JP2007304801A - 立体性認証方法、立体性認証装置および立体性認証プログラム - Google Patents
立体性認証方法、立体性認証装置および立体性認証プログラム Download PDFInfo
- Publication number
- JP2007304801A JP2007304801A JP2006131677A JP2006131677A JP2007304801A JP 2007304801 A JP2007304801 A JP 2007304801A JP 2006131677 A JP2006131677 A JP 2006131677A JP 2006131677 A JP2006131677 A JP 2006131677A JP 2007304801 A JP2007304801 A JP 2007304801A
- Authority
- JP
- Japan
- Prior art keywords
- dimensionality
- dimensional
- matrix
- points
- authentication
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Collating Specific Patterns (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
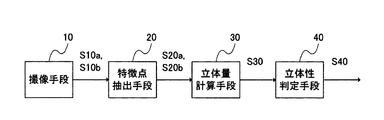
【解決手段】撮像手段10は、姿勢の異なる複数の顔画像S10a,S10bを撮像する。特徴抽出手段20は、顔画像S10a,S10bのそれぞれから、顔の中の特徴点を抽出する。抽出する特徴点は、任意の3つの特徴点(平面構成点)と、実物の顔においてその3点で構成される平面外の点(立体性評価点)である。立体量計算手段30は、特徴抽出手段20で抽出された各画像の特徴点座標S20a,S20bから立体性評価点の立体性評価量S30を計算する。立体性判定手段40は、立体量計算手段30で計算された立体性評価量S30と、あらかじめ与えられた閾値とにもとづいて、立体性評価点の立体性を判定することにより、顔画像が、現実の立体的な顔が被写体として撮像された画像であるか否かを判断する。
【選択図】図1
Description
以下、本発明の第1の実施の形態を図面を参照して説明する。図1は、本発明による立体性認証装置の第1の実施の形態を示すブロック図である。
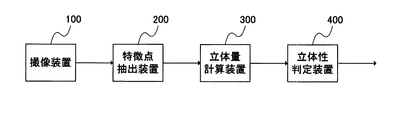
次に、本発明の第2の実施の形態を図面を参照して説明する。第2の実施の形態では、第1の実施の形態の各手段が立体性認証方法における各方法を実施する立体性認証装置について説明する。図5は、本発明による立体性認証装置の第2の実施の形態を示すブロック図である。図5に示す立体性認証装置は、撮像装置100と、特徴点抽出装置200と、立体量計算装置300と、立体性判定装置400とを備える。
次に、本発明の第3の実施の形態を図面を参照して説明する。第3の発明の実施の形態では、第1の実施の形態の特徴点抽出方法を計算機上で実行可能なプログラムとして構成し、そのプログラムを計算機で読み取り自在な情報記憶媒体に格納して、その計算機上において図8で示される手順で実行する。
20 特徴点抽出手段
30 立体量計算手段
40 立体性判定手段
Claims (13)
- 撮影対象物の立体性を判断する立体性認証方法であって、
撮影対象物が異なる複数の視点から単一の撮影装置で撮影された複数の撮影画像を取得する入力ステップと、
3次元座標系において同一平面上にないと推測される撮影対象物上の4つ以上の点に対応する特徴点を、前記入力ステップにおいて取得された撮影画像から抽出し、各特徴点の座標を取得する特徴点抽出ステップと、
前記特徴点抽出ステップにおいて抽出された各特徴点の座標にもとづいて、撮影対象物の立体度を示す立体性評価量を計算する立体量計算ステップと、
前記立体量計算ステップにおいて計算された立体性評価量にもとづいて撮影対象物の立体性を判定する立体性判定ステップと
を含むことを特徴とする立体性認証方法。 - 入力ステップにおいて、撮影対象物として人物の顔が撮影された撮影画像を取得する
請求項1記載の立体性認証方法。 - 特徴点抽出ステップにおいて、人物の顔の左目の中心、右目の中心、唇の左端、唇の右端、鼻の頂点、鼻の下および唇の上端のいずれか4つ以上の点に対応する特徴点を抽出する
請求項2記載の立体性認証方法。 - 立体量計算ステップにおいて、立体性評価量として、特徴点の座標の差を要素とする行列の最小特異値を計算する
請求項1から請求項3のうちのいずれか1項に記載の立体性認証方法。 - 立体量計算ステップにおいて、立体性評価量として、特徴点の座標の差を要素とする行列の転置行列と前記行列との積である正則行列の最小固有値を計算する
請求項1から請求項3のうちのいずれか1項に記載の立体性認証方法。 - 立体量計算ステップにおいて、立体性評価量として、特徴点の座標の差を要素とする行列の転置行列と前記行列との積である正則行列の特性多項式に0近傍の特定の2値を代入した値をそれぞれ計算する
請求項1から請求項3のうちのいずれか1項に記載の立体性認証方法。 - 撮影対象物の立体性を判断する立体性認証装置であって、
撮影対象物が異なる複数の視点から単一の撮影装置で撮影された複数の撮影画像を取得する入力手段と、
3次元座標系において同一平面上にないと推測される撮影対象物上の4つ以上の点に対応する特徴点を、前記入力手段によって取得された撮影画像から抽出し、各特徴点の座標を取得する特徴点抽出手段と、
