JP2007178152A - 異物検査装置及び露光装置 - Google Patents
異物検査装置及び露光装置 Download PDFInfo
- Publication number
- JP2007178152A JP2007178152A JP2005374138A JP2005374138A JP2007178152A JP 2007178152 A JP2007178152 A JP 2007178152A JP 2005374138 A JP2005374138 A JP 2005374138A JP 2005374138 A JP2005374138 A JP 2005374138A JP 2007178152 A JP2007178152 A JP 2007178152A
- Authority
- JP
- Japan
- Prior art keywords
- inspection
- light
- foreign matter
- pellicle
- illumination system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Preparing Plates And Mask In Photomechanical Process (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
【課題】被検査面の位置が異なる場合であっても異物の検査を行うことができる異物検査装置、及び当該異物検査装置を備える露光装置を提供する。
【解決手段】第1照明系31aは検査光L1をレチクルRの上面に照射し、第2照明系31bは検査光L2をペリクルPの面上に照射する。また、第1受光系はレチクルRの上面に付着した異物からの散乱光を受光し、第1ラインセンサは第1受光系で受光された散乱光の光強度に応じた信号を出力する。同様に、第2受光系はペリクルPの上面に付着した異物からの散乱光を受光し、第2ラインセンサは第1受光系で受光された散乱光の光強度に応じた信号を出力する。駆動装置39は、第2照明系31bをZ方向に移動させてペリクルPのペリクル高さに応じて検査光L2の照射位置を可変する。
【選択図】図3
【解決手段】第1照明系31aは検査光L1をレチクルRの上面に照射し、第2照明系31bは検査光L2をペリクルPの面上に照射する。また、第1受光系はレチクルRの上面に付着した異物からの散乱光を受光し、第1ラインセンサは第1受光系で受光された散乱光の光強度に応じた信号を出力する。同様に、第2受光系はペリクルPの上面に付着した異物からの散乱光を受光し、第2ラインセンサは第1受光系で受光された散乱光の光強度に応じた信号を出力する。駆動装置39は、第2照明系31bをZ方向に移動させてペリクルPのペリクル高さに応じて検査光L2の照射位置を可変する。
【選択図】図3
Description
本発明は、半導体素子、液晶表示素子等のデバイスの製造に用いられるレチクルの表面又は当該レチクルに張架されたペリクルの表面等の被検査面上における異物を検査する異物検査装置及び当該異物検査装置を備える露光装置に関する。
半導体素子、液晶表示素子、撮像装置(CCD(Charge Coupled Device:電荷結合素子)等)、薄膜磁気ヘッド等のデバイスの製造工程の一つであるリソグラフィ工程においては、露光装置を用いてマスクとしてのレチクルのパターンを、投影光学系を介して基板としてのフォトレジストが塗布されたウェハ(又はガラスプレート等)上に転写露光する処理が繰り返し行われる。レチクルのガラス面上、又はレチクルに張架されたペリクル面上に埃や塵等の異物が付着していると、レチクルに形成されたパターンとともに異物の形状が基板上に露光転写されて欠陥となる虞がある。このため、露光装置は、レチクルのパターンを基板上に露光転写する前に、レチクルのガラス基板及びペリクルの表面上の異物の有無、その大きさ、及び位置を検査する異物検査装置を備えている。
異物検査装置は、レチクルのガラス基板の表面及びペリクルの表面(以下、これらの面を総称する場合には被検査面という)に対して検査光を照射し、被検査面上の異物によって生ずる散乱光を検出することで被検査面上の異物の有無、大きさ、及び位置を検査する。かかる検査を検査光に対してレチクルを移動させつつ行うことで、被検査面全体の異物の有無、大きさ、及び位置が検査される。尚、従来の異物検査装置の詳細については、例えば以下の特許文献1,2を参照されたい。
特開2001−159613号公報
特開2001−264262号公報
ところで、レチクルの規格は複数存在するため、ペリクル高さ(ガラス基板からペリクルの張架位置までの距離)は一定ではない。従来の異物検査装置は1つの規格のペリクル高さに合わせて検査光の照射位置が設定されているため、ペリクル高さが異なる他の規格で作製されたレチクルの検査を行うことができない。このため、従来は、あるレチクルを用いて露光処理を行うとしたときに、そのレチクルのペリクル高さが異物検査装置に適合しないときには、異物検査装置に適合したペリクル高さを有する同一パターンのレチクルを新規に作製する必要があった。
しかしながら、近年においてはデバイスの製造コストの低減が要求されており、同一のパターンを有するレチクルを異物検査装置のペリクル高さの規格に合わせて複数作製することは望ましくない。このため、露光装置に設けられている異物検査装置に適合しないペリクル高さを有するレチクルをその露光装置で用いる場合には、まずそのレチクルを検査することができる他の露光装置に設けられた異物検査装置で検査を行い、次に検査済みのレチクルをその露光装置まで搬送して露光処理を行う必要があった。ところが、かかる作業を行うと露光装置間でレチクルを搬送する際に、レチクルに異物が付着する虞がある。このため、異物検査装置による検査が無意味になるとともに、デバイスの不良が発生する可能性が高くなる虞があった。
本発明は上記事情に鑑みてなされたものであり、被検査面の位置が異なる場合であっても異物の検査を行うことができる異物検査装置、及び当該異物検査装置を備える露光装置を提供することを目的とする。
本発明は、実施の形態に示す各図に対応付けした以下の構成を採用している。但し、各要素に付した括弧付き符号はその要素の例示に過ぎず、各要素を限定するものではない。
上記課題を解決するために、本発明の異物検査装置は、検査光(L1、L2)を被検査面に照射する照明系(31a、31b)と、前記被検査面に付着した異物(D、D1、D2)からの散乱光を受光する受光系(32a、32b)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、33b)とを備える異物検査装置(DI)において、前記照明系の少なくとも一部を移動させて前記被検査面に対する前記検査光の照射位置を可変する駆動装置(39)を備えることを特徴としている。
この発明によると、照明系の少なくとも一部が駆動装置によって移動され、被検査面対する検査光の照明位置が可変される。
また、本発明の異物検査装置は、検査光(L1、L2)を被検査面に照射する照明系(31a、31b)と、前記被検査面に付着した異物(D、D1、D2)からの散乱光を受光する受光系(32a、32b)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、33b)とを備える異物検査装置(DI)において、異なる高さ位置に設定される前記被検査面の各々に対応して設けられ、各々の被検査面に対して前記検査光を同一の入射角で照射する複数の照明系(31b、31c)を備えることを特徴としている。
この発明によると、被検査面の高さ位置に応じて複数設けられた照明系の内からその被検査面に対応して設けられた照明系を用いて被検査面が照射されて被検査面の検査が行われる。
また、本発明の異物検査装置は、検査光(L1、L2)を被検査面に照射する照明系(31a、31b)と、前記被検査面に付着した異物(D、D1、D2)からの散乱光を受光する受光系(32a、32b)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、33b)と、前記被検査面とされる面を有する物体(R)と前記検査光との所定の関係を保ちつつ前記物体を搬送する搬送装置(AR)とを備える異物検査装置(DI)において、前記搬送装置は、前記被検査面に交差する方向の位置が可変であることを特徴としている。
この発明によると、被検査面とされる面を有する物体の面位置に応じて、物体を搬送する搬送装置により被検査面に交差する方向の位置が可変される。
更に、本発明の異物検査装置は、検査光(L1、L4)を被検査面に照射する照明系(31a、51)と、前記被検査面に付着した異物(D1、D2)からの散乱光を受光する受光系(32a、52)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、53)とを備える異物検査装置(DI)において、前記照明系は、前記被検査面の面位置に拘わらず前記被検査面内の所定方向に関して前記被検査面の全体に前記検査光を照射する照射部材(58)を備えることを特徴としている。
この発明によると、照射部材によって被検査面の面位置に拘わらず、被検査面内の所定方向に関して前検査面の全体に検査光が照射される。
本発明の露光装置は、上記の何れかに記載の異物検査装置を備えることを特徴としている。
上記課題を解決するために、本発明の異物検査装置は、検査光(L1、L2)を被検査面に照射する照明系(31a、31b)と、前記被検査面に付着した異物(D、D1、D2)からの散乱光を受光する受光系(32a、32b)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、33b)とを備える異物検査装置(DI)において、前記照明系の少なくとも一部を移動させて前記被検査面に対する前記検査光の照射位置を可変する駆動装置(39)を備えることを特徴としている。
