JP2007223384A - シフトレバーユニット - Google Patents
シフトレバーユニット Download PDFInfo
- Publication number
- JP2007223384A JP2007223384A JP2006044559A JP2006044559A JP2007223384A JP 2007223384 A JP2007223384 A JP 2007223384A JP 2006044559 A JP2006044559 A JP 2006044559A JP 2006044559 A JP2006044559 A JP 2006044559A JP 2007223384 A JP2007223384 A JP 2007223384A
- Authority
- JP
- Japan
- Prior art keywords
- shift lever
- shift
- sensor
- shaft
- lever unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
- F16H59/105—Range selector apparatus comprising levers consisting of electrical switches or sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/0204—Selector apparatus for automatic transmissions with means for range selection and manual shifting, e.g. range selector with tiptronic
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
- Control Of Transmission Device (AREA)
Abstract
【課題】長期間に渡って動作信頼性を高く維持し得るシフトレバーユニットを提供すること。
【解決手段】シフトレバーユニット1は、シフトレバー12に連動して変位するガイドロッド11と、貫通スリット状のシフトゲートにガイドロッド11を貫通させて支持することでシフトレバー12の動作を規制するように構成した強度ゲート板15と、シフトポジションを検出するための少なくとも1個以上の検知センサ31とを有している。各検知センサ31は、強度ゲート板15により保持された状態でガイドロッド11の端部の変位位置を検知することによりシフトポジションを検出するように構成してある。
【選択図】図1
【解決手段】シフトレバーユニット1は、シフトレバー12に連動して変位するガイドロッド11と、貫通スリット状のシフトゲートにガイドロッド11を貫通させて支持することでシフトレバー12の動作を規制するように構成した強度ゲート板15と、シフトポジションを検出するための少なくとも1個以上の検知センサ31とを有している。各検知センサ31は、強度ゲート板15により保持された状態でガイドロッド11の端部の変位位置を検知することによりシフトポジションを検出するように構成してある。
【選択図】図1
Description
本発明は、シフトポジションに応じて電気的なポジション信号を出力するシフトレバーユニットに関する。
従来より、シフトレバーユニットとしては、例えば、シフトレバーを貫通させて支持する貫通スリット状のシフトゲートを設けた強度ゲート板を採用したものがある。この強度ゲート板によれば、シフトレバーの動作を規制して位置精度を高め、シフト操作時にドライバーが感じ得るシフト操作感を向上できる。
また、シフトレバーユニットとしては、例えば、シフトレバーの操作位置であるシフトポジションに応じて電気的なポジション信号を出力する電子式のものがある。そして、このような電子式のシフトレバーユニットとしては、シフトレバーに取り付けた検知片と、この検知片を検知する検知センサとを備えたものがある。このシフトレバーユニットは、検知センサによる検知結果に基づいて、シフトポジションに応じたポジション信号を出力する(例えば、特許文献1参照。)。
しかしながら、上記従来の電子式のシフトレバーユニットでは、次のような問題がある。すなわち、上記強度ゲート板の位置ずれ等に起因して上記シフトレバーが動作する際の位置精度が低下すると、上記検知センサによるシフトポジションの検出精度が低下するおそれがあるという問題がある。
本発明は、上記従来の問題点に鑑みてなされたものであり、長期間の使用期間に渡ってシフトポジションを精度良く検出し得る動作信頼性の高いシフトレバーユニットを提供しようとするものである。
本発明は、シフトレバーの操作位置であるシフトポジションを表すポジション信号を出力するシフトレバーユニットであって、
上記シフトレバーに対して剛性高く連結され、該シフトレバーに連動して変位するガイドロッドと、
貫通スリット状のシフトゲートに上記ガイドロッドを貫通させて支持することで上記シフトレバーの動作を規制するように構成した強度ゲート板と、
上記シフトポジションを検出するための少なくとも1個以上の検知センサとを有しており、
該各検知センサは、上記強度ゲート板により保持された状態で上記ガイドロッドの端部を検知することにより上記シフトポジションを検出するように構成してあることを特徴とするシフトレバーユニットにある(請求項1)。
上記シフトレバーに対して剛性高く連結され、該シフトレバーに連動して変位するガイドロッドと、
貫通スリット状のシフトゲートに上記ガイドロッドを貫通させて支持することで上記シフトレバーの動作を規制するように構成した強度ゲート板と、
上記シフトポジションを検出するための少なくとも1個以上の検知センサとを有しており、
該各検知センサは、上記強度ゲート板により保持された状態で上記ガイドロッドの端部を検知することにより上記シフトポジションを検出するように構成してあることを特徴とするシフトレバーユニットにある(請求項1)。
本発明のシフトレバーユニットは、上記シフトレバーに連動して変位する上記ガイドロッドと、該ガイドロッドの端部を検知する上記各検知センサと、上記ガイドロッドを貫通支持することで上記シフトレバーの動作を規制する上記強度ゲート板とを備えている。そして、このシフトレバーユニットは、上記検知センサによる検知結果に基づいて上記シフトポジションを検出し、上記ポジション信号を出力する。
このシフトレバーユニットでは、上記ガイドロッドを貫通支持する上記強化ゲート板が上記各検知センサを保持している。それ故、この強度ゲート板に位置ずれ等を生じても、上記ガイドロッドの端部の位置と、上記各検知センサの配設位置との間の位置関係が変動するおそれが少ない。したがって、上記強度ゲート板に保持した上記検知センサによれば、上記ガイドロッドの端部を精度高く検知でき、上記シフトレバーの操作位置である上記シフトポジションを精度高く検出することができる。
このように上記シフトレバーユニットによれば、上記強度ゲート板の位置ずれ等に対するロバスト性(頑健性)を高く確保し得る。上記シフトレバーユニットによれば、部品の寸法誤差や、部品の組み付け誤差や、部品に生じた歪み等に起因して上記強度ゲート板に位置ずれ等が発生した場合でも、上記検知センサを用いて上記シフトポジションを精度高く検出することができる。