前記特徴点抽出手段によって抽出された各特徴点の座標にもとづいて、撮影対象物の立体度を示す立体性評価量を計算する立体量計算手段と、
前記立体量計算手段によって計算された立体性評価量にもとづいて撮影対象物の立体性を判定する立体性判定手段と
を備えることを特徴とする立体性認証装置。 - 入力手段は、撮影対象物として人物の顔が撮影された撮影画像を取得する
請求項7記載の立体性認証装置。 - 特徴点抽出手段は、人物の顔の左目の中心、右目の中心、唇の左端、唇の右端、鼻の頂点、鼻の下および唇の上端のいずれか4つ以上の点に対応する特徴点を抽出する
請求項8記載の立体性認証装置。 - 立体量計算手段は、立体性評価量として、特徴点の座標の差を要素とする行列の最小特異値を計算する
請求項7から請求項9のうちのいずれか1項に記載の立体性認証装置。 - 立体量計算手段は、立体性評価量として、特徴点の座標の差を要素とする行列の転置行列と前記行列との積である正則行列の最小固有値を計算する
請求項7から請求項9のうちのいずれか1項に記載の立体性認証装置。 - 立体量計算手段は、立体性評価量として、特徴点の座標の差を要素とする行列の転置行列と前記行列との積である正則行列の特性多項式に0近傍の特定の2値を代入した値をそれぞれ計算する
請求項7から請求項9のうちのいずれか1項に記載の立体性認証装置。 - 撮影対象物の立体性を判断するコンピュータに搭載される立体性認証プログラムであって、
前記コンピュータに、
撮影対象物が異なる複数の視点から単一の撮影装置で撮影された複数の撮影画像を取得する入力処理と、
3次元座標系において同一平面上にないと推測される撮影対象物上の4つ以上の点に対応する特徴点を、前記入力処理において取得された撮影画像から抽出し、各特徴点の座標を取得する特徴点抽出処理と、
前記特徴点抽出処理において抽出された各特徴点の座標にもとづいて、撮影対象物の立体度を示す立体性評価量を計算する立体量計算処理と、
前記立体量計算処理において計算された立体性評価量にもとづいて撮影対象物の立体性を判定する立体性判定処理と
を実行させるための立体性認証プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006131677A JP4929828B2 (ja) | 2006-05-10 | 2006-05-10 | 立体性認証方法、立体性認証装置および立体性認証プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006131677A JP4929828B2 (ja) | 2006-05-10 | 2006-05-10 | 立体性認証方法、立体性認証装置および立体性認証プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011232592A Division JP5035467B2 (ja) | 2011-10-24 | 2011-10-24 | 立体性認証方法、立体性認証装置および立体性認証プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007304801A true JP2007304801A (ja) | 2007-11-22 |
| JP4929828B2 JP4929828B2 (ja) | 2012-05-09 |
Family
ID=38838680
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006131677A Expired - Fee Related JP4929828B2 (ja) | 2006-05-10 | 2006-05-10 | 立体性認証方法、立体性認証装置および立体性認証プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4929828B2 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010050206A1 (ja) * | 2008-10-28 | 2010-05-06 | 日本電気株式会社 | なりすまし検知システム、なりすまし検知方法及びなりすまし検知プログラム |
| WO2010137157A1 (ja) * | 2009-05-28 | 2010-12-02 | 株式会社東芝 | 画像処理装置、方法、プログラム |
| JPWO2010134200A1 (ja) * | 2009-05-22 | 2012-11-08 | 株式会社東芝 | 画像処理装置、方法及びプログラム |
| JP2020091892A (ja) * | 2014-08-28 | 2020-06-11 | ケビン・アラン・チューシーKevin Alan Tussy | 認証システムにおいてユーザを登録および認証するための方法、顔認証システム、ならびに認証システムにおいてユーザを認証するための方法 |
| JP2020525873A (ja) * | 2017-08-30 | 2020-08-27 | アリババ・グループ・ホールディング・リミテッドAlibaba Group Holding Limited | リソース移転方法、資金決済方法、および電子デバイス |
| US11157606B2 (en) | 2014-08-28 | 2021-10-26 | Facetec, Inc. | Facial recognition authentication system including path parameters |
