以下、本発明に係る破砕装置の実施の形態を、図1ないし図11を参照しつつ詳細に説明する。まず、図1ないし図9は本発明の第1の実施の形態を示している。
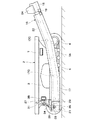
図中、1は自走式の破砕装置で、この破砕装置1は、例えば建築廃材、産業廃棄物等の破砕対象物を細かく破砕し、再利用可能な小さな被破砕物を生成するものである。そして、破砕装置1は、後述の走行体2、本体フレーム7、ホッパ12、クラッシャ14、ベルトコンベヤ16、コンベヤ昇降機構27等により構成されている。
2は自走可能なクローラ式の走行体で、該走行体2は、左,右のサイドフレーム3A(左側のみ図示)を有するトラックフレーム3と、該各サイドフレーム3Aの前,後方向の一端側に設けられた駆動輪4と、他端側に設けられた遊動輪5と、これら駆動輪4と遊動輪5とに巻回して設けられた履帯6と、後述の本体フレーム7とにより大略構成されている。また、トラックフレーム3には、遊動輪5よりも上側に位置して左,右方向に延びる角筒状の横梁3Bが設けられ、該横梁3Bには、後述するコンベヤ昇降機構27のアーム29が固定される構成となっている(図4、図5参照)。
7はトラックフレーム3上に固定して設けられた本体フレームで、該本体フレーム7は、トラックフレーム3上を前,後方向に延びる長方形の枠状に形成され、強固な支持構造体を構成している。ここで、本体フレーム7上には、後述の建屋支持フレーム8、ホッパ支持フレーム11、クラッシャ14等が設けられている。
8は本体フレーム7の前,後方向の一側に設けられた建屋支持フレームで、該建屋支持フレーム8上には建屋カバー9が設けられ、該建屋カバー9内には、エンジン、熱交換装置等の機器類(図示せず)が収容されている。また、建屋支持フレーム8上には、建屋カバー9の近傍に位置してオペレータが乗込む操縦台10が設けられ、該操縦台10には操作レバー装置10A等の操作機器が設けられている。そして、操縦台10に乗込んだオペレータが操作レバー装置10A等を操作することにより、破砕装置1(走行体2)の走行動作等を制御することができる構成となっている。
11は本体フレーム7の前,後方向の他側に設けられたホッパ支持フレームで、該ホッパ支持フレーム11は、例えば複数本の梁材を用いて形成された強固な骨組み構造をなし、後述のホッパ12、フィーダ13等を支持するものである。
12はホッパ支持フレーム11に支持されたホッパで、該ホッパ12は、全体として逆角錐状をなす箱体として形成され、その内部に建築廃材、産業廃棄物等の破砕対象物が投入されるものである。そして、ホッパ12の下端側は開口端となり、該開口端の下方には後述のフィーダ13が配設されている。
13はホッパ12の下側に位置してホッパ支持フレーム11に支持されたフィーダで、該フィーダ13は、ホッパ12の開口端から落下してきた破砕対象物を受取り、この破砕対象物を後述のクラッシャ14に向けて供給するものである。
14は本体フレーム7の中央部に設けられたクラッシャで、該クラッシャ14は、多数の破砕歯を有する固定歯14Aと、同じく多数の破砕歯を有し固定歯14Aに対向して揺動可能に設けられた可動歯14Bとを備えている。ここで、可動歯14Bの上端側は、クラッシャ用モータ(図示せず)によって駆動されるフライホイール15に連結され、このフライホイール15が回転することにより、固定歯14Aに対し接近、離間を繰返すように揺動する構成となっている。
そして、クラッシャ14は、ホッパ12内に投入された破砕対象物がフィーダ13によって固定歯14Aと可動歯14Bとの間に供給された後、可動歯14Bを揺動させることにより、破砕対象物を固定歯14Aと可動歯14Bとの間で細かく破砕し、細粒化した被破砕物を下方に落下させるものである。
16は被破砕物排出用のベルトコンベヤで、該ベルトコンベヤ16は、クラッシャ14の下側から走行体2の外部に向けて斜め上向きに傾斜しつつ前,後方向に延びている。そして、ベルトコンベヤ16は、クラッシャ14によって破砕された被破砕物を図1中の矢示A方向に搬送し、走行体2の外部に排出するものである。ここで、ベルトコンベヤ16は、後述の上流側コンベヤフレーム17、下流側コンベヤフレーム18、連結軸19、駆動プーリ20、従動プーリ21、ベルト22等により構成されている。
17はベルトコンベヤ16のベースとなる上流側コンベヤフレームで、該上流側コンベヤフレーム17は、ベルトコンベヤ16の搬送方向(図1中の矢示A方向)の上流側に配置されるものである。ここで、上流側コンベヤフレーム17は、図2等に示すように、左,右方向で対面しつつ前,後方向に延びる左,右の側面板17Aと、これら左,右の側面板17Aの基端部間を接続する接続端板17Bと、左,右の側面板17A間に回転可能に設けられた複数の案内ローラ17Cとにより大略構成されている。
そして、上流側コンベヤフレーム17の基端側は、後述のコンベヤ昇降機構27に支持された状態でクラッシャ14の下側に配置され、上流側コンベヤフレーム17の先端側は、本体フレーム7の下側から斜め上向きに傾斜しつつ走行体2の外部へと延び、後述する下流側コンベヤフレーム18の基端側に回動可能に連結される構成となっている。
18は上流側コンベヤフレーム17と共にベルトコンベヤ16のベースとなる下流側コンベヤフレームで、該下流側コンベヤフレーム18は、ベルトコンベヤ16の搬送方向の下流側に配置されるものである。ここで、下流側コンベヤフレーム18は、図1に示すように、左,右の側面板18Aと、これら左,右の側面板18Aの先端部間を接続する接続端板18Bと、左,右の側面板18A間に回転可能に設けられた複数の案内ローラ(図示せず)とにより大略構成されている。そして、下流側コンベヤフレーム18は、本体フレーム7に設けられた建屋支持フレーム8に、後述のコンベヤ取付アーム24,25を用いて固定されるものである。
19は上流側コンベヤフレーム17と下流側コンベヤフレーム18との間を連結する連結軸で、上流側コンベヤフレーム17の先端側は、連結軸19を介して下流側コンベヤフレーム18の基端側に回動可能に連結されている。この場合、下流側コンベヤフレーム18は、後述のコンベヤ取付アーム24,25によって建屋支持フレーム8に固定されているため、クラッシャ14の下側に配置された上流側コンベヤフレーム17の基端側は、連結軸19を支点として上,下方向(図1中の矢示B方向)に昇降(回動)することができる構成となっている。
20は下流側コンベヤフレーム18の先端側に設けられた駆動プーリで、該駆動プーリ20はコンベヤモータ(図示せず)によって回転駆動されるものである。21は上流側コンベヤフレーム17の基端側に回転可能に設けられた従動プーリで、該従動プーリ21と駆動プーリ20とに後述のベルト22が巻回される構成となっている。
22は駆動プーリ20と従動プーリ21とに巻回して設けられた無端状のベルトで、該ベルト22は、上流側コンベヤフレーム17及び下流側コンベヤフレーム18に沿って前,後方向に延びる無限軌道を形成している。そして、ベルト22は、クラッシャ14によって破砕された被破砕物を受取り、この被破砕物を図1中の矢示A方向に搬送することにより走行体2の外部に連続的に排出するものである。また、上流側コンベヤフレーム17と従動プーリ21との間には、ベルト22の張り(張力)を調整するための張力調整機構23が設けられている。
24,25は下流側コンベヤフレーム18と建屋支持フレーム8との間に設けられたコンベヤ取付アームで、下流側コンベヤフレーム18は、これらコンベヤ取付アーム24,25を用いて建屋支持フレーム8に固定される構成となっている。
26はコンベヤ取付アーム25に取付けられてベルトコンベヤ16の上方に配置された磁選機で、該磁選機26は、ベルトコンベヤ16によって搬送される被破砕物に含まれる鉄筋等の磁性体を吸着して除去することにより、被破砕物中に含まれる磁性体と非磁性体とを選別するものである。
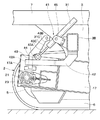
27,27はベルトコンベヤ16を構成する上流側コンベヤフレーム17の基端側と走行体2との間に設けられた左,右のコンベヤ昇降機構で、これら左,右のコンベヤ昇降機構27は、図3ないし図5等に示すように、後述のブラケット28、アーム29、昇降シリンダ31、支持ローラ33、段部34、ストッパ35等により構成されている。そして、コンベヤ昇降機構27は、ベルトコンベヤ16の基端側(上流側コンベヤフレーム17の基端側)を、連結軸19を中心として上,下方向(図1中の矢示B方向)に回動させ、ベルトコンベヤ16を図4及び図5に示す走行位置と、図6及び図7に示す作業位置とに昇降させるものである。
28,28は後述の支持ローラ33が引掛った状態で上流側コンベヤフレーム17を支持する左,右のブラケットで、該各ブラケット28は、上流側コンベヤフレーム17の基端側に位置して左,右の両側に設けられている。ここで、ブラケット28は、図2等に示すように、前,後方向に延びる長方形の枠体として形成され、上流側コンベヤフレーム17の側面板17Aに溶接等の手段を用いて固着されている。そして、ブラケット28は上,下方向に開口する開口部28Aを有し、この開口部28A内には、後述するアーム29、昇降シリンダ31のロッド31C等が挿通される構成となっている。また、ブラケット28の下端縁28Bには、後述する支持ローラ33が下側から当接する構成となっている。
29,29はベルトコンベヤ16を走行位置と作業位置とに保持する左,右のアームで、これら各アーム29は、上流側コンベヤフレーム17の各ブラケット28に対応するように走行体2に設けられている。ここで、アーム29は、図3及び図5に示すように、上,下方向に延びる左,右一対の平板により形成され、アーム29の基端側(上端側)はトラックフレーム3の横梁3Bにボルト等を用いて固定され、アーム29の先端側(下端側)は自由端となって下側に延び、ブラケット28の開口部28Aに挿通されている。
ここで、アーム29は、横梁3Bから斜め下向きに傾斜する傾斜部29Aと、該傾斜部29Aの下側から鉛直下向きに垂下する垂下部29Bとを有し、垂下部29Bの下端側には、後述のストッパ35が取付けられるストッパ取付孔29Cが穿設されている。また、アーム29の傾斜部29Aには、後述の昇降シリンダ31が設けられ、傾斜部29Aと垂下部29Bとの間には、後述の段部34が設けられる構成となっている。
30,30は各アーム29の上部側にそれぞれ固着された昇降シリンダ取付部としてのシリンダ取付板で、該各シリンダ取付板30はアーム29の一部を構成している。そして、シリンダ取付板30は、アーム29の段部34よりも上側に配置され、後述の昇降シリンダ31が取付けられるものである。なお、シリンダ取付板30は、組付性を考慮してアーム29とは別部材として構成したが、シリンダ取付板30とアーム29とを一体に形成してもよい。
31,31はベルトコンベヤ16を走行位置と作業位置との間で昇降させる左,右の昇降シリンダで、これらの昇降シリンダ31は、各アーム29のシリンダ取付板30にそれぞれ回動可能に取付けられている。ここで、これらの昇降シリンダ31は、図5等に示すように、チューブ31Aと、該チューブ31A内に摺動可能に挿嵌されたピストン31Bと、基端側が該ピストン31Bに固着され先端側がチューブ31Aから突出したロッド31Cとにより大略構成されている。
ここで、昇降シリンダ31のチューブ31Aは、アーム29の傾斜部29Aに固定されたシリンダ取付板30にピン32を介して上,下方向に回動可能に取付けられ、鉛直方向に対して斜めに傾斜して配置されている。そして、ロッド31Cはチューブ31Aから下向きに突出し、上流側コンベヤフレーム17に固定されたブラケット28の開口部28Aに挿通されている。また、開口部28Aを通じてブラケット28の下側に突出したロッド31Cの下端側には、後述の支持ローラ33が回転可能に設けられる構成となっている。
33は昇降シリンダ31の伸縮方向の下端側、即ちロッド31Cの下端側にそれぞれ設けられたコンベヤ支持部材としての支持ローラで、該支持ローラ33は、左,右方向に延びる軸を中心として回転可能に設けられている。ここで、支持ローラ33は、上流側コンベヤフレーム17に設けたブラケット28の下端縁28Bに当接することにより、該ブラケット28を下側から支持するものである。
そして、昇降シリンダ31は、チューブ31Aに対してロッド31Cを伸縮させることにより、上流側コンベヤフレーム17の基端側を連結軸19を中心として上,下方向に回動させ、ベルトコンベヤ16を、図4及び図5に示す走行位置と図6及び図7に示す作業位置とに昇降させる構成となっている。
34はベルトコンベヤ16を走行位置に保持する走行位置保持段部としての段部で、該段部34は、アーム29のシリンダ取付板30よりも下側に位置してアーム29にそれぞれ設けられている。ここで、段部34は、アーム29の傾斜部29Aと垂下部29Bとの間に配置され、傾斜部29Aの下端部から前方に向けて水平に延びている。そして、段部34は、図5に示すように、昇降シリンダ31のロッド31Cが縮小した状態で、該ロッド31Cに設けた支持ローラ33が当接することにより、支持ローラ33、ブラケット28を介して上流側コンベヤフレーム17(ベルトコンベヤ16)を走行位置に保持するものである。
一方、上流側コンベヤフレーム17を図5に示す走行位置に保持した状態で、昇降シリンダ31のロッド31Cを伸長させると、昇降シリンダ31のチューブ31Aは、ピン32を中心として上,下方向に回動し、昇降シリンダ31のロッド31Cに設けた支持ローラ33は、段部34上を転動することによりやがて当該段部34から離脱する。そして、段部34から離脱した支持ローラ33が、ブラケット28を下側から支持しつつアーム29の垂下部29Bに沿って下方へと移動することにより、上流側コンベヤフレーム17は、図4及び図5に示す走行位置から図6及び図7に示す作業位置へと下降する構成となっている。
35はベルトコンベヤ16を作業位置に保持する作業位置保持部材としてのストッパで、該ストッパ35は、段部34よりも下側に位置してアーム29の垂下部29Bにそれぞれ設けられている。ここで、ストッパ35は、例えば円柱状をなす軸体として形成され、アーム29に穿設されたストッパ取付孔29Cに着脱可能に取付けられることにより、垂下部29Bを左,右方向に貫通するものである。
従って、ストッパ35をアーム29に取付けた状態では、昇降シリンダ31のロッド31Cを伸長させて上流側コンベヤフレーム17を下方に移動させていくと、やがてブラケット28の下端縁28Bがストッパ35に当接することにより、上流側コンベヤフレーム17をストッパ35によって図6及び図7に示す作業位置に保持することができる構成となっている。
一方、ストッパ35をアーム29から取外した状態では、昇降シリンダ31のロッド31Cを伸長させて上流側コンベヤフレーム17を下方に移動させたとしても、ブラケット28の下端縁28Bがストッパ35に当接することがない。従って、上流側コンベヤフレーム17は作業位置に留まることがなく、該上流側コンベヤフレーム17を昇降シリンダ31のストロークに応じて作業位置よりも下側へと移動させ、例えば図8及び図9に示すように、上流側コンベヤフレーム17の基端側を地面に接地させることにより、ベルトコンベヤ16を作業位置よりも下側のメンテナンス位置に保持することができる構成となっている。
本実施の形態による破砕装置1は上述の如き構成を有するもので、この破砕装置1によって建築廃材等の破砕対象物を破砕するときには、まず、走行体2によって破砕装置1を作業現場へと自走させる。
ここで、破砕装置1を作業現場まで走行させるときには、ベルトコンベヤ16の基端側が地面上に存在する岩石等の障害物と干渉するのを防止するため、破砕装置1を走行させるのに先立って、上流側コンベヤフレーム17を図4及び図5に示す走行位置に保持する必要がある。
この場合には、図5に示すように、昇降シリンダ31のロッド31Cに設けた支持ローラ33を、上流側コンベヤフレーム17に設けたブラケット28の下端縁28Bに当接させた状態で、昇降シリンダ31のロッド31Cを縮小させる。これにより、支持ローラ33がアーム29の段部34に当接するので、上流側コンベヤフレーム17を、位置決めピン等を用いることなく、アーム29の段部34によって地面から大きく離間した走行位置に保持することができる。
このようにして、上流側コンベヤフレーム17を走行位置に保持した状態で、図1に示す破砕装置1の操縦台10に作業者が乗込み、操作レバー装置10Aを操作することにより、破砕装置1をベルトコンベヤ16と一緒に所望の作業現場まで走行させることができる。
次に、破砕装置1を作業現場まで走行させた後、クラッシャ14、ベルトコンベヤ16等を用いた破砕作業を行うときには、クラッシャ14とベルトコンベヤ16との間に被破砕物が引掛かるのを防止するため、上流側コンベヤフレーム17を、図4及び図5に示す走行位置から図6及び図7に示す作業位置に移動させる必要がある。
この場合には、上流側コンベヤフレーム17が図5に示す走行位置を保持した状態から、昇降シリンダ31のロッド31Cを伸長させる。これにより、昇降シリンダ31のチューブ31Aは、ピン32を中心として上,下方向に回動し、昇降シリンダ31のロッド31Cに設けた支持ローラ33は、段部34上を転動することによりやがて当該段部34から離脱する。
そして、段部34から離脱した支持ローラ33が、ブラケット28を下側から支持しつつアーム29の垂下部29Bに沿って下方へと移動することにより、上流側コンベヤフレーム17は、連結軸19を中心として下向きに回動し、図6及び図7に示す作業位置に向けて下降する。そして、図7に示すように、ブラケット28の下端縁28Bが、アーム29の垂下部29Bに設けたストッパ35に当接することにより、上流側コンベヤフレーム17をストッパ35によって作業位置に保持することができる。
この場合、上流側コンベヤフレーム17は、ブラケット28の下端縁28Bがストッパ35に当接することにより作業位置に保持されるので、例えば誤操作等によって昇降シリンダ31のロッド31Cを必要以上に伸長させてしまった場合でも、該ロッド31Cに設けた支持ローラ33がブラケット28から下方に離間するだけで、上流側コンベヤフレーム17を図7に示す作業位置に保持しておくことができる。
このようにして、上流側コンベヤフレーム17を作業位置に保持した後には、建築廃材、産業廃棄物等の破砕対象物を、油圧ショベル(図示せず)等を用いて破砕装置1のホッパ12内に投入する。そして、ホッパ12内に投入された粗大な破砕対象物を、フィーダ13によってクラッシャ14に供給し、該クラッシャ14の固定歯14Aと可動歯14Bとの間で細かく破砕した後、この細粒化された被破砕物をベルトコンベヤ16によって破砕装置1の外部に排出する。この場合、上流側コンベヤフレーム17は、クラッシャ14から大きく離間した作業位置に保持されているので、被破砕物がクラッシャ14とベルトコンベヤ16との間に引掛かることがなく、破砕装置1を用いた破砕作業を円滑に行なうことができる。
次に、上流側コンベヤフレーム17を作業位置から走行位置へと戻す場合には、昇降シリンダ31のロッド31Cを、図7に示す作業位置から縮小させる。これにより、ロッド31Cに設けられた支持ローラ33は、ブラケット28を下側から支持しつつアーム29の垂下部29Bに沿って上方へ移動する。そして、支持ローラ33が、図5に示すようにアーム29の段部34に当接することにより、この段部34によって上流側コンベヤフレーム17を走行位置に保持することができる。
一方、例えばベルトコンベヤ16に対するメンテナンス作業を行うため、上流側コンベヤフレーム17を図8及び図9に示すメンテナンス位置に移動させる場合には、まず、アーム29に設けたストッパ取付孔29Cからストッパ35を取外す。そして、昇降シリンダ31のロッド31Cを伸長させ、支持ローラ33を作業位置よりもさらに下方へ移動させることにより、上流側コンベヤフレーム17は連結軸19を中心として下向きに回動し、図8及び図9に示すメンテナンス位置に向けて下降する。
このとき、上流側コンベヤフレーム17に設けたブラケット28は、ストッパ35に当接することがないので、上流側コンベヤフレーム17は、昇降シリンダ31(ロッド31C)が伸長するのに応じて、図8及び図9に示すメンテナンス位置まで下降することができる。これにより、上流側コンベヤフレーム17の基端側を地面に接地させて安定させることができ、かつ、上流側コンベヤフレーム17の基端側とクラッシャ14等との間に大きな作業空間を確保することができるので、ベルトコンベヤ16に対するメンテナンス作業を行なうときの作業性を高めることができる。
かくして、本実施の形態によれば、昇降シリンダ31のロッド31Cに設けた支持ローラ33が、上流側コンベヤフレーム17に設けたブラケット28を下側から支持することにより、昇降シリンダ31の伸縮動作に応じて上流側コンベヤフレーム17(ベルトコンベヤ16)を昇降させ、アーム29に設けた段部34に支持ローラ33が当接することにより上流側コンベヤフレーム17を走行位置に保持し、アーム29に設けたストッパ35にブラケット28が当接することにより上流側コンベヤフレーム17を作業位置に保持する構成としている。
従って、図4及び図5に示すように、昇降シリンダ31を縮小させて支持ローラ33をアーム29の段部34に当接させるだけで、上流側コンベヤフレーム17を走行位置に保持することができる。また、図6及び図7に示すように、昇降シリンダ31を伸長させて支持ローラ33を段部34から離脱させ、ブラケット28をアーム29のストッパ35に当接させるだけで、上流側コンベヤフレーム17を作業位置に保持することができる。
これにより、上流側コンベヤフレーム17を走行位置、作業位置に保持するための位置決めピン等を不要にすることができ、位置決めピン等の抜差し作業を行なうことなく、昇降シリンダ31を伸縮させるだけで、上流側コンベヤフレーム17を走行位置と作業位置とに容易に保持することができる。
しかも、ストッパ35をアーム29に着脱可能に設ける構成としたので、ストッパ35をアーム29に取付けた状態では、図7に示すように、昇降シリンダ31を伸長させて上流側コンベヤフレーム17を作業位置へと下降させるときに、上流側コンベヤフレーム17に設けたブラケット28がストッパ35に当接することにより、該ストッパ35によって上流側コンベヤフレーム17を作業位置に保持することができる。
この場合、上流側コンベヤフレーム17は、ブラケット28の下端縁28Bがストッパ35に当接することによって作業位置に保持されるので、例えば誤操作等によって昇降シリンダ31のロッド31Cを必要以上に伸長させてしまった場合でも、該ロッド31Cに設けた支持ローラ33がブラケット28から下方に離間するだけで、上流側コンベヤフレーム17を作業位置に確実に保持しておくことができる。従って、昇降シリンダ31の昇降動作を停止させるタイミングの許容誤差が大きくなり、その分、昇降シリンダ31の操作性を高めることができる。
一方、ストッパ35をアーム29から取外した状態では、図8及び図9に示すように、昇降シリンダ31を伸長させたとしても上流側コンベヤフレーム17のブラケット28がストッパ35に当接することがないので、上流側コンベヤフレーム17を作業位置よりも下側のメンテナンス位置に保持することができる。これにより、上流側コンベヤフレーム17の基端側とクラッシャ14等との間に大きな作業空間を確保することができ、ベルトコンベヤ16に対するメンテナンス作業を行なうときの作業性を高めることができる。
次に、図10及び図11は本発明の第2の実施の形態を示している。なお、本実施の形態では上述した第1の実施の形態と同一の構成要素に同一符号を付し、その説明を省略するものとする。
図中、41は上流側コンベヤフレーム17の基端側と走行体2との間に設けられた左,右のコンベヤ昇降機構(一方のみ図示)で、このコンベヤ昇降機構41は、後述の走行体側アーム42、コンベヤ側アーム43、昇降シリンダ31、ローラ44等により構成されている。
42は走行体2を構成するトラックフレーム3の横梁3Bに設けられた走行体側アームで、該走行体側アーム42は、左,右方向で対面しつつ前,後方向に延びる一対の板体等により、上,下方向に開口する中空部42Aをもった枠状に形成されている。そして、走行体側アーム42の中空部42A内には、後述のコンベヤ側アーム43が挿通される構成となっている。
43は上流側コンベヤフレーム17の基端側に設けられたコンベヤ側アームで、該コンベヤ側アーム43は、上流側コンベヤフレーム17の側面板17Aに固着され、上,下方向に延びている。そして、コンベヤ側アーム43は、上流側コンベヤフレーム17から上方に突出し、走行体側アーム42の中空部42A内に挿通されている。
ここで、コンベヤ側アーム43には、ローラ44が当接することにより上流側コンベヤフレーム17を図10に示す走行位置に保持する走行位置保持段部43Aと、上流側コンベヤフレーム17を図11に示す作業位置に保持する作業位置保持段部43Bとが、上,下に離間して形成されている。また、コンベヤ側アーム43のうち走行位置保持段部43Aと作業位置保持段部43Bとの間は、斜め上向きに傾斜する傾斜面43Cとなっている。
44は昇降シリンダ31のロッド31C先端部に回転可能に設けられたローラで、該ローラ44は、走行体側アーム42とコンベヤ側アーム43との間に挟込まれるものである。なお、昇降シリンダ31は、トラックフレーム3の横梁3Bに固定されたブラケット45に回動可能にピン結合されている。
本実施の形態によるコンベヤ昇降機構41は上述の如き構成を有するもので、図10に示すように、昇降シリンダ31のロッド31Cを伸長させた状態では、ローラ44が走行体側アーム42とコンベヤ側アーム43の走行位置保持段部43Aとの間に挟込まれることにより、上流側コンベヤフレーム17を走行位置に保持することができる。
一方、図11に示すように、昇降シリンダ31のロッド31Cを縮小させた状態では、ローラ44が、コンベヤ側アーム43の傾斜面43Cに沿って走行位置保持段部43Aから作業位置保持段部43Bへと移動し、該作業位置保持段部43Bと走行体側アーム42との間に挟込まれることにより、上流側コンベヤフレーム17を作業位置に保持することができる。
なお、上述した第1の実施の形態では、コンベヤ昇降機構27を構成するアーム29を、トラックフレーム3の横梁3Bに固定した場合を例示している。しかし、本発明はこれに限るものではなく、例えば本体フレーム7等の他の部材に固定する構成としてもよい。
また、上述した実施の形態では、上流側コンベヤフレーム17のブラケット28を下側から支持するコンベヤ支持部材として、昇降シリンダ31のロッド31Cに回転可能に取付けられ、アーム29の段部34上を転動する支持ローラ33を例示している。しかし、本発明によるコンベヤ支持部材は、支持ローラ33に限るものではなく、例えばアーム29の段部34上を摺動する摺動面をもった板体(滑り板)、段部34との当接面が円弧面となった棒状体等を用いて構成してもよい。
さらに、上述した実施の形態では、ベルトコンベヤ16のベースとなるコンベヤフレームを、連結軸19によって回動可能に連結された上流側コンベヤフレーム17と下流側コンベヤフレーム18とにより構成し、上流側コンベヤフレーム17の基端側と走行体2との間にコンベヤ昇降機構27を設けた場合を例示している。しかし、本発明はこれに限らず、例えば一体化されたコンベヤフレームを用い、この一体化されたコンベヤフレームの基端側と走行体との間にコンベヤ昇降機構を設ける構成としてもよい。