JP2007178138A - 角速度センサユニットの出力補正方法 - Google Patents
角速度センサユニットの出力補正方法 Download PDFInfo
- Publication number
- JP2007178138A JP2007178138A JP2005373760A JP2005373760A JP2007178138A JP 2007178138 A JP2007178138 A JP 2007178138A JP 2005373760 A JP2005373760 A JP 2005373760A JP 2005373760 A JP2005373760 A JP 2005373760A JP 2007178138 A JP2007178138 A JP 2007178138A
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- velocity sensor
- sensor
- axis
- sensor unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Landscapes
- Navigation (AREA)
- Gyroscopes (AREA)
Abstract
【課題】1回の角速度入力で少なくとも2つの角速度センサの搭載誤差を補正できる角速度センサユニットの出力補正方法を提供する。
【解決手段】少なくとも2つの角速度センサユニットを静止状態とした時の各角速度センサの出力より中点を決定するステップと、検出対象軸の2軸とは非平行かつ非直交の入力軸まわりに角速度センサユニットを所定の角速度で回転したときの少なくとも2つの角速度センサの実際のセンサ出力値と入力軸まわりに所定の角速度で回転したときに角速度センサのパッケージへの搭載誤差がなく各角速度センサが検出する軸と検出対象軸が一致するときの理想の角速度センサ出力値と比較して、各角速度センサのパッケージへの搭載誤差による補正値を算出するステップと、中点及び補正値に基づいて、角速度センサユニットが検出対象物に取り付けられたときに角速度センサの出力値を補正するステップとを具備する。
【選択図】図9
【解決手段】少なくとも2つの角速度センサユニットを静止状態とした時の各角速度センサの出力より中点を決定するステップと、検出対象軸の2軸とは非平行かつ非直交の入力軸まわりに角速度センサユニットを所定の角速度で回転したときの少なくとも2つの角速度センサの実際のセンサ出力値と入力軸まわりに所定の角速度で回転したときに角速度センサのパッケージへの搭載誤差がなく各角速度センサが検出する軸と検出対象軸が一致するときの理想の角速度センサ出力値と比較して、各角速度センサのパッケージへの搭載誤差による補正値を算出するステップと、中点及び補正値に基づいて、角速度センサユニットが検出対象物に取り付けられたときに角速度センサの出力値を補正するステップとを具備する。
【選択図】図9
Description
本発明は、検出対象物に取り付けられ、互いに直交する3軸のうち少なくもと2軸を検出対象軸とし、該検出対象軸を中心とする角速度を検出する少なくとも2つの角速度センサを有し、前記角度センサを一つのパッケージに収容する角速度センサユニットの出力補正方法に関する。
車両や飛行体等の位置や姿勢の観測のために、角速度及び加速度等の測定が行われ、そのために、角速度センサや加速度センサ等を有する慣性センサが用いられている。ヨーレートセンサ、ピッチレートセンサ及びロールレートセンサ等の各角速度センサは、パッケージ内の所定の位置に配置される。そして、慣性センサユニットは車両や飛行体等の検出対象物に取り付けられ、慣性センサユニット内の各角速度センサにより検出されたヨーレート、ロールレート及びピッチレートの角速度センサ等のセンサ出力に基づいて、車両や飛行体等の姿勢や速度等が制御される。
各角速度センサはパッケージ内の所定位置に搭載されるが、角速度センサのパッケージへの搭載誤差が通常生じる。角速度センサの搭載誤差があると、そのずれによりセンサの検出誤差が発生することから、誤差補正を行う必要がある。センサの誤差補正に係る先行技術として、特許文献1がある。
特許文献1では、3軸の加速度センサが搭載された傾斜測定装置を6面体の一面部に固定し、6面体を90°回転して6面体の全ての面について各軸(X,Y,Z)の加速度センサデータを取得し、全ての加速度センサデータをもとに各軸の重力加速度の他軸に対する感度を演算し、補正データを算出することが記載されている。
また、3軸角速度センサ及び3軸方向の加速度センサが同一のパッケージに収容された慣性センサユニットにおいて、加速度センサにより検出される車両の前後方向の加速度は車両が走行している道路勾配の影響を受けて、真値からずれることから、正確な加速度検出値を得る先行技術として、特許文献2がある。
特許文献2では、車両の車体に固定された車体座標系を車体が傾斜していない状態に対応した基準座標系に変換して、基準座標系でのピッチレート、ロールレート、ヨーレートに基づいて、前後加速度の検出誤差を補正することが記載されている。
特開平10−267651号公報
特開2004−150973号公報
しかしながら、特許文献1では、6面体を90°回転して6面全てについて、各軸(X,Y,Z)のセンサデータを取得して、補正データを算出することから、各回転について回転誤差があり、回転誤差が累積されることにより、補正データの精度が悪化するという問題点があった。また、6面体を全ての面について、3軸の加速度センサ出力を取得する必要があることから補正データの取得に係る作業が面倒であるという問題点がある。