| US11256792B2 (en) | 2014-08-28 | 2022-02-22 | Facetec, Inc. | Method and apparatus for creation and use of digital identification |
| WO2023281743A1 (ja) * | 2021-07-09 | 2023-01-12 | 日本電気株式会社 | 認証システム、認証装置、認証方法、及び記録媒体 |
| US11562055B2 (en) | 2014-08-28 | 2023-01-24 | Facetec, Inc. | Method to verify identity using a previously collected biometric image/data |
| US11727098B2 (en) | 2014-08-28 | 2023-08-15 | Facetec, Inc. | Method and apparatus for user verification with blockchain data storage |
| JP2024025106A (ja) * | 2022-08-10 | 2024-02-26 | 新東工業株式会社 | 情報処理装置およびアプリケーションプログラム |
| JP2024103525A (ja) * | 2018-11-05 | 2024-08-01 | 日本電気株式会社 | 情報処理装置、情報処理方法及び記録媒体 |
| US12130900B2 (en) | 2014-08-28 | 2024-10-29 | Facetec, Inc. | Method and apparatus to dynamically control facial illumination |
| US12141254B2 (en) | 2014-08-28 | 2024-11-12 | Facetec, Inc. | Method to add remotely collected biometric images or templates to a database record of personal information |
| USD1112260S1 (en) | 2016-04-26 | 2026-02-10 | Facetec, Inc. | Display screen or portion thereof with graphical user interface |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101798132B1 (ko) * | 2016-12-26 | 2017-11-16 | 한국생산기술연구원 | 로봇의 충돌 검출 고속화를 위한 작업 환경 모델링 장치 및 방법 |
| US11521460B2 (en) | 2018-07-25 | 2022-12-06 | Konami Gaming, Inc. | Casino management system with a patron facial recognition system and methods of operating same |
| US10878657B2 (en) | 2018-07-25 | 2020-12-29 | Konami Gaming, Inc. | Casino management system with a patron facial recognition system and methods of operating same |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001273496A (ja) * | 2000-03-28 | 2001-10-05 | Medeikku Engineering:Kk | 人物照合システム |
| JP2003178306A (ja) * | 2001-12-12 | 2003-06-27 | Toshiba Corp | 個人認証装置および個人認証方法 |
| JP2003271975A (ja) * | 2002-03-15 | 2003-09-26 | Sony Corp | 平面抽出方法、その装置、そのプログラム、その記録媒体及び平面抽出装置搭載型ロボット装置 |
| JP2005115847A (ja) * | 2003-10-10 | 2005-04-28 | Babcock Hitachi Kk | 特定立体画像と2次元画像に映し出された被写体の照合方法 |
| WO2005119507A1 (ja) * | 2004-06-03 | 2005-12-15 | Japan Science And Technology Agency | 行列の高速高精度特異値分解方法、プログラムおよび装置 |
| JP2007241402A (ja) * | 2006-03-06 | 2007-09-20 | Sharp Corp | 顔認証におけるなりすまし判定装置およびそれを用いた顔認証装置 |
-
2006
- 2006-05-10 JP JP2006131677A patent/JP4929828B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001273496A (ja) * | 2000-03-28 | 2001-10-05 | Medeikku Engineering:Kk | 人物照合システム |
