JP2007135268A - 超音波モータのステータ - Google Patents
超音波モータのステータ Download PDFInfo
- Publication number
- JP2007135268A JP2007135268A JP2005323736A JP2005323736A JP2007135268A JP 2007135268 A JP2007135268 A JP 2007135268A JP 2005323736 A JP2005323736 A JP 2005323736A JP 2005323736 A JP2005323736 A JP 2005323736A JP 2007135268 A JP2007135268 A JP 2007135268A
- Authority
- JP
- Japan
- Prior art keywords
- stator
- rotor
- ultrasonic motor
- piezoelectric element
- comb teeth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000015572 biosynthetic process Effects 0.000 abstract 1
- 238000001514 detection method Methods 0.000 description 6
- 230000010287 polarization Effects 0.000 description 4
- 244000126211 Hericium coralloides Species 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
Images






Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
【課題】超音波モータの効率向上とトルクを増大することができるステータを提供することである。
【解決手段】弾性体に固着した複数の圧電体により進行波を形成するステータと、ロータとを備え、前記ステータの進行波形成面に前記ロータを加圧接触させて回転するように構成した超音波モータのステータにおいて、前記ステータの周方向に複数の櫛歯を備え、円周上の法線と所定の角度を有して設けた複数のスリットにより前記櫛歯を形成していることを特徴とする。
【選択図】図2
【解決手段】弾性体に固着した複数の圧電体により進行波を形成するステータと、ロータとを備え、前記ステータの進行波形成面に前記ロータを加圧接触させて回転するように構成した超音波モータのステータにおいて、前記ステータの周方向に複数の櫛歯を備え、円周上の法線と所定の角度を有して設けた複数のスリットにより前記櫛歯を形成していることを特徴とする。
【選択図】図2
Description
本発明は超音波モータ等の振動体に用いられるステータに関するものである。
従来から、磁力を使わずにステータ側の圧電素子の振動により、そのステータに接するロータを駆動することができる超音波モータの開発が進んでいる。
超音波モータではステータの数やロータの形状を工夫することによって様々な用途に用いることができ、たとえばディスク型やリング型のロータがすでによく知られている。また最近では、ロータを球体にした球面超音波モータの開発も進んできている。
このような超音波モータのステータは、たとえば平板円環状の圧電素子の所定個所を所定方向に分極させてA相およびB相を形成して圧電素子部材とし、この圧電素子部材のA相、B相ごとに設けた駆動電極に対して所定電圧を印加して圧電素子部材を固着した弾性体に進行波を発生させる。その進行波形成面にロータを加圧接触させて摩擦によりロータが回転する。
特許文献1や特許文献2には、従来の超音波モータのステータの櫛歯の形状が開示されている。この従来のステータの構造について図面を参照して以下に説明する。
図8は、従来の超音波モータのステータを示す図であり、(a)はロータの接触する方向から見た平面図であり、(b)は櫛歯部分の側断面図である。
図8(a)に示すように、ステータ203bのロータ接触面には、ステータ203bの円周に沿って多数の櫛歯233が設けられている。このステータの裏面には、リング状の圧電素子部材が固着されており、交流電圧の印加により伸縮を繰り返し、ステータの周方向に進行波が発生する。
櫛歯233は、櫛歯の凸部に加圧接触される図示なきロータを効率よく回転させるために、ロータの回転方向の振動振幅を拡大する効果がある。
従来の超音波モータのステータ203bでは、図8(a)および(b)に示すように、円板状のステータ203bの円周の法線と一致する方向で放射線状に設けた複数のスリット233aにより櫛歯233を形成している。
従来から超音波モータでは効率をより向上させてトルクを増大させることが課題となっていた。
本発明は上記の点にかんがみてなされたもので、ステータの振動振幅に大きく影響する櫛歯とそれを形成させるスリットの形状を改良して超音波モータの効率向上とトルクを増大することができるステータを提供することを目的とする。
本発明は、弾性体に固着した複数の圧電体により進行波を形成するステータと、ロータとを備え、前記ステータの進行波形成面に前記ロータを加圧接触させて回転するように構成した超音波モータのステータにおいて、前記ステータの周方向に複数の櫛歯を備え、円周上の法線と所定の角度を有して設けた複数のスリットにより前記櫛歯を形成していることを特徴とする。
本発明によれば、櫛歯の長さが長くなるため、振幅が増大し、超音波モータのトルクを増大させることができる。
また本発明によれば、ステータ表面のスリットが円周方向に傾いているため、円周方向の剛性の均一化が図られ、進行波が安定するという効果もある。
以下、本発明の実施の形態について図面を参照して詳細に説明する。