この発明によると、照明系の少なくとも一部が駆動装置によって移動され、被検査面対する検査光の照明位置が可変される。
また、本発明の異物検査装置は、検査光(L1、L2)を被検査面に照射する照明系(31a、31b)と、前記被検査面に付着した異物(D、D1、D2)からの散乱光を受光する受光系(32a、32b)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、33b)とを備える異物検査装置(DI)において、異なる高さ位置に設定される前記被検査面の各々に対応して設けられ、各々の被検査面に対して前記検査光を同一の入射角で照射する複数の照明系(31b、31c)を備えることを特徴としている。
この発明によると、被検査面の高さ位置に応じて複数設けられた照明系の内からその被検査面に対応して設けられた照明系を用いて被検査面が照射されて被検査面の検査が行われる。
また、本発明の異物検査装置は、検査光(L1、L2)を被検査面に照射する照明系(31a、31b)と、前記被検査面に付着した異物(D、D1、D2)からの散乱光を受光する受光系(32a、32b)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、33b)と、前記被検査面とされる面を有する物体(R)と前記検査光との所定の関係を保ちつつ前記物体を搬送する搬送装置(AR)とを備える異物検査装置(DI)において、前記搬送装置は、前記被検査面に交差する方向の位置が可変であることを特徴としている。
この発明によると、被検査面とされる面を有する物体の面位置に応じて、物体を搬送する搬送装置により被検査面に交差する方向の位置が可変される。
更に、本発明の異物検査装置は、検査光(L1、L4)を被検査面に照射する照明系(31a、51)と、前記被検査面に付着した異物(D1、D2)からの散乱光を受光する受光系(32a、52)と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子(33a、53)とを備える異物検査装置(DI)において、前記照明系は、前記被検査面の面位置に拘わらず前記被検査面内の所定方向に関して前記被検査面の全体に前記検査光を照射する照射部材(58)を備えることを特徴としている。
この発明によると、照射部材によって被検査面の面位置に拘わらず、被検査面内の所定方向に関して前検査面の全体に検査光が照射される。
本発明の露光装置は、上記の何れかに記載の異物検査装置を備えることを特徴としている。
本発明によれば、照明系の少なくとも一部を移動させて被検査面対する検査光の照明位置を可変しているため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
また、本発明によれば、異なる高さ位置に設定される前記被検査面の各々に対応して照明系を設けており、被検査面の高さ位置に応じてその対応付けられた照明系を用いて被検査面を照明しているため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
また、本発明によれば、被検査面とされる面を有する物体の面位置に応じて、物体を搬送する搬送装置により被検査面に交差する方向の位置が可変されるため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
更に、本発明によれば、照射部材によって被検査面の面位置に拘わらず、被検査面内の所定方向に関して前検査面の全体に検査光が照射されるため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
また、本発明によれば、異なる高さ位置に設定される前記被検査面の各々に対応して照明系を設けており、被検査面の高さ位置に応じてその対応付けられた照明系を用いて被検査面を照明しているため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
また、本発明によれば、被検査面とされる面を有する物体の面位置に応じて、物体を搬送する搬送装置により被検査面に交差する方向の位置が可変されるため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
更に、本発明によれば、照射部材によって被検査面の面位置に拘わらず、被検査面内の所定方向に関して前検査面の全体に検査光が照射されるため、被検査面の位置が異なる場合であっても異物の検査を行うことができるという効果がある。
以下、図面を参照して本発明の実施形態による異物検査装置及び露光装置について詳細に説明する。尚、以下では、最初に露光装置の全体構成について簡単な説明を行い、次いで異物検査装置について詳細な説明を行う。
〔露光装置〕
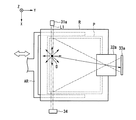
図1は、本発明の一実施形態による露光装置の概略構成を示す側面図である。図1においては、半導体素子を製造するための露光装置であって、投影光学系PLに対してマスクとしてのレチクルRと基板としてのウェハWとを同期移動させつつ、レチクルRに形成されたパターンDPを逐次ウェハW上に転写するステップ・アンド・スキャン方式の縮小投影型の露光装置を例に挙げる。
図1は、本発明の一実施形態による露光装置の概略構成を示す側面図である。図1においては、半導体素子を製造するための露光装置であって、投影光学系PLに対してマスクとしてのレチクルRと基板としてのウェハWとを同期移動させつつ、レチクルRに形成されたパターンDPを逐次ウェハW上に転写するステップ・アンド・スキャン方式の縮小投影型の露光装置を例に挙げる。
尚、以下の説明においては、必要であれば図中にXYZ直交座標系を設定し、このXYZ直交座標系を参照しつつ各部材の位置関係について説明する。図1に示すXYZ直交座標系は、X軸及びY軸がウェハWの移動面に平行な面に含まれるよう設定され、Z軸が投影光学系PLの光軸AXに沿う方向に設定される。また、本実施形態ではレチクルR及びウェハWを同期移動させる方向(走査方向)をY方向に設定されているものとする。
図1に示す露光装置EXは、レチクルR上のX方向に延びるスリット状(矩形状又は円弧状)の照明領域を均一な照度を有する露光光ELで照明する照明光学系ILSと、レチクルRを保持するレチクルステージRSTと、レチクルRのパターンDPの像をフォトレジストが塗布されたウェハW上に投影する投影光学系PLと、ウェハWを保持するウェハステージWSTと、これらを制御する主制御系MCとを含んで構成されている。また、露光装置EXは、レチクルRの表面上及びレチクルRに張架されたペリクルP(図2〜図4参照)の表面上における異物を検査する異物検査装置DIを備えている。
照明光学系ILSは、光源ユニット、オプティカル・インテグレータを含む照度均一化光学系、ビームスプリッタ、集光レンズ系、レチクルブラインド、及び結像レンズ系等(何れも不図示)を含んで構成されている。この照明光学系の構成等については、例えば特開平9−320956に開示されている。ここで、上記の光源ユニットとしては、KrFエキシマレーザ(波長248nm)、ArFエキシマレーザ(波長193nm)、若しくはF2レーザ光源(波長157nm)、Kr2レーザ光源(波長146nm)、Ar2レーザ光源(波長126nm)等の紫外レーザ光源、銅蒸気レーザ光源、YAGレーザの高調波発生光源、固体レーザ(半導体レーザ等)の高調波発生装置、又は水銀ランプ(i線等)等を使用することができる。
レチクルステージRSTは、真空吸着又は静電吸着等によりレチクルRを保持するものであり、照明光学系の下方(−Z方向)に水平に配置されたレチクル支持台(定盤)11の上面上で走査方向(Y方向)に所定ストロークで移動可能に構成されている。また、このレチクルステージRSTは、レチクル支持台11に対してX方向、Y方向、及びZ軸回りの回転方向(θZ方向)にそれぞれ微小駆動可能に構成されている。
レチクルステージRST上の一端には移動鏡12が設けられており、レチクル支持台11上にはレーザ干渉計(以下、レチクル干渉計という)13が配置されている。レチクル干渉計13は、移動鏡12の鏡面にレーザ光を照射してその反射光を受光することにより、レチクルステージRSTのX方向、Y方向、及びZ軸回りの回転方向(θZ方向)の位置を検出する。レチクル干渉計13により検出されたレチクルステージRSTの位置情報は、露光装置EX全体の動作を統轄制御する主制御系MCに供給される。主制御系MCは、レチクルステージRSTを駆動するレチクル駆動装置14を介してレチクルステージRSTの動作を制御する。
投影光学系PLは、複数の屈折光学素子(レンズ素子)を含んで構成され、物体面(レチクルR)側と像面(ウェハW)側との両方がテレセントリックで所定の縮小倍率β(βは例えば1/4,1/5等)を有する屈折光学系が使用されている。この投影光学系PLの光軸AXの方向は、XY平面に直交するZ方向に設定されている。尚、投影光学系PLが備える複数のレンズ素子の硝材は、露光光ELの波長に応じて、例えば石英又は蛍石が用いられる。また、本実施形態では、レチクルRに形成されたパターンDPの倒立像をウェハW上に投影する投影光学系PLを例に挙げて説明するが、勿論パターンDPの正立像を投影するものであっても良い。
ウェハステージWSTは、投影光学系PLの下方(−Z方向)に配置されており、真空吸着又は静電吸着等によりウェハWを保持する。このウェハステージWSTは、ウェハ支持台(定盤)15の上面上で走査方向(Y方向)に所定ストロークで移動可能に構成されているとともに、X方向及びY方向にステップ移動可能に構成されており、更にZ方向へ微動(X軸回りの回転及びY軸回りの回転を含む)可能に構成されている。このウェハステージWSTによって、ウェハWをX方向及びY方向へ移動させることができ、またウェハWのZ方向の位置及び姿勢(X軸周りの回転及びY軸周りの回転)を調整することができる。