特許文献2では、道路勾配による加速度の真値からの誤差を補正することはできるが、慣性センサユニット内に収容された各角速度センサの搭載誤差による補正を行うことはできない。
本発明は、上記問題点に鑑みてなされたものであり、1回の角速度入力で少なくとも2つの角速度センサの搭載誤差を補正できる角速度センサユニットの出力補正方法を提供することを目的とする。
請求項1記載の発明によると、検出対象物に取り付けられ、互いに直交する3軸のうち少なくとも2軸を検出対象軸とし、該検出対象軸を中心とする角速度を検出する少なくとも2つの角速度センサを有し、前記少なくとも2つの角度センサを一つのパッケージに収容する角速度センサユニットの出力補正方法であって、前記少なくとも2つの角速度センサユニットを静止状態とした時の前記各角速度センサの出力より中点を決定するステップと、前記検出対象軸の2軸とは非平行かつ非直交の入力軸まわりに前記角速度センサユニットを所定の角速度で回転したときの前記少なくとも2つの角速度センサの実際のセンサ出力値と前記入力軸まわりに前記所定の角速度で回転したときに前記角速度センサの前記パッケージへの搭載誤差がなく前記各角速度センサが角速度を検出する軸と前記検出対象軸が一致するときの理想のセンサ出力値と比較して、前記各角速度センサの前記パッケージへの搭載誤差による補正値を算出するステップと、前記中点及び前記補正値に基づいて、前記角速度センサユニットが検出対象物に取り付けられたときに前記角速度センサの出力値を補正するステップとを具備したことを特徴とする角速度センサユニットの出力補正方法が提供される。
請求項2記載の発明によると、請求項1記載の発明において、前記決定された中点及び前記補正値を前記角速度センサユニットに設けられた補正データ記憶部に記憶させることを特徴とする角速度センサユニットの出力補正方法が提供される。
請求項1記載の発明によれば、検出対象軸の2軸とは非平行かつ非直交の入力軸まわりに角速度センサユニットを所定の角速度で回転すると、少なくとも2つの角速度センサが感度を有するので、複数の角速度センサを有する角速度センサユニットの搭載誤差による感度のずれを1回の角速度入力で補正することができるため、正確なセンサ出力を得ることができる
請求項2記載の発明によれば、角速度センサユニットが検出対象物に取り付けられる前に算出した補正値を補正データ記憶部に予め記憶させておくことができ、角速度センサユニットが検出対象物に取り付けられた後に、常に、中点データ及び補正値に基づいて、搭載誤差による角速度のずれを補正することができる。
請求項2記載の発明によれば、角速度センサユニットが検出対象物に取り付けられる前に算出した補正値を補正データ記憶部に予め記憶させておくことができ、角速度センサユニットが検出対象物に取り付けられた後に、常に、中点データ及び補正値に基づいて、搭載誤差による角速度のずれを補正することができる。
図1は本発明の実施形態の角速度センサユニットの補正方法が適用される角速度センサユニットの機能ブロック図を示す図である。角速度センサユニットの一例として3軸角速度センサを含み、車両等に搭載される慣性センサユニット2を例に説明する。慣性センサユニット2は、自動車等の車両の重心付近に取り付けられる。慣性センサユニット2は、ヨーレートセンサ4#1、ロールレートセンサ4#2及びピッチレートセンサ4#3からなる3軸角速度センサ、左右加速度センサ6#1、上下加速度センサ6#2及び前後加速度センサ6#3からなる複数の加速度センサ、演算部8、通信素子10並びにDC/DCコンバータ12を備える。
ヨーレートセンサ4#1は、上下軸まわりの角速度であるヨーレートωを検出し、ヨーレートωに対応するアナログ信号(例えば、電圧)を出力する。ロールレートセンサ4#2は、前後軸まわりの角速度であるロールレートφを検出し、ロールレートφに対応するアナログ信号(電圧)を出力する。ピッチレートセンサ4#3は、左右軸まわりの角速度であるピッチレートθを検出し、ピッチレートθに対応するアナログ信号(電圧)を出力する。
左右加速度センサ6#1は、左右軸方向の加速度を検出し、左右加速度に対応するアナログ信号(電圧)を出力する。上下加速度センサ6#2は、上下軸方向の加速度を検出し、上下加速度に対応するアナログ信号(電圧)を出力する。前後加速度センサ6#3は、前後軸方向の加速度を検出し、前後加速度に対応するアナログ信号(電圧)を出力する。
例えば、3軸角速度センサ4#1〜4#3及び加速度センサ6#1〜6#3は、DC/DCコンバータ12より出力される電圧(5V)を入力し、抵抗等を用いて、検出範囲に対応する0V〜5Vの範囲の電圧を出力する。
例えば、ヨーレートω、ロールレートφ、ピッチレートθの検出範囲をそれぞれ−100°/sec〜100°/secであるとすると、この検出範囲に対応して、0〜5Vの範囲の電圧が出力される。従って、角速度0°/secに対応する電圧(中点電圧)は2.5Vである。
