作用する油圧によって従動軸38の軸方向に移動可能である可動円錐板36とからなっている。
従動軸38には図示しない駆動ギアが固着されており、この駆動ギアはアイドラ軸に設けられたピニオン、ファイナルギア、差動装置を介して図外の車輪に至るドライブシャフトを駆動する。
上記のようなCVT3にエンジン出力軸12から入力された回転力は、トルクコンバータ1及び前後進切換機構20を介して変速機入力軸1bに伝達される。変速機入力軸1bの回転力はプライマリプーリ30a,ベルト34,セカンダリプーリ30b,従動軸38,駆動ギア,アイドラギア,アイドラ軸,ピニオン,及びファイナルギアを介して差動装置に伝達される。
上記のような動力伝達の際に、プライマリプーリ30aの可動円錐板32及びセカンダリプーリ30bの可動円錐板36を軸方向に移動させてベルト34との接触位置半径を変えることにより、プライマリプーリ30aとセカンダリプーリ30bとの間の回転比つまり変速比を変えることができる。このようなV字状のプーリ溝の幅を変化させる制御は、CVTコントロールユニット9を介してプライマリプーリシリンダ室33またはセカンダリプーリシリンダ室37への油圧制御により行われる。
CVTコントロールユニット9には、タービン回転数センサ4aからのタービン回転数Nt、スロットル開度センサ10からのスロットル開度TVO、油温センサ11からの変速機内油温f、プライマリ回転数センサ4からのプライマリ回転数Npri、セカンダリ回転数センサ5からのセカンダリ回転数Nsec、ライン圧センサ16からのライン圧等が入力される。この入力信号を元に制御信号を演算し、油圧コントロールバルブユニット6へ制御信号を出力する。
油圧コントロールバルブユニット6へは、CVTコントロールユニット9からの制御信号が入力され、プライマリプーリシリンダ室33とセカンダリプーリシリンダ室37へ制御圧を供給することで変速制御を行う。
アイドルストップコントロールユニット17には、舵角センサ12、アイドルストップスイッチ13、車速センサ14、ブレーキスイッチ15からのセンサ信号が入力されるとともに、CVTコントロールユニット9と相互にセンサ信号やトルクダウン制御信号等を通信している。アイドルストップコントロールユニット17によりアイドルストップと判断されると、エンジンコントロールユニット18に対してアイドリングを停止する指令が出力される。
また、アイドルストップ後のエンジン再始動と判断されると、エンジンコントロールユニット18に対してエンジン再始動指令が出力され、エンジンコントロールユニット18は、スタータモータ19aにモータ駆動信号を出力し、エンジン19を始動する。
なお、アイドルストップコントロールユニット17から出力されるアイドルストップ指令等を、例えば、ブレーキユニットに設けられたヒルホールド制御部等に出力し、傾斜路面等でのアイドルストップ時に、車両の後退を防止するよう構成してもよい。また、再始動時には、前進クラッチ25の締結状態に応じたトルクダウン量が入力され、このトルクダウン量に応じたエンジン出力状態に制御するよう構成されている。
図2は実施例1におけるベルト式無段変速機の油圧回路を表す回路図である。プレッシャレギュレータバルブ40は油路8aから供給されたオイルポンプ8の吐出圧を、ライン圧(プーリクランプ圧)として調圧する。油路8aには油路8bが連通している。油路8bはCVT3のプライマリプーリシリンダ室33及びセカンダリプーリシリンダ室37に、ベルト34をクランプするプーリクランプ圧を供給するプーリクランプ圧供給油路である。また、油路8bに連通した油路8eは、パイロットバルブ50の元圧を供給する。
クラッチレギュレータバルブ45はプレッシャレギュレータバルブ40からドレンされた油圧を元圧として前進クラッチ圧を調圧する。プレッシャレギュレータバルブ40とクラッチレギュレータバルブ45は油路41を介して連通している。また、油路41には、ライン圧油路8cと連通するとともに、オリフィス8fを有する油路8dが連通している。また、油路41には、クラッチレギュレータバルブ45により調圧された油圧をセレクトスイッチングバルブ75及びセレクトコントロールバルブ90へ供給する油路42が連通している。
パイロットバルブ50は油路51を介してロックアップソレノイド71及びセレクトスイッチングソレノイド70への一定供給圧を設定する。セレクトスイッチングソレノイド70の出力圧は油路70aからセレクトスイッチングバルブ75に供給され、セレクトスイッチングバルブ75の作動を制御する。ロックアップソレノイド71の出力圧は油路71aからセレクトスイッチングバルブ75に供給される。
セレクトスイッチングソレノイド70の信号がONの状態では、ロックアップソレノイド71の信号圧は、セレクトスイッチングバルブ75を介してセレクトコントロールバルブ90の信号圧として作用する。また、セレクトスイッチングソレノイド70の信号がOFFされた状態では、ロックアップソレノイド71の信号圧は、セレクトスイッチングバルブ75を介して図外のロックアップコントロールバルブに導出される。
セレクトスイッチングソレノイド70の信号がゼロであって、ロックアップソレノイド71の信号もゼロの状態では、セレクトコントロールバルブ90への信号圧がゼロの状態となる。このとき、セレクトコントロールバルブ90のリターンスプリング91のバネ荷重によりスプールバルブ92を図中右方に移動させる。