以上のように、本発明のシフトレバーユニットは、長期間の使用期間に渡ってシフトポジションを精度高く検出し得る動作信頼性の高いものである。
本発明において、上記シフトレバーに対して剛性高く連結され、該シフトレバーに連動して上記ガイドロッドが変位する状態とは、上記シフトレバーの操作位置である上記シフトポジションに応じて、上記ガイドロッドの端部の位置をほぼ一意に特定可能な程度の連結状態を意味している。上記ガイドロッドと上記シフトレバーとの間の剛性の程度としては、上記検知センサを用いて、上記ガイドロッドの端部を上記各シフトポジション毎に区別して検知し得る程度の剛性が確保されていれば良い。
また、上記強度ゲート板が上記検知センサを保持する状態としては、上記検知センサ自体、あるいはチップ状の上記検知センサを実装したセンサ基板等を上記強度ゲート板に直接、取り付けした状態のほか、上記検知センサやセンサ基板等を保持したセンサブロック等を上記強度ゲート板に取り付けした状態等がある。
また、上記ガイドロッドの端部を検知する方法としては、仲介部材を介在せずに直接的に上記端部を検知する方法のほか、上記検知センサにより検知可能な仲介部材を介在して上記端部を検知する方法等がある。直接的に上記端部を検知する方法としては、例えば、渦電流式非接触変位計(ギャップセンサ)である上記検知センサを用いて導電材料よりなる上記端部を検知する方法や、磁気センサである上記検知センサを用いて着磁した上記端部を検知する方法等がある。また、仲介部材を介して上記端部を検知する方法としては、例えば、上記ガイドロッドの端部に係合した上記仲介部材を検知することで間接的に上記端部を検知する方法等がある。
ここで、一般に、上記強度ゲート板の位置ずれ等の要因の1つとして、上記シフトレバーユニットを構成する各部品の寸法精度のばらつきや、各部品を組み付けて上記シフトレバーユニットを完成させる際の組み付け精度のばらつき等が考えられる。上記シフトレバーユニットによれば、上記強度ゲート板に要求される取り付け位置精度を緩和できるため、これにより、各部品に要求される寸法精度や組み付け精度等を緩和し得る。
また、上記強度ゲート板の位置ずれ等の要因の1つとして、反復的に作用し得る車両振動あるいはドライバ−の過大な操作力等による歪み等に起因して後発的に発生するものがある。上記シフトレバーユニットによれば、使用期間中に発生し、経時的に変化するおそれがある上記強度ゲート板の取り付け構造の歪み等をある程度、許容できるようになる。そして、上記シフトレバーユニットによれば、上記強度ゲート板の取り付け構造の歪み等をある程度、許容することで、各部品に要求される強度等を緩和し得る。
したがって、上記シフトレバーユニットによれば、各部品に要求される精度や強度等を緩和することで、部品コストを低減でき、部品の小型化を実現できる。また、各部品に要求される組み付け精度を緩和することで製造コストを低減し得る。そして、部品コストや製造コスト等を低減することで、上記シフトレバーユニット全体の低コスト化を実現し得る。また、各部品の小型化を図ることで、上記シフトレバーユニット全体の小型化を実現し得る。
また、上記ガイドロッドの端部には、上記検知センサにより検知可能な反応領域を設けた反応板を係合してあることが好ましい(請求項2)。
上記検知センサが検知可能な上記反応板を介在して上記ガイドロッドの端部を検知する場合には、上記ガイドロッドをなす材料の選択範囲を拡張できると共に、上記ガイドロッドの端部の形状的な設計自由度を高めることができる。それ故、上記反応板を採用すれば、上記検知センサの被検知対象として求められる仕様と、上記ガイドロッドとして適切な仕様とを高いレベルで両立できるようになる。
上記検知センサが検知可能な上記反応板を介在して上記ガイドロッドの端部を検知する場合には、上記ガイドロッドをなす材料の選択範囲を拡張できると共に、上記ガイドロッドの端部の形状的な設計自由度を高めることができる。それ故、上記反応板を採用すれば、上記検知センサの被検知対象として求められる仕様と、上記ガイドロッドとして適切な仕様とを高いレベルで両立できるようになる。
また、上記各検知センサを実装したセンサ基板を有しており、該センサ基板は、上記強度ゲート板と対面する状態で該強度ゲート板に保持されていることが好ましい(請求項3)。
この場合には、上記各検知センサを実装した上記センサ基板を上記強度ゲート板に保持させることで、上記強度ゲート板と上記各検知センサとの間の位置ずれ等をさらに抑制することができる。
この場合には、上記各検知センサを実装した上記センサ基板を上記強度ゲート板に保持させることで、上記強度ゲート板と上記各検知センサとの間の位置ずれ等をさらに抑制することができる。
また、上記シフトレバーを回動可能に軸支するシャフト軸を有しており、上記シフトレバーは、上記シャフト軸を中心にして回動するように構成してあることが好ましい(請求項4)。
この場合には、上記シフトレバーに作用するおそれがある過大な操作力や反復的に作用する正常な操作力等に起因して、上記強度ゲート板の位置ずれ等を生じるおそれが高くなる。それ故、上記強度ゲート板に位置ずれ等が生じても上記シフトポジションを精度高く検出し得るという本発明の作用効果が特に有効となる。
この場合には、上記シフトレバーに作用するおそれがある過大な操作力や反復的に作用する正常な操作力等に起因して、上記強度ゲート板の位置ずれ等を生じるおそれが高くなる。それ故、上記強度ゲート板に位置ずれ等が生じても上記シフトポジションを精度高く検出し得るという本発明の作用効果が特に有効となる。
また、上記シャフト軸として、相互に直交する2軸のシャフト軸を備えていることが好ましい(請求項5)。
この場合には、上記強度ゲート板の位置ずれ等が2次元的に発生するおそれがある。上記強度ゲート板が2次元的に位置ずれ等すると、上記シフトポジションの検出精度がさらに低下するおそれがある。それ故、上記強度ゲート板の位置ずれ等に対して頑健であるという本発明の作用効果が一層、有効となる。
この場合には、上記強度ゲート板の位置ずれ等が2次元的に発生するおそれがある。上記強度ゲート板が2次元的に位置ずれ等すると、上記シフトポジションの検出精度がさらに低下するおそれがある。それ故、上記強度ゲート板の位置ずれ等に対して頑健であるという本発明の作用効果が一層、有効となる。
また、上記ガイドロッドは、上記各シャフト軸を越えて後端側に向けて上記シフトロッドから延長された延長ロッド部であることが好ましい(請求項6)。
この場合には、上記シフトレバーの延長方向に上記強度ゲート板を配置できるようになり、上記シフトレバーユニットの幅方向(上記シフトレバーに略直交する方向。)のサイズを抑制できる。それ故、多様な自動車部品が密接して搭載される車室内のごく狭いスペースに対応可能になり、車両搭載性を向上することができる。
この場合には、上記シフトレバーの延長方向に上記強度ゲート板を配置できるようになり、上記シフトレバーユニットの幅方向(上記シフトレバーに略直交する方向。)のサイズを抑制できる。それ故、多様な自動車部品が密接して搭載される車室内のごく狭いスペースに対応可能になり、車両搭載性を向上することができる。
また、上記検知センサは、磁気を検出する磁気センサであることが好ましい(請求項7)。