演算部8は、例えば、マイクロコンピータ(マイコン)により構成する。演算部8は、後述するように、慣性センサユニット2の製造後車両への取り付け前の検査段階において、ヨーレートセンサ4#1、ロールレートセンサ4#2及びピッチレートセンサ4#3のパッケージへの搭載ずれによる誤差を補正するためのヨーレート、ロールレート、ピッチレートの補正データωR、φR、θRを算出する。そして、慣性センサユニット2の車両への取り付け後において、この補正データωR、φR、θRを元に、ヨーレートセンサ4#1、ロールレートセンサ4#2及びピッチレートセンサ4#3より検出されたヨーレートω、ロールレートφ、ピッチレートθを補正する。また、補正後のヨーレートω、ロールレートφ及びピッチレートθ、並びに左右加速度、上下加速度及び前後加速度を所定のインタフェースでパケット化し、通信素子10を通して、図示しないLANに送信する。
通信素子10は、接続される図示しないLANとインタフェースを司るLANコントローラである。DC/DCコンバータ12は、外部から供給される直流電圧(12V)を所定の直流電圧(5V)に変換するコンバータである。DC/DCコンバータ12により変換された直流電圧(5V)は、センサ4#1〜4#3,6#1〜6#3、演算部8及び通信素子10に供給される。
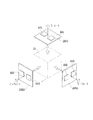
図2に示すように、ヨーレートセンサ4#1と左右加速度センサ6#1は、お互いの検出軸が直交するように同一のセンサ基板20#1上に実装されている。ロールレートセンサ4#2と上下加速度センサ6#2は、お互いの検出軸が直交するように同一のセンサ基板20#2上に実装されている。また、ピッチレートセンサ4#3と前後加速度センサ6#3は、お互いの検出軸が直交するように同一のセンサ基板20#3上に実装されていている。
基板20#1,20#2,20#3上にセンサ4#1〜4#3,6#1〜6#3を実装する際に、基板20#1,20#2,20#3の基準方向に対するセンサ4#1〜4#3、6#1〜6#3の検出軸の方向の誤差(搭載誤差)が生じる。各センサ基板20#1,20#2,20#3は、図2に示すように、例えば、センサ基板20#1〜20#3のそれぞれの所定の辺が、各面が直交する立方体等からなる取り付け台22の3軸方向に平行となるよう搭載される。この際、センサ基板20#1,20#2,20#3の取り付け台22の搭載誤差により、センサ4#1〜4#3,6#1〜6#3が角速度を検出する軸(検出軸)が取り付け台22の3軸方向からずれる。
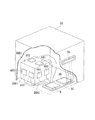
図3に示すように、各センサ基板20#1,20#2,20#3が搭載された取り付け台22は、その3軸の基準方向がハウジング30の3軸方向と平行になるように、例えば、ハウジング30の底面に取り付けられる。慣性センサユニット2はハウジング30の3軸方向を基準に車両の重心付近に取り付けられることから、センサ4#1〜4#3の搭載ずれにより、センサ4#1〜4#3,6#1〜6#3の検出軸が検出されるべき軸(検出対象軸)からずれる。以下、センサ4#1〜4#3の検出軸方向の検出対象軸からのずれをセンサ4#1〜4#3の搭載誤差と呼ぶ。
マイコン8、通信素子10及びDC/DCコンバータ12が搭載された制御基板32は、例えば、ハウジング30の底面に取り付けられる。制御基板32は、外部から電源供給及び外部とLAN接続をするために設けられたコネクタ34に接続されている。角速度センサ4#1〜4#3が一つのハウジング30に収容され、ハウジング30が樹脂等で封止される。このような慣性センサユニット(角速度センサユニット)の構造をパッケージ構造と呼ぶ。
図4に示すように、マイコン8は、A/D変換器40、CPU42、メモリ44、補正データ記憶部46及びインタフェース部48を有する。A/D変換器40は、センサ4#1〜4#3、6#1〜6#3から出力されるアナクログ信号を所定の周期でサンプリングして、所定ビット数、例えば、10ビットで量子化して、デジタル信号を出力する。以下、センサ4#1〜4#3、6#1〜6#3からのアナログ出力値がA/D変換器40によりデジタル信号に変換されたデジタル値をセンサ4#1〜4#3,6#1〜6#3の出力値と略す。
CPU42は、メモリ44に格納された演算プログラムを実行することにより、後述するように、慣性センサユニット2の製造後、車両に取り付けられる前に以下の機能を実現する。ヨーレートセンサ4#1、ロールレートセンサ4#2及びピッチレートセンサ4#3のハウジング30への搭載誤差を補正するための補正データωR、φR、θRを算出し、補正データ記憶部46に記憶する。
CPU42は、慣性センサユニット2が車両に取り付けられると、以下の機能を実現する。慣性センサユニット2が静止、即ち、車両が静止している状態での各レートセンサ4#1〜4#3の出力値(中点データ)を元に、車両のそれ以外の状態(通常状態)での各レートセンサ4#1〜4#3の出力値に対し、静止時の各レートセンサ4#1〜4#3の出力値が中点(2.5V,デジタル値=512)となるように補正(中点補正)を行い、車両が直進(非旋回)状態かつ一定速(非加減速)状態が比較的長時間継続している安定状態での各加速度センサ6#1〜6#3の出力値(中点データ)を元に、車両のそれ以外の状態(通常状態)での各加速度センサ6#1〜6#3の出力値に対し、安定状態での各加速度センサ6#1〜6#3の出力値が中点となるように同様の中点補正を行う。中点補正するのは、センサ4#1〜4#3、6#1〜6#3が有する抵抗の抵抗値等が温度等の動作環境により変化し、中点がドリフトするからである。
更に、CPU42は、補正データ記憶部46に記憶された補正データωR、φR、θRを元に、中点補正されたヨーレートω、ロールレートφ、ピッチレートθに対し、搭載誤差補正をする。搭載誤差補正されたヨーレートω’、ロールレートφ’及びピッチレートθ’、並びに左右加速度、上下加速度及び前後加速度をインタフェース部48及び通信素子10を通してLANに出力する。