プレッシャレギュレータバルブ40及びクラッチレギュレータバルブ45は、ともにプレッシャモディファイヤ圧によって調圧される。このプレッシャモディファイヤ圧は、ライン圧が供給されたプレッシャモディファイヤバルブ73をライン圧ソレノイド72によって調圧する信号圧であり、ソレノイド70,71,72による信号圧よりも高い信号圧として調圧する。
このソレノイド72による信号圧よりも高い信号圧により調圧することで、高圧領域における調圧性能の向上を図っている(第2締結手段に対応)。一方、ソレノイド71による信号圧によって調圧される圧は、低圧領域においてきめ細やかな調圧を可能としているが、調圧可能な最大圧は限られている(締結圧手段に対応)。
実施例1の前進クラッチ25締結制御にあっては、完全締結状態に移行してからの締結圧制御はクラッチレギュレータバルブ45によって行い、完全締結状態に移行する前の例えば発進時締結制御等にあっては、ロックアップソレノイド71による締結圧制御を実行する。前進クラッチ25解放状態から締結制御を行う際には、セレクトスイッチングソレノイド70をONとすることで、油路42と油路77を非連通状態とし、油路42の油圧はセレクトコントロールバルブ90を経由して油路77に供給されるよう構成する。同時に、ロックアップソレノイド71の信号圧は、図外のロックアップコントロールバルブとは非連通状態とし、セレクトコントロールバルブ90の対向圧として供給されるよう構成する。これにより、ロックアップソレノイド71の信号圧はセレクトコントロールバルブ90によって油路42の前進クラッチ25の締結圧を制御する。これにより、クラッチレギュレータバルブ45よりもきめ細かな締結圧制御が可能となる。
上記締結制御が終了すると、セレクトスイッチングソレノイド70及びロックアップソレノイド71をOFFとし、油路42と油路77を連通することで、前進クラッチ25の締結圧はクラッチレギュレータバルブ45で調圧された締結圧がそのまま供給されるものとする。実施例1では、上述したように前進クラッチ25の締結制御を切り換える構成を、元圧切換タイプと定義する。
図3は実施例1におけるアイドルストップ制御の基本制御内容を表すフローチャートである。
ステップ101では、アイドルストップ許可フラグがONで、アイドルストップスイッチが通電、車速が0、ブレーキスイッチがON、舵角が0かどうか等を判断し、全ての条件を満たしたときのみステップ102へ進み、それ以外はアイドルストップ制御を無視する。
ステップ102では、セレクト位置が走行レンジかどうかを判定し、走行レンジであればステップ103へ進み、それ以外はステップ104へ進む。
ステップ103では、油温Toilが下限油温Tlowよりも温度が高く上限油温Thiよりも低いかどうかを判定し、条件を満たしていればステップ104へ進み、それ以外はステップ101へ進む。
ステップ104では、エンジン10を停止する。
ステップ105では、ブレーキスイッチ2がOFFかどうかを判定し、OFF状態であればステップ106へ進む。
ステップ106では、エンジン再始動制御を実行する。
すなわち、運転者がアイドルストップ制御を希望しており、車両が停止状態で、ブレーキが踏まれており、舵角が0あれば、エンジンを停止する。ここで、アイドルストップスイッチは、運転者がアイドルストップを実行又は解除する意志を伝えるものである。イグニッションキーを回した時点でこのスイッチは通電状態である。また、舵角が0の場合としたのは、例えば右折時等の走行時の一時停車時においては、アイドルストップを禁止するためである。
なお、アイドルストップ許可フラグとは、他の制御ロジック等によって設定され、アイドルストップを行ったとしても、好ましくないエンジン再始動制御が達成できないような場合に設定される。具体的には、後述する前進クラッチ25の締結制御がうまくいかない場合や、バッテリの充電量不足によりスタータモータ19aを駆動できない場合等が挙げられるが特に限定しない。
次に、油温Toilが下限油温Tlowよりも高く、上限油温Thiよりも低いかどうかを判定する。これは、油温が所定温度以上でないと、油の粘性抵抗のために、エンジン完爆前に所定油量の充填ができない可能性があるためである。また、油温が高温状態では、粘性抵抗の低下によりオイルポンプ8の容積効率が低下することと、バルブ各部のリーク量が増加するため、同様にエンジン完爆前に締結要素への所定油量が充填できない可能性があるためである。
次に、ブレーキが離されたときは、運転者にエンジン始動の意志があると判断し、また、ブレーキが踏まれた状態であっても、アイドルストップスイッチに非通電が確認されるときは、運転者にエンジン始動の意志があると判断する。これは、例えばアイドルストップによりエンジンを停止すると、バッテリに負担がかかり、エアコン等の使用ができないといった事が生じないように、運転者が車室内の温度を暑いと感じたときには、運転者の意志によってアイドルストップ制御を解除することができることで、より運転者の意図に沿った制御を実行できるように構成されているものである。
運転者にエンジン始動の意志があると判断したときは、スタータモータ19aを作動することでエンジンを再始動する。
エンジン停止時はオイルポンプ8が停止した状態であるため、前進クラッチ25及びCVT3の各プーリシリンダ室33,37に供給されている油も油路から抜け、油圧が低下してしまう。そのため、エンジンが再始動されるときには、前進クラッチ25もその係合状態が解かれてしまった状態となっているため、エンジン再始動時に油圧を供給する必要がある。なお、各プーリシリンダ室33,37に貯留された油は、アイドルストップ時間が短いときにはさほど抜けることはなく、ある程度の油量が確保されており、長時間停車した場合には徐々に油が抜けるよう構成されている。