この場合には、上記検知センサは、磁気を利用して上記ガイドロッドの端部を非接触で検知できる。それ故、機械的な磨耗等による特性の劣化を抑制することができる。したがって、上記検知センサとして上記磁気センサを採用すれば、その優れた初期性能を長期間に渡って維持できる。
なお、上記検知センサとしては、上記磁気センサ以外にも、光センサや、接触センサ等、様々なセンサを採用することができる。
この場合には、上記検知センサは、磁気を利用して上記ガイドロッドの端部を非接触で検知できる。それ故、機械的な磨耗等による特性の劣化を抑制することができる。したがって、上記検知センサとして上記磁気センサを採用すれば、その優れた初期性能を長期間に渡って維持できる。
なお、上記検知センサとしては、上記磁気センサ以外にも、光センサや、接触センサ等、様々なセンサを採用することができる。
(実施例1)
本例は、動作信頼性を高めたシフトレバーユニット1に関する例である。この内容について、図1〜図8を用いて説明する。
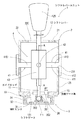
本例のシフトレバーユニット1は、図1及び図2に示すごとく、シフトレバー12の操作位置であるシフトポジションを表すポジション信号を出力するものである。
このシフトレバーユニット1は、シフトレバー12に対して剛性高く連結され、該シフトレバー12に連動して変位するガイドロッド11と、貫通スリット状のシフトゲート151にガイドロッド11を貫通させて支持することでシフトレバー12の動作を規制するように構成した強度ゲート板15と、シフトポジションを検出するための少なくとも1個以上の検知センサ31とを有している。
このシフトレバーユニット1の各検知センサ31は、強度ゲート板15により保持された状態でガイドロッド11の端部を検知することによりシフトポジションを検出するように構成してある。
以下、この内容について詳しく説明する。
本例は、動作信頼性を高めたシフトレバーユニット1に関する例である。この内容について、図1〜図8を用いて説明する。
本例のシフトレバーユニット1は、図1及び図2に示すごとく、シフトレバー12の操作位置であるシフトポジションを表すポジション信号を出力するものである。
このシフトレバーユニット1は、シフトレバー12に対して剛性高く連結され、該シフトレバー12に連動して変位するガイドロッド11と、貫通スリット状のシフトゲート151にガイドロッド11を貫通させて支持することでシフトレバー12の動作を規制するように構成した強度ゲート板15と、シフトポジションを検出するための少なくとも1個以上の検知センサ31とを有している。
このシフトレバーユニット1の各検知センサ31は、強度ゲート板15により保持された状態でガイドロッド11の端部を検知することによりシフトポジションを検出するように構成してある。
以下、この内容について詳しく説明する。
本例のシフトレバーユニット1は、図1〜図3に示すごとく、パーキングレンジ(Pレンジ11P)、ニュートラルレンジ(Nレンジ11N)、リバースレンジ(Rレンジ11R)、ドライブレンジ(Dレンジ11D)、シフトアップレンジ(+レンジ11A)、及びシフトダウンレンジ(−レンジ11S)を略H字状のシフトパターンに沿って配置したものである。
このシフトレバーユニット1では、図1〜図3に示すごとく、Pレンジ11P、Nレンジ11N、Rレンジ11Rの各シフトポジション、及び+レンジ11A、Dレンジ11D、−レンジ11Sの各シフトポジションをそれぞれ一直線上に配置してある。すなわち、大文字の”H”の文字をなす線分のうちの垂直方向の左右の各線分に沿って、Pレンジ11P、Nレンジ11N、Rレンジ11Rの各シフトポジション、あるいは+レンジ11A、Dレンジ11D、−レンジ11Sの各シフトポジションを配置してある。
シフトレバーユニット1では、図1及び図2に示すごとく、断面略矩形状を呈する筒状のユニットハウジング2の上面をなす化粧面21からシフトレバー12が突き出している。そして、シフトレバー12の突出方向の先端には、シフトノブ125を取り付けてある。ユニットハウジング2の化粧面21側には、シフトパターンに対応する略H字状のゲート220を設けた化粧プレート22を配設してある。化粧プレート22の表面には、各シフトポジションに対応してP、N、R、+、D、−のレタリング文字23をプリントしてある。
シフトレバーユニット1は、図1及び図2に示すごとく、ユニットハウジング2の内部に、シフトレバー12の回動機構4を収容している。 シフトレバーユニット1の下面、すなわち、上記化粧面21とは反対側の端面側には、強度ゲート板15を固定してある。さらに、強度ゲートゲート板15がなす外周面には、磁気センサ31を含むセンサブロック3を固定してある。そして、このシフトレバーユニット1は、ユニットハウジング2の外周側に設けたブラケット部24を利用して、車体側に取り付けるように構成してある。なお、図1では、ブラケット部24を省略して図示してある。
ユニットハウジング2は、図1及び図2に示すごとく、化粧面21側に化粧プレート22を有している。また、ユニットハウジング2は、幅方向(図1中、左右方向。)において相互に対面する2面の外周面25にシャフト孔251を穿設してなる。このシャフト孔251は、回動機構4を構成する第1の上記シャフト軸41(以下、シフトシャフト軸41という。)を貫通させるためのものである。
ユニットハウジング2における下面、すなわち、上記化粧面21とは反対側の端面は、開口部26を形成している。この開口部26は、強度ゲート板15を固定可能なように構成してある。なお、本例では、強度ゲート板15をねじ止めするように開口部26を構成した。これに代えて、スナップフィットなどを利用して強度ゲート板15を固定することもできる。
シフトレバー12は、図1、図2、図4及び図5に示すごとく、鉄よりなる棒状の部材である。シフトレバー12における車室内側の先端には、ドライバーが操作するシフトノブ125を取り付けてある。シフトレバー12は、後述する第2のシャフト軸42を貫通させるためのシャフト孔121を軸方向に略直交して穿孔してなる。
さらに、本例のシフトレバー12は、回動中心となるシャフト孔121を介してシフトノブ125とは反対側に向けて延長された延長ロッド部を有している。本例では、この延長ロッド部が、上記ガイドロッド11を構成している(以下、延長ロッド部11という。)。そして、延長ロッド部11の先端部には、後述する反応ピース35に係合する球状ピボット111を形成してある。
シフトレバー12を回動させるための回動機構4は、図1、図4及び図5に示すごとく、ユニットハウジング2に支持された上記シフトシャフト軸41と、シフトシャフト軸41により回転支持されたスリーブロッド43と、該スリーブロッド43とシフトレバー12とを連結する第2の上記シャフト軸42(以下、セレクトシャフト軸42という。)とを含む機構である。
スリーブロッド43は、図1、図4及び図5に示すごとく、シフトレバー12に外挿する略円筒状を呈する部材である。スリーブロッド43の外周面には、軸芯を挟んで相互に対面する2箇所の第1のシャフト孔431(図4参照。)と、同様に軸芯を挟んで相互に対面する2箇所の第2のシャフト孔432(図3参照。)とを穿孔してある。このスリーブロッド43では、第1のシャフト孔431が対面する方向と、第2のシャフト孔432が対面する方向とが略直交している。ここで、第1のシャフト孔431は、シフトシャフト軸41を挿入するためのものであり、第2のシャフト孔432は、セレクトシャフト軸42を挿入するためのものである。