ウェハステージWST上の一端には移動鏡16が設けられており、ウェハステージWSTの外部にはレーザ光を移動鏡16の鏡面(反射面)に照射するレーザ干渉計(以下、ウェハ干渉計という)17が設けられている。このウェハ干渉計17は、移動鏡16の鏡面にレーザ光を照射してその反射光を受光することによりウェハステージWSTのX方向及びY方向の位置、並びに姿勢(X軸,Y軸,Z軸周りの回転θX,θY,θZ)を検出する。ウェハ干渉計17の検出結果は主制御系MCに供給される。主制御系MCは、ウェハ干渉計17の検出結果に基づいてウェハ駆動装置18を介してウェハステージWSTの位置及び姿勢を制御する。
また、本実施形態の露光装置EXは、送光系19a及び受光系19bから構成され、投影光学系PLに関してレチクルR上の照明領域と共役なウェハW上の露光スリット領域の内部及びその近傍に設定された複数の検出点でそれぞれウェハWの表面のZ方向(光軸AX方向)の位置を検出する多点AFセンサ19を投影光学系PLの側方に備える。多点AFセンサ19は、投影光学系PLの光軸AX方向におけるウェハWの表面位置及び姿勢(X軸,Y軸周りの回転θX,θY:レベリング)を検出するものである。
この多点AFセンサ19の検出結果は主制御系MCに供給される。主制御系MCは、多点AFセンサ19の検出結果に基づいてウェハ駆動装置18を介してウェハステージWSTの位置及び姿勢を制御する。具体的には、主制御系MCには予めウェハWの表面を合わせ込む基準となる基準面(以下、AF面という)が設定されており、主制御系MCは多点AFセンサ19の検出結果に基づいてウェハWの表面がAF面に一致するようウェハステージWSTの位置及び姿勢を制御する。
更に、本実施形態の露光装置EXは、投影光学系PLのY方向の側面に、ウェハW上に設定されたショット領域に付設されたアライメントマークを観察するための画像処理方式のオフ・アクシス方式のアライメントセンサ20が配置されている。アライメントセンサ20の観察結果(計測結果)は、主制御系MCに供給される。アライメントセンサ20の光学系の光軸は、投影光学系PLの光軸AXと平行とされている。かかるアライメントセンサ20の詳細な構成は、例えば特開平9−219354号公報及びこれに対応する米国特許第5,859,707号等に開示されている。主制御系MCは、アライメントセンサ20の計測結果を用いてEGA計測を行う。ここで、EGA計測とは、ウェハWに形成された代表的な数個のアライメントマークの計測結果を用いて所定の統計演算(EGA演算)を行い、ウェハW上に設定された全てのショット領域の配列を求める計測方法である。
また、本実施形態の露光装置EXは、上述したレチクルステージRSTの側方に、レチクルライブラリ21、レチクル搬送装置22、及び異物検査装置DIを備える。尚、図1では、これらがレチクルステージRSTの−Y方向に配置されている例を図示しているが、これらの配置位置は、レチクルステージRSTの+Y方向であっても良く、又はレチクルステージRSTの±X方向であっても良い。レチクルライブラリ21はZ方向に配列された複数の支持板(図示省略)を備えており、各支持板上にはレチクルRがそれぞれ載置されている。このレチクルライブラリ21は、スライド機構(図示省略)によってZ方向に移動自在に支持されている。レチクルライブラリ21のZ方向への移動は、主制御系MCによって制御される。
レチクル搬送系22は、主制御系MCの制御の下で、レチクルライブラリ21と異物検査装置DIとの間、又は異物検査装置DIとレチクルステージRSTとの間でレチクルRの搬送を行う。具体的には、レチクル搬送系22は、レチクルライブラリ21、異物検査装置DI、及びレチクルステージRST間で移動可能な搬送アームAR(図2〜図4参照)を備えており、このアーム上にレチクルRを載置して搬送する。また、レチクル搬送系22は、各レチクルRの側面に貼付されたバーコードを読み取る読み取り装置23を備えている。読み取り装置23で読み取られた情報は主制御系MCに供給される。
レチクルRに関する情報(形成されているパターンの種類、透過率、平坦度、ペリクル高さ(ガラス基板からペリクルの張架位置までの距離)等を示す情報)は、レチクルRに貼付されたバーコードと対応付けて予め主制御系MCに記憶されている。レチクルRに貼付されたバーコードが読み取り装置23で読み取られて主制御系MCに供給されることにより、主制御系MCはそのバーコードに対応付けられているレチクルRに関する情報を得ることができる。尚、使用するレチクルRが多い場合には、露光装置EXを管理するホストコンピュータ(図示省略)に、バーコードに対応付けられているレチクルRに関する情報を記憶させておき、読み取り装置23で読み取られたバーコードが主制御系MCに供給されたときに、主制御系MCがホストコンピュータからそのバーコードに対応付けられているレチクルRに関する情報を取得するのが望ましい。
異物検査装置DIは、レチクルRの表面上及びレチクルRに張架されたペリクルの表面上における異物を検査し、その検査結果を主制御系MCに出力する。詳細は後述するが、本実施形態の異物検査装置DIは、レチクルRの上面(パターンDPが形成されていない面)と、パターンDPが形成されている面に張架されたペリクルの表面との同時検査が可能である。また、ペリクル高さを自動的に求めることも可能である。次に、異物検査装置DIについて詳細に説明する。
〔異物検査装置〕
〈第1実施形態〉
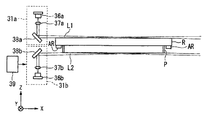
図2は本発明の第1実施形態による異物検査装置を示す平面図であり、図3は同異物検査装置を示す正面図であり、図4は同異物検査装置を示す側面図である。図2〜図4に示す通り、本実施形態の異物検査装置DIは、フォーク状の搬送アームAR上に載置されたレチクルRの上面(パターDPが形成されていない面)と、パターンDPが形成されている面に張架されたペリクルPの表面とにおける異物Dの有無、大きさ、及び位置を検査する。尚、詳細は後述するが、搬送アームARは、Y方向に移動可能である。
〈第1実施形態〉
図2は本発明の第1実施形態による異物検査装置を示す平面図であり、図3は同異物検査装置を示す正面図であり、図4は同異物検査装置を示す側面図である。図2〜図4に示す通り、本実施形態の異物検査装置DIは、フォーク状の搬送アームAR上に載置されたレチクルRの上面(パターDPが形成されていない面)と、パターンDPが形成されている面に張架されたペリクルPの表面とにおける異物Dの有無、大きさ、及び位置を検査する。尚、詳細は後述するが、搬送アームARは、Y方向に移動可能である。
異物検査装置DIは、第1照明系31a及び第2照明系31b、第1受光系32a及び第2受光系32b、光電検出素子としての第1ラインセンサ33a及び第2ラインセンサ33b、並びにラインセンサ34を含んで構成される。第1照明系31aは、−X側から+X方向に向けてシートビーム状に整形された検査用のレーザ光(以下、検査光という)L1をレチクルRの上面に照射する。第2照明系31bは、−X側から+X方向に向けてシートビーム状に整形された検査光L2をペリクルPの面上に照射する。
第1受光系32aは、第1照明系31aからの検査光L1がレチクルRの上面における異物Dに照射されて生ずる散乱光を受光する。第2受光系32bは、第2照明系31bからの検査光L2がペリクルPの面上における異物Dに照射されて生ずる散乱光を受光する。また、第1ラインセンサ33aは、第1受光系32aで受光された散乱光の光強度に応じた信号を出力する。第2ラインセンサ33bは、第2受光系32bで受光された散乱光の光強度に応じた信号を出力する。第1ラインセンサ33a及び第2ラインセンサ33bから出力される信号は主制御系MCに供給される。
尚、第1ラインセンサ33aは、第1受光系32aに関して、その受光面がレチクルRの上面内における検査光L1の照射面と共役となるように配置されている。同様に、第2ラインセンサ33bは、第2受光系32bに関して、その受光面がペリクルPの面内における検査光L2の照射面と共役となるように配置されている。ラインセンサ34は、第2照明系31bからの検査光L2を受光し、その受光位置を検出する。尚、詳細は後述するが、ラインセンサ34は、ペリクル高さを検出するために設けられる。
第1照明系31aは、光源36a、コリメートレンズ37a、及びミラー38aを含んで構成される。光源36aは、例えば半導体レーザダイオードであり、所定の角度で発散するレーザ光を−Z方向に射出する。コリメートレンズ37aは、光源36aから射出されるレーザ光を平行光に変換する。ミラー38aは、コリメートレンズ37aを介したレーザ光を+X方向に偏向して検査光L1とする。このミラー38aは、レチクルRの上面に対する検査光L1の入射角が80°程度又はそれ以上になるようコリメートレンズ37aを介したレーザ光を+X方向に偏向する。
同様に、第2照明系31bは、光源36b、コリメートレンズ37b、及びミラー38bを含んで構成される。光源36bは、例えば半導体レーザダイオードであり、所定の角度で発散するレーザ光を+Z方向に射出する。コリメートレンズ37bは、光源36bから射出されるレーザ光を平行光に変換する。ミラー38bは、コリメートレンズ37bを介したレーザ光を+X方向に偏向して検査光L2とする。このミラー38bは、ペリクルPの面に対する検査光L2の入射角が80°程度又はそれ以上になるようコリメートレンズ37bを介したレーザ光を+X方向に偏向する。
本実施形態の異物検査装置DIは、第2照明系31bをZ方向に移動させてペリクルの面に対する検査光L2の照射位置を可変する駆動装置39を備える。この駆動装置39は、ペリクル高さが異なるレチクルRの検査を可能にするために設けられる。尚、駆動装置39は、図1に示す主制御系MCの下で第2照明系31bをZ方向に移動させる。ここで、ペリクル高さが図3に示すペリクルPのペリクル高さとは異なるレチクルRが搬送アームAR上に載置されている場合を考える。尚、以下の説明では、図3,図4に示すペリクルPのペリクル高さ(即ち、搬送アームARで所定の高さ位置にレチクルRを保持したときに、第2照明系31bからの検査光L2がペリクルPの面上に照射されるよう設計されたペリクル高さ)を「基準ペリクル高さ」という。
図5は、ペリクル高さが異なるレチクルRの検査を行う場合の照明系の説明図である。尚、図5は、図3に対応する正面図である。図5(a)に示す通り、ガラス基板の厚みは図3に示すレチクルRのガラス基板の厚みと同じであるが、ペリクル高さが基準ペリクル高さよりも低いレチクルRが搬送アームAR上に載置されているとする。このレチクルRは、ガラス基板の厚みが図3に示すレチクルRと同じであるため、搬送アームARのZ方向の位置が図3に示すZ方向の位置と同じ場合には、第1照明系31aからの検査光L1は入射角が80°程度又はそれ以上と大きくても常にレチクルRの上面に照射される。
これに対し、ペリクル高さが基準ペリクル高さよりも低い場合には、搬送アームARのZ方向の位置が図3に示すZ方向の位置と同じであっても、ペリクルPの面は、図3に示すペリクルPの面よりも+Z方向にずれることになる。この状態では、検査光L2の入射角は80°程度又はそれ以上と大きいため、図5(a)に示す通り、検査光L2がペリクルPの面に照射されない。これにより、ペリクルPの面上における異物Dの検査を行うことができくなる。
そこで、図5(b)に示す通り、駆動装置39により第2照明系31bを+Z方向に移動させると、検査光L2の照射位置が変化するためペリクル高さが異なる場合であってもペリクルPの面上に検査光L2を照射することができるようになる。尚、ガラス基板の厚みは図3に示すレチクルRのガラス基板の厚みと同じであるが、ペリクル高さが基準ペリクル高さよりも高いレチクルRが搬送アームAR上に載置されている場合には、駆動装置39により第2照明系31bを−Z方向に移動させれば、検査光L2をペリクルPの面上に照射させることができる。
尚、以上の説明では、駆動装置39が第2照明系31bをZ方向に移動させる構成を例に挙げたが、図5(c)に示す通り、駆動装置39が第2照明系31bに含まれるミラー38bのみをZ方向に移動させる構成であっても良い。また、仮にレチクルRのガラス基板の厚みが異なるものがある場合には、第1照明系31aをZ方向に移動させる駆動装置、又は第1照明系31aに含まれるミラー38aのみをZ方向に移動させる駆動装置を更に備える構成であっても良い。
図6は、ペリクル高さが異なるレチクルRの検査を行う場合の受光系の説明図である。尚、図6は、図4に対応する側面図であり、搬送アームAR、受光系32a、及び第1ラインセンサ33aについては図示を省略している。前述した通り、第2ラインセンサ33bは、ペリクルPのペリクル高さが基準ペリクル高さである場合に、第2受光系32bに関して、その受光面がペリクルPの面内における検査光L2の照射面と共役となるように配置されている。このため、図6に示す通り、ペリクルPのペリクル高さが基準ペリクル高さZ0である場合には、ペリクルPの面上にある微小な異物D1からの散乱光は第2受光系32bを介して第2ラインセンサ33bの受光面上の点f1に集光される。
これに対し、図6に示す通り、ペリクルPのペリクル高さが基準ペリクル高さZ0よりも低いZ1である場合には、このペリクルPの面上にある微小な異物D2からの散乱光は第2受光系32bを介しても第2ラインセンサ33bの受光面上の点f1とは異なる点f2に集光される。この点f2は、第2ラインセンサ33bの受光面上の点ではないため、異物D2の光学像は第2ラインセンサ33bの受光面上においてぼけてしまい、検査精度の悪化を招いてしまう。このため、本実施形態では、ペリクル高さが基準ペリクル高さとは異なるレチクルRの検査を行う場合であっても、ペリクルPの面内における検査光L2の照射面と第2ラインセンサ33bの受光面との共役関係が保たれるよう対策が施されている。
図7は、ペリクル高さが変化してもペリクルPの面と第2ラインセンサ33bの受光面との共役関係を保つ構成を説明するための図である。図7(a)に示す例では、第2受光系32bの内部にズーム光学系等の第2受光系32bの焦点位置を可変とする光学系が設けられており、また、図1に示す主制御系MCの制御の下で第2受光系32bの焦点位置を調整する焦点可変装置としての調整装置40が設けられている。かかる構成において、ペリクルPのペリクル高さが基準ペリクル高さZ0である場合には、調整装置40は、図6に示す通り、ペリクルPの面上にある微小な異物D1からの散乱光が第2受光系32bを介して第2ラインセンサ33bの受光面上の点f1に集光されるよう第2受光系32bの焦点位置を調整する。
これに対し、ペリクルPのペリクル高さが基準ペリクル高さZ0よりも低いZ1である場合には、図7(a)に示す通り、このペリクルPの面上にある微小な異物D2からの散乱光が受光系32bを介して第2ラインセンサ33bの受光面上の点f3に集光されるよう調整装置40が第2受光系32bの焦点位置を調整する。これにより、ペリクル高さが基準ペリクル高さZ0とは異なるZ1であっても、ペリクルPの面内における検査光L2の照射面と第2ラインセンサ33bの受光面との共役関係が保たれる。尚、かかる焦点位置の調整を行った場合には、ペリクル高さが基準ペリクル高さZ0であるペリクルP上にある微小な異物D1からの散乱光は第2受光系32bを介して第2ラインセンサ33bの受光面上にはない点f4に集光される。
また、図7(b)に示す例では、図1に示す主制御系MCの制御の下で第2ラインセンサ33bを移動させる素子駆動装置としての移動装置41が設けられている。かかる構成において、ペリクルPのペリクル高さが基準ペリクル高さZ0である場合には、調整装置40は、図6に示す通り、ペリクルPの面上にある微小な異物D1からの散乱光が第2受光系32bを介して集光される点f1が第2ラインセンサ33bの受光面上に位置するように第2ラインセンサ33bを移動させる。
これに対し、ペリクルPのペリクル高さが基準ペリクル高さZ0よりも低いZ1である場合には、図7(b)に示す通り、このペリクルPの面上にある微小な異物D2からの散乱光が受光系32bを介して集光される点f2が第2ラインセンサ33bの受光面上に位置するように第2ラインセンサ33bを移動させる。これにより、ペリクル高さが基準ペリクル高さZ0とは異なるZ1であっても、ペリクルPの面内における検査光L2の照射面と第2ラインセンサ33bの受光面との共役関係が保たれる。尚、第2ラインセンサ33bの平行移動のみではペリクルP上における検査光L2の照射面全面に亘る共役関係を保つことができないことがある場合には、第2ラインセンサ33bを回転させてその受光面を傾斜させても良い。
ここで、ペリクル高さはレチクルR毎に異なる可能性がある。このため、前述した駆動装置39による第2照明系31b又はミラー38bのみのZ方向への移動量、及び、調整装置40による第2受光系32bの焦点位置の調整量又は移動装置41による第2ラインセンサ33bの移動量がレチクルR毎に異なる場合がある。かかる場合に、レチクルRの上面及びペリクルPの面上における異物を検査するためには、検査対象のレチクルRのペリクル高さを予め主制御系MCが知る必要がある。
前述した通り、各レチクルRにはバーコードが貼付されており、レチクルライブラリ21から異物検査装置DIに検査対象のレチクルRを搬送するときに、レチクル搬送系22に設けられた読み取り装置23でバーコードが読み取られる。読み取られたバーコードが主制御系MCに供給されると、主制御系MCはそのバーコードに対応付けられているレチクルRに関する情報(ペリクル高さを含む)を取得することができる。ペリクル高さが得られれば、第2照明系31b又はミラー38bのみのZ方向への移動量、及び、調整装置40による第2受光系32bの焦点位置の調整量又は移動装置41による第2ラインセンサ33bの移動量を求めることができる。
また、レチクルRに貼付されたバーコードを読み取り装置23で読み取ってペリクル高さを得る方法以外に、レチクルRのペリクル高さを自動的に検出することもできる。図8は、レチクルRのペリクル高さを自動的に検出する方法を説明するために図である。尚、図8は、図3に対応する正面図である。レチクルRのペリクル高さを自動的に検出するためには、第2照明系31bと図2に示したラインセンサ34とを用いる。尚、ラインセンサ34は、Z方向の位置を検出するように配置されている。
図8(a)に示す通り、ペリクルPのペリクル高さが低く、第2照明系31bからの検査光L2がペリクルの面に照射されない場合には、検査光L2がラインセンサ34に直接照射される。ここで、駆動装置39により第2照明系31bを+Z方向へ移動させると、第2照明系31bの移動に応じてラインセンサ34に対する検査光L2の照射位置が変化する。このため、図8(c)に示す通り、ラインセンサ34で検出される検査光L2の検出位置が変化する。尚、図8(c)においては、第2照明系31bの高さ位置(Z方向の位置)を横軸に取り、ラインセンサ34で検出される検出位置(検査光L2の照射位置)を縦軸に取っている。
第2照明系31bの+Z方向への移動を続けると、図8(c)に示す通り、第2照明系31bの高さ位置に応じてラインセンサ34の検出位置が連続的に上がる。しかしながら、検査光2がペリクルPの面に照射されると、ペリクルPの面で検査光L2が反射されることにより、検査光L2はラインセンサ34の下方に照射される。これにより、図8(c)に示す通り、ラインセンサ34の検出結果に飛びが生ずる。更に、第2照明系31bの+Z方向への移動を続けると、ペリクルPの面での反射により、第2照明系31bの移動に応じてラインセンサ34の検出結果が連続的に下がる。
以上から、第2照明系31bをZ方向へ移動させた場合に、検査光L2がペリクルPの面に照射されたときにラインセンサ34の検出位置が不連続になる(飛びが生ずる)。よって、搬送アームARがレチクルRを保持する高さ位置を一定にすれば、検査光L2のペリクルPの面に対する入射角は一定であるため、ラインセンサ34の検出位置が不連続になるときの第2照明系31bの高さ位置K(図8(c)参照)を求めれば、ペリクル高さを自動的に検出することができる。尚、以上の制御は、ラインセンサ34の検出結果を用いて主制御系MCが行っても良く、又はラインセンサ34の検出結果を用いて駆動装置39が行っても良い。また、上記の例では、第2照明系31bからの検査光L2を用いてペリクル高さを検出する場合を挙げて説明したが、ペリクル高さを検出するための専用の光源を設け、この光源を用いて上記の同様の検出を行っても良い。
上記構成において、レチクルRの上面及びペリクルPの面上における異物を検査する場合には、まず上述したレチクルRに貼付されたバーコードの読み取りが行われてペリクル高さが求められ、又は上述したペリクル高さの自動検出がなされる。次に、レチクルRのペリクル高さに応じた駆動装置39による第2照明系31bの高さ位置調整、及び、調整装置40による第2受光系32bの焦点位置調整又は移動装置41による第2ラインセンサ33bの移動調整が行われる。以上の前処理を終えると、検査対象のレチクルRが搬送アームAR上に載置された状態で異物検査装置DI内に搬送される。レチクルRが搬送アームARにより検査開始位置までに搬送されると、第1照明系31aから検査光L1が射出されるとともに第2照明系31bから検査光L2が照射される。
第1照明系31aからの検査光L1はレチクルRの上面上におけるX方向に延びた照射面に照射され、第2照明系31bからの検査光L2はペリクルPの面上におけるX方向に延びた照射面に照射される。ここで、レチクルRの上面上における照射面及びペリクルPの面上における照射面は、レチクルRのX方向の幅程度に設定されている。また、第1受光系32aに関して第1ラインセンサ33aの受光面はレチクルRの上面上における照射面と共役にされ、第2受光系32bに関して第2ラインセンサ33bの受光面はペリクルPの面上における照射面と共役にされている。
このため、レチクルRの上面上における照射面に存在する異物によって生じた散乱光が第1ラインセンサ33aで受光されると、第1ラインセンサ33aの受光位置(第1ラインセンサ33aの検出結果)によって異物のレチクルR上におけるX方向の位置が特定され、その信号強度から異物の大きさが特定される。同様に、ペリクルPの面上における照射面に存在する異物によって生じた散乱光が第2ラインセンサ33bで受光されると、第2ラインセンサ33bの受光位置(第2ラインセンサ33bの検出結果)によって異物のペリクルP上におけるX方向の位置が特定され、その信号強度から異物の大きさが特定される。
搬送アームARを+Y方向に一定速度で移動させると、レチクルRの上面及びペリクルPの面上が検査光L1,L2によってそれぞれ走査される。搬送アームARの位置と第1ラインセンサ33aの時間変化とを対応付けるとレチクルRの上面上の異物の分布を求めることができる。同様に、搬送アームARの位置と第2ラインセンサ33bの時間変化とを対応付けるとペリクルPの面上の異物の分布を求めることができる。このようにして、異物の検査が行われる。尚、異物の検査は搬送アームを+Y方向に移動させながら(往路で)行っても良く、−Y方向に移動させながら(復路で)行っても良い。或いは、往路と復路との両方で行い、各々の検査結果を総合して検査精度を高めるようにしても良い。
〈第2実施形態〉
図9は、本発明の第2実施形態による異物検査装置を示す正面図である。尚、図9においては、図3に示した構成に相当する構成には同一の符号を付してある。図9に示す異物検査装置が図3に示す異物検査装置と異なるのは、搬送アームARのZ方向の位置が可変であって、駆動装置39が省略されている点である。従って、本実施形態では、第2照明系31bのZ方向の位置が固定されており、ペリクル高さに応じた第2照明系31bの高さ位置調整は行われない。また、第2受光系32bの焦点位置調整又は第2ラインセンサ33bの移動調整も行われない。
図9は、本発明の第2実施形態による異物検査装置を示す正面図である。尚、図9においては、図3に示した構成に相当する構成には同一の符号を付してある。図9に示す異物検査装置が図3に示す異物検査装置と異なるのは、搬送アームARのZ方向の位置が可変であって、駆動装置39が省略されている点である。従って、本実施形態では、第2照明系31bのZ方向の位置が固定されており、ペリクル高さに応じた第2照明系31bの高さ位置調整は行われない。また、第2受光系32bの焦点位置調整又は第2ラインセンサ33bの移動調整も行われない。
上記構成において、レチクルRの上面及びペリクルPの面上における異物を検査する場合には、まず上述したレチクルRに貼付されたバーコードの読み取りが行われてペリクル高さが求められる。次に、検査対象のレチクルRが搬送アームAR上に載置された状態で異物検査装置DI内に搬送される。レチクルRが搬送アームARにより検査開始位置までに搬送されると、図9(a)に示す通り、第1照明系31aから検査光L1が射出されるとともに第2照明系31bから検査光L2が照射される。
第1照明系31aからの検査光L1はレチクルRの上面上におけるX方向に延びた照射面に照射されるが、第2照明系31bからの検査光L2はペリクルPのペリクル高さが基準ペリクル高さよりも低いためペリクルPの面上には照射されない。この状態で搬送アームARを+Y方向に一定速度で移動させることにより、レチクルRの上面の検査が行われる。
次に、図9(b)に示す通り、上記のバーコードの読み取りにより得られたペリクル高さに応じて、搬送アームARを−Z方向に移動させる。具体的には、基準ペリクル高さとバーコードの読み取りにより得られたペリクル高さとの差の分だけ搬送アームARを−Z方向に移動させる。これにより、第2照明系31bからの検査光L2はペリクルPの面上におけるX方向に延びた照射面に照射されるが、第1照明系31aからの検査光L1は搬送アームARを−Z方向に移動させたためレチクルRの上面上には照射されない。この状態で搬送アームARを−Y方向に一定速度で移動させることにより、ペリクルPの面の検査が行われる。
以上の通り、本実施形態では、搬送アームARをZ方向に移動可能とし、往路ではレチクルRの上面の検査を行い、復路ではペリクルPの面の検査を行っている。このため、大幅に装置構成を変更することなく、異なるペリクル高さのレチクルRの検査を行うことができる。尚、図9(a)においては理解を容易にするために、往路で検査を行う場合及び復路で検査を行う場合の何れの場合においても検査光L1,L2の双方が射出されている状態を図示しているが、往路では検査光L1のみを射出させ、復路では検査光L2のみを射出させるのが望ましい。
また、本実施形態と前述の第1実施形態とを組み合わせることも可能である。例えば、Z方向に移動可能な第2照明系31bにより図8を用いて説明した方法によりペリクル高さを自動的に求め、このペリクル高さに応じて搬送アームARをZ方向に移動させることも可能である。往路でペリクルPの面の検査を行い、復路でレチクルRの上面の検査を行っても良いことは言うまでもない。
〈第3実施形態〉
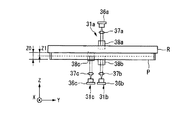
図10は、本発明の第3実施形態による異物検査装置を示す側面図である。尚、図10においては、図4に示した構成に相当する構成には同一の符号を付してあり、搬送アームAR、第1受光系32a及び第2受光系32b、並びに第1ラインセンサ33a及び第2ラインセンサ33bの図示は省略している。図10に示す異物検査装置が図4に示す異物検査装置と異なるのは、ペリクル高さに合わせて複数の照明系を備えた点である。尚、第1実施形態と同様に、図示していない第2受光系32bは焦点位置の調整が可能に構成されており、或いは図示していない第2ラインセンサ33bは移動調整が可能に構成されている。
図10は、本発明の第3実施形態による異物検査装置を示す側面図である。尚、図10においては、図4に示した構成に相当する構成には同一の符号を付してあり、搬送アームAR、第1受光系32a及び第2受光系32b、並びに第1ラインセンサ33a及び第2ラインセンサ33bの図示は省略している。図10に示す異物検査装置が図4に示す異物検査装置と異なるのは、ペリクル高さに合わせて複数の照明系を備えた点である。尚、第1実施形態と同様に、図示していない第2受光系32bは焦点位置の調整が可能に構成されており、或いは図示していない第2ラインセンサ33bは移動調整が可能に構成されている。
図10に示す通り、本実施形態の異物検査装置は、図4に示す第1実施形態の異物検査装置と同様に第1照明系31a及び第2照明系31bを備えているが、これらに加えて−X側から+X方向に向けてシートビーム状に整形された検査光をペリクルPの面上に照射する第3照明系31cを備えている。第2照明系31bは、ペリクル高さが基準ペリクル高さZ0であるペリクルPの面に検査光L2が照射されるようにZ方向の位置が調整されており、第3照明系31cは、ペリクル高さが基準ペリクル高さZ0よりも低いZ1であるペリクルPの面に検査光が照射されるようにZ方向の位置が調整されている。
具体的に、第3照明系31cは、光源36c、コリメートレンズ37c、及びミラー38cを含んで構成される。光源36cは、例えば半導体レーザダイオードであり、所定の角度で発散するレーザ光を+Z方向に射出する。コリメートレンズ37cは、光源36cから射出されるレーザ光を平行光に変換する。ミラー38cは、コリメートレンズ37cを介したレーザ光を+X方向に偏向して検査光とする。このミラー38cは、ペリクルPの面に対する検査光の入射角が80°程度又はそれ以上になるようコリメートレンズ37cを介したレーザ光を+X方向に偏向する。尚、第3照明系31cが射出する検査光のペリクルPの面に対する入射角は、第2照明系31bが射出する検査光L2のペリクルPの面に対する入射角と同じである。
上記構成において、レチクルRの上面及びペリクルPの面上における異物を検査する場合には、まず第1実施形態と同様に、レチクルRに貼付されたバーコードの読み取りが行われてペリクル高さが求められ、又は上述したペリクル高さの自動検出がなされる。次に、第1実施形態と同様に、レチクルRのペリクル高さに応じた調整装置40による第2受光系32bの焦点位置調整又は移動装置41による第2ラインセンサ33bの移動調整が行われる(図7参照)。以上の前処理を終えると、検査対象のレチクルRが搬送アームAR上に載置された状態で異物検査装置DI内に搬送される。
レチクルRが搬送アームARにより検査開始位置までに搬送されると、第1照明系31aから検査光L1が射出されるとともに、レチクルRのペリクル高さに応じて第2照明系31bから検査光L2が照射され、又は第3照明系31cから検査光が照射される。具体的には、搬送アームAR上に載置されたレチクルRのペリクル高さが基準ペリクル高さZ0である場合には第2照明系31bから検査光L2が照射され、ペリクル高さが基準ペリクル高さZ0とは異なるペリクル高さZ1である場合には第3照明系31cから検査光が照射される。
第1照明系31aからの検査光L1はレチクルRの上面上におけるX方向に延びた照射面に照射され、第2照明系31bからの検査光L2又は第3照明系31cからの検査光はペリクルPの面上におけるX方向に延びた照射面に照射される。この状態で搬送アームARを+Y方向に一定速度で移動させると、レチクルRの上面が検査光L1によって走査され、ペリクルPの面が検査光L2又は第3照明系31cからの検査光によって走査される。このようにしてレチクルRの上面とペリクルPの面の検査が行われる。尚、第1実施形態と同様に、検査は往路で行っても良く、復路で行っても良い。或いは、往路と復路との両方で行い、各々の検査結果を総合して検査精度を高めるようにしても良い。
〈第4実施形態〉
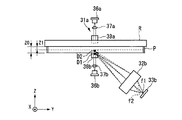
図11は本発明の第4実施形態による同異物検査装置を示す正面図であり、図12は同異物検査装置を示す側面図である。尚、図11,図12においては、図3,4に示した構成に相当する構成には同一の符号を付してあり、搬送アームARの図示は省略している。本実施形態の異物検査装置は、図3及び図4に示す第1実施形態の異物検査装置が備える第1照明系31a並びに不図示の第1受光系32a及び第1ラインセンサ33aと同様の構成を備えている。しかしながら、ペリクルPの面に対して検査光を照射する照明系及びペリクルPの面に付着した異物からの散乱光を受光する受光側の構成が異なる。
図11は本発明の第4実施形態による同異物検査装置を示す正面図であり、図12は同異物検査装置を示す側面図である。尚、図11,図12においては、図3,4に示した構成に相当する構成には同一の符号を付してあり、搬送アームARの図示は省略している。本実施形態の異物検査装置は、図3及び図4に示す第1実施形態の異物検査装置が備える第1照明系31a並びに不図示の第1受光系32a及び第1ラインセンサ33aと同様の構成を備えている。しかしながら、ペリクルPの面に対して検査光を照射する照明系及びペリクルPの面に付着した異物からの散乱光を受光する受光側の構成が異なる。
図11,図12に示す通り、本実施形態の異物検査装置は、ペリクルPの面に対して検査光を照射する照明系として第2照明系51を備えており、ペリクルPの面に付着した異物からの散乱光を受光する受光側の構成として第2受光系52及び第2ラインセンサ53を備えている。尚、図12に示す通り、第2照明系51は側面から見た場合に、その光軸BXがZX平面に対して角度θだけ傾むくように配置されている。
第2照明系51は、図11、図12に示す通り、光源56、コリメートレンズ57、照射部材としてのシリンドリカルレンズ58、及びミラー59を含んで構成され、−X側から+X方向に向けて、発散する検査光L4をペリクルPの面上に照射する。光源56は、例えば半導体レーザダイオードであり、所定の角度で発散するレーザ光を光軸BX方向に射出する。コリメートレンズ57は、光源56から射出されるレーザ光を平行光に変換する。シリンドリカルレンズ58は、光軸BXが含まれる面内でコリメートレンズ57を介したレーザ光を所定の角度で発散させる。ミラー59は、シリンドリカルレンズ58で発散されたレーザ光を+X方向に偏向して検査光L4とする。
ミラー59の偏向角は、ペリクルの面に対する光軸BXの角度(即ち、検査光L4の入射角)が第1〜第3実施形態で説明した検査光L1,L2の入射角よりも小さくなるように設定される。ここで、本実施形態では第2照明系51が備えるシリンドリカルレンズ58によってコリメートレンズ57を介したレーザ光を光軸BXが含まれる面内で発散させている。このため、検査光L4の入射角を小さくしても、図11に示す通り、ペリクルPのX方向については検査光L4がペリクルPを覆うよう照射される。尚、シリンドリカルレンズ28で発散させているのは光軸BX(ミラー59で折り曲げられている光軸BX)が含まれる面内のみであり、検査光L4がペリクルPの全面に照射される訳ではない点に注意されたい。
ここで、シリンドリカルレンズ58による発散角は、検査光L4がX方向についてペリクルPを覆うのに最低限必要な角度以上の角度に設定されている。これは、ペリクル高さが異なるレチクルRが配置された場合であっても、ペリクルPの面上におけるX方向に延びた照射面の全体に検査光L4を照射するためである。
このため、図11(a)に示す通り、ペリクル高さが基準ペリクル高さであるレチクルRの検査を行う場合には、ペリクルPに向けて照射される検査光L4のうち、ペリクルPの面上に照射されない検査光L5(ペリクルPの枠に照射されて反射される検査光L5)が存在する。また、図11(b)に示す通り、ペリクル高さが基準ペリクル高さよりも低いレチクルRの検査を行う場合には、ペリクルPに向けて照射される検査光L4のうち、ペリクルPの面上に照射されない検査光L6が存在する。
図11(a),(b)に示す通り、本実施形態では、ペリクルPに向けて照射される検査光L4のうち、検査に寄与しない検査光L5,L6が存在する。このため、これらの検査光L5,L6が検査に悪影響を与えないように、照明系及び受光側の配置を工夫し、或いはこれらの検査光L5,L6が受光側に迷光として入射するのを防止する対策を施すのが望ましい。
次に、図12を参照して受光側の構成について説明する。第2受光系52は、第2照明系51からの検査光L4がペリクルPの面上における異物D(異物D1又は異物D2)に照射されて生ずる散乱光を受光する。第2ラインセンサ53は、第2受光系52で受光された散乱光の光強度に応じた信号を出力する。第2ラインセンサ53から出力される信号は主制御系MCに供給される。
ここで、第2受光系52と第2ラインセンサ53とからなる受光側の構成は、側面から見た場合に、その光軸CXが第2照明系51の光軸BXと90°の角度をなすよう配置される。具体的には、前述した通り、第2照明系51は側面から見た場合に、その光軸BXがZX平面に対して角度θだけ傾むくように配置されているため、第2受光系52と第2ラインセンサ53とからなる受光側の構成は、側面から見た場合に、その光軸CXがZX平面に対して角度(90°−θ)だけ傾むくように配置されている。
第2受光系52と第2ラインセンサ53とからなる受光側の構成をかかる配置とするのは、ペリクル高さが異なる場合であってもペリクル高さの相違に拘わらず、第2受光系52に関して第2ラインセンサ53の受光面とペリクルPの面内における検査光L4の照射面とを共役にするためである。
いま、ペリクル高さが基準ペリクル高さZ0であるとする。かかるペリクル高さZ0のペリクル面上における微小な異物D1からの散乱光は第2受光系52を介して第2ラインセンサ53の受光面上における点f5に集光される。一方、ペリクル高さ基準ペリクル高さZ0よりも低いZ1であるペリクルPの面上における微小な異物D1からの散乱光は第2受光系52を介して第2ラインセンサ53の受光面上における点f6に集光される。
以上の通り、本実施形態では、側面から見た場合に、第2受光系52と第2ラインセンサ53とからなる受光側を、その光軸CXが第2照明系51の光軸BXと90°の角度をなすよう配置しているため、ペリクル高さが異なっていても第2受光系52に関して第2ラインセンサ53の受光面とペリクルPの面(検査光L4の照射面)とを共役にすることができる。これにより、ペリクル高さが異なるレチクルRの検査を行う場合の第2受光系の焦点位置調整又は第2ラインセンサの移動調整が不要となる。
上記構成において、レチクルRの上面及びペリクルPの面上における異物を検査する場合には、まず第1実施形態と同様に、レチクルRに貼付されたバーコードの読み取りが行われてペリクル高さが求められる。尚、本実施形態においては、第1照明系31a及び第2照明系51の位置は固定であるが、第1照明系31a及び第2照明系51とは別途に、図5に示す方法によりペリクル高さの自動検出を行うための照明系を設け、ペリクル高さを自動検出しても良い。
以上の前処理を終えると、検査対象のレチクルRが搬送アームAR上に載置された状態で異物検査装置DI内に搬送される。レチクルRが搬送アームARにより検査開始位置までに搬送されると、第1照明系31aから検査光L1が射出されるとともに第2照明系51から検査光L4が照射される。第1照明系31aからの検査光L1はレチクルRの上面上におけるX方向に延びた照射面に照射され、第2照明系51からの検査光L4はペリクルPの面上におけるX方向に延びた照射面に照射される。