| JP2003178306A (ja) * | 2001-12-12 | 2003-06-27 | Toshiba Corp | 個人認証装置および個人認証方法 |
| JP2003271975A (ja) * | 2002-03-15 | 2003-09-26 | Sony Corp | 平面抽出方法、その装置、そのプログラム、その記録媒体及び平面抽出装置搭載型ロボット装置 |
| JP2005115847A (ja) * | 2003-10-10 | 2005-04-28 | Babcock Hitachi Kk | 特定立体画像と2次元画像に映し出された被写体の照合方法 |
| WO2005119507A1 (ja) * | 2004-06-03 | 2005-12-15 | Japan Science And Technology Agency | 行列の高速高精度特異値分解方法、プログラムおよび装置 |
| JP2007241402A (ja) * | 2006-03-06 | 2007-09-20 | Sharp Corp | 顔認証におけるなりすまし判定装置およびそれを用いた顔認証装置 |
Cited By (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010050206A1 (ja) * | 2008-10-28 | 2010-05-06 | 日本電気株式会社 | なりすまし検知システム、なりすまし検知方法及びなりすまし検知プログラム |
| JP5445460B2 (ja) * | 2008-10-28 | 2014-03-19 | 日本電気株式会社 | なりすまし検知システム、なりすまし検知方法及びなりすまし検知プログラム |
| US8860795B2 (en) | 2008-10-28 | 2014-10-14 | Nec Corporation | Masquerading detection system, masquerading detection method, and computer-readable storage medium |
| JPWO2010134200A1 (ja) * | 2009-05-22 | 2012-11-08 | 株式会社東芝 | 画像処理装置、方法及びプログラム |
| WO2010137157A1 (ja) * | 2009-05-28 | 2010-12-02 | 株式会社東芝 | 画像処理装置、方法、プログラム |
| JPWO2010137157A1 (ja) * | 2009-05-28 | 2012-11-12 | 株式会社東芝 | 画像処理装置、方法、プログラム |
| US8401253B2 (en) | 2009-05-28 | 2013-03-19 | Kabushiki Kaisha Toshiba | Distinguishing true 3-d faces from 2-d face pictures in face recognition |
| US11562055B2 (en) | 2014-08-28 | 2023-01-24 | Facetec, Inc. | Method to verify identity using a previously collected biometric image/data |
| JP7274532B2 (ja) | 2014-08-28 | 2023-05-16 | ケビン・アラン・チューシー | 認証システムにおいてユーザを登録および認証するための方法、顔認証システム、ならびに認証システムにおいてユーザを認証するための方法 |
| US12141254B2 (en) | 2014-08-28 | 2024-11-12 | Facetec, Inc. | Method to add remotely collected biometric images or templates to a database record of personal information |
| US11157606B2 (en) | 2014-08-28 | 2021-10-26 | Facetec, Inc. | Facial recognition authentication system including path parameters |
| JP2021184265A (ja) * | 2014-08-28 | 2021-12-02 | ケビン・アラン・チューシーKevin Alan Tussy | 認証システムにおいてユーザを登録および認証するための方法、顔認証システム、ならびに認証システムにおいてユーザを認証するための方法 |
| US11256792B2 (en) | 2014-08-28 | 2022-02-22 | Facetec, Inc. | Method and apparatus for creation and use of digital identification |
| US12130900B2 (en) | 2014-08-28 | 2024-10-29 | Facetec, Inc. | Method and apparatus to dynamically control facial illumination |
| JP2020091892A (ja) * | 2014-08-28 | 2020-06-11 | ケビン・アラン・チューシーKevin Alan Tussy | 認証システムにおいてユーザを登録および認証するための方法、顔認証システム、ならびに認証システムにおいてユーザを認証するための方法 |