シフトシャフト軸41に沿う断面構造を示す図4のごとく、回動機構4におけるシフトシャフト軸41は、同軸上に配置される二本一対のシャフト部材410よりなる。さらに、各シャフト部材410は、スリーブロッド43を回転支持する軸部411と、ユニットハウジング2に固定するためのフランジ状の固定部412とよりなる。回動機構4では、軸部411がユニットハウジング2のシャフト孔251を貫通すると共に、固定部412がユニットハウジング2の外周面25に固定されている。
回動機構4においては、図4に示すごとく、二本一対のシャフト部材410が略同軸上に配置され、所定の間隙を設けた状態で対向している。そして、各シャフト部材410の先端は、それぞれ、スリーブロッド43に設けた第1のシャフト孔431に挿入されている。回動機構4では、スリーブロッド43がシフトシャフト軸41により回転支持されている。
セレクトシャフト軸42に沿う断面構造を示す図5のごとく、セレクトシャフト軸42は、スリーブロッド43及び、該スリーブロッド43に内挿されたシフトレバー12を貫通する部材である。セレクトシャフト軸42の両端部429は、スリーブロッド43の第2のシャフト孔432に嵌合、固定されている。回動機構4においては、セレクトシャフト軸42により、スリーブロッド43に内挿されたシフトレバー12が回動支持されている。
以上のように本例の回動機構4では、図1、図4及び図5に示すごとく、シフトシャフト軸41によりスリーブロッド43が回転支持されている。そして、シフトシャフト軸41に略直交する方向にスリーブロッド43を貫通するセレクトシャフト軸42によりシフトレバー12が回動支持されている。それ故、この回動機構4によれば、シフトレバー12が略直交する2軸方向に沿って回動することができる。そしてこれにより、シフトレバーユニット1における略H字状のシフトパターン(図3参照。)が実現される。
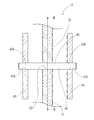
強度ゲート板15は、図6〜図8に示すごとく、シフトレバー12の延長ロッド部11を貫通させて支持することで、シフトレバー12の回動動作を規制する部材である。本例の強度ゲート板15は、ポリアミド樹脂よりなる厚さ5mmの略平板状の部材である。なお、強度ゲート板15の材質としては、ポリアミド樹脂等の樹脂材料に代えて、鉄等の金属材料を採用することもできる。
強度ゲート板15は、図6〜図8に示すごとく、シフトレバー12に連動して延長ロッド部11が回動する軌跡に対応して貫通スリット状のシフトゲート151を有している。本例では、略H字状のシフトパターン(図3参照。)に対応して、略H字状をなすシフトゲート151を設けた。強度ゲート板15では、延長ロッド部11の直径D1=5.3mmに対して、シフトゲート151のスリット幅W1を5.4mmに設定した。この強度ゲート板15によれば、シフトレバー12に連動した延長ロッド部11の回動動作を精度高く規制できる。
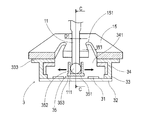
センサブロック3は、図6〜図8に示すごとく、各シフトポジションに対応するセンサ番号1〜6の6個の磁気センサ31を実装したセンサ基板32と、筐体をなすアウターケース33と、このアウターケース33に収容されるインナーケース34と、磁気センサ31が検知可能な反応領域351を設けた反応ピース35とを有してなる。センサブロック3は、全体として高さ方向に薄い箱状を呈しており、強度ゲート板15と対面する状態で該強度ゲート板15に固定するように構成してある。
センサ基板32は、図6〜図8に示すごとく、略平板状部材の表面に3行2列、6個の磁気センサ31を実装した基板である。各磁気センサ31は、所定の方向に作用する磁界を検知するセンサである。各磁気センサ31は、所定方向の磁界を検出したときのオン信号あるいは、非検出のときのオフ信号を出力するように構成してある。
センサ番号1〜6の各磁気センサ31は、Pレンジ11P等の各シフトポジションに個別に対応している。各シフトポジションに応じて、いずれか1個の磁気センサ31がオン信号を出力し、それ以外の磁気センサ31がオフ信号を出力する。本例では、センサ番号1の磁気センサ31がPレンジ11Pに、センサ番号2の磁気センサ31がNレンジ11Nに、センサ番号3の磁気センサ31がRレンジ11Rに、センサ番号4の磁気センサ31が+レンジ11Aに、センサ番号5の磁気センサ31がDレンジ11Dに、センサ番号6の磁気センサ31が−レンジ11Sに、それぞれ対応している。
なお、各シフトポジション毎に、磁気センサ31を2個ずつ配置することも良い。この場合には、いずれかの磁気センサ31にトラブルを生じた場合にもシフトレバーユニット1全体での正常な動作を維持し得るというフェールセーフ機能を確保することができる。さらになお、本例では、上記磁気センサ31としてホール効果ICを用いた。これに代えて、磁気センサとしては、磁気抵抗素子、ホール素子等を採用することもできる。
反応ピース35は、図6〜図8に示すごとく、樹脂材料にフェライト粉末等を混入して練り込み、射出成型したプラスチックマグネットよりなる部材である。反応ピース35は、延長ロッド部11の球状ピボット111を収容して係合する中空四角柱状の係合部352と、該係合部352の底側の端部に延設された平板状のプレート部353とよりなる。プレート部353は、係合部352とは反対側の裏面のほぼ全面に渡って、磁気センサ31により検知可能な反応領域351を形成してなる。なお、本例の反応領域351は、S極に着磁した領域である。
アウターケース33は、図6〜図8に示すごとく、高さ方向に薄い箱状を呈する部材であり、上記センサブロック3の筐体をなす部品である。アウターケース33は、強度ゲート板15側の端面に開口部331を設けてなる。この開口部331は、シフトレバー12に連動した延長ロッド部11の回動動作を許容するための空間である。
アウターケース33は、強度ゲート板15とは反対側の端面にも開口部332を有している。この開口部332は、上記センサ基板32を固定するように構成してある。それ故、センサ基板32を組み付けたセンサブロック3の内部では、センサ基板32がなす底面に磁気センサ31が配列される。さらに、アウターケース33は、センサブロック3を強度ゲート板15に固定するためのブラケット部333を有している。なお、本例では、プラスチック材料よりなるアウターケース33を採用した。
インナーケース34は、図6〜図8に示すごとく、アウターケース33内で進退する長箱状を呈する部材である。インナーケース34の長手方向の幅W2は、アウターケース33の内部空間の横幅に対してわずかに狭く設定してある。また、インナーケース34の幅D2は、アウターケース33の内部空間の奥行きよりも短く設定してある。それ故、アウターケース33に収容したインナーケース34は、長手方向の変位が規制され、幅D2方向にのみ変位できる。
インナーケース34における強度ゲート板15側の端面には、上記長手方向に延設された溝状の開口部341を設けてある。本例のインナーケース34では、上記反応ピース35の係合部352の奥行きD3に対して、開口部341の幅W4をわずかに大きく設定してある。それ故、係合部352が開口部341に位置するようにインナーケース34に収容した反応ピース35は、開口部341の延設方向に沿って進退でき、開口部341の幅方向への変位が規制される。
また、開口部341とは反対側の端面は、開口端342をなしている。それ故、センサブロック3では、インナーケース34に収容した反応ピース35が、開口端342を介してセンサ基板32に対面するようになる。なお、本例では、プラスチック材料よりなるインナーケース34を採用した。
シフトレバーユニット1に組み付けたセンサブロック3では、図4、図5及び図7に示すごとく、セレクトシャフト軸42回りにシフトレバー12が回動すると、該延長ロッド部11の球状ピボット111に係合する反応ピース35が、インナーケース34の開口部341の形成方向(図7中、矢印の方向。)を進退する。一方、図4、図5及び図8に示すごとく、シフトレバー12がシフトシャフト軸41周りを回動すると、上記反応ピース35が、インナーケース34と一体的にその幅方向(図8中、矢印の方向。)を進退することになる。
このように本例のセンサブロック3によれば、インナーケース34と反応ピース35との係合構造に基づいて、セレクトシャフト軸42回りのシフトレバー12の回動動作の正確性を向上することができる。また、アウターケース33とインナーケース34との収容構造に基づいて、シフトシャフト軸41回りのシフトレバー12の回動動作の精度を高めることができる。
次に、以上の各部品を組み付けて完成したシフトレバーユニット1の構成、及びその動作について説明する。
本例のシフトレバーユニット1では、シフトノブ125の操作位置がPレンジ11P等の各シフトポジションに位置したとき、対応するいずれか1つの磁気センサ31の真上に反応ピース35が位置する。ここで、上記のごとく反応ピース35は、センサ基板32に対面する表面に、着磁された反応領域351を有している。
本例のシフトレバーユニット1では、シフトノブ125の操作位置がPレンジ11P等の各シフトポジションに位置したとき、対応するいずれか1つの磁気センサ31の真上に反応ピース35が位置する。ここで、上記のごとく反応ピース35は、センサ基板32に対面する表面に、着磁された反応領域351を有している。
それ故、反応ピース35が対面する磁気センサ31がオン信号(1)を出力する一方、それ以外の磁気センサ31がオフ信号(0)を出力する。本例のシフトレバーユニット1は、図9に示すごとく、各磁気センサ31の検知信号に基づく6ビットのポジション信号を生成する。そして、このポジション信号は、図示しないコネクタを介して車両側に出力される。なお、同図では、縦軸にシフトポジションを示し、横軸に磁気センサのセンサ番号を示してある。
例えば、シフトポジションとしてDレンジ11Dが選択された際、図6に示すごとく、延長ロッド部11の球状ピボット部111に係合する反応ピース35がセンサ番号5の磁気センサ31の真上に位置することになる。そうすると、センサ番号5の磁気センサ31がオン信号を出力すると共に、それ以外の磁気センサ31がオフ信号を出力する。これにより、図9に示すごとく、「000010」なるポジション信号が出力されることになる。
以上のように、本例のシフトレバーユニット1では、シフトレバー12に対して剛性高く連結された延長ロッド部11の回動動作を規制する強度ゲート板15に対して、磁気センサ31を含むセンサブロック3を直接、固定してある。それ故、この強度ゲート板15の取り付け位置に位置ずれ等を生じても、シフトポジションに応じた延長ロッド部11の端部の位置と、磁気センサ31の配設位置との間で位置ずれ等を生じるおそれが極めて少ない。
したがって、シフトレバーユニット1によれば、強度ゲート板15の取り付け位置の位置ずれ等が生じた場合であっても、磁気センサ31を用いて延長ロッド部11の端部を精度高く検知できる。そして、延長ロッド部11の端部の位置を精度高く検知することで、シフトポジションを精度高く検出することができる。
したがって、本例のシフトレバーユニット1は、強度ゲート板15の取り付け位置の位置ずれ等に対するロバスト性(頑健性)を高く確保し得るものとなり得る。本例のシフトレバーユニットによれば、長期間の使用期間に渡って動作信頼性高くシフトポジションを検出することができる。
なお、本例では、シフトレバー12の延長部分である延長ロッド部11をガイドロッドとして採用したが、これに代えて、シフトレバー12とは別体のガイドロッドを採用することもできる。
なお、本例では、シフトレバー12の延長部分である延長ロッド部11をガイドロッドとして採用したが、これに代えて、シフトレバー12とは別体のガイドロッドを採用することもできる。
(実施例2)
本例は、実施例1のシフトレバーユニットを基にして、センサ基板32の構成を変更した例である。この内容について、図3、図10〜図14を用いて説明する。
本例のセンサ基板32は、図10及び図11に示すごとく、センサ番号1〜7の7つの上記磁気センサ31を配設したものである。そして、本例の反応ピース35は、センサ基板32に対面するプレート部353の表面に、磁気センサ31で検知可能な反応領域351と、磁気センサ31が検知しない非反応領域352とを組み合わせたセンシングパターン355を有している。
本例は、実施例1のシフトレバーユニットを基にして、センサ基板32の構成を変更した例である。この内容について、図3、図10〜図14を用いて説明する。
本例のセンサ基板32は、図10及び図11に示すごとく、センサ番号1〜7の7つの上記磁気センサ31を配設したものである。そして、本例の反応ピース35は、センサ基板32に対面するプレート部353の表面に、磁気センサ31で検知可能な反応領域351と、磁気センサ31が検知しない非反応領域352とを組み合わせたセンシングパターン355を有している。
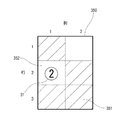
センシングパターン355は、図11、図12及び図14に示すごとく、各磁気センサ31に対応する7領域のセンシング領域350を組み合わせたものである。なお、図12では、センサ番号2の磁気センサ31に対応するセンシング領域350のみを抜き出して示してある。各センシング領域350は、反応領域351と非反応領域352とを3行2列の2次元アレイ状に配置したものである。反応領域351はS極に着磁した領域であり、非反応領域352は、N極に着磁した領域である。各磁気センサ31は、反応領域351に対面したときにオン信号(1)を出力し、上記非反応領域352に対面したときにオフ信号(0)を出力する。
センシング領域350は、図11、図12及び図14に示すごとく、シフトポジション毎にオン信号あるいはオフ信号が得られるよう、各磁気センサ31に対応して設けたものである。ここで、センサ番号2の磁気センサ31を例として、センシング領域350の構成について図12を用いて説明する。同図のセンシング領域350は、4領域の反応領域351と2領域の非反応領域352とを各シフトポジションに対応して配置したものである。なお、図12における磁気センサ31の位置は、シフトノブ125がNレンジ11N(図3参照。)に位置したときのものである。
反応ピース35側のセンシング領域350は、図12に示すごとく、固定された磁気センサ31(図12では、丸囲み数字「2」により位置を示してある。)に対して全体的に変位する。例えば、図3及び図12に示すごとく、Nレンジ11NからDレンジ11Dに切り替えるようにシフトレバーが図3中の右方向に回動すると、それに伴って、延長ロッド部が左方向に回動する。そうすると、延長ロッド部の端部に係合する反応ピース35が左方向に変位し、センシング領域350全体が図12中の左方向に変位する。これにより、磁気センサ31に対面する領域は、行番号2、列番号1の非反応領域352から行番号2、列番号2の反応領域351に切り替わる。
また、例えば、Nレンジ11NからRレンジ11Rに切り替えるようにシフトレバー12が手前側(図3中の下方向。)に回動すると、それに伴って、センシング領域350全体が図12中の上方向に変位する。これにより、磁気センサ31に対面する領域は、行番号2、列番号1の非反応領域352から行番号3、列番号1の反応領域351に切り替わる。
このように、図12のセンシング領域350では、行番号2、列番号1の非反応領域352がNレンジ11N(図3参照。)に対応し、行番号3、列番号1の反応領域351がRレンジ11Rに対応し、行番号1、列番号1の反応領域351がPレンジ11Pに対応し、行番号2、列番号2の反応領域351がDレンジ11Dに対応し、行番号3、列番号2の反応領域351が−レンジ11Sに対応し、行番号1、列番号2の非反応領域352が+レンジ11Aに対応している。
本例のシフトレバーユニットは、図14に示すごとく、各磁気センサ31から取り込んだ出力信号を組み合わせて、上記ポジション信号を出力するよう構成してある。図14においては、各行にシフトポジションを表すと共に、各列に磁気センサ31のセンサ番号を示してある。そして、同図では、シフトポジション毎の各磁気センサ31の1(オン信号)、0(オフ信号)の検知信号を示している。本例のポジション信号は、各シフトポジションについて、各磁気センサ31の検知信号を組み合わせたものである。
次に、上記のように構成したシフトレバーユニットの動作について説明する。図11に示すごとく、例えば、シフトノブ125がNレンジ11Nに位置すると、センサ番号1、3、4、6の各磁気センサ31が反応領域351に対面し、センサ番号2、5、7の各磁気センサ31が非反応領域352に対面する。これにより、Nレンジ11Nのポジション信号として「1011010」が出力される。
また、図13に示すごとく、シフトノブ125が図3中の上方向に操作されてPレンジ11Pが選択されると、反応ピース35全体が同図中の下方向に変位する。このとき、センサ番号1、2、4、7の各磁気センサ31が反応領域351に対面し、センサ番号3、5、6の各磁気センサ31が非反応領域352に対面する。これにより、Pレンジ11Pのポジション信号として「1101001」が出力される。さらにまた、図3及び図14に示すごとく、例えば、シフトノブがRレンジ11Rに位置すると、上記各磁気センサ31の出力信号を組み合わせた「1100110」がRレンジ11Rのポジション信号として出力される。
なお、本例では、各ポジション信号がハミング符号をなすように各センシング領域350を構成してある。それ故、本例のポジション信号に基づけば、1つの磁気センサ31にトラブルを生じた場合であってもポジション信号を訂正し、正しいポジション信号を出力できる。さらに、2つの磁気センサ31にトラブルを生じても、そのトラブルの発生を検知することができる。
上記ポジション信号を訂正する機能や、2つの磁気センサ31にトラブルを生じたことを検知する機能としては、シフトレバーユニットの一部の機能として構成しても良く、ポジション信号を受信するECU等の機能として構成することもできる。
なお、その他の構成及び作用効果については、実施例1と同様である。
なお、その他の構成及び作用効果については、実施例1と同様である。
1 シフトレバーユニット
11 ガイドロッド(延長ロッド部)
12 シフトレバー
125 シフトノブ
15 強度ゲート板
151 シフトゲート
2 ユニットハウジング
3 センサブロック
31 磁気センサ
32 センサ基板
33 アウターケース
34 インナーケース
35 反応ピース
4 回動機構
41 シャフト軸(シフトシャフト軸)
42 シャフト軸(セレクトシャフト軸)
43 スリーブロッド
11 ガイドロッド(延長ロッド部)
12 シフトレバー
125 シフトノブ
15 強度ゲート板
151 シフトゲート
2 ユニットハウジング
3 センサブロック
31 磁気センサ
32 センサ基板
33 アウターケース
34 インナーケース
35 反応ピース
4 回動機構
41 シャフト軸(シフトシャフト軸)
42 シャフト軸(セレクトシャフト軸)
43 スリーブロッド
Claims (7)
- シフトレバーの操作位置であるシフトポジションを表すポジション信号を出力するシフトレバーユニットであって、
上記シフトレバーに対して剛性高く連結され、該シフトレバーに連動して変位するガイドロッドと、
貫通スリット状のシフトゲートに上記ガイドロッドを貫通させて支持することで上記シフトレバーの動作を規制するように構成した強度ゲート板と、
上記シフトポジションを検出するための少なくとも1個以上の検知センサとを有しており、
該各検知センサは、上記強度ゲート板により保持された状態で上記ガイドロッドの端部を検知することにより上記シフトポジションを検出するように構成してあることを特徴とするシフトレバーユニット。 - 請求項1において、上記ガイドロッドの端部には、上記検知センサにより検知可能な反応領域を設けた反応板を係合してあることを特徴とするシフトレバーユニット。
- 請求項1又は2において、上記各検知センサを実装したセンサ基板を有しており、該センサ基板は、上記強度ゲート板と対面する状態で該強度ゲート板に保持されていることを特徴とするシフトレバーユニット。
- 請求項1〜3のいずれか1項において、上記シフトレバーを回動可能に軸支するシャフト軸を有しており、上記シフトレバーは、上記シャフト軸を中心にして回動するように構成してあることを特徴とするシフトレバーユニット。
- 請求項4において、上記シャフト軸として、相互に直交する2軸のシャフト軸を備えていることを特徴とするシフトレバーユニット。
- 請求項4又は5において、上記ガイドロッドは、上記シャフト軸を越えて後端側に向けて上記シフトロッドから延長された延長ロッド部であることを特徴とするシフトレバーユニット。
- 請求項1〜6のいずれか1項において、上記検知センサは、磁気を検知する磁気センサであることを特徴とするシフトレバーユニット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006044559A JP2007223384A (ja) | 2006-02-21 | 2006-02-21 | シフトレバーユニット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006044559A JP2007223384A (ja) | 2006-02-21 | 2006-02-21 | シフトレバーユニット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007223384A true JP2007223384A (ja) | 2007-09-06 |
Family
ID=38545601
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006044559A Pending JP2007223384A (ja) | 2006-02-21 | 2006-02-21 | シフトレバーユニット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007223384A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010096543A (ja) * | 2008-10-14 | 2010-04-30 | Alps Electric Co Ltd | 磁石の支持構造 |
| JP2011011617A (ja) * | 2009-07-01 | 2011-01-20 | Fuji Kiko Co Ltd | レバー位置検出装置 |
| JP2011093411A (ja) * | 2009-10-29 | 2011-05-12 | Fuji Kiko Co Ltd | シフト装置 |
| JP2011105168A (ja) * | 2009-11-18 | 2011-06-02 | Fuji Kiko Co Ltd | レバー位置検出装置 |
| WO2011152313A1 (ja) | 2010-05-31 | 2011-12-08 | 株式会社東海理化電機製作所 | シフトレバー装置のガイド板 |
| JP2012061994A (ja) * | 2010-09-17 | 2012-03-29 | Bosch Corp | チェンジレバーユニット |
| JP2012188018A (ja) * | 2011-03-10 | 2012-10-04 | Tokai Rika Co Ltd | 車両変速機用操作装置 |
| JP2012221342A (ja) * | 2011-04-12 | 2012-11-12 | Toyo Denso Co Ltd | ジョイスティック装置 |
| US8330454B2 (en) | 2008-10-14 | 2012-12-11 | Alps Electric Co., Ltd. | Position detection magnet and position detection apparatus |
| JP2014172469A (ja) * | 2013-03-07 | 2014-09-22 | Tsuda Industries Co Ltd | シフト装置 |
| JP2014172467A (ja) * | 2013-03-07 | 2014-09-22 | Tsuda Industries Co Ltd | シフト装置 |
| JP2016187994A (ja) * | 2015-03-30 | 2016-11-04 | 富士機工株式会社 | シフト装置 |
| EP3136056A1 (en) * | 2015-08-25 | 2017-03-01 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Position sensor |
| KR20180000183U (ko) * | 2016-07-07 | 2018-01-17 | (주)에스엠씨 | 변속레버의 센싱작동장치 |
| CN108953583A (zh) * | 2017-05-18 | 2018-12-07 | 明阳科技(苏州)股份有限公司 | 一种操纵杆及其制造方法 |
| US10458539B2 (en) | 2015-10-02 | 2019-10-29 | Denso Corporation | Vehicle control device |
| KR20200013526A (ko) * | 2018-07-30 | 2020-02-07 | 현대자동차주식회사 | 차량용 변속 레버 장치 |
| US11353313B2 (en) * | 2018-09-20 | 2022-06-07 | Panasonic Intellectual Property Management Co., Ltd. | Position detection device |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4512086Y1 (ja) * | 1965-12-27 | 1970-05-28 | ||
| JPS5435971U (ja) * | 1977-08-17 | 1979-03-09 | ||
| JPS61175714A (ja) * | 1985-01-30 | 1986-08-07 | Hino Motors Ltd | トランスミツシヨンの遠隔操作装置 |
| JPS6325712A (ja) * | 1986-07-18 | 1988-02-03 | Fuji Kiko Co Ltd | シフト装置 |
| JPH06323407A (ja) * | 1993-12-24 | 1994-11-25 | Aisin Aw Co Ltd | 車両用自動変速機の手動選速機構付シフト装置 |
| JP2004138235A (ja) * | 2002-08-20 | 2004-05-13 | Tokai Rika Co Ltd | シフトレバー装置 |
-
2006
- 2006-02-21 JP JP2006044559A patent/JP2007223384A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4512086Y1 (ja) * | 1965-12-27 | 1970-05-28 | ||
| JPS5435971U (ja) * | 1977-08-17 | 1979-03-09 | ||
| JPS61175714A (ja) * | 1985-01-30 | 1986-08-07 | Hino Motors Ltd | トランスミツシヨンの遠隔操作装置 |
| JPS6325712A (ja) * | 1986-07-18 | 1988-02-03 | Fuji Kiko Co Ltd | シフト装置 |
| JPH06323407A (ja) * | 1993-12-24 | 1994-11-25 | Aisin Aw Co Ltd | 車両用自動変速機の手動選速機構付シフト装置 |
| JP2004138235A (ja) * | 2002-08-20 | 2004-05-13 | Tokai Rika Co Ltd | シフトレバー装置 |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010096543A (ja) * | 2008-10-14 | 2010-04-30 | Alps Electric Co Ltd | 磁石の支持構造 |
| US8330454B2 (en) | 2008-10-14 | 2012-12-11 | Alps Electric Co., Ltd. | Position detection magnet and position detection apparatus |
