JP2007282460A - 同期制御システム - Google Patents
同期制御システム Download PDFInfo
- Publication number
- JP2007282460A JP2007282460A JP2006109453A JP2006109453A JP2007282460A JP 2007282460 A JP2007282460 A JP 2007282460A JP 2006109453 A JP2006109453 A JP 2006109453A JP 2006109453 A JP2006109453 A JP 2006109453A JP 2007282460 A JP2007282460 A JP 2007282460A
- Authority
- JP
- Japan
- Prior art keywords
- command
- torque command
- deceleration
- torque
- master
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Control Of Multiple Motors (AREA)
- Stopping Of Electric Motors (AREA)
Abstract
【解決手段】 加速度指令に基づいて補償トルク指令を生成する補償トルク演算部と、前記補償トルク指令とトルク指令に基づいて減速トルク指令を生成する減速トルク演算部と、前記補償トルク指令あるいは前記減速トルク指令のいずれかを選択する切替部と、を有した上位装置と、複数の駆動装置の直流電源入力に、共通に接続する電源回生用コンバータと、を備える。
【選択図】図1
Description
請求項2に記載の発明は、請求項1記載における前記複数の駆動装置のいずれか1つをマスタ、前記マスタ以外の駆動装置をスレーブとし、前記マスタの速度指令あるいは速度フィードバックに基づいて、前記切替部を切替えると共に、前記電源回生用コンバータを制御するものである。
請求項3に記載の発明は、請求項1記載における前記複数の駆動装置のいずれか1つをマスタ、前記マスタ以外の駆動装置をスレーブとし、前記減速トルク演算部が、前記マスタのトルク指令に基づいて減速トルク指令を生成するものである。
請求項4に記載の発明は、請求項1記載における前記補償トルクが、前記複数軸結合機械における可動部質量と前記加速度指令の乗算値であるものである。
また、請求項2または3に記載の発明によると、適用用途により必要に応じてトルク指令に加算する補償するトルクフィードフォワード指令を切換えることができる。また、機構系におけるマスタを容易に設定変更することができ、様々な機構系に対応することができ、汎用性を高めることができる。
また、請求項4に記載の発明によると、簡単に補償トルクを演算することができ、駆動装置の演算負荷を軽減することができる。
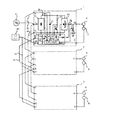
位置指令生成部110は、位置指令を生成して第1駆動装置200および第2駆動装置300に出力する、と同時に、加速度変換部120にもその位置指令を出力する。また、加速度変換部120は、例えば、位置指令を2階微分して加速度指令を算出し、補償トルク部130に出力する。また、補償トルク演算部130は、機構系の可動部と可動部に搭載される負荷との合算された質量と加速度指令とを乗算して補償トルク指令を出力する。また、減速トルク演算部140は、補償トルク指令とトルク指令を入力して減速トルク指令を出力する。すなわち、トルク指令に補償トルク指令を加算して減速を増す指令を生成するのである。
第1モータ410および第2モータ420の加速または一定速運転の場合、第1駆動装置200の速度指令に基づいた切替信号により、切替SW150が補償トルク指令を選択するように切替えられ、補償トルク指令は第1駆動装置200および第2駆動装置300に対し、トルクフィードフォワード指令として働く。
一方、第1モータ410および第2モータ420の減速停止の場合、第1駆動装置200の速度指令に基づいた切替信号により、切替SW150が減速トルク指令を選択するように切替えられ、減速トルク指令は第1駆動装置200および第2駆動装置300に対し、トルクフィードフォワード指令として働き、停止時間および停止距離の短縮を図ることができる。
200 第1駆動装置
300 第2駆動装置
400 リニアモータ可動子
500 リニアモータ固定子
600 位置検出部
700 電源回生用コンバータ
110 位置指令演算部
120 加速度変換部
130 補償トルク演算部
140 減速トルク演算部
150 切替SW
210 第1位置演算部
220 第1速度演算部
230 第1トルク演算部
240 第1速度変換部
310 第2位置演算部
320 第2速度演算部
330 第2トルク演算部
340 第2速度変換部
410 第1モータ
420 第2モータ
610 第1位置検出部
620 第2位置検出部
Claims (4)
- 同期した位置指令を出力する上位装置と、前記位置指令に基づいて複数軸結合機械に締結された複数のモータを駆動する複数の駆動装置と、を備え、前記複数のモータを同期運転する同期制御システムにおいて、
加速度指令に基づいて補償トルク指令を生成する補償トルク演算部と、前記補償トルク指令とトルク指令に基づいて減速トルク指令を生成する減速トルク演算部と、前記補償トルク指令あるいは前記減速トルク指令のいずれかを選択する切替部と、を有した前記上位装置と、
前記複数の駆動装置の直流電源入力に、共通に接続する電源回生用コンバータと、を備え、