この状態で搬送アームARを+Y方向に一定速度で移動させると、レチクルRの上面が検査光L1によって走査され、ペリクルPの面が検査光L4によって走査される。このようにしてレチクルRの上面とペリクルPの面の検査が行われる。尚、第1実施形態と同様に、検査は往路で行っても良く、復路で行っても良い。或いは、往路と復路との両方で行い、各々の検査結果を総合して検査精度を高めるようにしても良い。
以上の通り、本実施形態ではシリンドリカルレンズ58による発散角を、検査光L4がX方向についてペリクルPを覆うのに最低限必要な角度以上の角度に設定しているため、ペリクル高さが異なっていてもペリクルPの面上に検査光L4を照射することができる。よって、本実施形態では、第2照明系51の焦点位置調整若しくは第2ラインセンサの移動調整又は搬送アームARのZ方向への移動をすることなくペリクル高さが異なるレチクルRを検査することができる。また、本実施形態では受光側の構成を駆動する必要がなく、第2受光系52及び第2ラインセンサ53の位置ぶれを防止することができる。これにより、フォーカスが合った状態の安定した信号が得られ、より精確な検査を行うことができる。
尚、上述の通り、本実施形態では、側面から見た場合に、第2受光系52と第2ラインセンサ53とからなる受光側の光軸CXと第2照明系51の光軸BXとが90°の角度をなすように受光側全体を配置するする場合を例に挙げて説明した。しかしながら、光軸BBXと光軸CXが上記の関係となるように、第2照明系51に設けられるシリンドリカルレンズ58の向きのみを変え、又はミラー59の姿勢のみを変えても良い。
〔露光装置の動作〕
次に、本発明の一実施形態による露光装置EXの動作について簡単に説明する。露光処理が開始されると、レチクルライブラリ21から所定のレチクルRが取り出されレチクル搬送装置22によって搬送される。このとき、レチクルRに貼付されたバーコードが読み取り装置23で読み取られ、その情報が主制御系MCに供給される。主制御系MCは、この情報に基づいてレチクル搬送装置22によって搬送されているレチクルRのレチクル高さを求め、異物検査装置DIに対して制御信号を出力する。
次に、本発明の一実施形態による露光装置EXの動作について簡単に説明する。露光処理が開始されると、レチクルライブラリ21から所定のレチクルRが取り出されレチクル搬送装置22によって搬送される。このとき、レチクルRに貼付されたバーコードが読み取り装置23で読み取られ、その情報が主制御系MCに供給される。主制御系MCは、この情報に基づいてレチクル搬送装置22によって搬送されているレチクルRのレチクル高さを求め、異物検査装置DIに対して制御信号を出力する。
具体的には、露光装置EXに第1実施形態の異物検査装置DIが設けられている場合には、主制御系MCは第2照明系31bのZ方向の位置調整のための制御信号を駆動装置39に出力するための制御信号を出力する。また、これとともに、第2照明系31bの焦点位置調整のための制御信号を調整装置40に出力し、又は第2ラインセンサの移動調整のための制御信号を移動装置41に出力する。露光装置EXに第2実施形態の異物検査装置DIが設けられている場合には、主制御系MCは、搬送アームARのZ方向への移動量を示す制御信号を異物検査装置DIに出力する。
露光装置EXに第3実施形態の異物検査装置DIが設けられている場合には、主制御系MCは第2照明系31b及び第3照明系31cの何れから検査光を射出するかを示す制御信号を異物検査装置DIに出力する。また、これとともに、第2照明系31bの焦点位置調整のための制御信号を調整装置40に出力し、又は第2ラインセンサの移動調整のための制御信号を移動装置41に出力する。尚、露光装置EXに第4実施形態の異物検査装置DIが設けられている場合には、主制御系MCは異物検査装置DIに対する制御信号の出力が不要となる。
レチクルRが搬送装置22によって異物検査装置DIに搬送されると、異物検査装置DIにより前述したレチクルRの検査が行われる。検査を終えたレチクルRは搬送装置22によって搬送されてレチクルステージRST上に保持される。レチクルRが保持されると、不図示のレチクルアライメントセンサによりレチクルRとウェハステージWSTとの相対位置関係が調整される。
以上の処理を終えると、ウェハステージWSTが所定のローディングポジションに移動し、露光処理を行うべきウェハWがロードされてウェハステージWST上に保持される。ウェハWのロードが完了すると、ウェハステージWSTはアライメントセンサ20の下方(−Z方向)に移動して、EGA計測が行われる。このEGA計測では、ウェハWに形成された代表的な数個のアライメントマークの計測が行われ、統計演算によりウェハW上に設定された全てのショット領域の配列が求められる。
EGA計測が終了すると、ウェハW上に設定された各ショット領域に対する露光が行われる。この処理では、主制御系MCがウェハ駆動装置18を駆動し、最初に露光すべきショット領域が移動開始位置に配置されるようウェハステージWSTを移動させる。これと同時にレチクルステージRSTも移動開始に配置される。以上の配置が完了すると、主制御系MCはレチクルステージRST及びウェハステージWSTの移動を開始させ、レチクルステージRST及びウェハステージWSTが所定の速度に達してから整定時間(レチクルステージRST及びウェハステージWSTの加速により生じた振動を収めるために設けられる時間)経過後に露光光ELがレチクルRに照射されてショット領域の露光が開始される。1つのショット領域に対する露光処理が終了すると、主制御系MCはウェハステージWSTをX方向にステップ移動させ、次に露光すべきショット領域を移動開始位置に配置する。以下、同様にしてウェハW上のショット領域の全てに対する露光が行われる。
以上、本発明の一実施形態による露光装置及び異物検査装置について説明したが、本発明は上記実施形態に制限されず、本発明の範囲内で自由に変更が可能である。例えば、上記実施形態ではステップ・アンド・スキャン方式の露光装置を例に挙げて説明したが、ステップ・アンド・リピート方式の露光装置にも適用可能である。また、半導体素子の製造に用いられる露光装置だけではなく、液晶表示素子(LCD)等を含むディスプレイの製造に用いられてデバイスパターンをガラスプレート上へ転写する露光装置、薄膜磁気ヘッドの製造に用いられてデバイスパターンをセラミックウェハ上へ転写する露光装置、及びCCD等の撮像素子の製造に用いられる露光装置等にも本発明を適用することができる。
23 読み取り装置
31a 第1照明系
31b 第2照明系
31c 第3照明系
32a 第1受光系
32b 第2受光系
33a 第1ラインセンサ
33b 第2ラインセンサ
34 ラインセンサ
39 駆動装置
40 調整装置
41 移動装置
51 第2照明系
52 第2受光系
53 第2ラインセンサ
58 シリンドリカルレンズ
AR 搬送アーム
D,D1,D2 異物
DI 異物検査装置
L1,L2,L3,L4 検査光
R レチクル
31a 第1照明系
31b 第2照明系
31c 第3照明系
32a 第1受光系
32b 第2受光系
33a 第1ラインセンサ
33b 第2ラインセンサ
34 ラインセンサ
39 駆動装置
40 調整装置
41 移動装置
51 第2照明系
52 第2受光系
53 第2ラインセンサ
58 シリンドリカルレンズ
AR 搬送アーム
D,D1,D2 異物
DI 異物検査装置
L1,L2,L3,L4 検査光
R レチクル
Claims (15)
- 検査光を被検査面に照射する照明系と、前記被検査面に付着した異物からの散乱光を受光する受光系と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子とを備える異物検査装置において、
前記照明系の少なくとも一部を移動させて前記被検査面に対する前記検査光の照射位置を可変する駆動装置を備えることを特徴とする異物検査装置。 - 前記照明系は、前記検査光を射出する光源と、
前記光源からの前記検査光を、前記被検査面に向けて偏向する偏向部材とを備えることを特徴とする請求項1記載の異物検査装置。 - 前記駆動装置は、前記偏向部材を移動させて前記被検査面に対する前記検査光の照射位置を可変することを特徴とする請求項2記載の異物検査装置。
- 前記駆動装置は、前記光源及び前記偏向部材を一体的に移動させて前記被検査面に対する前記検査光の照射位置を可変することを特徴とする請求項2記載の異物検査装置。
- 前記被検査面の面位置を示す情報を読み取る読取装置を備え、
前記駆動装置は、前記読取装置で読み取られた情報に基づいて前記照明系の少なくとも一部を移動させることを特徴とする請求項1から請求項4の何れか一項に記載の異物検査装置。 - 前記駆動装置は、前記被検査面に対する前記検査光の照射位置を可変させつつ光電検出素子から出力される前記信号をモニタして前記被検査面の面位置を求め、前記照明系の少なくとも一部の移動量を制御することを特徴とする請求項1から請求項4の何れか一項に記載の異物検査装置。
- 前記被検査面に対する前記検査光の照射位置に応じて前記受光系の焦点位置を可変させる焦点可変装置を備えることを特徴とする請求項1から請求項6の何れか一項に記載の異物検査装置。
- 前記被検査面に対する前記検査光の照射位置に応じて前記光電検出素子を移動させ、前記被検査面と前記光電検出素子の受光面とを共役関係にする素子駆動装置を備えることを特徴とする請求項1から請求項6の何れか一項に記載の異物検査装置。
- 検査光を被検査面に照射する照明系と、前記被検査面に付着した異物からの散乱光を受光する受光系と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子とを備える異物検査装置において、
異なる高さ位置に設定される前記被検査面の各々に対応して設けられ、各々の被検査面に対して前記検査光を同一の入射角で照射する複数の照明系を備えることを特徴とする異物検査装置。 - 検査光を被検査面に照射する照明系と、前記被検査面に付着した異物からの散乱光を受光する受光系と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子と、前記被検査面とされる面を有する物体と前記検査光との所定の関係を保ちつつ前記物体を搬送する搬送装置とを備える異物検査装置において、
前記搬送装置は、前記被検査面に交差する方向の位置が可変であることを特徴とする異物検査装置。 - 前記物体は、前記被検査面として互いに平行な第1面及び第2面を有しており、
前記照明系は、前記第1面側に前記検査光を照射する第1照明系と、前記第2面側に前記検査光を照射する第2照明系とを備え、
前記搬送装置は、前記第1面の検査を行う場合には前記被検査面に交差する方向の位置を可変して前記第1照明系からの検査光の照射位置に前記第1面を合わせ、前記第2面の検査を行う場合には前記被検査面に交差する方向の位置を可変して前記第2照明系からの検査光の照射位置に前記第2面を合わせることを特徴とする請求項10記載の異物検査装置。 - 前記搬送装置は、前記第1面の検査を行う場合には前記物体の搬送路に沿う第1方向に前記物体を搬送し、前記第2面の検査を行う場合には前記第1方向とは逆の第2方向に前記物体を搬送することを特徴とする請求項11記載の異物検査装置。
- 検査光を被検査面に照射する照明系と、前記被検査面に付着した異物からの散乱光を受光する受光系と、当該受光系で受光された散乱光の光強度に応じた信号を出力する光電検出素子とを備える異物検査装置において、
前記照明系は、前記被検査面の面位置に拘わらず前記被検査面内の所定方向に関して前記被検査面の全体に前記検査光を照射する照射部材を備えることを特徴とする異物検査装置。 - 前記照明系及び前記受光系は、各々の光軸が互いに直交し、且つ前記所定方向と直交するよう配置されていることを特徴とする請求項13記載の異物検査装置。
- 請求項1から請求項14の何れか一項に記載の異物検査装置を備えることを特徴とする露光装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005374138A JP2007178152A (ja) | 2005-12-27 | 2005-12-27 | 異物検査装置及び露光装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005374138A JP2007178152A (ja) | 2005-12-27 | 2005-12-27 | 異物検査装置及び露光装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007178152A true JP2007178152A (ja) | 2007-07-12 |
Family
ID=38303507
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005374138A Withdrawn JP2007178152A (ja) | 2005-12-27 | 2005-12-27 | 異物検査装置及び露光装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007178152A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010197367A (ja) * | 2009-02-20 | 2010-09-09 | Samsung Corning Precision Glass Co Ltd | ガラス表面の異物検査装置及びその方法{detectionapparatusforparticleontheglassanddetectionmethodusingthesame} |
| JP5686394B1 (ja) * | 2014-04-11 | 2015-03-18 | レーザーテック株式会社 | ペリクル検査装置 |
| JP2025005327A (ja) * | 2023-06-27 | 2025-01-16 | キヤノン株式会社 | 異物検査システム、露光装置、及び物品の製造方法 |
-
2005
- 2005-12-27 JP JP2005374138A patent/JP2007178152A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010197367A (ja) * | 2009-02-20 | 2010-09-09 | Samsung Corning Precision Glass Co Ltd | ガラス表面の異物検査装置及びその方法{detectionapparatusforparticleontheglassanddetectionmethodusingthesame} |
| JP5686394B1 (ja) * | 2014-04-11 | 2015-03-18 | レーザーテック株式会社 | ペリクル検査装置 |
| JP2025005327A (ja) * | 2023-06-27 | 2025-01-16 | キヤノン株式会社 | 異物検査システム、露光装置、及び物品の製造方法 |
| JP7746335B2 (ja) | 2023-06-27 | 2025-09-30 | キヤノン株式会社 | 異物検査システム、露光装置、及び物品の製造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11774850B2 (en) | Method for disposing substrate and method for manufacturing article | |
| JP5464155B2 (ja) | 露光装置、及び露光方法 | |
| TWI413870B (zh) | Detection device, moving body device, pattern forming device and pattern forming method, exposure device and exposure method, and device manufacturing method | |
| US8945954B2 (en) | Inspection method, inspection apparatus, exposure control method, exposure system, and semiconductor device | |
| US7688436B2 (en) | Measuring and/or inspecting method, measuring and/or inspecting apparatus, exposure method, device manufacturing method, and device manufacturing apparatus | |
| JP3634068B2 (ja) | 露光方法及び装置 | |
| US20130230798A1 (en) | Detection apparatus, exposure apparatus, and method of manufacturing device | |
| US8305555B2 (en) | Exposure apparatus, exposure method, and device manufacturing method | |
| KR20080065940A (ko) | 위치검출장치 및 노광장치 | |
| US20030193655A1 (en) | Exposure apparatus and method | |
| TW519687B (en) | Alignment apparatus, alignment method, exposure apparatus and exposure method | |
| KR20020077515A (ko) | 위치계측장치 및 노광장치 | |
| JP2009105397A (ja) | リソグラフィ装置および方法 | |
| TWI358529B (en) | Shape measuring apparatus, shape measuring method, | |
| US7106419B2 (en) | Exposure method and apparatus | |
| JP2002231616A (ja) | 位置計測装置及び方法、露光装置及び方法、並びにデバイス製造方法 | |
| JP2004134474A (ja) | 位置検出装置の検査方法、位置検出装置、露光装置、および露光方法 | |
| JP2007178152A (ja) | 異物検査装置及び露光装置 | |
| KR20200088529A (ko) | 초극자외선 리소그라피용 펠리클 검사 시스템 | |
| TW505975B (en) | Aligner | |
| JP2017215617A (ja) | 基板保持装置 | |
| JP2007256577A (ja) | 異物検査装置及び露光装置並びに光露光用マスク | |
| JPH10172900A (ja) | 露光装置 | |
| JP2009170663A (ja) | 投影光学ユニット、露光装置、露光方法、およびデバイス製造方法 | |
| JPH11233424A (ja) | 投影光学装置、収差測定方法、及び投影方法、並びにデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20090303 |