| JP2011011617A (ja) * | 2009-07-01 | 2011-01-20 | Fuji Kiko Co Ltd | レバー位置検出装置 |
| JP2011093411A (ja) * | 2009-10-29 | 2011-05-12 | Fuji Kiko Co Ltd | シフト装置 |
| JP2011105168A (ja) * | 2009-11-18 | 2011-06-02 | Fuji Kiko Co Ltd | レバー位置検出装置 |
| WO2011152313A1 (ja) | 2010-05-31 | 2011-12-08 | 株式会社東海理化電機製作所 | シフトレバー装置のガイド板 |
| EP2578430A4 (en) * | 2010-05-31 | 2013-12-25 | Tokai Rika Co Ltd | GUIDE PLATE FOR A GEAR CIRCUITING DEVICE |
| US9127761B2 (en) | 2010-05-31 | 2015-09-08 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Guide plate for shift lever device |
| JP2012061994A (ja) * | 2010-09-17 | 2012-03-29 | Bosch Corp | チェンジレバーユニット |
| CN102410363A (zh) * | 2010-09-17 | 2012-04-11 | 博世株式会社 | 变速杆装置 |
| JP2012188018A (ja) * | 2011-03-10 | 2012-10-04 | Tokai Rika Co Ltd | 車両変速機用操作装置 |
| JP2012221342A (ja) * | 2011-04-12 | 2012-11-12 | Toyo Denso Co Ltd | ジョイスティック装置 |
| JP2014172467A (ja) * | 2013-03-07 | 2014-09-22 | Tsuda Industries Co Ltd | シフト装置 |
| JP2014172469A (ja) * | 2013-03-07 | 2014-09-22 | Tsuda Industries Co Ltd | シフト装置 |
| JP2016187994A (ja) * | 2015-03-30 | 2016-11-04 | 富士機工株式会社 | シフト装置 |
| EP3136056A1 (en) * | 2015-08-25 | 2017-03-01 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Position sensor |
| US20170059358A1 (en) * | 2015-08-25 | 2017-03-02 | Kabushiki Kaisha Tokai Rika Denki Seisakusho | Position sensor |
| US10458539B2 (en) | 2015-10-02 | 2019-10-29 | Denso Corporation | Vehicle control device |
| KR20180000183U (ko) * | 2016-07-07 | 2018-01-17 | (주)에스엠씨 | 변속레버의 센싱작동장치 |
| KR200485678Y1 (ko) | 2016-07-07 | 2018-02-07 | (주)에스엠씨 | 변속레버의 센싱작동장치 |
| CN108953583A (zh) * | 2017-05-18 | 2018-12-07 | 明阳科技(苏州)股份有限公司 | 一种操纵杆及其制造方法 |
| CN108953583B (zh) * | 2017-05-18 | 2024-04-05 | 明阳科技(苏州)股份有限公司 | 一种操纵杆及其制造方法 |
| KR20200013526A (ko) * | 2018-07-30 | 2020-02-07 | 현대자동차주식회사 | 차량용 변속 레버 장치 |
| KR102478060B1 (ko) | 2018-07-30 | 2022-12-15 | 현대자동차주식회사 | 차량용 변속 레버 장치 |
| US11353313B2 (en) * | 2018-09-20 | 2022-06-07 | Panasonic Intellectual Property Management Co., Ltd. | Position detection device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007223384A (ja) | シフトレバーユニット | |
| EP3056768B1 (en) | Shift device | |
| JP4806647B2 (ja) | 変速機用操作レバーのレバー操作位置判定装置 | |
| EP2058561A2 (en) | Movable body position detecting device | |
| JP2007186118A (ja) | シフト装置 | |
| JP6683585B2 (ja) | シフト装置 | |
| CN105682970A (zh) | 换挡装置 | |
| JP4629591B2 (ja) | シフト装置 | |
| JP2006234573A (ja) | 回転角度検出装置 | |
| JP2016141371A (ja) | シフト装置 | |
| JP2007045390A (ja) | シフト装置 | |
| JP2007302070A (ja) | シフトレバーユニット | |
| JP6778168B2 (ja) | シフト装置 | |
| JP2019064331A (ja) | シフト装置 | |
| JP4820699B2 (ja) | シフトレバー装置 | |
| JP4964581B2 (ja) | シフトレバー装置用シフトポジション検出装置 | |
| JP4921398B2 (ja) | 操作位置検出装置及びシフト装置 | |
| JP2023180975A (ja) | シフト装置 | |
| JP2008062664A (ja) | シフトレバーユニット | |
| JP5395703B2 (ja) | 多方向入力装置 | |
| JP2009016262A (ja) | 多方向操作装置 | |
| JP6723070B2 (ja) | シフト装置 | |
| US11746889B2 (en) | Shift device that enables detection accuracy to be improved | |
| JP7620375B2 (ja) | 入力装置 | |
| WO2019087740A1 (ja) | シフト装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110308 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110802 |