同期運転における減速停止の場合、前記減速トルク指令を前記複数の駆動装置のトルク指令に加算すると共に、前記電源回生用コンバータを電源回生動作させることを特徴とする同期制御システム。 - 前記複数の駆動装置のいずれか1つをマスタ、前記マスタ以外の駆動装置をスレーブとし、前記マスタの速度指令あるいは速度フィードバックに基づいて、前記切替部を切替えると共に、前記電源回生用コンバータを制御することを特徴とする請求項1記載の同期制御システム。
- 前記複数の駆動装置のいずれか1つをマスタ、前記マスタ以外の駆動装置をスレーブとし、前記減速トルク演算部が、前記マスタのトルク指令に基づいて減速トルク指令を生成することを特徴とする請求項1記載の同期制御システム。
- 前記補償トルクが、前記複数軸結合機械における可動部質量と前記加速度指令の乗算値であることを特徴とする請求項1記載の同期制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006109453A JP4893075B2 (ja) | 2006-04-12 | 2006-04-12 | 同期制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006109453A JP4893075B2 (ja) | 2006-04-12 | 2006-04-12 | 同期制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007282460A true JP2007282460A (ja) | 2007-10-25 |
| JP4893075B2 JP4893075B2 (ja) | 2012-03-07 |
Family
ID=38683316
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006109453A Expired - Fee Related JP4893075B2 (ja) | 2006-04-12 | 2006-04-12 | 同期制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4893075B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102079484A (zh) * | 2010-02-26 | 2011-06-01 | 上海海事大学 | 双起升场桥双吊具同步控制系统 |
| WO2014091602A1 (ja) * | 2012-12-13 | 2014-06-19 | 三菱電機株式会社 | モータ制御装置 |
| CN105680733A (zh) * | 2016-03-17 | 2016-06-15 | 重庆交通大学 | 用于多电机同步控制的方法 |
| KR101768252B1 (ko) * | 2013-05-20 | 2017-08-14 | 엘에스산전 주식회사 | 모터제어 시스템 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06206655A (ja) * | 1993-01-11 | 1994-07-26 | Toshiba Corp | 張力制御装置 |
| JPH07110714A (ja) * | 1993-10-13 | 1995-04-25 | Fanuc Ltd | 複数モータによる位置、速度、トルク制御方法 |
| JPH11351864A (ja) * | 1998-06-10 | 1999-12-24 | Toyota Motor Corp | 道路勾配推定装置 |
| JP2003070291A (ja) * | 2001-08-22 | 2003-03-07 | Toshiba Corp | 電動機制御装置 |
| JP2005117832A (ja) * | 2003-10-09 | 2005-04-28 | Yaskawa Electric Corp | 電動機制御装置の非常停止方法 |
| JP2005176493A (ja) * | 2003-12-11 | 2005-06-30 | Yaskawa Electric Corp | モータ駆動装置の非常停止方法 |
-
2006
- 2006-04-12 JP JP2006109453A patent/JP4893075B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06206655A (ja) * | 1993-01-11 | 1994-07-26 | Toshiba Corp | 張力制御装置 |
| JPH07110714A (ja) * | 1993-10-13 | 1995-04-25 | Fanuc Ltd | 複数モータによる位置、速度、トルク制御方法 |
| JPH11351864A (ja) * | 1998-06-10 | 1999-12-24 | Toyota Motor Corp | 道路勾配推定装置 |
| JP2003070291A (ja) * | 2001-08-22 | 2003-03-07 | Toshiba Corp | 電動機制御装置 |
| JP2005117832A (ja) * | 2003-10-09 | 2005-04-28 | Yaskawa Electric Corp | 電動機制御装置の非常停止方法 |
| JP2005176493A (ja) * | 2003-12-11 | 2005-06-30 | Yaskawa Electric Corp | モータ駆動装置の非常停止方法 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102079484A (zh) * | 2010-02-26 | 2011-06-01 | 上海海事大学 | 双起升场桥双吊具同步控制系统 |
| WO2014091602A1 (ja) * | 2012-12-13 | 2014-06-19 | 三菱電機株式会社 | モータ制御装置 |