[エンジン再始動制御]
次に、前進クラッチ締結制御について説明する。基本的に、前進クラッチ25を締結するときは、クラッチプレートのガタや皿ばね等を押し潰し、クラッチピストンストロークが終了するまでの状態をプリチャージフェーズと定義し、クラッチピストンストロークが終了した状態を締結フェーズと定義する。締結フェーズ終了後未だクラッチプレートのスリップ状態が解消されない状態を締結終了フェーズと定義し、クラッチプレートのスリップが解消され、完全締結に移行する状態を完全締結フェーズと定義する。
次に、前進クラッチ締結制御について説明する。基本的に、前進クラッチ25を締結するときは、クラッチプレートのガタや皿ばね等を押し潰し、クラッチピストンストロークが終了するまでの状態をプリチャージフェーズと定義し、クラッチピストンストロークが終了した状態を締結フェーズと定義する。締結フェーズ終了後未だクラッチプレートのスリップ状態が解消されない状態を締結終了フェーズと定義し、クラッチプレートのスリップが解消され、完全締結に移行する状態を完全締結フェーズと定義する。
[エンジン再始動制御処理]
図4は、アイドルストップコントロールユニット17において実行されるエンジン再始動制御の流れを示すフローチャートである。以下、各ステップSについて説明する。
図4は、アイドルストップコントロールユニット17において実行されるエンジン再始動制御の流れを示すフローチャートである。以下、各ステップSについて説明する。
ステップS200では、セレクト位置が走行レンジかどうかを判別し、YESであればステップS220へ移行し、NOであればステップS210へ移行する。
<スタータモータ駆動制御処理>
ステップS240〜S242では、スタータモータの駆動制御処理の流れを示す。
ステップS240〜S242では、スタータモータの駆動制御処理の流れを示す。
ステップS240では、エンジンが完爆したかどうかが判断され、YESであればステップS242へ移行し、NOであればステップS241へ移行する。なお、完爆判定は、エンジン回転数が所定回転数以上かどうかを判定すればよく特に限定しない。
ステップS241では、スタータモータを駆動し、ステップS240へ戻る。
ステップS242では、スタータモータを停止し、制御を終了する。
<前進クラッチ締結状態判断制御処理>
ステップS220〜S218までは、前進クラッチ25の締結状態がプリチャージフェーズ、締結フェーズ、及び締結終了フェーズのいずれに相当するかを判断する制御処理の流れを示す。
ステップS220〜S218までは、前進クラッチ25の締結状態がプリチャージフェーズ、締結フェーズ、及び締結終了フェーズのいずれに相当するかを判断する制御処理の流れを示す。
ステップS210では、セレクトスイッチングソレノイド70をONとし、制御を終了する。
<トルクダウン制御処理>
ステップS220〜S234では、前進クラッチの締結状態に応じたエンジントルクダウン制御処理の流れを示す。
ステップS220〜S234では、前進クラッチの締結状態に応じたエンジントルクダウン制御処理の流れを示す。
ステップS220では、セレクトスイッチングソレノイド70をONとし、ステップS221へ移行する。
ステップS221では、フェーズタイマによりエンジン始動からの時間計測を開始し、ステップS222へ移行する。
(プリチャージフェーズ)
ステップS222では、前進クラッチ締結圧指令値Pccをプリチャージフェーズにおける締結指令値Ppreとし、ステップS223へ移行する。
ステップS222では、前進クラッチ締結圧指令値Pccをプリチャージフェーズにおける締結指令値Ppreとし、ステップS223へ移行する。
ステップS223では、トルクダウン指令値TDをプリチャージフェーズにおけるトルクダウン指令値Tdpreとし、ステップS224へ移行する。
ステップS224では、プリチャージフェーズ時間Tpが経過したかどうかが判断され、YESであればステップS225へ移行して締結フェーズにおけるトルクダウン制御を実行し、NOであればステップS222へ戻る。
(締結フェーズ)
ステップS225では、前進クラッチ締結圧指令値Pccを棚圧進行速度がVpとなる圧P(Vp)とし、ステップS226へ移行する。
ステップS225では、前進クラッチ締結圧指令値Pccを棚圧進行速度がVpとなる圧P(Vp)とし、ステップS226へ移行する。
ステップS226では、トルクダウン指令値TDを締結フェーズにおけるトルクダウン指令値TDsとし、ステップS227へ移行する。
ステップS227では、締結フェーズ時間Tsが経過したかどうかが判断され、YESであればステップS228のスリップ判断へ移行し、NOであればステップS225へ戻る。
(締結フェーズにおける前進クラッチスリップ判断及びスリップ低減制御)
ステップS228では、タービンシャフト1aと変速機入力軸1bとの回転数差SLIPを演算し、ステップS229へ移行する。
ステップS228では、タービンシャフト1aと変速機入力軸1bとの回転数差SLIPを演算し、ステップS229へ移行する。
ステップS229では、ステップS228で演算した回転数差SLIPが所定値を超過するかどうかが判断され、YESであればステップS230へ移行し、NOであればステップS231へ移行する。
ステップS230では、前進クラッチ25のスリップ解消のためトルクダウン指令値TDをを締結フェーズにおけるトルクダウン量TDsよりも大きいTDL(SLIP)とし、ステップS231に移行する。TDL(SLIP)の設定は、図5に示すSLIP-TDL(SLIP)マップに基づき、ステップS208で演算されたSLIPに対応する値を読み込む。
ステップS231では、前進クラッチ締結圧指令値Pccを締結終了フェーズにおける締結指令値Pendとし、ステップS232とする。
ステップS232では、回転数差SLIPが0かどうかが判断され、YESであればステップS233へ移行し、NOであればステップS228へ戻る。
(締結終了フェーズ)
ステップS233では、セレクトスイッチングソレノイド70をOFFとし、ステップS234へ移行する。
ステップS233では、セレクトスイッチングソレノイド70をOFFとし、ステップS234へ移行する。
ステップS234では、トルクダウン指令値TDを徐々に解除し、制御を終了する。
[前進クラッチ締結処理及びトルクダウン量設定処理の作用]
次に、上記フローチャートに基づく作用について説明する。エンジン再始動指令が出力されると、ステップS240〜ステップS242においてスタータモータ19aを駆動し、エンジン19を始動する。この動作に並行して、アクセルペダルがONかどうかが判定される。
次に、上記フローチャートに基づく作用について説明する。エンジン再始動指令が出力されると、ステップS240〜ステップS242においてスタータモータ19aを駆動し、エンジン19を始動する。この動作に並行して、アクセルペダルがONかどうかが判定される。
アクセルペダルが踏み込まれていなければ、エンジン19はアイドル回転数を維持するため大きなトルクが出力されることはない。したがって、通常のタイマ管理に基づくプリチャージフェーズ→締結フェーズ→締結終了フェーズへと移行し、前進クラッチ25を締結する。
一方、アクセルペダルが踏み込まれているときは、アクセル開度に応じてエンジン出力トルクが増大する。ここで、前進クラッチ25の締結に必要な油圧が十分に確保されていない場合は、エンジン19からの入力トルクが大きくなると前進クラッチスリップ状態が長時間継続していまい、クラッチプレートの劣化や発進応答遅れを招く。
したがって、アクセルペダルが踏み込まれたときは、エンジンコントロールユニット18に対しトルクダウン量TDを出力し、前進クラッチ25への入力トルクを制限する。以下、トルクダウン量設定論理につき説明する。
[トルクダウン量設定]
実施例1の自動変速機にあっては、エンジン出力軸19bの出力トルクはトルクコンバータ1により増幅され、変速機入力軸1bを駆動する。ここで、前進クラッチ25への入力トルク制御はタービンシャフト1aのトルクを制御することにより達成される。タービントルクTtは前進クラッチ25の締結容量によって決定されるため、前進クラッチ25への締結圧指令値からタービントルクTt(Pcc)を推定する。
実施例1の自動変速機にあっては、エンジン出力軸19bの出力トルクはトルクコンバータ1により増幅され、変速機入力軸1bを駆動する。ここで、前進クラッチ25への入力トルク制御はタービンシャフト1aのトルクを制御することにより達成される。タービントルクTtは前進クラッチ25の締結容量によって決定されるため、前進クラッチ25への締結圧指令値からタービントルクTt(Pcc)を推定する。
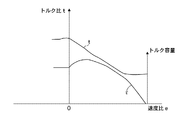
図7は、トルクコンバータ1における速度比eとトルク比tとの関係を示す図である。ここで、タービン回転数をNt、エンジン回転数をNe、タービントルクをTt、エンジントルクをTeとすると
速度比e=Nt/Ne トルク比t=Tt/Te
の関係から、タービントルクTtを出力する目標エンジントルクTe*は
Te*=(1/t)・Tt(Pcc)
となる。
速度比e=Nt/Ne トルク比t=Tt/Te
の関係から、タービントルクTtを出力する目標エンジントルクTe*は
Te*=(1/t)・Tt(Pcc)
となる。
ここで、前進クラッチ25が締結していない状態においてエンジンを再始動すると、タービンシャフト1aにかかるイナーシャは自身のイナーシャのみであるため、タービンシャフト1aはエンジン出力により連れ回り、タービン回転数Ntは増大してしまう。この状態で速度比eをエンジン回転数Neとタービン回転数Ntの比として計算すると、速度比eは非常に大きな値となり、これに伴ってトルク比tは小さな値となる。
すなわち、タービントルクTtに対する目標エンジントルクTe*が大きくなるに伴ってトルクダウン量も小さくなり、エンジンが吹け上がり気味となる。そこで、実施例1のトルクダウン制御量演算処理ではタービン回転数Ntではなくプライマリ回転数Npriを用いてトルクダウン量を演算する。プライマリ回転数Npriは車両負荷に従属する値であるため、精度のよいトルクダウン量を演算することができる。以下、上記論理に基づくトルクダウン量設定制御処理について説明する。
[トルクダウン量設定制御処理]
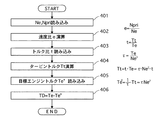
図6は、トルクダウン量設定制御処理の流れを示すフローチャートである。
ステップS401では、エンジン回転数Neとプライマリ回転数Npriを読み込む。
図6は、トルクダウン量設定制御処理の流れを示すフローチャートである。
ステップS401では、エンジン回転数Neとプライマリ回転数Npriを読み込む。
ステップS402では、速度比e=Npri/Neを読み込む。
ステップS403では、図7に示す速度比−トルク比マップからトルク比t(=Tt/Te)を読み込む。
ステップS404では、前進クラッチ締結圧指令値Pccに対応するタービントルク推定値Tt(Pcc)を演算する。
ステップS405では、各フェーズにおけるタービントルク推定値Tt(Pcc)を読み込み、このタービントルク推定値Tt(Pcc)とトルク比tに基づいて目標エンジントルクTe*を演算し、エンジンコントロールユニット18に出力する。トルクコンバータ1の特性によってトルク比tは決定されており、前進クラッチ締結圧指令値Pccによってタービントルク推定値Tt(Pcc)も決定できるため、速度比eによって目標エンジントルクTe*を演算することができる。この目標エンジントルクTe*が前進クラッチ締結制御における各フェーズにおいて最適な入力トルクとなるようにトルクダウン量を設定する。
ステップS406では、実エンジントルクTeと目標エンジントルクTe*の差分Te-Te*を演算し、この差分Te-Te*をトルクダウン量TDとしてエンジンのトルクダウン制御を行う。
[基準時間Ts超過時トルクダウン制御の経時変化]
図8は、締結フェーズの時間が基準時間Tsを超過した場合におけるトルクダウン制御の経時変化を示すタイムチャートである。
図8は、締結フェーズの時間が基準時間Tsを超過した場合におけるトルクダウン制御の経時変化を示すタイムチャートである。
(時刻t1)
時刻t1において運転者によりブレーキがOFFとされ、再発進準備のため前進クラッチ25に作動油の供給が開始され、クラッチプレートのガタ詰めすなわちピストンストロークを行うプリチャージフェーズが開始する。
時刻t1において運転者によりブレーキがOFFとされ、再発進準備のため前進クラッチ25に作動油の供給が開始され、クラッチプレートのガタ詰めすなわちピストンストロークを行うプリチャージフェーズが開始する。
(時刻t1〜t2)
時刻t1〜t2においてアクセルがONとされ、その直後にセカンダリプーリ圧が上昇を開始する。このとき前進クラッチ25はプリチャージフェーズであり、エンジントルクTeを入力してもトルク伝達はほとんど行われないため、トルクダウン制御によりエンジントルクTeは抑制され、上昇しない。
時刻t1〜t2においてアクセルがONとされ、その直後にセカンダリプーリ圧が上昇を開始する。このとき前進クラッチ25はプリチャージフェーズであり、エンジントルクTeを入力してもトルク伝達はほとんど行われないため、トルクダウン制御によりエンジントルクTeは抑制され、上昇しない。
(時刻t2)
時刻t2において前進クラッチ25のピストン室における実圧が上昇を開始する。このとき、セカンダリプーリの油圧は上昇を継続する。
時刻t2において前進クラッチ25のピストン室における実圧が上昇を開始する。このとき、セカンダリプーリの油圧は上昇を継続する。
(時刻t2〜t3)
時刻t2〜t3において前進クラッチ25の実圧が上昇を開始するが、指令圧には到達しない。時刻t3まではプリチャージフェーズが継続するためエンジントルクは上昇しない。一方、セカンダリプーリ圧は目標圧に達し一定圧となり、以降も一定圧を継続する。
時刻t2〜t3において前進クラッチ25の実圧が上昇を開始するが、指令圧には到達しない。時刻t3まではプリチャージフェーズが継続するためエンジントルクは上昇しない。一方、セカンダリプーリ圧は目標圧に達し一定圧となり、以降も一定圧を継続する。
(時刻t3)
時刻t3において前進クラッチ25のピストンストロークが終了し、クラッチプレートのスリップ状態が開始される締結フェーズに移行する。これに伴い、前進クラッチ25の実圧が指令圧に達し、前進クラッチ25の伝達可能トルクが上昇を開始する。締結フェーズに移行したことで、トルクダウン制御により締結フェーズに対応するトルクダウン指令が出力され、エンジンのトルクダウン量は前進クラッチ25の伝達可能トルクを上回らないよう抑制されつつ上昇を開始する。
時刻t3において前進クラッチ25のピストンストロークが終了し、クラッチプレートのスリップ状態が開始される締結フェーズに移行する。これに伴い、前進クラッチ25の実圧が指令圧に達し、前進クラッチ25の伝達可能トルクが上昇を開始する。締結フェーズに移行したことで、トルクダウン制御により締結フェーズに対応するトルクダウン指令が出力され、エンジンのトルクダウン量は前進クラッチ25の伝達可能トルクを上回らないよう抑制されつつ上昇を開始する。
(時刻t4)
時刻t4において締結フェーズ開始からの計測時間が基準時間Tsに到達する。しかし、クラッチプレートのスリップは未だ解消しておらず、完全締結には移行せず締結終了フェーズに移行する。クラッチプレートのスリップを速やかに解消するため、時刻t4〜t5における締結終了フェーズではエンジンのトルクダウン量を増加させ、時刻t3〜t4における締結フェーズにおけるトルクダウン量よりも大きいものとする。これによりエンジントルクTeは下降し、タービン回転数Ntすなわち前進クラッチ25の駆動側回転数と、プライマリ回転数Niすなわち前進クラッチ25の出力側回転数の差ΔNは徐々に減少し、クラッチプレートのスリップが徐々に解消する。
時刻t4において締結フェーズ開始からの計測時間が基準時間Tsに到達する。しかし、クラッチプレートのスリップは未だ解消しておらず、完全締結には移行せず締結終了フェーズに移行する。クラッチプレートのスリップを速やかに解消するため、時刻t4〜t5における締結終了フェーズではエンジンのトルクダウン量を増加させ、時刻t3〜t4における締結フェーズにおけるトルクダウン量よりも大きいものとする。これによりエンジントルクTeは下降し、タービン回転数Ntすなわち前進クラッチ25の駆動側回転数と、プライマリ回転数Niすなわち前進クラッチ25の出力側回転数の差ΔNは徐々に減少し、クラッチプレートのスリップが徐々に解消する。
(時刻t5)
時刻t5においてクラッチプレートのスリップが解消し、前進クラッチ25の完全締結が可能な完全締結フェーズに移行する。前進クラッチ25の指令圧を元圧として締結圧を元圧とするとともに、エンジンのトルクダウン指令を解除する。
時刻t5においてクラッチプレートのスリップが解消し、前進クラッチ25の完全締結が可能な完全締結フェーズに移行する。前進クラッチ25の指令圧を元圧として締結圧を元圧とするとともに、エンジンのトルクダウン指令を解除する。
(時刻t6)
時刻t6においてエンジントルクが最大となる。
時刻t6においてエンジントルクが最大となる。
[実施例1の作用効果]
実施例1では、アイドルストップ後の再発進時において、前進クラッチ25の締結容量を上回らないようエンジントルクの制御を行い、前進クラッチ25の締結フェーズ終了後のタービン回転数Ntと変速機入力軸回転数Npriとの差が所定値以上の場合、以降のトルクダウン量TDL(SLIP)を締結フェーズにおけるトルクダウン量TDsよりも大きいものとする。これにより、アイドルストップ後のエンジン再始動時に、経時劣化等により十分な油量を確保できない場合であっても、違和感のない再発進を可能とすることができる。
実施例1では、アイドルストップ後の再発進時において、前進クラッチ25の締結容量を上回らないようエンジントルクの制御を行い、前進クラッチ25の締結フェーズ終了後のタービン回転数Ntと変速機入力軸回転数Npriとの差が所定値以上の場合、以降のトルクダウン量TDL(SLIP)を締結フェーズにおけるトルクダウン量TDsよりも大きいものとする。これにより、アイドルストップ後のエンジン再始動時に、経時劣化等により十分な油量を確保できない場合であっても、違和感のない再発進を可能とすることができる。
また、締結終了フェーズにおけるエンジンのトルクダウン量TDL(SLIP)を締結フェーズの終了時におけるトルクダウン量TDs以上としたとき、前進クラッチ25の駆動側と従動側のクラッチプレートの回転数差、すなわちタービン回転数Ntとプライマリ回転数Niの差ΔNを演算し、この回転数差ΔNに基づいて徐々にトルクダウン量TDL(SLIP)を増加させることとした。これにより、締結フェーズ終了後前進クラッチ25のスリップが存在する場合であっても、徐々にクラッチプレートのスリップを解消することで、急激なクラッチ締結を回避して円滑な発進を行うことができる。
低圧領域のみ調圧可能な手段であるロックアップソレノイド71、セレクトスイッチングソレノイド70、セレクトスイッチングバルブ75およびセレクトコントロールバルブ90によりエンジン再始動の締結圧制御を行うとともに、締結完了後は低圧領域よりも高い高圧領域のみ調圧可能な第2締結圧手段であるクラッチレギュレータバルブ45、プレッシャモディファイヤバルブ73、ライン圧ソレノイド72を設け、前進クラッチ25を完全締結した後は、クラッチレギュレータバルブ45による締結圧制御に切り換える。その際、トルクダウン量を徐々に減少させ、エンジンのトルクが一定量に達した後はトルクダウンを解除することとした。これにより、急激にエンジントルクが入力されることがなく、ベルト式無段変速機のベルトすべり等を防止できる。
(他の実施例)
以上、本発明を実施するための最良の形態を実施例1に基づいて説明してきたが、本発明の具体的な構成は各実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。
以上、本発明を実施するための最良の形態を実施例1に基づいて説明してきたが、本発明の具体的な構成は各実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。
3 ベルト式無段変速機
4 プライマリ回転数センサ
5 セカンダリ回転数センサ
6 油圧コントロールバルブユニット
8 オイルポンプ
9 コントロールユニット
10 エンジン
13 アイドルストップスイッチ
16 ライン圧センサ
17 アイドルストップコントロールユニット
18 エンジンコントロールユニット
19 エンジン
19b エンジン出力軸
25 前進クラッチ
33 プライマリプーリシリンダ室
40 プレッシャレギュレータバルブ
45 クラッチレギュレータバルブ
50 パイロットバルブ
70 セレクトスイッチングソレノイド
71 ロックアップソレノイド
72 ライン圧ソレノイド
73 プレッシャモディファイヤバルブ
75 セレクトスイッチングバルブ
83 プレッシャモディファイヤバルブ
90 セレクトコントロールバルブ
4 プライマリ回転数センサ
5 セカンダリ回転数センサ
6 油圧コントロールバルブユニット
8 オイルポンプ
9 コントロールユニット
10 エンジン
13 アイドルストップスイッチ
16 ライン圧センサ
17 アイドルストップコントロールユニット
18 エンジンコントロールユニット
19 エンジン
19b エンジン出力軸
25 前進クラッチ
33 プライマリプーリシリンダ室
40 プレッシャレギュレータバルブ
45 クラッチレギュレータバルブ
50 パイロットバルブ
70 セレクトスイッチングソレノイド
71 ロックアップソレノイド
72 ライン圧ソレノイド
73 プレッシャモディファイヤバルブ
75 セレクトスイッチングバルブ
83 プレッシャモディファイヤバルブ
90 セレクトコントロールバルブ
Claims (2)
- エンジンにより駆動されるオイルポンプと、
車両発進時に前記オイルポンプを油圧源とする締結圧により締結される発進クラッチと、
該発進クラッチの解放状態から締結状態に移行する際、締結圧制御を締結フェーズを経て行う締結圧制御手段と、
車両停車時であって、かつ、所定の条件が成立したときはエンジンを停止し、前記所定の条件が不成立となったときはエンジンを再始動するアイドルストップ制御手段と、
を備えた自動変速機の制御装置において、
前記締結圧制御手段は、前記締結フェーズにおける前記発進クラッチの締結容量を上回らないようエンジンのトルクダウン指令をエンジンコントロールユニットに出力し、
前記締結フェーズ終了後のタービン回転数と変速機入力軸回転数との差が所定値以上の場合、以降のエンジントルク制限量を所定値以上とするエンジンのトルクダウン指令を出力すること
を特徴とする自動変速機の制御装置。 - 請求項1に記載の自動変速機の制御装置において、
前記締結圧制御手段は、前記エンジンのトルク制限量を前記所定値以上としたとき、前記発進クラッチの駆動側と従動側の回転数差を演算し、この回転数差に基づいて徐々に前記エンジントルク制限量を増加させるトルクダウン指令をエンジンコントロールユニットに出力すること
を特徴とする自動変速機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005012187A JP2006200422A (ja) | 2005-01-20 | 2005-01-20 | 自動変速機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005012187A JP2006200422A (ja) | 2005-01-20 | 2005-01-20 | 自動変速機の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006200422A true JP2006200422A (ja) | 2006-08-03 |
Family
ID=36958642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005012187A Pending JP2006200422A (ja) | 2005-01-20 | 2005-01-20 | 自動変速機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006200422A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100833614B1 (ko) | 2007-06-28 | 2008-05-30 | 주식회사 케피코 | 아이들스탑 기능을 가진 차량의 엔진 제어 방법 |
| JP2008150022A (ja) * | 2006-12-15 | 2008-07-03 | Hyundai Motor Co Ltd | Etcが搭載されたハイブリッド電気自動車のエンジントルク制御方法 |
| JP2008208988A (ja) * | 2007-01-31 | 2008-09-11 | Yamaha Motor Co Ltd | 車両、その制御装置および車両の異常検出方法 |
| JP2009030680A (ja) * | 2007-07-25 | 2009-02-12 | Nissan Motor Co Ltd | 車両の発進クラッチスタンバイ制御装置 |
| JP2009092207A (ja) * | 2007-10-11 | 2009-04-30 | Honda Motor Co Ltd | 無段変速機の制御装置 |
| JP2017036744A (ja) * | 2015-08-06 | 2017-02-16 | トヨタ自動車株式会社 | 車両制御装置 |
| CN106481810A (zh) * | 2015-09-02 | 2017-03-08 | 丰田自动车株式会社 | 车辆控制装置及车辆控制方法 |
| CN110703589A (zh) * | 2019-10-18 | 2020-01-17 | 上海格陆博实业有限公司 | 一种基于双pid控制算法的下层控制器控制策略 |
| CN112937583A (zh) * | 2021-03-19 | 2021-06-11 | 重庆长安汽车股份有限公司 | 一种车辆低温起步控制方法及计算机可存储介质 |
| WO2023276776A1 (ja) * | 2021-07-02 | 2023-01-05 | ジヤトコ株式会社 | 車両の制御装置、車両の制御方法、及びプログラム |
-
2005
- 2005-01-20 JP JP2005012187A patent/JP2006200422A/ja active Pending
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008150022A (ja) * | 2006-12-15 | 2008-07-03 | Hyundai Motor Co Ltd | Etcが搭載されたハイブリッド電気自動車のエンジントルク制御方法 |
| JP2008208988A (ja) * | 2007-01-31 | 2008-09-11 | Yamaha Motor Co Ltd | 車両、その制御装置および車両の異常検出方法 |
| KR100833614B1 (ko) | 2007-06-28 | 2008-05-30 | 주식회사 케피코 | 아이들스탑 기능을 가진 차량의 엔진 제어 방법 |
| WO2009002002A1 (en) * | 2007-06-28 | 2008-12-31 | Kefico Corporation | Engine control method for a vehicle with idle stop function |
| US8214112B2 (en) | 2007-06-28 | 2012-07-03 | Kefico Corporation | Engine control method for a vehicle with idle stop function |
| JP2009030680A (ja) * | 2007-07-25 | 2009-02-12 | Nissan Motor Co Ltd | 車両の発進クラッチスタンバイ制御装置 |
| JP2009092207A (ja) * | 2007-10-11 | 2009-04-30 | Honda Motor Co Ltd | 無段変速機の制御装置 |
| JP2017036744A (ja) * | 2015-08-06 | 2017-02-16 | トヨタ自動車株式会社 | 車両制御装置 |
| CN106481810A (zh) * | 2015-09-02 | 2017-03-08 | 丰田自动车株式会社 | 车辆控制装置及车辆控制方法 |
| JP2017048864A (ja) * | 2015-09-02 | 2017-03-09 | トヨタ自動車株式会社 | 車両制御装置 |
| CN110703589A (zh) * | 2019-10-18 | 2020-01-17 | 上海格陆博实业有限公司 | 一种基于双pid控制算法的下层控制器控制策略 |
| CN110703589B (zh) * | 2019-10-18 | 2023-11-03 | 上海格陆博实业有限公司 | 一种基于双pid控制算法的下层控制器控制策略 |
| CN112937583A (zh) * | 2021-03-19 | 2021-06-11 | 重庆长安汽车股份有限公司 | 一种车辆低温起步控制方法及计算机可存储介质 |
| CN112937583B (zh) * | 2021-03-19 | 2022-06-03 | 重庆长安汽车股份有限公司 | 一种车辆低温起步控制方法及计算机可存储介质 |
| WO2023276776A1 (ja) * | 2021-07-02 | 2023-01-05 | ジヤトコ株式会社 | 車両の制御装置、車両の制御方法、及びプログラム |
| JP7545586B2 (ja) | 2021-07-02 | 2024-09-04 | ジヤトコ株式会社 | 車両の制御装置、車両の制御方法、及びプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4129264B2 (ja) | 自動変速機の制御装置 | |
| JP4319151B2 (ja) | 自動変速機の制御装置 | |
| JP3964333B2 (ja) | 自動変速機の変速油圧装置 | |
| JP4784563B2 (ja) | ロックアップクラッチの制御装置 | |
| JP4006257B2 (ja) | 自動変速機の変速油圧装置 | |
| JP2006200422A (ja) | 自動変速機の制御装置 | |
| JP2003294118A (ja) | 自動変速機の変速油圧装置 | |
| JP4417237B2 (ja) | 自動変速機の制御装置 | |
| US20040116244A1 (en) | System and method of controlling V-belt type continuously variable transmission | |
| JP2005036820A (ja) | アイドルストップ車両の変速機油圧制御装置 | |
| JP4452228B2 (ja) | 無段変速機のライン圧制御装置 | |
| JP4573796B2 (ja) | 自動変速機の油圧制御装置 | |
| JP4319128B2 (ja) | 自動変速機の制御装置 | |
| JP4070739B2 (ja) | 無段変速機 | |
| JP2009101910A (ja) | 車両の制御装置 | |
| JP5712331B2 (ja) | エンジン自動停止車両及びその制御方法 | |
| JP4645119B2 (ja) | 無段変速機の制御装置 | |
| JP2007071300A (ja) | 自動変速機の制御装置 | |
| JP6268409B2 (ja) | アイドルストップ車の制御装置 | |
| JPWO2019044397A1 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP2008106813A (ja) | 車両用ベルト式無段変速機の油圧制御装置 | |
| JP2018150970A (ja) | 自動変速機及び自動変速機の制御方法 | |
| JP2018013174A (ja) | 自動変速機の制御装置及び自動変速機の制御方法 | |
| JP2004332904A (ja) | 無段変速機の変速比制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060607 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080902 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090106 |