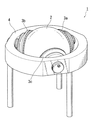
図1は、本発明の一実施の形態による球面超音波モータの概略を示す斜視図である。
なお、本実施の形態ではロータが球体である球面超音波モータの場合について説明するが、本発明による超音波モータのステータは、円板状のロータに対しても適用することができる。
図1に示すように、本実施の形態による超音波モータ1は、球体のロータ2を、枠部材4に設けられた3個のステータ3a、3bおよび3cによって保持して回転させる。ステータ3a、3bおよび3cのロータ2と接する面には後に図2に示す多数の櫛歯33が設けられており、この櫛歯33が振動して進行波を発生し、これによってロータ2が回転させられる。
なお、本実施の形態においては各ステータ3a、3b、3cの構造は同様であるので、以下では代表してステータ3bについて説明する。
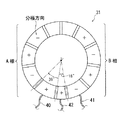
図2は、図1に示したステータ3bを、ロータ2の接触面から見た平面図である。
図2に示すように、ステータ3bのロータ2の接触面には、ステータ3bの円周に沿って多数の櫛歯33が設けられている。これらの櫛歯33の下には後に図3に示す圧電素子部材31が設けられており、その圧電素子部材の圧電素子は電圧印加によって伸縮し櫛歯33を振動させる。超音波モータ1では、この振動を制御することによってロータ2を任意の方向に回転させることができる。
本実施の形態のステータ3bでは、図2に示すように、円板状のステータ3bの円周の法線と成す角度が10°となる方向で放射線状に、隣接する櫛歯233どうしを分離するスリット33aを設け、これによって複数の櫛歯33のそれぞれを形成している。
図3は、図2に示したステータ3bを弾性体30と圧電素子部材31とに分解して示す分解斜視図である。
図3に示すように、ステータ3bは弾性体30と圧電素子部材31とから構成される。
弾性体30の表面には、図2にも示したように、スリット33aで分離された複数の櫛歯33が設けられている。
圧電素子部材31は、平板円環状の圧電素子36と、圧電素子36のうちの所定の圧電素子片にA相のための所定方向の分極をさせるための個別電極34と、圧電素子36のうちの所定の圧電素子片にB相のための所定方向の分極をさせるための個別電極35と、A相の圧電素子片を駆動するための駆動電極38と、B相の圧電素子片を駆動するための駆動電極37と、圧電素子36のうちの所定の圧電素子片に振動検出用の所定方向の分極をさせるための個別電極50と、圧電素子36の振動によって個別電極50下の圧電素子片が発生する電位を検出するための振動検出用電極51と、A相の駆動電極38に電圧印加するための配線40と、B相の駆動電極37に電圧印加するための配線41と、振動検出用電極51から電位検出するための配線42とを有して構成される。
個別電極34、個別電極35、個別電極50、振動検出用電極51、駆動電極37および駆動電極38はたとえば銀電極であり、配線40、配線41および配線42のそれぞれは、たとえばハンダ付けによって、配線40が駆動電極38に、配線41が駆動電極37に、配線42が振動検出用電極51に接続される。
図4は、図3に示したステータ3bの圧電素子部材31の構造を示す図であり、(a)は圧電素子部材31の斜視図であり、(b)は(a)を一点鎖線で示す軸X−Xで回転させて裏から見た斜視図であり、(c)は(a)の一部を破断して示す部分破断斜視図である。
図4(a)〜(c)に示すように、圧電素子部材31では、平板円環状の圧電素子36の円周方向の一部をA相、円周方向の他の一部をB相とし、A相とB相とを時間的に位相をずらして駆動して、振動の進行波を発生させる。
図5は、図4(a)に示した本実施の形態の圧電素子部材31の分極方向を示す平面図である。
図4(a)に示すように、本実施の形態の圧電素子部材31は、円周方向左側部分がA相とされ、そのA相にて分極方向が逆の圧電素子片が交互に、それぞれたとえば36°の角度を有して設けられており、また、円周方向右側部分がB相とされ、そのB相にて分極方向が逆の圧電素子片が交互に、それぞれたとえば36°の角度を有して設けられている。また、図5に示すように、A相とB相とはたとえば18°ずらして構成されている。
図6は超音波モータのトルクを測定した実験結果を示す図である。
図6においては、図8(a)および(b)に示した従来のステータおよび図2に示した本実施の形態のステータのトルクを示し、それぞれにおいてロータをステータに押し付ける押付力を1kgにした場合および1.5kgにした場合でのトルクを示している。
図6を参照してわかるように、押付力を1kgにした場合および1.5kgにした場合のいずれにおいても、図8(a)および(b)のようにステータ表面のスリット233aとステータ203bの円周の法線とが成す角度が0°の場合(図6では0°と示す)よりも、図2のようにステータ表面のスリット33aとステータ3bの円周の法線とが成す角度が10°の場合(図6では10°と示す)の方が、大きなトルクが得られた。
ところで、図2に示した実施の形態では、ステータ表面のスリットとステータの円周の法線とが成す角度を10°にしたが、本発明はこれに限られるものではなく、必要に応じた角度にすることができる。この一例を図7に示す。
図7は、本発明によるステータの図2とは別の例を示す平面図である。
図7に示すように、この例のステータ103bでは、円板状のステータ103bの円周の法線と成す角度が30°となる方向で放射線状に、隣接する櫛歯133どうしを分離するスリット133aを設け、これによって複数の櫛歯133のそれぞれを形成している。本発明は、この図7のような構成にすることもできる。
1 位置検出装置
2 ロータ
3a、3b、3c ステータ
4 枠部材
30 弾性体
31 圧電素子部材
33 櫛歯
33a スリット