| TWI504132B (zh) * | 2012-12-13 | 2015-10-11 | Mitsubishi Electric Corp | 馬達控制裝置 |
| US9515581B2 (en) | 2012-12-13 | 2016-12-06 | Mitsubishi Electric Corporation | Motor control device |
| JPWO2014091602A1 (ja) * | 2012-12-13 | 2017-01-05 | 三菱電機株式会社 | モータ制御装置 |
| KR101768252B1 (ko) * | 2013-05-20 | 2017-08-14 | 엘에스산전 주식회사 | 모터제어 시스템 |
| CN105680733A (zh) * | 2016-03-17 | 2016-06-15 | 重庆交通大学 | 用于多电机同步控制的方法 |
| CN105680733B (zh) * | 2016-03-17 | 2018-05-04 | 重庆交通大学 | 用于多电机同步控制的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4893075B2 (ja) | 2012-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4096481B2 (ja) | サーボ制御装置 | |
| US9401669B2 (en) | Motor controller for synchronously controlling multiple motors | |
| JP5260719B2 (ja) | 停電の有無を判定する停電判定部を有するモータ駆動装置 | |
| US9048733B2 (en) | Motor driving device having reactive current instruction generating unit | |
| US9164495B2 (en) | Motor controller controlling two motors for driving single driven object | |
| CN101424940B (zh) | 直线电机驱动的多轴运动系统 | |
| US9050961B2 (en) | Brake drive and control device for detecting short circuit failure of switching element | |
| CN104426457A (zh) | 具备主轴的机床的控制装置 | |
| US9361260B2 (en) | Master device that changes data communication speed when preparation to drive motor is completed | |
| CN104300871A (zh) | 实现机床的停电时保护的电动机控制装置 | |
| JP2016001945A (ja) | モータ制御装置、及びそれに用いる誤配線検出方法 | |
| JP2009136058A (ja) | モータ駆動装置の制御方法および装置 | |
| JP2015006690A (ja) | サーボプレスラインの運転方法および運転制御装置 | |
| JP4893075B2 (ja) | 同期制御システム | |
| US12017361B2 (en) | Robot stopping method and robot system | |
| JP4565312B2 (ja) | サーボ制御装置と非常停止方法 | |
| US20130345837A1 (en) | Master device that changes data communication speed in accordance with the number of slave devices | |
| US9071174B2 (en) | Motor control device controlling a plurality of motors that drive one driven body | |
| US10437227B2 (en) | Motor drive system including abnormality detection unit of power storage device | |
| JP2009130990A (ja) | 複数の電動機の駆動装置及び該装置の制御方法 | |
| JP2005176493A5 (ja) | ||
| CN201181921Y (zh) | 直线电机驱动的多轴运动机构 | |
| JP4371325B2 (ja) | 射出成形機の駆動制御装置および駆動制御方法 | |
| US20190386594A1 (en) | Motor control apparatus driving one main axis switchingly by two motors | |
| JP2015213394A (ja) | 搬送システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110726 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110802 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111205 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150106 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |