JP2007205831A - 微粒子検出装置および微粒子検出方法 - Google Patents
微粒子検出装置および微粒子検出方法 Download PDFInfo
- Publication number
- JP2007205831A JP2007205831A JP2006024174A JP2006024174A JP2007205831A JP 2007205831 A JP2007205831 A JP 2007205831A JP 2006024174 A JP2006024174 A JP 2006024174A JP 2006024174 A JP2006024174 A JP 2006024174A JP 2007205831 A JP2007205831 A JP 2007205831A
- Authority
- JP
- Japan
- Prior art keywords
- fluid
- fine particles
- cyclone
- fine
- particle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Sampling And Sample Adjustment (AREA)
Abstract
【課題】従来の微粒子検出装置においては、流体を採取する時間や位置による微粒子の量のばらつきが生じ、精度良く所望の微粒子を検出することができない、という課題があった。
【解決手段】任意の環境から採取された流体中の微粒子を検出するセンサである第一微粒子センサ2と、採取された流体から微粒子を分離する分離部3と、分離部3が微粒子を分離した後の流体中の微粒子を検出するセンサである第二微粒子センサ5と、第一微粒子センサ2および第二微粒子センサ5が、それぞれ検出した微粒子に応じて出力する信号に基づいて、採取された流体中の微粒子の量に関する値を演算する演算部8とを具備する。
【選択図】図1
【解決手段】任意の環境から採取された流体中の微粒子を検出するセンサである第一微粒子センサ2と、採取された流体から微粒子を分離する分離部3と、分離部3が微粒子を分離した後の流体中の微粒子を検出するセンサである第二微粒子センサ5と、第一微粒子センサ2および第二微粒子センサ5が、それぞれ検出した微粒子に応じて出力する信号に基づいて、採取された流体中の微粒子の量に関する値を演算する演算部8とを具備する。
【選択図】図1
Description
本発明は、流体中の微粒子を検出する微粒子検出装置等に関するものである。
従来の空気中の異物等の微粒子を検出する装置としては、例えば、監視領域や検出領域に光を照射して得られる散乱光を受光することで、微粒子を検出するようにしたものがある(例えば、特許文献1および特許文献2参照)。
また、このような異物等の微粒子を検出する装置を用いて、空気の清浄度を判断するための装置として、サンプリング管を水平に倒して、無塵空気発生器から出る無塵空気をサンプリングしてバックグラウンド計数値を測定し、サンプリング管を垂直に起こして、クリーンルーム内の空気を等速サンプリングしてクリーンルーム内の微粒子を測定し、これらのバックグラウンド計数値と測定対象データとを統計的に検定することで、クリーンルーム内の空気の清浄度を判断するものがある(例えば、特許文献3参照)。
特開7−151680号公報(第1頁、第1図等)
特開2000−356583号公報(第1頁、第1図等)
特公平8−30675号公報(第1頁、第1図等)
しかしながら、特許文献1および特許文献2に示すような、従来の微粒子を検出する装置においては、この装置が測定可能な微粒子を全て検出するため、所望の大きさや重さ等を基準として、この基準以上、または基準未満の微粒子だけを検出することができず、装置が測定可能な微粒子のうちの、所望の微粒子だけを選択的に検出することができない、という課題があった。
これに対し、特許文献3に示すような空気の清浄度を判断する装置においては、無塵空気発生器から出る無塵空気と、クリーンルーム内の空気とにそれぞれ含まれる微粒子の量を比較することが可能であった。このため、例えば、クリーンルーム内の空気の微粒子の量から、無塵空気の微粒子の量を減算することで、無塵空気発生器で除去可能な大きさの微粒子の量を算出したりすることが可能であった。この結果、例えば、無塵空気発生器内のフィルタの仕様を変更することで、除塵可能な微粒子のサイズを変更でき、検出可能な微粒子のサイズを変更することが可能であった。
しかしながら、特許文献3に示す装置においては、サンプリング管を動かすことで、サンプリングする空気を変更しているため、無塵空気発生器から出る無塵空気と、クリーンルーム内の空気とを同時にサンプリングすることができなかった。この結果、異なる時間における空気をサンプリングすることとなり、正確な判断結果を得ることができないという課題があった。特に、短時間で、一方の空気中の微粒子量が大きく変換した場合、判断結果に時系列的なばらつきが生じ、正確な判断結果が得られない可能性が高くなっていた。
また、特許文献3に示す装置においては、サンプリング管を物理的に切り替える必要があるため、サンプリング管を切り替える際に時間を要する。しかしながら、一方の空気をサンプリングしている間は、サンプリング処理等を行うことができず、また、一方の空気から微粒子を検出しても、他方の空気から微粒子を検出するまでは、清浄度等の処理結果を算出することができないため、上記のような切り替えに時間がかかることで、微粒子を検出する処理をリアルタイム、あるいはリアルタイムに近い時間間隔で行うことや、連続的に処理を行うことができないという課題があった。
さらに、特許文献3に示す装置においては、2つの異なる位置から空気をサンプリングすることとなるため、厳密には同じ空気をサンプリングしたことにはならず、精度の高い判断結果が得られないという課題があった。
本発明の微粒子検出装置は、任意の環境から採取された流体中の微粒子を検出するセンサである第一微粒子センサと、前記採取された流体から微粒子を分離する分離部と、前記分離部が微粒子を分離した後の流体中の微粒子を検出するセンサである第二微粒子センサとを具備する微粒子検出装置である。
かかる構成により、同時に同じ場所から採取した流体に対して分離部により所望の微粒子を分離した場合と分離していない場合とにおいて、流体中の微粒子を検出することができ、採取する時間による微粒子の量のばらつきや、採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができ、精度良く流体中の微粒子の量に関する値、例えば分離比を得ることができる。また、例えば、流体を連続的に採取できるようにすることにより、微粒子の検出を連続的に、かつリアルタイムに行うことが可能となる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記任意の環境から前記流体を採取し、採取した流体を前記第一微粒子センサと、前記分離部とに、分割して送り込む管である採取管をさらに具備し、前記第一微粒子センサは、前記採取管により分割されて送り込まれる流体中の微粒子を検出し、前記分離部は、前記採取管により分割されて送り込まれる流体中の微粒子を、前記流体から分離する微粒子検出装置である。
かかる構成により、同時に同じ場所から採取した流体に対して、分離部により微粒子の分離を行った場合と、分離を行っていない場合との、流体中の微粒子の検出を、同時に行うことができ、流体の採取から、微粒子の検出結果を得るまでの時間差を最小限にすることができる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記分離部は、前記第一微粒子センサが微粒子を検出した後の流体から、微粒子を分離する微粒子検出装置である。
かかる構成により、採取した流体を分割するための分岐構造等が不要となり、装置の構成を簡略化し、小型化を図ることができる。また装置内における各部の配置等の設計の自由度も向上する。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記分離部は、フィルタである微粒子検出装置である。
かかる構成により、フィルタの種類を変更することで、分離部で分離する所望の微粒子を容易に変更することができる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記分離部は、重力沈降室である微粒子検出装置である。
かかる構成により、所定の微粒子を、主として重さに基づいて沈降させて、分離することができる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、流体中の微粒子を分離するサイクロンであって、任意の環境から採取された流体を吸入する吸入部と、微粒子が分離された流体を排出する排出部と、分離された微粒子を排出する微粒子排出部とを有するサイクロンと、前記吸入部、排出部、微粒子排出部のうちの異なるいずれかに個別に設けられた、流体中の微粒子を検出するセンサである第一および第二微粒子センサとを具備する微粒子検出装置である。
かかる構成により、同時に同じ場所から採取した流体に対しサイクロンにより所望の微粒子を分離した前または後の流体中の微粒子、あるいはサイクロンによりこの採取した流体から分離した微粒子のいずれか2つを検出することができ、採取する時間による微粒子の量のばらつきや、採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができ、精度良く流体中の微粒子の量に関する値、例えば分離比を得ることができる。また、サイクロンを用いることで、分離した微粒子の量の検出が可能となるとともに、分離した微粒子を取り出して確認することができる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、流体中の微粒子を分離するサイクロンであって、任意の環境から採取された流体を吸入する第一吸入部と、微粒子が分離された流体を排出する第一排出部と、分離された微粒子を排出する第一微粒子排出部とを有する第一サイクロンと、流体中の微粒子を分離するサイクロンであって、前記第一サイクロンよりも分離能力が優れており、前記第一排出部から排出された流体を吸入する第二吸入部と、微粒子が分離された流体を排出する第二排出部と、分離された微粒子を排出する第二微粒子排出部とを有する第二サイクロンと、前記第一微粒子排出部に設けられた、流体中の微粒子を検出するセンサである第一微粒子センサと、前記第二微粒子排出部に設けられた、流体中の微粒子を検出するセンサである第二微粒子センサとを具備する微粒子検出装置である。
かかる構成により、同じ流体について、第一サイクロンにより分離可能な流体中に含まれる所望の微粒子の量と、この所望の微粒子以外の第二サイクロンにより分離可能な微粒子の量とを検出することができ、採取する時間による微粒子の量のばらつきや、採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができ、精度良く流体中の微粒子の量に関する値、例えば分離比を得ることができる。また、第一および第二サイクロンを用いることで、分離した微粒子の量の検出が可能となるとともに、分離した微粒子を取り出して確認することができる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記第一および第二微粒子センサが、それぞれ検出した微粒子に応じて出力する信号に基づいて、前記任意の環境から採取された流体中の微粒子の量に関する値を演算する演算部と、前記演算部が演算して得た値を出力する演算出力部とを具備する微粒子検出装置である。
かかる構成により、流体中の微粒子の量に関する値を得ることができる。特に、分離比等の、流体中の所望の微粒子や、流体中の全ての微粒子や、所望の微粒子以外の微粒子等との比や、比率を演算部により求めるようにすることで、採取する流体の量等の影響を補正した微粒子の状況を示すことが可能となる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記第一および第二微粒子センサが、それぞれ検出した微粒子に応じて出力する信号に基づいて、前記任意の環境から採取された流体中の微粒子の量に関する値を演算する演算部と、前記演算部が演算して得た値を、所定の値と比較し、その比較結果を取得する比較部と、前記比較部の取得した比較結果に基づいた出力を行う出力部を具備する微粒子検出装置である。
かかる構成により、分離部により分離される所望の微粒子の量に関する値が所定の範囲内、例えば正常な範囲内にあるか否かを出力することが可能となる。この結果、例えば、ユーザは、流体を採取している箇所における微粒子の発生状況が正常であるか否かを知ることが可能となる。
また、本発明の微粒子検出装置は、前記微粒子検出装置において、前記任意の環境から流体を連続的に吸引して、前記任意の環境から流体を採取する吸引装置をさらに具備する
微粒子検出装置である。
微粒子検出装置である。
かかる構成により、流体を連続的に採取することが可能となり、微粒子の検出を連続的に、かつリアルタイムに行うことが可能となる。
本発明による微粒子検出装置等によれば、流体を採取する時間による微粒子の量のばらつきや、流体を採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができる。また、微粒子を検出する処理を連続的に行うことができる。
以下、微粒子検出装置等の実施形態について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
(実施の形態1)
図1は、本実施の形態における微粒子検出装置の構成を示す模式図である。
図1は、本実施の形態における微粒子検出装置の構成を示す模式図である。
微粒子検出装置100は、採取管1、第一微粒子センサ2、分離部3、配管4、第二微粒子センサ5、配管6、吸引装置7、演算部8、演算出力部9を具備する。
採取管1は、任意の環境から流体を吸入して採取するための管、すなわち中空の筒である。採取管1の材質やサイズ等は問わない。この実施の形態においては、特に、採取管1の、流体を吸入する側の反対側、すなわち排出側が、二つの管に分岐している場合について説明する。この分岐している2つの管の太さ等はほぼ同じであることが好ましい。ここで述べる流体とは、例えば、空気や窒素ガス等の気体や、水や溶液等の液体である。液体は、透明な液体であっても不透明な液体であっても良い。
第一微粒子センサ2は、任意の環境から採取された流体中の微粒子を検出するセンサである。第一微粒子センサ2は、採取管1の2つに分岐した排出側の一方に接続され、採取管1が吸入した流体が分割されて送り込まれる。第一微粒子センサ2は、微粒子を検出した結果をどのような信号として出力しても良い。例えば、1つの微粒子を検出するごとに、微粒子を検出したことを示すパルス等の信号を出力するものであっても良いし、このようなパルスを所定時間だけカウントした計数値を信号として出力するものであっても良い。また、検出した微粒子の数等に対応した値を持つ信号を出力するものであってもよい。このようなセンサとしては、気体中の微粒子を検出するセンサや、液体中の微粒子を検出するセンサ等が利用可能である。気体中の微粒子を検出するセンサとしては、いわゆるほこりセンサや、パーティクルセンサと呼ばれるもの等が利用可能である。このようなセンサの構成については、例えば、上述した特許文献1や特許文献2等において説明したように公知であるので、詳細な説明は省略する。また、液体中の微粒子を検出するセンサとしては、液体用の光散乱式粒子測定装置や、コールター原理を利用した粒子測定装置等に用いられるセンサが利用可能である。特に、コールター原理を利用した粒子測定装置のセンサを用いれば、不透明な液体中の微粒子を測定することが可能である。コールター原理とは、粒子が測定領域を通過する際に生じる、2電極間の電気抵抗が、粒子の体積に比例して変化するという原理であり、この原理を用いたセンサによれば、電解液の流れる量を精密に制御して、電気抵抗を測定することで、粒子の正確な体積から大きさや個数を測定することが可能とするものである。また、その他のセンサとしては、例えば、真空中の発塵を測定可能なセンサや、静電容量の変化により粉体の量の測定を行う静電気型の粉体流量センサを利用することも可能である。なお、上述したような液体用の光散乱式粒子測定装置や、コールター原理を利用した粒子測定装置等に用いられるセンサや、真空中の発塵を測定可能なセンサや、静電気型の粉体流量センサ等については、公知技術であるので、詳細な構成についての説明は省略する。なお、ここでは、第一微粒子センサ2は、採取管1および配管6と接続されている部分以外は密封されているものとする。「微粒子」とは、ここでは、採取管1から流体とともに吸い上げることができる異物等の小さな物質を指す。例えば、「微粒子」には、いわゆるほこりや、プラスチックや金属等のバリや、破片、くず等が含まれる。
分離部3は、任意の環境から採取された流体から微粒子を分離する。ただし、この流体は、第一微粒子センサ2が微粒子を検出する際の対象となる流体と同じ地点から、同じ時間に採取された流体である。具体的には、分離部3は、採取管1の2つに分岐した排出側の、第一微粒子センサ2が接続された方とは異なる一方に接続される。採取管1が吸入した流体は、採取管1が分岐していることから、第一微粒子センサ2と分離部3とに分割されて送り込まれる。このため、第一微粒子センサ2と分離部3とに送り込まれる流体は同じ流体と考えることができる。分離部3は、所望の大きさや重さの微粒子を流体から分離することができるものであれば、どのようなものであっても良い。ここでは、具体例として、分離部3としてフィルタを用いた場合について説明する。このフィルタは、一般的に流体用のフィルタとして利用可能なものであれば、どのようなフィルタを用いても良い。フィルタとしては、例えば、不織布や、スポンジ等の多孔性物質等が利用可能である。また、採取管1が採取する流体が空気であれば、HEPAフィルタ(High Efficiency Particulate Air Filter)等が利用可能である。フィルタの材質等を選択することにより、流体から分離できる微粒子の大きさを、所望の大きさに設定することができる。例えば、フィルタの目が細かければ、分離できる微粒子の最小サイズを小さくすることができ、フィルタの目が粗ければ、分離できる微粒子の最小サイズを大きくすることができる。そして、分離部3は、微粒子を分離した後の流体を後述する配管4に排出する。
配管4は、分離部3が排出した、微粒子を分離した流体を、第二微粒子センサ5に送り込むための管である。配管4の材質やサイズ等は問わない。
第二微粒子センサ5は、分離部3が微粒子を分離した後の流体中の微粒子を検出するセンサである。第二微粒子センサ5は、配管4と接続され、分離部3が排出した流体が送り込まれる。第二微粒子センサ5の、他の構成については、第一微粒子センサ2と同様であるので、説明は省略する。なお、ここでは、第二微粒子センサ5も配管4および配管6と接続されている部分以外は密封されているものとする。
配管6は、第一微粒子センサ2と第二微粒子センサ5とが、微粒子を検出した流体を、吸引装置7に送り込むための管である。配管6の材質やサイズ等は問わない。ここでは、配管6は、吸入側が二つに分岐した構造となっており、分岐した一方が、第一微粒子センサ2の排出側に、他方が、第二微粒子センサ5の排出側に接続されている。また、配管6の排出側が、吸引装置7に接続されている。
吸引装置7は、流体を吸引する。吸引装置7は、配管6と接続されており、配管6を通じて流体を吸引することにより、第一微粒子センサ2と、第二微粒子センサ5、配管4、および分離部3とを経て、採取管1から、任意の環境の流体が採取される。吸引装置7は、流体を連続的に吸引することが可能である。吸引装置7が連続的に流体を吸引することにより、結果的に、採取管1を用いて、流体を任意の環境から連続的に採取することが可能となる。吸引装置7の構成は、配管6を通じた流体の吸引が可能な構成であれば、どのような構成であっても良い。例えば、吸引装置7は、例えば、空気清浄機や掃除機等に用いられるファン等であっても良いし、ポンプ等であっても良い。なお、吸引装置7の構成については、公知技術であるので、詳細な説明は省略する。なお、ここでは、配管6を分岐した構造とし、1つの吸引装置7で、第一微粒子センサ2および第二微粒子センサ5から配管6を介して流体を吸引する場合について説明しているが、吸引装置7を二つ設け、それぞれを、分岐のない配管を用いて第一微粒子センサ2および第二微粒子センサ5と接続して、各吸引装置7から別々に流体を吸引するようにしても良い。
演算部8は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ検出した微粒子に応じて出力する信号に基づいて、任意の環境から採取された流体中の微粒子の量に関する値を演算する。第一微粒子センサ2および第二微粒子センサ5が出力する、「それぞれ検出した微粒子に応じて出力する信号」とは、微粒子の量を演算部8が取得可能な信号であればよく、例えば、上述したように、1つの微粒子を検出したごとに出力されるパルス等の信号であっても良いし、このパルスの数をカウントした微粒子の計数値であっても良い。また、微粒子の数等に対応した値をもつ信号であってもよい。第一微粒子センサ2および第二微粒子センサ5がそれぞれ出力する信号が、微粒子を検出したごとに出力されるパルス等の信号である場合には、このパルスの数を計数することにより、微粒子の量を取得することができる。また、微粒子の数等に対応した値をもつ信号であれば、この信号から得られる値を、加算していくことで、微粒子の量を取得することができる。演算部8が演算する「流体中の微粒子の量に関する値」とは、具体的には、分離部3により分離された微粒子の量に関連した値である。演算部8は、ここでは具体的に、この値を、分離部3により微粒子が分離される前の流体中の微粒子の量(以下、Niとする)と、分離部3により微粒子が分離された後の流体中の微粒子の量(以下、Ntとする)とから、演算により求める。ここでは、第一微粒子センサ2が出力する信号から得られる微粒子の量をNiとして用い、第二微粒子センサ5が出力する信号から得られる微粒子の量をNtとして用いる。例えば、「流体中の微粒子の量に関する値」を、分離部3により分離した微粒子の量、すなわちフィルタにより分離可能な大きさの微粒子の量とすると、演算部8は、分離部3による微粒子の分離が行われていない流体中の微粒子の量Niから分離部3により微粒子の分離が行われた流体中の微粒子の量Ntを減算すること、すなわちNi−Ntを求めることにより、この分離部3により分離した微粒子の量を求めることができる。フィルタにより分離可能な大きさの微粒子の量が流体中に増えると、このNi−Ntの値が大きくなる。また、分離部3により微粒子が分離された流体中の微粒子の量Ntと、このNi−Ntとの比、Nt:(Ni−Nt)を「流体中の微粒子の量に関する値」として求めても良い。ここでは、このNt:(Ni−Nt)を分離比Sと呼ぶ。分離比Sは、S=(Ni−Nt)/Ntと表しても良い。また、フィルタによる分離が行われていない流体中の微粒子の量と、フィルタにより分離した微粒子の量との比、Ni:(Ni−Nt)を求めても良い。これらのような比を用いることにより、採取管1から採取する流体の量等が大きく変動した場合においても、フィルタにより分離される微粒子の、フィルタにより分離できない微粒子、あるいは、フィルタにより分離を行う前の流体中の微粒子に対する相対的な量を認識することができ、採取する流体の量に依存せずに、流体中の微粒子の状況を正確に把握することが可能となる。演算部8は、上記のような演算を、定期や不定期の間隔で、連続的に実行しても良い。演算部8は、通常、MPUやメモリ等から実現され得る。演算部8の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
演算出力部9は、演算部8が演算して得た値を出力する。演算出力部9は、演算部8が演算して得た値を、数値として出力しても良いし、グラフ等に変換して出力しても良い。また、演算出力部9は、演算部8が演算して得た値を不揮発性の記憶媒体や、揮発性の記憶媒体等に蓄積しても良い。演算出力部9は、ディスプレイやスピーカー等の出力デバイスを含むと考えても含まないと考えても良い。演算出力部9は、出力デバイスのドライバーソフトまたは、出力デバイスのドライバーソフトと出力デバイス等で実現され得る。また、出力するためのデータを構成するためのMPUやメモリ等を備えていても良い。出力とは、ディスプレイへの表示、プリンタへの印字、音出力、記憶媒体への蓄積、外部の装置への送信等を含む概念である。
なお、この微粒子検出装置100においては、採取管1が吸入した流体が、第一微粒子センサ2に達する時間と、分離部3および配管4を経て第二微粒子センサ5に達する時間が同じとなるように、採取管1の分岐した部分の長さや、配管4の長さ等を調整しておくことが好適である。
また、このような調整を行う代わりに、演算部8が演算を行う際に、採取管1が吸入した流体が、第一微粒子センサ2に達する時間と、分離部3および配管4を経て第二微粒子センサ5に達する時間との時間差を補正して、同じ流体中の微粒子を検出して得られた信号同士を演算処理できるようにしても良い。
次に、微粒子検出装置100の動作について図2のフローチャートを用いて説明する。なお、ここでは、第一微粒子センサ2と、第二微粒子センサ5とが、それぞれ、微粒子を1つ検出するごとに、1つのパルスを演算部8に出力する場合を例に挙げて説明する。
(ステップS201)吸引装置7は、吸引を開始する。
(ステップS202)演算部8は、カウンターKに0を代入する。
(ステップS203)演算部8は、カウンターLに0を代入する。
(ステップS204)演算部8は、第一微粒子センサ2が、微粒子を検出したか否かを判断する。具体的には、演算部8は、微粒子を検出したことを示すパルスを第一微粒子センサ2から受け付けた場合、微粒子を検出したと判断し、受け付けていない場合、検出していないと判断する。微粒子を検出した場合、ステップS205に進み、検出していない場合、ステップS206に進む。
(ステップS205)演算部8は、カウンターKを1インクリメントする。
(ステップS206)演算部8は、ステップS204と同様に、第二微粒子センサ5が、微粒子を検出したか否かを判断する。微粒子を検出した場合、ステップS207に進み、検出していない場合、ステップS208に進む。
(ステップS207)演算部8は、カウンターLを1インクリメントする。
(ステップS208)演算部8は、直前のステップS202の開始から、所定の時間tが経過したか否かを判定する。経過した場合、ステップS209に進み、経過していない場合、ステップS204に戻る。このtの値は、検出する微粒子の量等に応じて適宜設定する。例えば、流体中の微粒子が少ない場合には、tの値を大きくし、微粒子が多い場合には、tの値を、1秒以下等の、小さな値に設定すればよい。
(ステップS209)演算部8は、分離比Sを求める。具体的には、ここでは、カウンターLの値を、分離部3により微粒子を分離した後の流体中の微粒子の量、すなわち微粒子量Ntとし、カウンターKの値を、分離部3による微粒子の分離が行われていない流体中の微粒子量Niとする。このため、演算部8は、上述した分離比Sとして、Nt:(Ni−Nt)=L:(K−L)を求める。
(ステップS210)演算出力部9は、演算部8が演算により求めた分離比Sを出力する。例えば、演算出力部9は、分離比Sをディスプレイ(図示せず)等に表示する。そして、ステップS202に戻る。
なお、図2のフローチャートにおいて、ステップS202とステップS203との処理順番は問わない。また、ステップS204およびステップS205と、ステップS206とステップS207との処理順番を入れ替えても良い。
なお、図2のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
(具体例1)
以下、本実施の形態における微粒子検出装置の具体的な動作について説明する。なお、この具体例においては、採取管1が採取する流体が気体、特に空気(大気)である場合について説明する。
以下、本実施の形態における微粒子検出装置の具体的な動作について説明する。なお、この具体例においては、採取管1が採取する流体が気体、特に空気(大気)である場合について説明する。
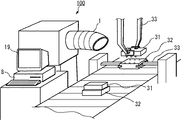
図3は、本具体例における微粒子検出装置100の動作を説明するための概略図である。ここでは微粒子検出装置100は、出力デバイスとしてディスプレイ19を有している。図3において、図1と同一符号は同一または相当する部分を示している。
ここでは、例として、微小な部品の自動組み立てラインにおける、部品を組み立てる装置である組立装置33を用いた部品31と部品32とのはめ込み作業を行う箇所に、採取管1が設置されているものとする。そして、微粒子検出装置100は、はめ込み作業時に発生するバリ等の微粒子を吸引して集塵する集塵機を兼用にしているものとする。
まず、吸引装置7による吸引を開始させると、はめ込み作業を行っている箇所近傍の空気の、採取管1による吸入、すなわち採取が開始される。そして、第一微粒子センサ2により、採取管1が吸入した空気中の微粒子の検出が開始される。また、第二微粒子センサ5により、分離部3により採取管1が吸入した空気から微粒子を分離して得られた空気中の微粒子の検出が開始される。そして、第一微粒子センサ2および第二微粒子センサ5は、それぞれ、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部8に対して出力する。
演算部8は、所定の時間tの間に、第一微粒子センサ2および第二微粒子センサ5からそれぞれ送信されるパルス信号の数を、それぞれカウントする。これらのカウント値が、第一微粒子センサ2が検出した微粒子量と、第二微粒子センサ5が検出した微粒子量となる。ここでは、第一微粒子センサ2が検出した微粒子量は、微粒子を分離する前の空気中の微粒子の量Niに相当し、第二微粒子センサ5が検出した微粒子の量は、微粒子を分離した後の空気中の微粒子の量Ntに相当する。この時間tの値はどのような値であっても良い。例えば、時間tを、1つの部品の組み立てが開始されてから、次の部品の組み立てが開始されるまでの時間等に設定するようにしてもよい。このようにすれば、部品を1つ組み立てる間に発生する微粒子の量に関する値を、各部品について比較することができる。また、例えば、最終的に演算により求めた分離比等を時間経過に沿ったグラフ等で出力する場合、時間tを数秒に設定してもよい。
演算部8は、時間tが経過すると、所定の時間t内における第一微粒子センサ2が検出した微粒子量をNiの値とし、第二微粒子センサ5が検出した微粒子量をNtの値として、これらの値から、分離比Sを求める。そして、この分離比Sを演算出力部9がディスプレイ19に出力する。その後、同様の処理が、順次繰り返して実行される。
ユーザは、この出力を見ることで、部品の組み立てが行われている箇所の所望の微粒子の発生状況を、リアルタイムに、連続的にモニタすることができる。
通常、さまざまな装置の製造工程等においては、部品を組み立てる際等には、バリ等の異物が発生するが、組立装置等が正常に動いている限りは、発生する異物等の微粒子の量や、発生する微粒子の種類には、一定の傾向があると考えられる。しかし、組立装置等の動作に、ずれ等が発生した場合、組み立てに無理な力が加わったりして、本来は発生しないと考えられる所定以上のサイズや重さの微粒子が発生したり、正常時の微粒子の発生傾向とは異なる、多量の微粒子が発生したりすること等が考えられる。従って、このような製造工程等において発生する異物等の微粒子の大きさや重さや発生量等の発生状況を監視すれば、製造工程の異常を発見することが可能となる。このため、本実施の形態による微粒子検出装置100を用いて、所望の微粒子、ここでは分離部3により分離できる微粒子、あるいは分離できない微粒子、の発生状況をモニタすることで、製造工程の異常等を発見することが可能となる。
なお、この具体例では、組立装置33の周辺の空気(大気)を吸引しているが、空気中にもともと存在する微粒子(ほこり等)が多くて、組み立て時に発生する微粒子を検出する上で、無視できない誤差となる場合が考えられる。このような場合においては、採取管1や組み立ての対象となる部品31、部品32等を、クリーンルームやクリーンブースのような外気を遮断した小部屋やクリーンボックスのような容器等に密閉し、ほこり等を除去した空気をその小部屋や容器等に供給し、その小部屋や容器内で部品の組み立てを行うようにし、その小部屋や容器内の空気を吸引装置7により吸引するようにしてもよい。このようにすれば、できる限り組立部品の組み立てにより発生した微粒子だけを吸引できるようにすることができる。
また、組立装置33や部品31、部品32等の周辺の気体として、空気以外の気体、例えば、窒素ガス等の気体を使用している場合においても本実施の形態は適用可能である。例えば、部品31、部品32等が酸素等で変質するため、製造自体を窒素ガス等の雰囲気下でおこなっているような場合においても本実施の形態は適用可能である。この場合、上記と同様に、採取管や組み立ての対象となる部品等を、外気を遮断した小部屋や容器等に密閉し、酸素を有さない気体、例えば窒素ガス等の不活性ガスをその小部屋や容器等に供給し、その小部屋や容器内で部品の組み立てを行うようにし、その小部屋や容器内の気体を吸引装置7により吸引するようにしてもよい。
なお、この具体例では、組立装置33の周辺の空気(大気)を吸引しているが、空気中にもともと存在する微粒子(ほこり等)が多くて、組み立て時に発生する微粒子を検出する上で、無視できない誤差となる場合が考えられる。このような場合においては、採取管1や組み立ての対象となる部品31、部品32等を、クリーンルームやクリーンブースのような外気を遮断した小部屋やクリーンボックスのような容器等に密閉し、ほこり等を除去した空気をその小部屋や容器等に供給し、その小部屋や容器内で部品の組み立てを行うようにし、その小部屋や容器内の空気を吸引装置7により吸引するようにしてもよい。このようにすれば、できる限り組立部品の組み立てにより発生した微粒子だけを吸引できるようにすることができる。
また、組立装置33や部品31、部品32等の周辺の気体として、空気以外の気体、例えば、窒素ガス等の気体を使用している場合においても本実施の形態は適用可能である。例えば、部品31、部品32等が酸素等で変質するため、製造自体を窒素ガス等の雰囲気下でおこなっているような場合においても本実施の形態は適用可能である。この場合、上記と同様に、採取管や組み立ての対象となる部品等を、外気を遮断した小部屋や容器等に密閉し、酸素を有さない気体、例えば窒素ガス等の不活性ガスをその小部屋や容器等に供給し、その小部屋や容器内で部品の組み立てを行うようにし、その小部屋や容器内の気体を吸引装置7により吸引するようにしてもよい。
(具体例2)
次に、本実施の形態における微粒子検出装置の具体的な動作について、採取管1が採取する流体が、液体、特に水である場合について説明する。
次に、本実施の形態における微粒子検出装置の具体的な動作について、採取管1が採取する流体が、液体、特に水である場合について説明する。
図4は、本具体例における微粒子検出装置100aの動作を説明するための概略図である。ここでは微粒子検出装置100aは、組み立てている部品に水をかけて洗浄するための洗浄ノズル140と、洗浄後の水を回収する回収シンク141を有しているものとする。洗浄ノズル140は、図示しない蛇口や給水タンク等と接続されており、出水量は、一定にコントロールされているものとする。また、回収シンク141の排水口142は、採取管1に接続されている。なお、図4において、図3と同一符号は同一または相当する部分を示している。また、微粒子検出装置100aは、洗浄ノズル140および回収シンク141以外の構成については、微粒子検出装置100と同様の構成を有しているものとする。ただし、ここでは、第一微粒子センサ2および第二微粒子センサ5として、水中の微粒子の測定が可能なセンサ、例えば、コールター原理を使用したセンサを用いるようにする。
ここでは、上記の具体例1と同様に、微小な部品の自動組み立てラインにおける、部品を組み立てる装置である組立装置33を用いた部品31と部品32とのはめ込み作業を行う箇所上に、洗浄ノズル140が配置され、洗浄ノズル140の下方に回収シンク141が設置されているものとする。
まず、給水ノズル110から水を出水させてはめ込み作業を行っている部品の近傍の洗浄を開始し、吸引装置7による吸引を開始させると、洗浄後の水が回収シンク141により回収され、排水口142を経て、採取管1により吸入、すなわち採取される。そして、第一微粒子センサ2により、採取管1が吸入した水中の微粒子の検出が開始される。また、第二微粒子センサ5により、分離部3により採取管1が吸入した水から微粒子を分離して得られた水中の微粒子の検出が開始される。そして、第一微粒子センサ2および第二微粒子センサ5は、それぞれ、微粒子の個数の測定結果を示す信号を、演算部8に対して順次出力する。そして、演算部8は、所定の時間tの間に、第一微粒子センサ2および第二微粒子センサ5がそれぞれ検出した微粒子の個数の測定結果の合計を求め、得られた微粒子の個数を、それぞれ第一微粒子センサ2が検出した微粒子量と、第二微粒子センサ5が検出した微粒子量として用いて、上記具体例1と同様に、分離比Sを求める処理等を行う。これ以降の処理については、上記具体例1と同様であるので説明は省略する。
このように、本実施の形態の構成は、微粒子の検出対象となる流体が、液体である場合においても適用可能なものであり、このように液体に適用した場合においても、気体に対して適用した場合と同様の効果を得ることが可能である。
以上、本実施の形態によれば、同時に同じ場所から採取した流体から、第一微粒子センサ2においては、微粒子を検出するとともに、第二微粒子センサ5においては、分離部3により所望の微粒子を分離後に、微粒子を検出するようにしたので、採取する時間による微粒子の量のばらつきや、採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができ、精度良く流体中の微粒子の量に関する値、例えば分離比を得ることができる。
また、第一微粒子センサ2と第二微粒子センサ5とが同時に微粒子を検出する処理を行うことができ、所望の微粒子を検出する処理や、流体中の微粒子の量に関する値を取得する処理を連続的に行うことができる。
また、第一微粒子センサ2と第二微粒子センサ5とが同時に微粒子を検出した直後に、微粒子の量に関する値を出力することができ、リアルタイムな処理を行うことができる。
なお、上記実施の形態においては、分離部3がフィルタである場合について説明したが、本発明においては、採取管1が採取する流体が気体であれば、分離部として、フィルタの代わりに、図5の模式図に示すような粘着性を有するとともに通気性を有する粘着シート30aを備えた分離部3aを用いるようにしても良い。このような分離部3aを用いると、所定の大きさや重さの微粒子31a等を、粘着シート30aに付着させて分離することができる。かかることは他の実施の形態においても同様である。
また、採取管1が採取する流体が気体であれば、分離部として、図6の模式図に示すようなミストシャワー等を発生させるためのミストシャワー発生器30bを備えた分離部3bを用いるようにしても良い。このような分離部3bを用いることで、所定の大きさや重さの微粒子31b等を、ミストシャワーに付着させて分離することができる。かかることは他の実施の形態においても同様である。
また、分離部3として、図7に示すような重力沈降室3cを用いるようにしてもよい。このような重力沈降室3cに流体が流入すると、流体の流れる速度が急速に遅くなり、所望の大きさや重さの微粒子31c等を、沈降させて分離することが可能となる。例えば、流体中に、径が約1μm程度の、同程度の大きさの樹脂の微粒子と金属の微粒子とが含まれている場合、金属の微粒子だけを、重力沈降室3cにおいて沈降させて分離することが可能となる。なお、どのような微粒子を分離するかは、重力沈降室3cの設計により変更することが可能である。なお、かかることは他の実施の形態においても同様である。
ただし、重力沈降室3cを使用する場合は、流体の比重よりも分離する微粒子の比重が大きいことが条件となる。たとえば、流体が空気の場合は、ほぼすべての種類の微粒子が分離可能である。しかし、流体が水(比重=1)の場合は、金属等の微粒子(比重>1)なら分離可能だが、樹脂等の微粒子(比重≦1)は分離不能である。
ただし、重力沈降室3cを使用する場合は、流体の比重よりも分離する微粒子の比重が大きいことが条件となる。たとえば、流体が空気の場合は、ほぼすべての種類の微粒子が分離可能である。しかし、流体が水(比重=1)の場合は、金属等の微粒子(比重>1)なら分離可能だが、樹脂等の微粒子(比重≦1)は分離不能である。
なお、上述したような粘着シート30aや、ミストシャワー発生器30bや、重力沈降室3cの構成については公知技術であるので詳細な説明はここでは省略する。
また、本実施の形態においては、吸引装置7により吸引を行うことで、各部に流体が送り込まれるようにしたが、本発明においては、各部に、流体が送り込むことができれば、どのような構成により流体を送り込むようにしても良い。例えば、各部に採取管1の前等に、流体を吸引して、採取管1等に強制的に送り込む送り込み装置等を設けるようにしてもよい。かかることは他の実施の形態においても同様である。
(実施の形態2)
本実施の形態に係る微粒子検出装置は、上記実施の形態1に係る微粒子検出装置において、吸入、すなわち採取した流体を分割して第一微粒子センサと分離部3とに送り込む代わりに、採取した流体を第一微粒子センサに送り込んだ後、第一微粒子センサから排出される流体を分離部3に送り込むようにしたものである。
本実施の形態に係る微粒子検出装置は、上記実施の形態1に係る微粒子検出装置において、吸入、すなわち採取した流体を分割して第一微粒子センサと分離部3とに送り込む代わりに、採取した流体を第一微粒子センサに送り込んだ後、第一微粒子センサから排出される流体を分離部3に送り込むようにしたものである。
図8は、本実施の形態における微粒子検出装置の模式図である。
微粒子検出装置101は、採取管10、第一微粒子センサ2、配管11、分離部3、配管4、第二微粒子センサ5、配管12、吸引装置7、演算部18、演算出力部9を具備する。
微粒子検出装置101は、採取管10、第一微粒子センサ2、配管11、分離部3、配管4、第二微粒子センサ5、配管12、吸引装置7、演算部18、演算出力部9を具備する。
第一微粒子センサ2、分離部3、配管4、第二微粒子センサ5、吸引装置7、演算出力部9の構成については、上記実施の形態1と同様であるので、詳細な説明は省略する。ただし、第一微粒子センサ2には、採取管10が吸入した流体が演算される。また、第一微粒子センサ2が排出した流体は、配管11を介して分離部3に送り込まれる。
採取管10は、任意の環境から流体を吸入して採取するための管、すなわち中空の筒である。採取管1の材質やサイズ等は問わない。この実施の形態においては、採取管10の排出側は、第一微粒子センサ2に接続されている。
配管11は、第一微粒子センサ2が排出した流体を、分離部3に送り込むための管である。配管11の材質やサイズ等は問わない。
配管12は、第二微粒子センサ5が排出した流体を、吸引装置7に送り込むための管である。配管12の材質やサイズ等は問わない。
演算部18は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ検出した微粒子に応じて出力する信号に基づいて、任意の環境から採取された流体中の微粒子の量に関する値を演算する。演算部18の構成は、演算部8の構成と同様である。ただし、ここでは、採取管1が吸入した流体が、第一微粒子センサ2に達する時間と、第一微粒子センサ2が排出した流体が、配管11、分離部3および配管4を経て第二微粒子センサ5に達する時間との間に、時間差が生じるため、この時間差を補正して、同じ流体中の微粒子を検出して得られた信号同士を演算処理できるようにする、あるいはこの時間差が補正されるように、第二微粒子センサが微粒子の検出を開始する時間を、上記の時間差分だけ遅らせることが、正確な微粒子の量に関する値を得る上で好ましい。
次に、微粒子検出装置の動作について図9のフローチャートを用いて説明する。なお、ここでは、例として、第一微粒子センサ2から排出された流体が、第二微粒子センサ5に送り込まれるまでの時間がm秒であるとし、この時間分だけ、第二微粒子センサ5の動作開始時刻を、第一微粒子センサ2の動作開始時刻から遅らせるようにした場合について説明する。
(ステップS901)吸引装置7は、吸引を開始する。
(ステップS902)演算部18は、カウンターKに0を代入する。
(ステップS903)演算部18は、第一微粒子センサ2が、微粒子を検出したか否かを判断する。具体的には、微粒子を検出したことを示すパルスを第一微粒子センサ2から受け付けた場合、微粒子を検出したと判断し、受け付けていない場合、検出していないと判断する。微粒子を検出した場合、ステップS904に進み、検出していない場合、ステップS905に進む。
(ステップS904)演算部18は、カウンターKを1インクリメントする。
(ステップS905)演算部18は、ステップS902において、カウンターKに0を代入してから、時間差であるm秒が経過したか否かを判断する。経過した場合、ステップS906に進み、経過していない場合、ステップS903に戻る。
(ステップS906)演算部18は、カウンターLに1を代入する。
(ステップS907)演算部18は、第一微粒子センサ2が、微粒子を検出したか否かを判断する。微粒子を検出した場合、ステップS908に進み、検出していない場合、ステップS909に進む。
(ステップS908)演算部18は、カウンターKを1インクリメントする。
(ステップS909)演算部18は、第二微粒子センサ5が、微粒子を検出したか否かを判断する。微粒子を検出した場合、ステップS910に進み、検出していない場合、ステップS911に進む。
(ステップS910)演算部18は、カウンターLを1インクリメントする。
(ステップS911)演算部18は、最後にカウンターKに0を代入してから、所定の時間tが経過したか否かを判断する。経過した場合、ステップS912に進み、経過していない場合、ステップS914に進む。
(ステップS912)演算部18は、カウンターKの値をメモリ等の記憶媒体(図示せず)に蓄積する。なお、すでに値が蓄積されている場合、この値を上書きするようにしても良い。
(ステップS913)演算部18は、カウンターKに1を代入する。そして、ステップS907に戻る。
(ステップS914)演算部18は、最後にカウンターLに0を代入してから、所定の時間tが経過したか否かを判断する。経過した場合、ステップS915に進み、経過していない場合、ステップS907に戻る。
(ステップS915)演算部18は、ステップS912において記憶媒体に蓄積されたカウンターKの値のうちの最新の値と、カウンターLの値とから分離比Sを求める。この処理は、図2において説明したステップS209の処理と同様である。
(ステップS916)演算出力部9は、演算部18が演算により求めた分離比Sを出力する。演算出力部9は、分離比Sをディスプレイ(図示せず)等に表示する。そして、ステップS906に戻る。
なお、図9のフローチャートにおいて、ステップS907およびステップS908と、ステップS909およびステップS910との処理順番を入れ替えても良い。
また、図9のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
なお、時間差を補正するために、図9に示したフローチャートのような方法ではなく、第一微粒子センサ2に出力のタイミングを遅らせることができるディレー回路を組み込むようにし、第二微粒子センサ5がデータを取得するタイミングと同じタイミングで、第一微粒子センサ2が出力を取得できるように、第一微粒子センサ2の出力を行うタイミングを調整できるようにしてもよい。このようにすることで、図2に示したフローチャートと同様の方法により、微粒子を検出する処理を行わせることが可能となる。なお、ディレー回路は、ハードウェア的なものであっても良いし、ソフトウェア的なものであってもよい。なお、ディレー回路の構成については公知技術であるのでここでは説明を省略する。
また、第一微粒子センサ2から排出された流体が、第二微粒子センサ5に送り込まれるまでの時間であるm秒が、無視可能な場合には、上記実施の形態1において、図2に示したフローチャートと同様の処理により、微粒子検出装置101を動作させるようにしても良い。
以下、本実施の形態における微粒子検出装置の具体的な動作について説明する。微粒子検出装置の概念図は図3と同様である。ただし、ここでは、微粒子検出装置100の代わりに微粒子検出装置101を、また、演算部8の代わりに演算部18を用いるものとする。なお、ここでは、流体が気体、特に空気である場合を例に挙げて説明するが、上記実施の形態1の具体例2と同様に、流体として液体を用いても良い。
まず、吸引装置7による吸引を開始させると、部品31と部品32とのはめ込み作業を行っている箇所近傍の空気の、採取管1による吸入が開始される。そして、第一微粒子センサ2により、採取管1が吸入した空気中の微粒子の検出が行われる。第一微粒子センサ2は、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部18に対して出力する。
第一微粒子センサ2により微粒子が検出された空気は、分離部3により所望の微粒子が分離された後、第二微粒子センサ5に送り込まれ、第二微粒子センサ5によってこの空気中の微粒子の検出が行われる。具体的には、第一微粒子センサ2が微粒子のカウントを開始してから、上記のm秒遅れで第二微粒子センサ5によるカウントが開始される。そして、第二微粒子センサ5は、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部18に対して出力する。
演算部18は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ微粒子のカウントを開始してから、すなわちそれぞれのカウンターをリセットしてから、所定の時間tが経過するまでの間に、第一微粒子センサ2および第二微粒子センサ5からそれぞれ送信されるパルス信号の数を、それぞれカウントする。これらのカウント値が、第一微粒子センサ2が検出した微粒子の量と、第二微粒子センサ5が検出した微粒子の量となる。ここでは、第一微粒子センサ2が検出した微粒子の量は、微粒子を分離する前の空気中の微粒子の量Niに相当し、第二微粒子センサ5が検出した微粒子の量は、微粒子を分離した後の空気中の微粒子の量Ntに相当する。この時間tの値はどのような値であっても良い。例えば、時間tを、1つの部品の組み立てが開始されてから、次の部品の組み立てが開始されるまでの時間等に設定するようにしてもよい。このようにすれば、部品を1つ組み立てる間に発生する微粒子の量に関する値を、各部品について比較することができる。また、例えば、最終的に演算により求めた分離比等を時間経過に沿ったグラフ等で出力する場合、時間tを数秒に設定してもよい。
演算部8は、第二微粒子センサ5による微粒子の検出の開始から、所定の時間tが経過した時点で、所定の時間t内における第一微粒子センサ2が検出した微粒子量をNiの値とし、第二微粒子センサ5が検出した微粒子量をNtの値とし、これらの値から、分離比Sを求める。そして、この分離比を演算出力部9がディスプレイ19に出力する。その後、同様の処理が、順次繰り返して実行される。
ユーザは、この出力を見ることで、部品の組み立てが行われている箇所の微粒子の発生状況を、リアルタイムに、連続的にモニタすることができる。
また、第一微粒子センサ2と第二微粒子センサ5とが順次連続して微粒子を検出する処理を行うことができ、所望の微粒子を検出する処理や、空気中の微粒子の量に関する値を取得する処理を連続的に行うことができる。
また、第一微粒子センサ2と第二微粒子センサ5とが微粒子を検出した直後に、微粒子の量に関する値を出力することができ、リアルタイムな処理を行うことができる。
また、分離部3、ここではフィルタ、を変更することで、分離部3で分離できる微粒子の大きさや重さ等を容易に変更することができ、発生状況を把握したい微粒子の大きさや重さ等を変更することが可能となる。
また、採取管等の配管を分岐構造等にする必要がなく、空気を均等に分割したりするための設計を不要として、構造を簡単にすることができる。また、配管に分岐構造等が不要となるため、装置全体の小型化を図ることが可能となる。
(実施の形態3)
本実施の形態に係る微粒子検出装置は、上記実施の形態2に係る微粒子検出装置において、分離部として、サイクロンを用いるようにしたものである。
本実施の形態に係る微粒子検出装置は、上記実施の形態2に係る微粒子検出装置において、分離部として、サイクロンを用いるようにしたものである。
図10は、本実施の形態における微粒子検出装置の模式図である。
微粒子検出装置102は、採取管10、第一微粒子センサ2、配管11、サイクロン90、配管12、第二微粒子センサ5、吸引装置7、演算部28、および演算出力部9、回収箱14を具備する。採取管10、第一微粒子センサ2、配管11、配管12、第二微粒子センサ5、吸引装置7、および演算出力部9の構成については、上記実施の形態2と同様であるので、詳細な説明は省略する。ただし、ここでは、配管11は、第一微粒子センサ2の排出する流体をサイクロン90に送る。また、第二微粒子センサ5には、サイクロン90の下部から、サイクロン90により分離されて排出される微粒子が送りこまれ、第二微粒子センサ5は、サイクロン90により分離された微粒子の数を計数する。また、配管12は、サイクロン90の上部から排出される、サイクロン90により微粒子を分離した後の流体を吸引装置7に送る。
ただし、サイクロン90を使用する場合は、流体の比重よりも分離する微粒子の比重が大きいことが条件となる。たとえば、流体が空気の場合は、ほぼすべての種類の微粒子が分離可能である。しかし、流体が水(比重=1)の場合は、金属等の微粒子(比重>1)なら分離可能だが、樹脂等の微粒子(比重≦1)は分離不能である。
ただし、サイクロン90を使用する場合は、流体の比重よりも分離する微粒子の比重が大きいことが条件となる。たとえば、流体が空気の場合は、ほぼすべての種類の微粒子が分離可能である。しかし、流体が水(比重=1)の場合は、金属等の微粒子(比重>1)なら分離可能だが、樹脂等の微粒子(比重≦1)は分離不能である。
サイクロン90は、任意の環境から採取された流体中の微粒子を分離する。具体的には、サイクロン90は、配管11から送り込まれる流体中の微粒子のうちの、所望のサイズや重さの微粒子を分離する。ここで述べるサイクロンとは、遠心分離の原理を利用して、微粒子を、大きさや重さ等に基づいて、流体から分離するものであり、いわゆるハイドロサイクロンとも呼ばれるものも含まれる。具体的には、サイクロン90は、通常、開口した先端が下方となるように配置された円錐形状の部材である円錐部材94を有しており、微粒子を含む流体が、この円錐部材94の直径が大きな部分、ここでは上部に流れこみ、これにより生じた回転流によって、サイズが大きく高密度の微粒子が、円錐部材94の内壁にぶつかりながら回転運動をしながら下降して、流体から分離されて円錐部材94の先端の開口部から排出される。また、微粒子が分離された流体は、円錐部材94の上部に設けられた排出部から排出される。サイクロン90の微粒子を分離する性能、言い換えれば、どのような所望の微粒子を分離するかという仕様は、主として円錐部材94の径や、高さ等を変更することにより、変更可能である。なお、サイクロン90は、このような原理により所望の微粒子を分離可能な構造を有していれば、どのような構造のものを用いてもよい。このサイクロン90は、吸入部91、排出部92、微粒子排出部93を具備する。吸入部91は、任意の環境から採取された流体を吸入する。吸入部91は、ここでは、円錐部材90の上部の側面に設けられている。排出部92は、微粒子が分離された流体を排出する。排出部92は、円錐部材90の上方に設けられている。微粒子排出部93は、分離された微粒子を排出する。微粒子排出部93は、円錐部材94の下部に設けられており、円錐部材90の先端の開口部を含む。なお、サイクロン90の構成については、公知技術であるので、詳細な説明は省略する。ここでは、第一微粒子センサ2は、サイクロン90の吸入部91に設けられ、第二微粒子センサ5は、サイクロン90の微粒子排出部93に設けられている。なお、ここで述べる「設けられている」とは、第一微粒子センサ2および第二微粒子センサ5が、それぞれ吸入部91および微粒子排出部93に接するように設けられていることも、それぞれ吸入部91および微粒子排出部93の一部を構成していることも、それぞれ吸入部91および微粒子排出部93に取り付けられた配管に設置されていることも含む概念である。
回収箱14は、サイクロン90から排出される微粒子を回収するための箱であり、サイクロン90の微粒子排出部93に取り付けられている。第一微粒子センサ2は、少なくともこの回収箱14よりも、サイクロン90側に取り付けられており、第一微粒子センサ2により検出された微粒子が回収箱14に回収される。回収箱14は、サイクロン90が正常に動作するように、サイクロン90に取り付けた状態で外部に対して閉じた状態が保てる構造を有している。回収箱14は、サイクロン90に取り付けた状態で密封が保たれる構造となっていることが好ましい。回収箱14はサイクロン90に対して着脱可能であることが好ましい。回収箱14は回収された微粒子を容易に取り出すことができるからである。回収箱14とサイクロン90との間には、配管等を有していても良い。
演算部28は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ検出した微粒子に応じて出力する信号に基づいて、任意の環境から採取された流体中の微粒子の量に関する値を演算する。演算部28の基本的な構成は、演算部18の構成と同様である。ただし、ここでは、上記実施の形態2とは異なり、第二微粒子センサ5が出力する信号から得られる微粒子の量を、流体中から分離した所望の微粒子の量として用いる。すなわち、本実施の形態においては、第二微粒子センサ5が出力する信号から得られる微粒子の量は、上記実施の形態2におけるNi−Ntの値として用いられる。したがって、例えば、上述した分離比Sは、第一微粒子センサ2が出力する信号から得られる微粒子の量から、第二微粒子センサ5が出力する信号から得られる微粒子の量を減算して得られる微粒子の量と、第二微粒子センサ5が出力する信号から得られる微粒子の量との比として求めることができる。なお、演算部28は、この分離比S以外の「流体中の微粒子の量に関する値」を求めるようにしても良いことは、上記実施の形態2と同様である。なお、この微粒子検出装置102においては、採取管10が吸入した流体が、第一微粒子センサ2に達する時間と、第一微粒子センサ2が排出した流体から分離された微粒子が第二微粒子センサ5に達する時間との間に、時間差が生じるため、演算部28においては、この時間差を補正して、同じ流体中の微粒子を検出して得られた信号同士を演算処理できるようにする、あるいはこの時間差が補正されるように、第二微粒子センサが微粒子の検出を開始する時間を、上記の時間差分だけ遅らせることが、正確な微粒子の量に関する値を得る上で好ましい。
本実施の形態における微粒子検出装置102の動作については、図9と同様であるので、ここでは説明を省略する。ただし、ここでは、第一微粒子センサ2が流体から微粒子を検出してから、同じ流体からサイクロン90により微粒子が分離されて微粒子排出部93から排出されるまでの時間差をm秒とする。また、ステップS915において演算部18が分離比を求める処理は、演算部28が分離比を求める処理に置き換えられる。また、カウンターLの値は、サイクロン90により分離された流体中の微粒子の量、すなわち微粒子量Ni−Ntとなり、カウンターKの値がサイクロン90による微粒子の分離が行われていない流体中の微粒子量Niとなる。このため、演算部28は、上述した分離比Sとして、Nt:(Ni−Nt)=(K−L):Lを求める。
なお、第一微粒子センサ2が流体から微粒子を検出してから、同じ流体からサイクロン90により微粒子が分離されて微粒子排出部93から排出されるまでの時間差であるm秒が、無視可能な場合には、上記実施の形態1において、図2に示したフローチャートと同様の処理により、微粒子検出装置102を動作させるようにしても良い。
以下、本実施の形態における微粒子検出装置の具体的な動作について説明する。微粒子検出装置の概念図は図3と同様である。ただし、ここでは、微粒子検出装置100の代わりに微粒子検出装置102を、また、演算部8の代わりに演算部28を用いるものとする。なお、ここでは、流体が気体、特に空気である場合を例に挙げて説明するが、上記実施の形態1の具体例2と同様に、流体として液体を用いても良い。
まず、吸引装置7による吸引を開始させると、サイクロン90の排出部92からサイクロン90内の空気が吸引装置7により吸引され、サイクロン90内に吸入部91から空気が吸い込まれ、吸い込まれた空気からの微粒子の分離が開始される。また、部品31と部品32とのはめ込み作業を行っている箇所近傍の空気の、採取管1による吸入が開始される。そして、第一微粒子センサ2により、採取管10が吸入した空気中の微粒子の検出が行われる。第一微粒子センサ2は、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部18に対して出力する。
第一微粒子センサ2により微粒子が検出された空気は、吸入部91からサイクロン90内に送り込まれ、サイクロン90により所望の微粒子が分離された後、排出部92から吸引装置7に対して排出される。サイクロン90により分離された微粒子は、微粒子排出部93から排出され、第二微粒子センサ5に送り込まれる。例えば、空気中に同程度の大きさの樹脂の微粒子と金属の微粒子が含まれている場合、金属の微粒子だけを、微粒子排出部93から排出することが可能となる。そして、第二微粒子センサ5により、微粒子排出部93から排出される微粒子の検出が行われる。具体的には、第一微粒子センサ2が微粒子のカウントを開始してから、上記のm秒遅れで第二微粒子センサ5によるカウントが開始される。そして、第二微粒子センサ5は、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部28に対して出力する。
演算部28は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ微粒子のカウントを開始してから、すなわちそれぞれのカウンターをリセットしてから、所定の時間tが経過するまでの間に、第一微粒子センサ2および第二微粒子センサ5からそれぞれ送信されるパルス信号の数を、それぞれカウントする。これらのカウント値が、第一微粒子センサ2が検出した微粒子量と、第二微粒子センサ5が検出した微粒子量となる。ここでは、第一微粒子センサ2が検出した微粒子量は、微粒子を分離する前の空気中の微粒子の量Niに相当し、第二微粒子センサ5が検出した微粒子の量は、サイクロン90で分離した空気中の微粒子の量(Ni−Nt)に相当する。この時間tの値はどのような値であっても良い。例えば、時間tを、1つの部品の組み立てが開始されてから、次の部品の組み立てが開始されるまでの時間等に設定するようにしてもよい。このようにすれば、部品を1つ組み立てる間に発生する微粒子の量に関する値を、各部品について比較することができる。また、例えば、最終的に演算により求めた分離比等を時間経過に沿ったグラフ等で出力する場合、時間tを数秒に設定してもよい。
演算部28は、第二微粒子センサ5による微粒子の検出の開始から、所定の時間tが経過した時点で、所定の時間t内における第一微粒子センサ2が検出した微粒子量をNiの値として、第二微粒子センサ5が検出した微粒子量を(Ni−Nt)の値として、分離比S、すなわちNt:(Ni−Nt)を求める。そして、この分離比Sを演算出力部9がディスプレイ19に出力する。その後、同様の処理が、順次繰り返して実行される。
ユーザは、この出力を見ることで、部品の組み立てが行われている箇所の微粒子の発生状況を、リアルタイムに、連続的にモニタすることができる。
以上、本実施の形態によれば、第一微粒子センサ2が微粒子を検出した流体から、第二微粒子センサ5においては、分離部3により所望の微粒子を分離後に、微粒子を検出するようにしたので、実質的に同じ流体について、分離部3による微粒子の分離前後の微粒子の量を検出することができ、採取する時間による微粒子の量のばらつきや、採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができ、精度良く流体中の微粒子の量に関する値、例えば分離比を得ることができる。
また、第一微粒子センサ2と第二微粒子センサ5とがそれぞれ連続して微粒子を検出する処理を行うことができ、所望の微粒子を検出する処理や、流体中の微粒子の量に関する値を取得する処理を連続的に行うことができる。
また、第一微粒子センサ2と第二微粒子センサ5とが、採取した流体から微粒子を検出した直後に、微粒子の量に関する値を出力することができ、リアルタイムな処理を行うことができる。
また、サイクロン90の仕様を変更することで、サイクロン90で分離できる微粒子の大きさや重さ等を変更することができ、発生状況を把握したい微粒子の大きさや重さ等を変更することが可能となる。
また、採取管等の配管を分岐構造等にする必要がなく、流体を均等に分割したりするための設計を不要として、構造を簡単にすることができる。また、配管に分岐構造等が不要となるため、装置全体の小型化を図ることが可能となる。
また、サイクロン90を用いることにより、上述した実施の形態とは異なり、流体中から分離した微粒子の数を計数したり、分離した微粒子を容易に取り出すことが可能となる。これにより、例えば、流体中から分離した微粒子を、目視等により確認することが可能となる。
なお、本実施の形態においては、サイクロン90の吸入部91と、微粒子排出部93とに第一微粒子センサ2および第二微粒子センサ5を設けるようにした。しかしながら、本発明においては、第一微粒子センサ2および第二微粒子センサ5を、吸入部91、排出部92、微粒子排出部93のうちの異なるいずれかに個別に設けるようにしてもよい。例えば、第一微粒子センサ2を吸入部91に、第二微粒子センサ5を排出部92に設けるようにしても良い。この場合、演算部28においては、第一微粒子センサ2が検出した微粒子量を、微粒子を分離する前の流体中の微粒子の量Niとして用い、第二微粒子センサ5が検出した微粒子の量は、微粒子を分離した後の流体中の微粒子の量Ntとして用いて、分離比を算出するようにする。また、例えば、第一微粒子センサ2を排出部92に、第二微粒子センサ5を微粒子排出部93に設けるようにしても良い。この場合、演算部28においては、第一微粒子センサ2が検出した微粒子量を、微粒子を分離した後の流体中の微粒子の量Ntとして用い、第二微粒子センサ5が検出した微粒子の量は、流体中から分離した微粒子の量(Ni−Nt)として用いて、分離比を算出するようにすればよい。
ただし、通常、サイクロンにおいては、吸入部や排出部等の通常の流体を吸排出するための開口部の大きさは、大量の流体が通過するために大口径であるのに対し、微粒子排出部の開口部の大きさは、分離された微粒子が落下するだけであり、大量の流体が通過しないため、吸入部や排出部等の通常の流体を吸排出するための開口部の大きさよりも小さい。本実施の形態において説明したサイクロンにおいては、例えば、吸入部91や排出部92の開口部の直径がおよそ40mmから60mmであったとすると、微粒子排出部93の直径は、約10mm程度とすることができる。このため、微粒子排出部93に設ける第二微粒子センサ5の微粒子の感知範囲は狭くてよく、このため、第二微粒子センサ5としては、比較的に安価である小型なセンサを使用することが可能となる。これに対し、吸入部91や排出部92に微粒子センサを用いる場合、精度の高い測定を行うとすると、感知範囲の広い大型のセンサが必要となり、コストが高くなる。従って、サイクロン90に対して設置する微粒子センサのうちの1つは、微粒子排出部93に設けることが好ましい。また、微粒子排出部93には、吸入部91や排出部92と比べて、ほこり等の微粒子の付着が少ないことから、この微粒子排出部93に第二微粒子センサ5を設けることで、メンテナンスの手間を削減することができる。
また、上記実施の形態において、サイクロン90の排出部92に、第一微粒子センサ二と同様の第三微粒子センサをさらに設けるようにしても良い。そして、演算部28においては、第一微粒子センサ2、第二微粒子センサ5、および第三微粒子センサからそれぞれ得られる微粒子の量の値を適宜用いて、分離比等の「流体中の微粒子の量に関する値」を演算により求めるようにしても良い。
(実施の形態4)
本実施の形態に係る微粒子検出装置は、上記実施の形態3に係る微粒子検出装置において、直列に配列した2つのサイクロンを用いるようにしたものである。
本実施の形態に係る微粒子検出装置は、上記実施の形態3に係る微粒子検出装置において、直列に配列した2つのサイクロンを用いるようにしたものである。
図11は、本実施の形態における微粒子検出装置の模式図である。
微粒子検出装置102は、採取管10、第一サイクロン190、回収箱14、配管13、第二サイクロン290、回収箱15、配管12、吸引装置7、第一微粒子センサ2、第二微粒子センサ5、演算部38、および演算出力部9を具備する。採取管10、第一微粒子センサ2、回収箱15、第二微粒子センサ5、配管12、吸引装置7、および演算出力部9の構成については、上記実施の形態3と同様であるので、詳細な説明は省略する。ただし、第一微粒子センサ2には、第一サイクロン190の下部から、第一サイクロン190により分離されて排出される微粒子が送られ、第一微粒子センサ2は、第一サイクロン190により分離された微粒子の数を計数する。また、第二微粒子センサ5には、第二サイクロン290の下部から、第二サイクロン290により分離されて排出される微粒子が送られ、第二微粒子センサ5は、第二サイクロン290により分離された微粒子の数を計数する。
第一サイクロン190は、流体中の微粒子を分離する。具体的には、第一サイクロン190は、採取管10から送り込まれる流体中の微粒子のうちの、所望の大きさや重さの微粒子を分離する。第一サイクロン190は、第一吸入部191、第一排出部192、第一微粒子排出部193を具備する。第一サイクロン190の構成は、上述したサイクロン90の構成と同様であるので、ここでは説明は省略する。また、第一吸入部191、第一排出部192、第一微粒子排出部193の構成は、それぞれ、吸入部91、排出部92、微粒子排出部93と同様である。
配管13は、第一サイクロン190の第一排出部192から排出された流体を第二サイクロン290に送り込むための管であり、第一サイクロン190の第一排出部192と第二サイクロン290の第二吸入部291とを接続する。配管13の材質やサイズ等は問わない。
第二サイクロン290は、流体中の微粒子を分離する。具体的には、第二サイクロン290は、配管13から送り込まれる流体中の微粒子を分離する。第二サイクロン290は、第二吸入部291、第二排出部292、第二微粒子排出部293を具備する。この第二サイクロン290は、第一サイクロン190よりも分離能力が優れているよう設計されている。ここで述べる「分離能力が優れている」とは、流体中から、より小さく、より軽いごみを分離できることを指す。例えば、第二サイクロン290の円錐部材294の径を、第一サイクロン190の円錐部材194の径よりも小さくなるように設計することで、分離能力を向上させることができる。第二サイクロン290が、どの程度分離能力が優れているかは問わない。具体的には、この第二サイクロン290としては、第一微粒子センサ2や第二微粒子センサ5で検出可能な微粒子のほとんど全てを分離できる分離能力を備えたものを用いることが好ましい。このような第二サイクロン290を用いることで、本実施の形態においては、この第二サイクロン290で分離した微粒子を、第一サイクロン190により所望の微粒子を分離した後の流体中に含まれる全ての微粒子とすることが可能となる。なお、サイクロンにおいて分離能力を変更する方法については、公知技術であるので説明は省略する。第二サイクロン290の構成は、これらの点を除けば、第一サイクロン190と同様の構造を有するため、詳細な説明は省略する。第二吸入部291、第二排出部292、第二微粒子排出部293の構成は、それぞれ、吸入部91、排出部92、微粒子排出部93と同様である。なお、ここでは、第二サイクロン290は、配管13により第一サイクロン190と接続されることにより、いわゆるタンデム構造となっている。
回収箱15は、第二微粒子センサ5の第二微粒子排出部293に取り付けられている点を除けば、回収箱14と同様の構造を有しているので、詳細な説明は省略する。
演算部38は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ検出した微粒子に応じて出力する信号に基づいて、任意の環境から採取された流体中の微粒子の量に関する値を演算する。演算部38の基本的な構成は、演算部38の構成と同様である。ただし、ここでは、上記実施の形態3とは異なり、第一微粒子センサ2が出力する信号から得られる微粒子の量を、流体中から分離した所望の微粒子の量とし、第二微粒子センサ5が出力する信号から得られる微粒子の量を、所望の微粒子を分離した後に流体中に存在している微粒子の量とみなして用いる。すなわち、本実施の形態においては、第一微粒子センサ2が出力する信号から得られる微粒子の量は、上記実施の形態3におけるNi−Ntの値として用いられる。また、本実施の形態においては、第二微粒子センサ5が出力する信号から得られる微粒子の量は、上記実施の形態3におけるNtの値として用いられる。したがって、例えば、上述した分離比Sは、第二微粒子センサ5が出力する信号から得られる微粒子の量と、第一微粒子センサ2が出力する信号から得られる微粒子の量との比として求めることができる。なお、演算部38は、この分離比S以外の「流体中の微粒子の量に関する値」を求めるようにしても良いことは、上記実施の形態3と同様である。なお、この微粒子検出装置102においては、第一サイクロン190から排出後に、流体が第二サイクロン290に送り込まれるため、第一サイクロン190により流体中から微粒子を分離した時間と、この微粒子を分離した流体中から第二サイクロン290により微粒子を分離した時間との間には、時間差が生じるため、演算部38においては、この時間差を補正して、同じ流体中の微粒子を検出して得られた信号同士を演算処理できるようにする、あるいはこの時間差が補正されるように、第二微粒子センサ5が微粒子の検出を開始する時間を、上記の時間差分だけ遅らせることが、正確な微粒子の量に関する値を得る上で好ましい。
本実施の形態における微粒子検出装置103の動作については、図9と同様であるので、ここでは説明を省略する。ただし、ここでは、第一微粒子センサ2が第一サイクロン190により流体から分離された微粒子を検出してから、同じ流体から第二サイクロン290が分離した微粒子を第二微粒子センサ5が検出するまでの時間差をm秒とする。また、ステップS915において演算部18が分離比Sを求める処理は、演算部38が分離比Sを求める処理に置き換えられる。また、カウンターKの値を、第一サイクロン190により分離された流体中の微粒子の量、すなわち微粒子量Ni−Ntとし、カウンターLの値を、第二サイクロン290による微粒子の分離が行われていない流体中の微粒子量Niとする。そして、演算部38は、上述した分離比Sとして、Nt:(Ni−Nt)=L:Kを求める。
なお、第一微粒子センサ2が第一サイクロン190により流体から分離された微粒子を検出してから、同じ流体から第二サイクロン290が分離した微粒子を第二微粒子センサ5が検出するまでの時間差であるm秒が、無視可能な場合には、上記実施の形態1において、図2に示したフローチャートと同様の処理により、微粒子検出装置103を動作させるようにしても良い。
以下、本実施の形態における微粒子検出装置の具体的な動作について説明する。微粒子検出装置の概念図は図3と同様である。ただし、ここでは、微粒子検出装置100の代わりに微粒子検出装置103を、また、演算部8の代わりに演算部38を用いるものとする。また、ここでは、流体が気体、特に空気である場合を例に挙げて説明するが、上記実施の形態1の具体例2と同様に、流体として液体を用いても良い。
まず、吸引装置7による吸引を開始させると、第二サイクロン290の第二排出部292から第二サイクロン290内の空気が吸引装置7により吸引され、第二サイクロン290内に第二吸入部291から空気が吸い込まれ、吸い込まれた空気からの微粒子の分離が開始される。また、同様に、第一サイクロン190の第一排出部192から第一サイクロン190内の空気が、第二サイクロン290により吸引され、第一サイクロン190内にも第一吸入部191から空気が吸い込まれ、吸い込まれた空気からの微粒子の分離が開始される。また、部品31と部品32とのはめ込み作業を行っている箇所近傍の空気の、採取管10による吸入が開始される。
採取管10により吸入された空気は、第一吸入部191から第一サイクロン190内に送り込まれ、第一サイクロン190により所望の微粒子が分離された後、第一排出部192から排出される。第一サイクロン190により分離された微粒子は、第一微粒子排出部193から排出され、第一微粒子センサ2に送り込まれる。そして、第一微粒子センサ2により、第一微粒子排出部193から排出される微粒子の検出が行われる。そして、第一微粒子センサ2は、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部38に対して出力する。
第一サイクロン190により排出された空気は、第二吸入部291から第2サイクロン290内に送り込まれ、第一サイクロン190により分離できなかった微粒子が、第二サイクロン290により分離される。そして、微粒子が分離された空気が第二排出部292から吸引装置7に対して排出される。第二サイクロン290により分離された微粒子は、第二微粒子排出部293から排出され、第二微粒子センサ5に送り込まれる。そして、第二微粒子センサ5により、第二微粒子排出部293から排出される微粒子の検出が行われる。具体的には、第一微粒子センサ2が微粒子のカウントを開始してから、上記のm秒遅れで第二微粒子センサ5によるカウントが開始される。そして、第二微粒子センサ5は、微粒子を検出するごとに、微粒子が検出されたことを示すパルス信号を、演算部38に対して出力する。
演算部38は、第一微粒子センサ2および第二微粒子センサ5が、それぞれ微粒子のカウントを開始してから、すなわちそれぞれのカウンターをリセットしてから、所定の時間tが経過するまでの間に、第一微粒子センサ2および第二微粒子センサ5からそれぞれ送信されるパルス信号の数を、それぞれカウントする。これらのカウント値が、第一微粒子センサ2が検出した微粒子量と、第二微粒子センサ5が検出した微粒子量となる。ここでは、第一微粒子センサ2が検出した微粒子量は、空気中から分離したい所望の微粒子の量(Ni−Nt)に相当し、第二微粒子センサ5が検出した微粒子の量は、所望の微粒子を分離した後の空気中の微粒子の量Ntに相当する。この時間tの値はどのような値であっても良い。例えば、時間tを、1つの部品の組み立てが開始されてから、次の部品の組み立てが開始されるまでの時間等に設定するようにしてもよい。このようにすれば、部品を1つ組み立てる間に発生する微粒子の量に関する値を、各部品について比較することができる。また、例えば、最終的に演算により求めた分離比等を時間経過に沿ったグラフ等で出力する場合、時間tを数秒に設定してもよい。
演算部38は、第二微粒子センサ5による微粒子の検出の開始から、所定の時間tが経過した時点で、所定の時間t内における第一微粒子センサ2が検出した微粒子量を(Ni−Nt)の値として、第二微粒子センサ5が検出した微粒子量をNtの値として、分離比S、すなわちNt:(Ni−Nt)を求める。そして、この分離比Sを演算出力部9がディスプレイ19に出力する。その後、同様の処理が、順次繰り返して実行される。
ユーザは、この出力を見ることで、部品の組み立てが行われている箇所の微粒子の発生状況を、リアルタイムに、連続的にモニタすることができる。
以上、本実施の形態によれば、第一サイクロン190により所望の微粒子を分離した流体から、第一サイクロン190よりも分離能力に優れた第二サイクロン290により微粒子を分離し、それぞれ分離した微粒子の量を、第一微粒子センサ2および第二微粒子センサ5により検出するようにしたので、実質的に同じ流体について、第一サイクロン190により分離可能な流体中に含まれる所望の微粒子の量と、この所望の微粒子以外の第二サイクロン290により分離可能な微粒子の量とを検出することができ、採取する時間による微粒子の量のばらつきや、採取する位置による微粒子の量のばらつき等をなくして、精度良く所望の微粒子を検出することができ、精度良く流体中の微粒子の量に関する値、例えば分離比を得ることができる。
また、第一微粒子センサ2と第二微粒子センサ5とが順次連続して微粒子を検出する処理を行うことができ、所望の微粒子を検出する処理や、流体中の微粒子の量に関する値を取得する処理を連続的に行うことができる。
また、第一微粒子センサ2と第二微粒子センサ5とが微粒子を検出した直後に、微粒子の量に関する値を出力することができ、リアルタイムな処理を行うことができる。
また、第一サイクロン190や第二サイクロン290を変更することで、分離できる微粒子の大きさや重さ等を、所望の大きさや重さに変更することができ、発生状況を把握したい微粒子の大きさや重さ等を変更することが可能となる。
また、採取管等の配管を分岐構造等にする必要がなく、流体を均等に分割したりするための設計を不要として、構造を簡単にすることができる。また、配管に分岐構造等が不要となるため、装置全体の小型化を図ることが可能となる。
また、第一サイクロン190や第二サイクロン290を用いることにより、第一サイクロン190で所望の微粒子を分離した後の流体中の微粒子を、第二サイクロン290で分離するため、この微粒子も容易に取り出すことが可能となる。これにより、例えば、流体中から分離したそれぞれの微粒子を、目視等により確認することが可能となる。
また、本実施の形態においては、第一サイクロン190と第二サイクロン290とを用いて微粒子を分離するようにし、これらの第一微粒子排出部193と第二微粒子排出部293とから排出される微粒子を第一微粒子センサ2と第二微粒子センサ5とで検出するようにしたので、口径の小さい第一微粒子排出部193と第二微粒子排出部293とから排出される微粒子が検出できればよいことから、第一微粒子センサ2と第二微粒子センサ5としては、感知範囲の狭い安価な小型のセンサが利用可能であり、コストを削減することが可能となる。
なお、本実施の形態においては、サイクロンを3つ以上直列に繋げるようにし、それぞれの微粒子排出部に微粒子センサを設けるようにしてもよい。このとき、採取管から離れるに従って、分解能力が優れたサイクロンが配置されるようにすることが好ましい。このようにすることで、微粒子をさらに細かく、具体的には3種類以上、分類したり、カウントしたりすることが可能となり、より詳細な微粒子の発生状況を知ることが可能となる。
なお、本実施の形態においては、サイクロンを3つ以上直列に繋げるようにし、それぞれの微粒子排出部に微粒子センサを設けるようにしてもよい。このとき、採取管から離れるに従って、分解能力が優れたサイクロンが配置されるようにすることが好ましい。このようにすることで、微粒子をさらに細かく、具体的には3種類以上、分類したり、カウントしたりすることが可能となり、より詳細な微粒子の発生状況を知ることが可能となる。
(実施の形態5)
本実施の形態に係る微粒子検出装置は、上記実施の形態2に係る微粒子検出装置において、演算部18の演算結果を所定の値と比較することで、微粒子の発生状況の異常を検出できるようにしたものである。
本実施の形態に係る微粒子検出装置は、上記実施の形態2に係る微粒子検出装置において、演算部18の演算結果を所定の値と比較することで、微粒子の発生状況の異常を検出できるようにしたものである。
図12は、本実施の形態における微粒子検出装置の模式図である。
微粒子検出装置105は、採取管10、第一微粒子センサ2、配管11、分離部3、配管4、第二微粒子センサ5、配管12、吸引装置7、演算部18、演算出力部9、受付部110、上限値蓄積部111、下限値蓄積部112、比較部113、出力部114を具備する。採取管10、第一微粒子センサ2、配管11、分離部3、配管4、第二微粒子センサ5、配管12、吸引装置7、演算部18、および演算出力部9の構成については、上記実施の形態2と同様であるので、ここでは説明を省略する。なお、ここでは、演算部18が演算により求める「流体中の微粒子の量に関する値」が、分離比Sである場合を例に挙げて説明する。
微粒子検出装置105は、採取管10、第一微粒子センサ2、配管11、分離部3、配管4、第二微粒子センサ5、配管12、吸引装置7、演算部18、演算出力部9、受付部110、上限値蓄積部111、下限値蓄積部112、比較部113、出力部114を具備する。採取管10、第一微粒子センサ2、配管11、分離部3、配管4、第二微粒子センサ5、配管12、吸引装置7、演算部18、および演算出力部9の構成については、上記実施の形態2と同様であるので、ここでは説明を省略する。なお、ここでは、演算部18が演算により求める「流体中の微粒子の量に関する値」が、分離比Sである場合を例に挙げて説明する。
受付部110は、分離比Sの上限値と下限値とを受け付ける。ここで述べる上限値および下限値とは、具体的には、流体中の微粒子の分離比が、異常であるか否かを判断するための、演算部18が算出した分離比Sの上限値および下限値である。ここでは、例えば、分離比Sが上限値以上または下限値未満であれば、後述する比較部113により、微粒子の分離比が異常であると判断されるものとする。受付部110の受け付ける入力は、テンキーやキーボードやマウスやメニュー画面による入力等で、入力手段はどのようなものであってもよい。受付部110は、テンキーやキーボード等の入力手段のデバイスドライバーや、メニュー画面の制御ソフトウェア等で実現され得る。
上限値蓄積部111は、受付部110が受け付けた上限値をメモリ等の記憶媒体に蓄積する。上限値蓄積部111は、MPU及び揮発性または不揮発性のメモリ等により実現され、情報はこのメモリ等に蓄積される。ただし、上限値蓄積部111は、メモリ等の記憶媒体を有していなくても良い。この場合、他の記憶媒体等に上限値を蓄積すればよい。
下限値蓄積部112は、受付部110が受け付けた下限値をメモリ等の記憶媒体に蓄積する。下限値蓄積部112は、MPU及び揮発性または不揮発性のメモリ等により実現され、情報はこのメモリ等に蓄積される。ただし、下限値蓄積部112は、メモリ等の記憶媒体を有していなくても良い。この場合、他の記憶媒体等に下限値を蓄積すればよい。
比較部113は、演算部18が演算して得た値と、所定の値、ここでは、上記の上限値および下限値とを比較する。そしてその比較結果を出力する。演算部18が演算して得た値は、ここでは例として、分離比Sとする。比較部113は、上限値蓄積部111および下限値蓄積部112から上限値および下限値を取得する。比較部113の出力する比較結果のデータ構造は問わない。この比較結果は、例えば、演算部18が取得した分離比Sが、上限値未満で、下限値以上であるか否かを示す情報であっても良いし、演算部18が取得した分離比Sが上限値以上であるという情報、演算部18が取得した分離比Sが下限値未満であるという情報、分離比Sが上限値未満、下限値以上であるという情報のいずれか1つであってもよい。比較部113は、通常、MPUやメモリ等から実現され得る。比較部113の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
出力部114は、比較部113の取得した比較結果に基づいた出力を行う。具体的には、出力部114が行う出力は、比較結果に対応した出力である。出力部114は、比較部113の取得した比較結果をそのまま出力しても良いし、比較部113の取得した比較結果を、他の情報等に変換して出力しても良い。例えば、比較部113の取得した比較結果が、演算部18の取得した分離比Sが、上限値以上または下限値未満であることを示す情報である場合、「製造ラインに異常が発生しました。」という文字列をディスプレイ等に出力し、分離比Sが上限値未満かつ下限値以上である場合には「正常」という文字列を出力するようにしても良い。また、比較部113の取得した比較結果が、演算部18の取得した分離比Sが、上限値以上または下限値未満であることを示す情報である場合にのみ、パトライト(登録商標)等の表示灯を点滅させたり、ブザー等の警告音を鳴らしたりしても良い。また、分離比Sが上限値以上の場合にのみ「組み立ての微調整を行ってください。」という出力を行い、分離比Sが下限値未満の場合にのみ「組立装置を確認してください。」という出力を行うようにしても良い。また、出力部114は、比較結果をグラフに変換して出力しても良いし、比較結果を不揮発性の記憶媒体や、揮発性のメモリ媒体等に蓄積しても良い。また、「比較結果に基づいた出力を行う」とは、比較結果が、所定の値であった場合にのみ、出力を行い、所定の値でない場合には、出力を行わない場合も含む概念である。例えば、比較部113の取得した比較結果が、演算部18の取得した分離比Sが、下限値以上、上限値未満である場合にのみ、正常であることを示す出力を行い、それ以外の場合には、出力を行わないようにするようにしてもよい。出力部114の出力は、少なくとも、結果として、比較部113の取得した比較結果が、下限値以上、上限値未満であることを示すことができる出力であればよい。このような出力を行うことで、ユーザは、流体中の微粒子の分離比Sが異常であることを知ることができるからである。また、出力部114は、他の装置を制御するための信号を、比較結果に基づいて出力しても良い。例えば、比較部113の取得した比較結果が、演算部18の取得した分離比Sが、上限値以上または下限値未満であることを示す情報である場合にのみ、製造ラインを構成する一部または全ての装置に対して、動作を停止するための信号を出力するようにしても良い。出力部114は、ディスプレイやスピーカー、表示灯等の出力デバイスを含むと考えても含まないと考えても良い。出力部114は、出力デバイスのドライバーソフトまたは、出力デバイスのドライバーソフトと出力デバイス等で実現され得る。また、出力するためのデータを構成したり、情報を変換するためのMPUやメモリ等を備えていても良い。出力とは、ディスプレイへの表示、表示灯の点灯、プリンタへの印字、音出力、記憶媒体への蓄積、外部の装置への送信等を含む概念である。
つぎに、微粒子検出装置105の動作について説明する。
まず、上限値と下限値とを設定する処理について説明する。受付部110は、上限値を受け付けたか否かを判定する。上限値を受け付けた場合、上限値蓄積部111は、上限値をメモリ等に蓄積する。上限値を受け付けていない場合、受付部110は、下限値を受け付けたか否かを判定する。下限値を受け付けた場合、下限値蓄積部112は、下限値をメモリ等に蓄積する。そして、上限値を受け付けたか否かを判定する処理に戻る。また、下限値を受け付けていない場合も、上限値を受け付けたか否かを判定する処理に戻る。
なお、この処理は、電源オフや処理終了の割り込みにより処理は終了する。
まず、上限値と下限値とを設定する処理について説明する。受付部110は、上限値を受け付けたか否かを判定する。上限値を受け付けた場合、上限値蓄積部111は、上限値をメモリ等に蓄積する。上限値を受け付けていない場合、受付部110は、下限値を受け付けたか否かを判定する。下限値を受け付けた場合、下限値蓄積部112は、下限値をメモリ等に蓄積する。そして、上限値を受け付けたか否かを判定する処理に戻る。また、下限値を受け付けていない場合も、上限値を受け付けたか否かを判定する処理に戻る。
なお、この処理は、電源オフや処理終了の割り込みにより処理は終了する。
次に、微粒子検出装置105の、上限値と下限値とを設定した後の処理を、図13のフローチャートを用いて説明する。なお、図13において、図9と同一符号は同一または相当するステップを示している。ここでは、比較部113が、演算部18の取得した分離比Sが、上限値と下限値とで設定される範囲内であるか否かの情報を比較結果として取得する場合について説明する。また、ここでは分離比SをS=(Ni−Nt)/Ntとし、上限値の値をP、下限値の値をQとする。
(ステップS1301)比較部113は、上限値蓄積部111から上限値Pを取得する。
(ステップS1302)比較部113は、下限値蓄積部112から下限値Qを取得する。
(ステップS1303)比較部113は、分離比Sが上限値P未満であるか否かを判断する。上限値P未満であれば、ステップS1304に進む。また、上限値P以上であれば、ステップS1307に進む。
(ステップS1304)比較部113は、分離比Sが下限値Q以上であるか否かを判断する。下限値Q以上であれば、ステップS1305に進み、下限値Q未満であれば、ステップS1307に進む。
(ステップS1305)比較部113は、分離比Sが上限値Pと下限値Qとで設定される範囲内にあることを示す比較結果を取得する。
(ステップS1306)出力部114は、比較部113が取得した比較結果に基づいてた出力を行う。そして、ステップS906に戻る。
(ステップS1307)比較部113は、分離比Sが上限値Pと下限値Qとで設定される範囲内にないことを示す比較結果を取得する。そして、ステップS1306に進む。
なお、上記フローチャートにおいては、ステップS1307において、分離比Sが上限値Pと下限値Qとで設定される範囲内にないことを示す比較結果を取得するようにしたが、ステップS1303の判断の結果が、上限値P以上である場合には、上限値P以上であるという比較結果を取得し、ステップS1304の判断の結果が、下限値Q未満である場合には、下限値Q未満であるという比較結果を取得するようにし、ステップS1306において、これらの比較結果に基づいた出力を行うようにしても良い。
なお、図13のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
以下、本実施の形態における微粒子検出装置の具体的な動作について説明する。微粒子検出装置の概略図は図14に示す。ここでは、例として、微小な部品の自動組み立てラインにおける、組立装置33を用いた部品31と部品32とのはめ込み作業を行う箇所に、採取管1が設置されているものとする。そして、微粒子検出装置100は、はめ込み作業時に発生するバリ等の微粒子を吸引して集塵する集塵機を兼用にしているものとする。図14において、図8と同一符号は同一または相当する部分を示している。表示灯130は、ライトが回転しながら点灯するものであり、比較部113の取得した比較結果に基づいた出力を行うための出力デバイスである。また、ここでは、流体が気体、特に空気である場合を例に挙げて説明するが、上記実施の形態1の具体例2と同様に、流体として液体を用いても良い。
ここでは、例として、上記実施の形態1の具体例と同様に、微小な部品の自動組み立てラインにおける、組立装置33を用いた部品31と部品32とのはめ込み作業を行う箇所に、採取管1が設置されているものとする。そして、微粒子検出装置100は、はめ込み作業時に発生するバリ等の微粒子を吸引して集塵する集塵機を兼用にしているものとする。また、ここでは、分離比Sを、S=(Ni−Nt)/Ntとしており、分離比Sの値が大きくなるほど、発生量をモニタしたい所望の大きさや重さの微粒子、すなわち分離部3において分離できる微粒子の量が多いことを示すものとする。ここでは、分離部3において分離できる微粒子が、部品31と部品32とのはめ込み作業において部品31や部品32から剥がれるバリと同程度の大きさや重さを有する微粒子となるように、分離部3が設計されているものとする。従って、ここでは、部品31と部品32とのはめ込み作業において発生するバリの量が空気中に増加すると、バリの増加によりNiが増加するが、ほとんどのバリは分離されるためNtはあまり増加しない。つまり、ほぼ(Ni−Nt)のみが増加することとなり、分離比Sの値も増加する。逆に、バリの量が空気中に減少すると、分離比Sの値も減少することとなる。
まず、ユーザが、キーボード等を操作して、分離比Sの上限値Pと下限値Qとを入力すると、上限値Pと下限値Qとが、それぞれ上限値蓄積部111と下限値蓄積部112とに蓄積される。上限値は、例えば、正常に組み立てが行われている場合に発生するバリの量の最大値に基づいて設定される。また、下限値も、正常に組み立てが行われている場合に発生するバリの量の最小値に基づいて設定される。
つぎに、上記実施の形態2の具体例と同様に、部品のはめ込み作業が行われて、空気中の微粒子が、第一微粒子センサ2や第二微粒子センサ5により検出され、はめ込み作業が行われている箇所での空気中の分離比Sが演算により求められる。
つぎに、比較部113が、上限値蓄積部111と下限値蓄積部112とから上限値と下限値とを読み出し、これらの値と分離比Sとの比較を行う。
そして、比較部113による比較の結果が、分離比Sが上限値以上であるか、または、下限値未満であることを示すものである場合、出力部114は、表示灯130を点灯させる。また、分離比Sが上限値未満で、かつ下限値以上である場合には、出力部114は、表示灯130の点灯は行わない。
例えば、上記のような部品のはめ込み作業においては、部品31や部品32についているバリが、部品同士のはめ込み時に、組立装置33に挟まれたり、部品同士が押し当てられたりすること等により、剥がれて、微粒子として採取管10から吸引される。このようなバリに基づく微粒子は、正常にはめ込み作業が行われている限りは、ほぼ常時発生しており、その発生量は、ほぼ一定の範囲内に収まっている。従って、この一定の範囲内に微粒子の発生量が収まれば、正常なはめ込み作業が行われていると推定できる。この一定の範囲を、実験等や、統計結果等から求め、分離比Sの値の範囲として定義するための値が、上述した上限値蓄積部111および下限値蓄積部112に蓄積される上限値Pおよび下限値Qである。
しかしながら、組立装置33の動作のずれや部品同士の位置あわせ精度の劣化等が生じると、部品31や部品32が、組立装置33に把持される際に、把持される位置が、通常把持される位置と異なり、正常時には発生していなかった新たなバリの剥がれが生じたり、部品31と部品32との位置あわせの微少なずれにより、部品31と部品32とを嵌め合わせる際に無理な力が加わり、部品の一部が欠けて、バリと同程度の大きさの微粒子が生じたりして、バリに基づく微粒子や、バリと同程度の微粒子の発生量が増加する。この結果、分離部3により分離される微粒子の量が増加し、正常なはめ込み作業が行われている場合に得られる分離比Sの値の範囲よりも、分離比Sの値が大きくなってしまう。このため、分離比Sが上限値Pを以上となった場合には、出力部114が表示灯130を点灯させることで、ユーザに、はめ込み作業の異常が生じたことを知らせることが可能となる。
また、組立装置33の異常等により、部品のはめ込みの際の位置あわせが大きくずれて、はめ込みが行われなかったり、組立装置33が、部品31や部品32を把持しなかったりして部品のはめ込みが行われなかった場合等には、バリに基づく微粒子等の発生量が大きく減少する。この結果、分離部3により分離される微粒子の量が減少し、正常なはめ込み作業が行われている場合に得られる分離比Sの値の範囲よりも、分離比Sの値が小さくなってしまう。このため、分離比Sが下限値Q未満となった場合にも、出力部114が表示灯130を点灯させることで、ユーザに、はめ込み作業の異常が生じたことを知らせることが可能となる。
以上、本実施の形態によれば、上記実施の形態2と同様の効果を奏するとともに、演算部18の演算結果を比較部113により所定の値と比較し、その比較結果に基づいた出力を出力部114が行うようにしたので、分離部3により分離される所望の微粒子の量に関する値が正常な範囲内にあるか否かを出力することが可能となる。この結果、例えば、ユーザは、流体を採取している箇所における微粒子の発生状況が正常であるか否かを知ることが可能となる。具体的には、製造ラインの製造装置等が微粒子を発生させている場合、この製造装置の近傍の流体中の微粒子の発生状況が正常でないことを知ることで、ユーザは、製造装置の異常を知ることが可能となる。
また、本実施の形態においては、分離比Sが上限値P以上である場合には、出力部114が、ディスプレイ等に、「微粒子が増加しています。製造装置にずれが生じた可能性があります。」等の、所望の微粒子の発生状況や、異常発生の原因等を示す警告を表示し、出力部114が、分離比Sが下限値Q未満である場合には、出力部114が、ディスプレイ等に、「微粒子の発生が低下しています。はめ込みが正常に行われていない可能性があります。」等の、所望の微粒子の発生状況や、異常発生の原因等を示す警告を表示するようにしてもよい。このような出力内容等は、予め、出力部114が、比較部113の比較結果と対応付けて蓄積しておくようにすればよい。
また、本実施の形態においては、上限値と下限値とのみを設定するようにしたが、これら以外の閾値をさらに1以上設定するようにしても良い。そして、比較部113が取得するこれらの上限値や下限値や閾値と分離比Sとの比較結果に応じた出力、例えば、「重度の警告」、「軽度の警告」、「注意」等の表示等、を出力部114が行うようにしても良い。
なお、本実施の形態においては、分離比Sの上限値のみ、あるいは下限値のみを設定するようにしても良いことはいうまでもない。
また、本実施の形態においては、分離比Sを、その上限値や下限値と比較するようにしたが、本発明においては、分離比S以外の、演算部18が演算して得た値を、その上限値や下限値と比較するようにしても良い。
また、本実施の形態の、受付部110、上限値蓄積部111、下限値蓄積部112、比較部113、および出力部114の構成を、上記実施の形態1や、実施の形態3や、実施の形態4の構成に適用するようにしても良く、このような場合においても、上記と同様の効果を奏する。
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
以上のように、本発明にかかる微粒子検出装置等は、流体中の微粒子を検出するための装置として適しており、特に、所望の大きさや重さ等の微粒子を検出するための装置等として有用である。
1、10 採取管
2 第一微粒子センサ
3 分離部
3a 分離部
3b 分離部
3c 重力沈降室
4、6、11、12、13 配管
5 第二微粒子センサ
7 吸引装置
8、18、28、38 演算部
9 演算出力部
14、15 回収箱
19 ディスプレイ
28 演算部
30a 粘着シート
30b ミストシャワー発生器
31a、31b、31c 微粒子
31、32 部品
33 組立装置
38 演算部
90 サイクロン
90 円錐部材
91 吸入部
92 排出部
93 微粒子排出部
94 円錐部材
100〜105、100a 微粒子検出装置
110 受付部
111 上限値蓄積部
112 下限値蓄積部
113 比較部
114 出力部
130 表示灯
140 洗浄ノズル
141 回収シンク
142 排水口
190 第一サイクロン
191 第一吸入部
192 第一排出部
193 第一微粒子排出部
194、294 円錐部材
290 第二サイクロン
291 第二吸入部
292 第二排出部
293 第二微粒子排出部
2 第一微粒子センサ
3 分離部
3a 分離部
3b 分離部
3c 重力沈降室
4、6、11、12、13 配管
5 第二微粒子センサ
7 吸引装置
8、18、28、38 演算部
9 演算出力部
14、15 回収箱
19 ディスプレイ
28 演算部
30a 粘着シート
30b ミストシャワー発生器
31a、31b、31c 微粒子
31、32 部品
33 組立装置
38 演算部
90 サイクロン
90 円錐部材
91 吸入部
92 排出部
93 微粒子排出部
94 円錐部材
100〜105、100a 微粒子検出装置
110 受付部
111 上限値蓄積部
112 下限値蓄積部
113 比較部
114 出力部
130 表示灯
140 洗浄ノズル
141 回収シンク
142 排水口
190 第一サイクロン
191 第一吸入部
192 第一排出部
193 第一微粒子排出部
194、294 円錐部材
290 第二サイクロン
291 第二吸入部
292 第二排出部
293 第二微粒子排出部
Claims (13)
- 任意の環境から採取された流体中の微粒子を検出するセンサである第一微粒子センサと、
前記採取された流体から微粒子を分離する分離部と、
前記分離部が微粒子を分離した後の流体中の微粒子を検出するセンサである第二微粒子センサとを具備する微粒子検出装置。 - 前記任意の環境から前記流体を採取し、採取した流体を前記第一微粒子センサと、前記分離部とに、分割して送り込む管である採取管をさらに具備し、
前記第一微粒子センサは、前記採取管により分割されて送り込まれる流体中の微粒子を検出し、
前記分離部は、前記採取管により分割されて送り込まれる流体中の微粒子を、前記流体から分離する請求項1記載の微粒子検出装置。 - 前記分離部は、前記第一微粒子センサが微粒子を検出した後の流体から、微粒子を分離する請求項1記載の微粒子検出装置。
- 前記分離部は、フィルタである請求項1から請求項3いずれか記載の微粒子検出装置。
- 前記分離部は、重力沈降室である請求項1から請求項3いずれか記載の微粒子検出装置。
- 流体中の微粒子を分離するサイクロンであって、任意の環境から採取された流体を吸入する吸入部と、微粒子が分離された流体を排出する排出部と、分離された微粒子を排出する微粒子排出部とを有するサイクロンと、
前記吸入部、排出部、微粒子排出部のうちの異なるいずれかに個別に設けられた、流体中の微粒子を検出するセンサである第一および第二微粒子センサとを具備する微粒子検出装置。 - 流体中の微粒子を分離するサイクロンであって、任意の環境から採取された流体を吸入する第一吸入部と、微粒子が分離された流体を排出する第一排出部と、分離された微粒子を排出する第一微粒子排出部とを有する第一サイクロンと、
流体中の微粒子を分離するサイクロンであって、前記第一サイクロンよりも分離能力が優れており、前記第一排出部から排出された流体を吸入する第二吸入部と、微粒子が分離された流体を排出する第二排出部と、分離された微粒子を排出する第二微粒子排出部とを有する第二サイクロンと、
前記第一微粒子排出部に設けられた、流体中の微粒子を検出するセンサである第一微粒子センサと、
前記第二微粒子排出部に設けられた、流体中の微粒子を検出するセンサである第二微粒子センサとを具備する微粒子検出装置。 - 前記第一および第二微粒子センサが、それぞれ検出した微粒子に応じて出力する信号に基づいて、前記任意の環境から採取された流体中の微粒子の量に関する値を演算する演算部と、
前記演算部が演算して得た値を出力する演算出力部とを具備する請求項1から請求項7いずれか記載の微粒子検出装置。 - 前記第一および第二微粒子センサが、それぞれ検出した微粒子に応じて出力する信号に基づいて、前記任意の環境から採取された流体中の微粒子の量に関する値を演算する演算部と、
前記演算部が演算して得た値を、所定の値と比較し、その比較結果を取得する比較部と、
前記比較部の取得した比較結果に基づいた出力を行う出力部を具備する請求項1から請求項7いずれか記載の微粒子検出装置。 - 前記任意の環境から流体を連続的に吸引して、前記任意の環境から流体を採取する吸引装置をさらに具備する請求項1から請求項9いずれか記載の微粒子検出装置。
- 任意の環境から採取された流体中の微粒子を検出する第一微粒子検出ステップと、
前記採取された流体から微粒子を分離する分離ステップと、
前記分離ステップで微粒子を分離した後の流体中の微粒子を検出する第二微粒子検出ステップとを具備する微粒子検出方法。 - 流体中の微粒子を分離するサイクロンを用いて、任意の環境から採取された流体から微粒子を分離するステップと、
前記サイクロンに送り込まれる流体中の微粒子、前記サイクロンから排出される流体の微粒子、または、前記サイクロンにより流体中から分離されて排出される微粒子のうちの、2以上を個別に検出する第一および第二微粒子検出ステップとを具備する微粒子検出方法。 - 流体中の微粒子を分離する第一サイクロンを用いて、任意の環境から採取された流体から微粒子を分離するステップと、
前記第一サイクロンを用いて分離された微粒子を検出する第一微粒子検出ステップと、
流体中の微粒子を分離するサイクロンであって、前記第一サイクロンよりも分離能力が優れている第二サイクロンを用いて、任意の環境から採取された流体から微粒子を分離するステップと、
前記第二サイクロンを用いて分離された微粒子を検出する第二微粒子検出ステップとを具備する微粒子検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006024174A JP2007205831A (ja) | 2006-02-01 | 2006-02-01 | 微粒子検出装置および微粒子検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006024174A JP2007205831A (ja) | 2006-02-01 | 2006-02-01 | 微粒子検出装置および微粒子検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007205831A true JP2007205831A (ja) | 2007-08-16 |
Family
ID=38485432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006024174A Pending JP2007205831A (ja) | 2006-02-01 | 2006-02-01 | 微粒子検出装置および微粒子検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007205831A (ja) |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009243941A (ja) * | 2008-03-28 | 2009-10-22 | Tokyo Electron Ltd | パーティクル検出システム、パーティクル検出方法及びプログラム |
| JP2011185889A (ja) * | 2010-03-11 | 2011-09-22 | Nippon Steel Corp | 連続焼鈍炉内の異物濃度測定装置 |
| WO2012081285A1 (ja) * | 2010-12-14 | 2012-06-21 | シャープ株式会社 | 検出装置および検出方法 |
| WO2012081284A1 (ja) * | 2010-12-14 | 2012-06-21 | シャープ株式会社 | 検出装置および検出方法 |
| WO2012081358A1 (ja) * | 2010-12-14 | 2012-06-21 | シャープ株式会社 | 検出装置および検出方法 |
| WO2012150672A1 (ja) * | 2011-05-02 | 2012-11-08 | シャープ株式会社 | 検出装置および検出方法 |
| JP2013217805A (ja) * | 2012-04-10 | 2013-10-24 | Azbil Corp | 粒子測定装置の位置記録システム及び粒子測定装置の位置記録方法 |
| JP2013250229A (ja) * | 2012-06-04 | 2013-12-12 | Sony Corp | 微小粒子分取用マイクロチップ、該微小粒子分取用マイクロチップが搭載された微小粒子分取装置、並びに微小粒子の分取方法 |
| CN103616308A (zh) * | 2013-11-26 | 2014-03-05 | 江苏苏净集团有限公司 | 颗粒物滤膜平衡称重装置 |
| CN105181517A (zh) * | 2015-09-10 | 2015-12-23 | 河北科技大学 | 适用于大流量环境空气颗粒物滤膜的自动称重系统 |
| CN105181518A (zh) * | 2015-09-10 | 2015-12-23 | 河北科技大学 | 适用于中小流量环境空气颗粒物滤膜的自动称重系统 |
| CN106932236A (zh) * | 2017-03-01 | 2017-07-07 | 杭州微智兆智能科技有限公司 | 一种样品自动传送称量装置 |
| JP2018537691A (ja) * | 2015-10-16 | 2018-12-20 | プラネットウォッチ24 | 空気中の微粒子および/またはNOxガス密度を捕獲および記録する装置と方法 |
| JP2019117050A (ja) * | 2017-12-26 | 2019-07-18 | 東ソー株式会社 | 粒子検出装置 |
| JP2019117049A (ja) * | 2017-12-26 | 2019-07-18 | 東ソー株式会社 | 粒子検出装置及び粒子検出方法 |
| CN119534051A (zh) * | 2024-12-16 | 2025-02-28 | 山东大学 | 亚微米级颗粒物收集装置、收集系统及收集方法 |
-
2006
- 2006-02-01 JP JP2006024174A patent/JP2007205831A/ja active Pending
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009243941A (ja) * | 2008-03-28 | 2009-10-22 | Tokyo Electron Ltd | パーティクル検出システム、パーティクル検出方法及びプログラム |
| JP2011185889A (ja) * | 2010-03-11 | 2011-09-22 | Nippon Steel Corp | 連続焼鈍炉内の異物濃度測定装置 |
| WO2012081285A1 (ja) * | 2010-12-14 | 2012-06-21 | シャープ株式会社 | 検出装置および検出方法 |
| WO2012081284A1 (ja) * | 2010-12-14 | 2012-06-21 | シャープ株式会社 | 検出装置および検出方法 |
| WO2012081358A1 (ja) * | 2010-12-14 | 2012-06-21 | シャープ株式会社 | 検出装置および検出方法 |
| JP2012141277A (ja) * | 2010-12-14 | 2012-07-26 | Sharp Corp | 検出装置および検出方法 |
| WO2012150672A1 (ja) * | 2011-05-02 | 2012-11-08 | シャープ株式会社 | 検出装置および検出方法 |
| JP2013217805A (ja) * | 2012-04-10 | 2013-10-24 | Azbil Corp | 粒子測定装置の位置記録システム及び粒子測定装置の位置記録方法 |
| JP2013250229A (ja) * | 2012-06-04 | 2013-12-12 | Sony Corp | 微小粒子分取用マイクロチップ、該微小粒子分取用マイクロチップが搭載された微小粒子分取装置、並びに微小粒子の分取方法 |
| CN103616308B (zh) * | 2013-11-26 | 2015-09-09 | 江苏苏净集团有限公司 | 颗粒物滤膜平衡称重装置 |
| CN103616308A (zh) * | 2013-11-26 | 2014-03-05 | 江苏苏净集团有限公司 | 颗粒物滤膜平衡称重装置 |
| CN105181517A (zh) * | 2015-09-10 | 2015-12-23 | 河北科技大学 | 适用于大流量环境空气颗粒物滤膜的自动称重系统 |
| CN105181518A (zh) * | 2015-09-10 | 2015-12-23 | 河北科技大学 | 适用于中小流量环境空气颗粒物滤膜的自动称重系统 |
| JP2018537691A (ja) * | 2015-10-16 | 2018-12-20 | プラネットウォッチ24 | 空気中の微粒子および/またはNOxガス密度を捕獲および記録する装置と方法 |
| JP7186616B2 (ja) | 2015-10-16 | 2022-12-09 | プラネットウォッチ24 | 空気中の微粒子を捕獲および記録する装置と方法 |
| CN106932236A (zh) * | 2017-03-01 | 2017-07-07 | 杭州微智兆智能科技有限公司 | 一种样品自动传送称量装置 |
| JP2019117050A (ja) * | 2017-12-26 | 2019-07-18 | 東ソー株式会社 | 粒子検出装置 |
| JP2019117049A (ja) * | 2017-12-26 | 2019-07-18 | 東ソー株式会社 | 粒子検出装置及び粒子検出方法 |
| JP7003640B2 (ja) | 2017-12-26 | 2022-01-20 | 東ソー株式会社 | 粒子検出装置及び粒子検出方法 |
| JP7205056B2 (ja) | 2017-12-26 | 2023-01-17 | 東ソー株式会社 | 粒子検出装置 |
| CN119534051A (zh) * | 2024-12-16 | 2025-02-28 | 山东大学 | 亚微米级颗粒物收集装置、收集系统及收集方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007205831A (ja) | 微粒子検出装置および微粒子検出方法 | |
| TWI587248B (zh) | 具有塵土拒斥之粒子偵測器 | |
| US8813540B2 (en) | Analysis methods and devices for fluids | |
| US6779380B1 (en) | Measuring system for the control of residual dust in safety vacuum cleaners | |
| CN102473339B (zh) | 室调节 | |
| CN103890478B (zh) | 从压力气体系统中自动排出冷凝液的改进型方法 | |
| KR102550798B1 (ko) | 공기 조화기 및 그 제어방법 | |
| CN101652659A (zh) | 用于检测和量化流动液体中的气泡/微粒的超声波系统 | |
| KR101927587B1 (ko) | 공기 청정기 및 공기 청정기 필터의 청소 또는 교체 시기를 판단하는 방법 | |
| CN104903941A (zh) | 起火探测 | |
| WO1995006878A1 (fr) | Appareil de pipettage dote d'une fonction de detection de fermeture | |
| JP2008301878A (ja) | 電気掃除機 | |
| CN106193257A (zh) | 雨水收集方法以及雨水收集系统 | |
| JP2017116417A (ja) | 光電式ほこりセンサおよび空調機器 | |
| CN105651673A (zh) | 滤芯的效能检测装置、检测方法及呼吸机 | |
| JP2019178942A (ja) | 微粒子分析装置、微粒子分析システム及び洗浄方法 | |
| KR20150120246A (ko) | 필터의 먼지 누적량 측정 장치 | |
| JP4736608B2 (ja) | 報知装置及びこれを備えた電気掃除機 | |
| CN107848086A (zh) | 手持式工具设备 | |
| JP2007068684A (ja) | 電気掃除機 | |
| JP2013029473A (ja) | 吸引式ガス検知器 | |
| JP5040415B2 (ja) | 電気掃除機 | |
| CN1314996A (zh) | 粒子计数器的估计方法和实施所说的方法的装置/ | |
| JP4970985B2 (ja) | 花粉量算出方法、花粉量算出プログラム、花粉量算出システム | |
| CN112881574B (zh) | 一种pid检测采集系统及方法 |