34、35 固定電極
36 圧電素子
37、38 駆動電極
40、41 配線
2 ロータ
3a、3b、3c ステータ
4 枠部材
30 弾性体
31 圧電素子部材
33 櫛歯
33a スリット
34、35 固定電極
36 圧電素子
37、38 駆動電極
40、41 配線
Claims (2)
- 弾性体に固着した複数の圧電体により進行波を形成するステータと、ロータとを備え、前記ステータの進行波形成面に前記ロータを加圧接触させて回転するように構成した超音波モータのステータにおいて、
前記ステータの周方向に複数の櫛歯を備え、円周上の法線と所定の角度を有して設けた複数のスリットにより前記櫛歯を形成していることを特徴とする超音波モータのステータ。 - 請求項1に記載のステータを備え、前記ステータによって前記ロータを駆動することを特徴とする超音波モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005323736A JP2007135268A (ja) | 2005-11-08 | 2005-11-08 | 超音波モータのステータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005323736A JP2007135268A (ja) | 2005-11-08 | 2005-11-08 | 超音波モータのステータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007135268A true JP2007135268A (ja) | 2007-05-31 |
Family
ID=38156490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005323736A Withdrawn JP2007135268A (ja) | 2005-11-08 | 2005-11-08 | 超音波モータのステータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007135268A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8061047B2 (en) | 2009-04-08 | 2011-11-22 | Schlumberger Technology Corporation | Active positioning of downhole devices using spherical motors |
| JP2018188275A (ja) * | 2017-05-09 | 2018-11-29 | シンフォニアテクノロジー株式会社 | ワーク搬送装置 |
-
2005
- 2005-11-08 JP JP2005323736A patent/JP2007135268A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8061047B2 (en) | 2009-04-08 | 2011-11-22 | Schlumberger Technology Corporation | Active positioning of downhole devices using spherical motors |
| JP2018188275A (ja) * | 2017-05-09 | 2018-11-29 | シンフォニアテクノロジー株式会社 | ワーク搬送装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5110170B2 (ja) | 圧電振動子及び超音波モータ | |
| CN102037638B (zh) | 超声波电动机 | |
| JP2009131145A (ja) | 円環型圧電超音波共振器及びそれを用いた圧電超音波回転モータ | |
| KR101040474B1 (ko) | 비틀림진동모드가 가능한 전극구조를 갖는 압전진동체 및 이를 포함하는 회전형 초음파 모터 | |
| JPH0117354B2 (ja) | ||
| JPH07115782A (ja) | 振動波駆動装置 | |
| JP2013201813A (ja) | 駆動装置及びモータ | |
| JP4261894B2 (ja) | 振動型駆動装置 | |
| JP2981471B2 (ja) | 両面駆動超音波モータ | |
| JP4119903B2 (ja) | 平板型圧電超音波モーター | |
| JP2007135268A (ja) | 超音波モータのステータ | |
| JP7392874B2 (ja) | 超音波モータ | |
| JP2007135267A (ja) | 超音波モータ | |
| JP4497980B2 (ja) | 圧電体およびその分極方法 | |
| JPS62247770A (ja) | 超音波モ−タ | |
| JPS63181676A (ja) | 超音波回転振動子 | |
| JPH0681523B2 (ja) | 振動波モ−タ | |
| JP4731737B2 (ja) | 振動波モータ | |
| JPS60183981A (ja) | 超音波モ−タ | |
| JP2007221845A (ja) | 球面超音波モータ | |
| JP2003143877A (ja) | 圧電素子利用のモ−タ− | |
| JP3089324B2 (ja) | 超音波モータ | |
| JP2001298969A (ja) | 超音波モータ | |
| JP2003169486A (ja) | 超音波モータ | |
| JP2537848B2 (ja) | 超音波モ−タ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20090203 |