メモリ44は、演算プログラムを格納するROM及び演算データを格納するRAMからなる。補正データ記憶部46は、上記補正データωR、φR、θRや車両の静止状態での各レートセンサ4#1〜4#3、安定状態での各加速度センサ6#1〜6#3の出力値である中点データを格納するROMである。インタフェース部48は通信素子10との間でLANをインタフェースする。
図5は、図4中のCPU42の搭載誤差補正に係る機能ブロック図である。図5に示すように、演算部8は、3軸角速度補正量算出手段60と3軸角速度補正手段62を有する。3軸角速度補正量算出手段60は慣性センサユニット2の製造後車両搭載前に、センサ4#1〜4#3の搭載誤差による補正データωR、φR、θRを算出するものであり、中点データ取得部70、3軸角速度センサデータ取得部72、中点補正部76及び角速度補正量算出部78を有する。
中点データ取得部70は、慣性センサユニット2の静止状態での角速度センサ4#1〜4#3の出力値(中点データ)を取得して、補正データ記憶部46に格納する。3軸角速度センサデータ取得部72は、所定の入力軸方向に回転することにより、3軸角速度センサ4#1〜4#3が検出対象軸方向に角速度成分を有するよう、入力軸が3軸角速度センサ4#1〜4#3のそれぞれの検出対象軸方向と非平行且つ非直交となる所定の入力軸回りに所定の角速度で慣性センサユニット2を回転したときのセンサ4#1〜4#3の出力値を取得する。
ピッチレートセンサ4#3、ロールレートセンサ4#2及びヨーレートセンサ4#1の検出対象軸をY軸,X軸,Z軸とする。3次元座標系(X,Y,Z)を回転により座標変換したとき、回転後のX軸、Y軸、Z軸をX’軸、Y’軸、Z’軸とすると、回転後のピッチレートセンサ4#3、ロールレートセンサ4#2、ヨーレートセンサ4#1の検出対象軸はX’軸、Y’軸、Z’軸となる。
回転前のX,Y,Z軸のいずれか一つの軸、例えば、Z軸を中心として角速度ωで回転したときに、(X,Y,Z)から(X’,Y’,Z’)に座標変換したときのZの係数×ωの角速度が角速度センサ4#3,4#2,4#1により検出されることから、X’,Y’,Z’について、Zの係数が0とならないように(X,Y,Z)を回転すれば、Z軸を入力軸として、入力軸回りに所定の角速度ωで回転すると、角速度センサ4#1〜4#3はいずれも零ではない角速度を検出する。これには、入力軸とX’,Y’,Z’軸がそれぞれ非平行且つ非直交であれば良い。
例えば、(X,Y,Z)座標系において、ヨー角Ω、ロール角Φ、ピッチ角Θ、ヨーレートω、ロールレートφ、ピットレートθとした場合、ピッチ角Θ→ロール角Φの順に(X,Y,Z)座標系を回転、即ち、Y軸を中心にΘ回転した後、回転後のX軸を中心にΦ回転すると、変換座標後は以下のようになる。
ヨーレートω’’=ωcosΘcosΦ+φsinΘ・cosΦ−θsinΦ ・・ (1)
ロールレートφ’’=−ωsinΘ+φcosΘ ・・ (2)
ピッチレートθ’’=ωcosΘ・sinΦ+φsinΘ・sinΦ+θcosΦ
≒ωsin(ΦcosΘ)+φsinΘ・sinΦ+θcosΦ
・・(3)
Y軸を中心に(X,Y,Z)の直交座標系をΘ回転すると、回転後は、X軸の回転角X軸の回転角=Θ,Y軸の回転角=0、Z軸の回転角=Θとなる。その後、回転後のX軸を中心にΦ回転すると、X軸の回転角=Θ、Y軸の回転角=ΦcosΘ、Z軸の回転角=ACOS(cosΦ・cosΘ)となる。但し、ACOS(*)は、cosの逆関数であり、cos(ACOS(cosΦ・cosΘ))=cosΦ・cosΘである。
ロールレートφ’’=−ωsinΘ+φcosΘ ・・ (2)
ピッチレートθ’’=ωcosΘ・sinΦ+φsinΘ・sinΦ+θcosΦ
≒ωsin(ΦcosΘ)+φsinΘ・sinΦ+θcosΦ
・・(3)
Y軸を中心に(X,Y,Z)の直交座標系をΘ回転すると、回転後は、X軸の回転角X軸の回転角=Θ,Y軸の回転角=0、Z軸の回転角=Θとなる。その後、回転後のX軸を中心にΦ回転すると、X軸の回転角=Θ、Y軸の回転角=ΦcosΘ、Z軸の回転角=ACOS(cosΦ・cosΘ)となる。但し、ACOS(*)は、cosの逆関数であり、cos(ACOS(cosΦ・cosΘ))=cosΦ・cosΘである。
変換前のZ軸を中心にωで回転すると、φ=0、θ=0であることから、これらを、(1),(2),(3)に代入すると、ヨーレートω’’=ωcosΦ・cosΘ、ロールレートφ’’=−ωsinΘ、ピッチレートθ’’=ωsinΦcosΘ≒ωsin(ΦcosΘ)となる。
ところで、座標変換後のヨーレートω’’、ロールレートφ’’及びピッチレートφ’’の絶対値が大きい、即ち、変換後の3軸の感度が良好であるほど、搭載誤差の検出精度が良好となること、及びロールレートφ’’とピッチレートφ’’の搭載誤差の検出精度が同じであること、即ち、│θ’’│=│φ’’│であることが望ましいことから、X軸の回転角Θ=Y軸の回転角Φ・cosΘになるようにする。
例えば、Θ=30°、Φ・cosΘ=30°とすると、Φ=34.65°となる。このときの、ヨーレートω’’=0.71ω、ロールレートφ’’=−0.5ω、ピッチレートθ’’=0.5ωとなり、それぞれωの0.71、−0.50、0.50倍となる。また、角速度の検出範囲を−100°/sec〜100°/secとすると、ω=±100°/secとすることが望ましい。
回転角Θ,Φが与えられると、角速度センサ4#1〜4#3のパッケージへの搭載誤差がない場合のセンサ出力(以下、理想の角速度)を算出することができる。例えば、式(1),(2),(3)より、角速度センサ4#1〜4#3の理想の角速度が算出される。Θ=30°、Φ=34.65°とすると、理想のヨーレートω’’、ロールレートφ’’、ピッチレートθ’’は、それぞれωの定数倍0.71、−0.50、0.50であり、図6に示すように、Z軸まわりの角速度S0に対して、理想のヨーレートS1、ロールレートS2及びピッチレートS3が得られる。図6中の横軸に時間、縦軸に角速度を示す。
角速度補正量算出部78は、中点補正されたZ軸まわりの角速度ωでの実際のヨーレートω’、ロールレートφ’、ピッチレートθ’と理想のヨーレートω’’、ロールレートφ’’、ピッチレートθ’’から、実際のヨーレートω’、ロールレートφ’、ピッチレートθ’が理想のヨーレートω’’、ロールレートφ’’、ピッチレートθ’’に等しくなるようヨーレート、ロールレート、ピッチレートの補正量ωR,φR,θRを以下のように算出し、補正データ記憶部46に記憶する。
実際のヨーレート=理想のヨーレート×ヨーレートに関する搭載誤差成分、実際のロールレート=理想のロールレート×ロールレートに関する搭載誤差成分、実際のピッチレート=理想のピッチレート×ピッチレートに関する搭載誤差成分である。搭載誤差成分とは、角速度センサ4#1〜4#3の搭載誤差による実際の角速度と理想の角速度との誤差をいう。図6に示すように、Z軸まわりの角速度ω=±100°/secであるとき、S1’,S2’,S3’が実際のヨーレート、ロールレート、ピッチレートであるとすると、理想のヨーレート、ロールレート及びピッチレートS1,S2,S3に対する実際のヨーレート、ロールレート及びピッチレートS1,S2,S3の各比率が搭載誤差成分である。
角速度補正量算出部78は、中点補正された実際のヨーレート、ロールレート及びピッチレートに対する理想のヨーレート、ロールレート及びピッチレートの比率ωR,φR,θRをヨーレート、ロールレート及びピッチレートの補正値として補正データ記憶部46に記憶する。
中点データ取得部80は、慣性センサユニット2が車両に取り付けられてから、車両の静止状態での角速度センサ4#1〜4#3の出力値を取得し、中点データとして補正データ記憶部46に記憶する。3軸角速度センサデータ取得部82は、慣性センサユニット2が車両に取り付けられてから、車両の通常状態での角速度センサ4#1〜4#3の出力値を取得し、中点補正部84に出力する。
中点補正部84は、中点補正部76と同様に、中点データを元に車両の通常状態でのヨーレート、ロールレート及びピッチレートの中点補正をし、角速度補正部86に出力する。角速度補正部86は、中点補正部84により中点補正されたヨーレート、ロールレート及びピッチレートに補正量ωR,φR,θRを掛け合わせ、ヨーレート、ロールレート及びピッチレートの補正を行う。
図7は搭載誤差に係る補正量を算出するための補正量算出装置の構成図であり、同図(a)は斜視図、同図(b),(c)は平面図である。図7(a)に示すように、補正量算出装置100は、ターンテーブル110及び傾き台112を有する。ターンテーブル110は、重力加速度方向であるZ軸に平行に配設された図示しない回転軸を中心に該軸に連結された電動機の回転により回転可能となっている。ターンテーブル110の上面には、図7(b)に示すように、複数個のネジ穴140が設けられている。傾き台112は、下部土台120、中部土台122、上部土台124、第1の連結部126及び第2の連結部128を有する。
下部土台120は、例えば、直方体形状であり、上面から底面に貫通するネジ穴140及び側面中央にネジ穴142が設けられている。ネジ穴140にネジ止めすることにより、下部土台120がターンテーブル110の上面に水平に固定される。直方体形状の下部土台120の底面の長方形の図7(b)中左右方向をY軸、図7中(b)中上下方向をX軸で表す。
第1の連結部126は、下部土台120と中部土台122を連結するためのものであり、2つの直方体形状からなり、長手方向にネジ穴142,144が設けられている。2つの第1の連結部126は、下部土台120の底面に垂直(Z軸方向)に長手方向が配置され、ネジ穴142にネジ止めすることにより、下部土台120の底面に対して垂直に固定されている。
中部土台122は、例えば、直方体形状であり、Y軸方向に延びる側面中央に底面に平行な貫通穴が設けられ、この貫通穴及び第1の連結部126のネジ穴144に連結軸が挿入されて、第1の連結部126に支持されるとともに、連結軸(X軸)を中心に回転可能となっている。そして、連結軸を中心とする任意の中部土台122の回転角でもって、ネジ止め等により第1の連結部126に固定される。これにより、中部土台122は、X軸を中心にY軸及びZ軸が任意角Φ回転可能となっている。また、X軸方向に延びる2つの側面の中央付近にネジ穴146が設けられている。
第2の連結部128は、中部土台122と上部土台124とを連結するためのものであり、2つの直方体形状からなり、長手方向にネジ穴146,148が設けられている。2つの第2の連結部128は、中部土台122のネジ穴146にネジ止めにより中部土台122に固定されている。これにより、第2の連結部128は、中部土台122の回転とともに、回転する。
上部土台124は、例えば、直方体形状であり、X軸方向に延びる側面の中央付近に底面に平行な貫通穴が設けられ、この貫通穴及び第2の連結部128の貫通穴148に連結軸が挿入され、第2の連結部126に支持されるとともに、連結軸を中心に任意に回転可能となっている。そして、連結軸を中心とする任意の上部土台124の回転角Θでもって、ネジ止め等により第2の連結部126に固定される。これにより、上部土台124は、中部土台146の回転により第2の連結部128が回転することにより、回転するとともに、連結軸を中心として、回転する。
また、図7(c)に示すように、上部土台124には、上面から底面に垂直に貫通する2つのネジ穴150が設けられている。ネジ穴150は、慣性センサユニット2を支持・固定するためのものであり、ネジ穴150に慣性センサユニット2をネジ止めすることにより、上部土台124の上面の辺の長手方向及び上面のそれに直角な辺の方向と、慣性センサユニット2のロールレートセンサ4#2及びピッチレートセンサ4#3の検出対象軸が平行となる位置に設けられている。
中部土台122の回転角Φ、上部土台124の回転角Θとすると、中部土台122のX軸の回転角=0、Y軸の回転角Φ、Z軸の回転角=Φとなり、上部土台124のX軸の回転角=Θ、Y軸の回転角=Φ・cosΘ、Z軸の回転角=ACOS(cosΦ・cosΘ)となる。
図8は、傾き台112の上部土台124に慣性センサユニット2を固定した状態を示す図である。慣性センサユニット2のハウジング30の底面の所定の位置、例えば、ハウジング30にネジ穴150が設けられている。ネジ穴150にネジ止めすることにより、慣性センサユニット2のロールレートセンサ4#2,ピッチレートセンサ4#3の検出対象軸が上部土台124の上面の各辺に平行になるように上部土台124に固定される。
従って、ターンテーブル110をZ軸まわりにωで回転すると、理想のヨーレートはω・cosΘ・cosΦ、理想のロールレートは−ω・sinΘ、理想のピッチレートはω・cosΘ・sinΦとなる。
尚、慣性センサユニット2の上部土台124への固定は、ハウジング30がパッケージに封止されたときに設けられる車両に慣性センサ2を固定するためのフランジに設けられたネジ穴にボルト締めにより行っても良い。
上部土台124に固定された慣性センサユニット2のコネクタ34には、図示しないが、所定電圧の電源ライン(12V)の電源ライン、及びLANを通してパーソナルコンピュータ等の制御装置が接続される。試験装置は、慣性センサユニット2に中点データが出力されていること、Z軸を入力軸としてターンテーブル110が所定の角速度、例えば、±100°/secで回転されていることを指示するための装置である。
図9は補正量算出方法を示すフローチャートである。慣性センサユニット2のコネクタ34を外部の電源ライン及びLANを通して制御装置に接続する。ステップS2で慣性センサユニット2を静止状態とする。例えば、慣性センサユニット2を上部土台124に固定し、ターンテーブル110を静止した状態とする。ステップS4で制御装置からの指示に基づいてその際の3軸角速度センサ4#1〜4#3の出力値ω0、φ0、θ0(中点データ)を取得し、補正データ記憶部46に記憶する。
ステップS6で慣性センサユニット2を上部土台124にネジ止めにより固定し、上部土台124を連結軸中心にΘ=30°回転させ第2の連結部128により上部土台124を固定し、中部土台122を連結軸中心にΦ=34.65°回転させてから第1の連結部126により中部土台122を固定する。
ステップS8でZ軸を中心にターンテーブル110を角速度ω=100°/secで回転する。ステップS10で制御装置からの指示に基づいてその際の3軸角速度センサ4#1〜4#3のセンサ出力値ω1、φ1、θ1を取得する。ステップS12で3軸角速度センサ4#1〜4#3のセンサ出力値ω1、φ1、θ1を補正データ記憶部46に記憶された中点データω0、φ0、θ0を元に中点補正する。中点補正後は、ヨーレートω1’=ω1+(512−ω0)、ロールレートφ1’=φ1+(512−φ0)、ピッチレートθ1’=θ1+(512−θ0)となる。
ステップS14でZ軸を中心にターンテーブル110を角速度ω=−100°/secで回転する。ステップS16で制御装置からの指示に基づいてその際の3軸角速度センサ4#1〜4#3のセンサ出力値ω2、φ2、θ2を取得する。ステップS18で3軸角速度センサ4#1〜4#3のセンサ出力値ω2、φ2、θ2を補正データ記憶部46に記憶された中点データタω0、φ0、θ0を元に中点補正する。中点補正後は、ヨーレートω2’=ω2+(512−ω0)、ロールレートφ2’=φ2+(512−φ0)、ピッチレートθ2’=θ2+(512−θ0)となる。
ステップS20でω=100°/secでの中点補正データω1’、φ1’、θ1’及びω=−100°/secでの中点補正データω2’、φ2’、θ2’の絶対値の平均値ω3,φ3,θ3を算出する。平均値を取るのは検出誤差を小さくするためであり、絶対値を取るのは、ω=100°/secと−100°/secでは、センサ出力値ω1とω2,φ1とφ2,θ1とθ2の符号がそれぞれ逆になるからである。
ステップS22で平均値ω3,φ3,θ3と角速度ω(100°/sec)、Θ(30°)、Φ(34.65°)での理想のセンサ出力値ωI,φI,θIから補正量ωR,φR,θRを算出する。ωR=ωI/ω3、φR=−φI/φ3、θR=θI/θ3となる。ステップS24で3軸角速度センサ4#1〜4#3の補正量ωR,φR,θRを補正データ記憶部46に記憶する。
図10は3軸角速度センサ4#1〜4#3の出力値の補正方法を示すフローチャートである。慣性センサユニット2は、パッケージのフランジに設けられたネジ穴にボルト締めにより車両の付近に取り付けられる。コネクタ34には、車両に搭載された12Vのバッテリ電源が供給され、図示しないLANが接続される。
ステップS30で慣性センサユニット2の静止状態で3軸角速度センサ4#1〜4#3の出力値ω0’,θ’0,φ’0(中点デー-タ)を取得し、補正データ記憶部4に記憶する。中点値はセンサ4#1〜4#3の抵抗が温度等の車両の走行環境に依存することから、現在の走行環境に応じた値をその都度取得する必要があるからである。
ステップS32で慣性センサユニット2の通常状態で3軸角速度センサ4#1〜4#3の出力値ω4,θ4,φ4を取得する。ステップS34で3軸角速度センサ4#1〜4#3の出力値ω4,θ4,φ4を中点データω0’,θ0’,φ0’より上述したと同様にして中点補正する。中点補正後の3軸角速度センサ4#1〜4#3の出力値をω4’,θ4’,φ4’とする。
ステップS36で補正データ記憶部46より補正量ωR,θR,φRを読み出す。ステップS38で3軸角速度センサ4#1〜4#3の出力値ω4’,θ4’,φ4’を補正する。補正後の3軸角速度センサ4#1〜4#3の出力値ω5,θ5,φ5とすると、ω5=ωR×ω4’,θ5=θR×θ4’,φ5=φR×φ4’となる。
以上説明した本実施形態によれば、複数の角速度センサを有する角速度センサユニットの中点ドリフト及び搭載誤差によるゲインのずれを1回の角速度入力で補正することができるため、正確なセンサ出力を得ることができる。
2 慣性センサユニット
4#1 ヨーレートセンサ
4#2 ロールレートセンサ
4#3 ピッチレートセンサ
8 演算部
42 CPU
46 補正データ記憶部
60 3軸角速度補正量算出部
62 3軸角速度補正部
100 補正量算出装置
110 ターンテーブル
120 下部土台
122 中部土台
124 上部土台
126 第1の連結部
128 第2の連結部
4#1 ヨーレートセンサ
4#2 ロールレートセンサ
4#3 ピッチレートセンサ
8 演算部
42 CPU
46 補正データ記憶部
60 3軸角速度補正量算出部
62 3軸角速度補正部
100 補正量算出装置
110 ターンテーブル
120 下部土台
122 中部土台
124 上部土台
126 第1の連結部
128 第2の連結部
Claims (2)
- 検出対象物に取り付けられ、互いに直交する3軸のうち少なくとも2軸を検出対象軸とし、該検出対象軸を中心とする角速度を検出する少なくとも2つの角速度センサを有し、前記少なくとも2つの角度センサを一つのパッケージに収容する角速度センサユニットの出力補正方法であって、
前記少なくとも2つの角速度センサユニットを静止状態とした時の前記各角速度センサの出力より中点を決定するステップと、
前記検出対象軸の2軸とは非平行かつ非直交の入力軸まわりに前記角速度センサユニットを所定の角速度で回転したときの前記少なくとも2つの角速度センサの実際のセンサ出力値と前記入力軸まわりに前記所定の角速度で回転したときに前記角速度センサの前記パッケージへの搭載誤差がなく前記各角速度センサが角速度を検出する軸と該角速度センサの前記検出対象軸が一致するときの理想のセンサ出力値と比較して、前記各角速度センサの前記パッケージへの搭載誤差による補正値を算出するステップと、
前記中点及び前記補正値に基づいて、前記角速度センサユニットが検出対象物に取り付けられたときに前記角速度センサの出力値を補正するステップと、
を具備したことを特徴とする角速度センサユニットの出力補正方法。 - 前記決定された中点及び前記補正値を前記角速度センサユニットに設けられた補正データ記憶部に記憶させることを特徴とする請求項1記載の角速度センサユニットの出力補正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005373760A JP2007178138A (ja) | 2005-12-27 | 2005-12-27 | 角速度センサユニットの出力補正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005373760A JP2007178138A (ja) | 2005-12-27 | 2005-12-27 | 角速度センサユニットの出力補正方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007178138A true JP2007178138A (ja) | 2007-07-12 |
Family
ID=38303494
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005373760A Withdrawn JP2007178138A (ja) | 2005-12-27 | 2005-12-27 | 角速度センサユニットの出力補正方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007178138A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018070103A1 (ja) * | 2016-10-13 | 2018-04-19 | 株式会社プロドローン | 着脱式ユニットおよびこれを用いたセンサ較正方法 |
| WO2018100964A1 (ja) * | 2016-11-30 | 2018-06-07 | パイオニア株式会社 | 初期化装置、初期化方法及び初期化装置用プログラム |
| KR20200082395A (ko) * | 2018-12-28 | 2020-07-08 | 한국생산기술연구원 | Ahrs 센서, 그 바이어스 및 스케일 오차 보정 장치 및 방법 |
| CN121576995A (zh) * | 2026-01-22 | 2026-02-27 | 深圳北斗通信科技有限公司 | 基于特定空间角度的mems传感器倾角测量优化方法 |
-
2005
- 2005-12-27 JP JP2005373760A patent/JP2007178138A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018070103A1 (ja) * | 2016-10-13 | 2018-04-19 | 株式会社プロドローン | 着脱式ユニットおよびこれを用いたセンサ較正方法 |
| JPWO2018070103A1 (ja) * | 2016-10-13 | 2019-02-28 | 株式会社プロドローン | 着脱式ユニットおよびこれを用いたセンサ較正方法 |
| WO2018100964A1 (ja) * | 2016-11-30 | 2018-06-07 | パイオニア株式会社 | 初期化装置、初期化方法及び初期化装置用プログラム |
| KR20200082395A (ko) * | 2018-12-28 | 2020-07-08 | 한국생산기술연구원 | Ahrs 센서, 그 바이어스 및 스케일 오차 보정 장치 및 방법 |
| KR102143462B1 (ko) | 2018-12-28 | 2020-08-11 | 한국생산기술연구원 | Ahrs 센서, 그 바이어스 및 스케일 오차 보정 장치 및 방법 |
| CN121576995A (zh) * | 2026-01-22 | 2026-02-27 | 深圳北斗通信科技有限公司 | 基于特定空间角度的mems传感器倾角测量优化方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101059384B (zh) | 一种捷联mems惯性测量单元及安装误差标定方法 | |
| JP5043358B2 (ja) | 傾斜角演算方法及び傾斜角演算装置 | |
| US7231825B2 (en) | Accelerometer based tilt sensor and method for using same | |
| EP2789982B1 (en) | Methods and apparatus for calibrating transducer-including devices | |
| JP2004502951A (ja) | 座標測定マシン(cmm)の振動に起因した座標測定誤差を補正する方法および装置 | |
| Bernstein et al. | Development of air spindle and triaxial air bearing testbeds for spacecraft dynamics and control experiments | |
| JP2009002735A (ja) | 角速度検出装置 | |
| JP4879495B2 (ja) | 加速度測定装置 | |
| JP4751085B2 (ja) | センサの組立方法 | |
| US20130312518A1 (en) | Inertial unit having vibrating gyros mounted on a carousel, and an angle-measurement method | |
| JP2007178138A (ja) | 角速度センサユニットの出力補正方法 | |
| US20230324174A1 (en) | Inertial force sensor | |
| KR102143462B1 (ko) | Ahrs 센서, 그 바이어스 및 스케일 오차 보정 장치 및 방법 | |
| JP2022075076A (ja) | 多軸慣性力センサの製造方法 | |
| CN206601240U (zh) | 车载姿态谱测量装置 | |
| JP2005106749A (ja) | 慣性センサユニット、及びその製造方法 | |
| JP2005147696A (ja) | 取り付け角度算出装置 | |
| JP5697149B2 (ja) | 加速度センサ特性評価方法及びプログラム | |
| WO2019111559A1 (ja) | 移動ロボットの制御装置および移動ロボットシステム | |
| JPH06324066A (ja) | 回転面保存型角速度センサ | |
| CN113167585B (zh) | 惯性测量装置 | |
| JPH11344339A5 (ja) | ||
| JP2015114286A (ja) | 角速度センサの校正装置及びその校正方法 | |
| WO2022249292A1 (ja) | 姿勢センサーのキャリブレーション装置 | |
| KR101721924B1 (ko) | 지자기 측정 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20090303 |