| US11574036B2 (en) | 2014-08-28 | 2023-02-07 | Facetec, Inc. | Method and system to verify identity |
| US12423398B2 (en) | 2014-08-28 | 2025-09-23 | Facetec, Inc. | Facial recognition authentication system and method |
| US11657132B2 (en) | 2014-08-28 | 2023-05-23 | Facetec, Inc. | Method and apparatus to dynamically control facial illumination |
| US11693938B2 (en) | 2014-08-28 | 2023-07-04 | Facetec, Inc. | Facial recognition authentication system including path parameters |
| US11727098B2 (en) | 2014-08-28 | 2023-08-15 | Facetec, Inc. | Method and apparatus for user verification with blockchain data storage |
| US11874910B2 (en) | 2014-08-28 | 2024-01-16 | Facetec, Inc. | Facial recognition authentication system including path parameters |
| US12500886B2 (en) | 2014-08-28 | 2025-12-16 | Facetec, Inc. | Method and apparatus for creation and use of digital identification |
| US11991173B2 (en) | 2014-08-28 | 2024-05-21 | Facetec, Inc. | Method and apparatus for creation and use of digital identification |
| USD1112260S1 (en) | 2016-04-26 | 2026-02-10 | Facetec, Inc. | Display screen or portion thereof with graphical user interface |
| JP2020525873A (ja) * | 2017-08-30 | 2020-08-27 | アリババ・グループ・ホールディング・リミテッドAlibaba Group Holding Limited | リソース移転方法、資金決済方法、および電子デバイス |
| US11087327B2 (en) | 2017-08-30 | 2021-08-10 | Advanced New Technologies Co., Ltd. | Resource transfer method, fund payment method, and electronic device |
| JP2024103525A (ja) * | 2018-11-05 | 2024-08-01 | 日本電気株式会社 | 情報処理装置、情報処理方法及び記録媒体 |
| WO2023281743A1 (ja) * | 2021-07-09 | 2023-01-12 | 日本電気株式会社 | 認証システム、認証装置、認証方法、及び記録媒体 |
| JP2024025106A (ja) * | 2022-08-10 | 2024-02-26 | 新東工業株式会社 | 情報処理装置およびアプリケーションプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4929828B2 (ja) | 2012-05-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5035467B2 (ja) | 立体性認証方法、立体性認証装置および立体性認証プログラム | |
| JP4929828B2 (ja) | 立体性認証方法、立体性認証装置および立体性認証プログラム | |
| JP5812599B2 (ja) | 情報処理方法及びその装置 | |
| JP5493108B2 (ja) | 距離画像カメラを用いた人体識別方法および人体識別装置 | |
| JP5106459B2 (ja) | 立体物判定装置、立体物判定方法及び立体物判定プログラム | |
| JP6685827B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| EP3651457B1 (en) | Pupillary distance measurement method, wearable eye equipment and storage medium | |
| JP6352208B2 (ja) | 三次元モデル処理装置およびカメラ校正システム | |
| JP6503906B2 (ja) | 画像処理装置、画像処理方法および画像処理プログラム | |
| TWI423653B (zh) | 攝像裝置、攝像控制方法、及記錄媒體 | |
| JP5672112B2 (ja) | ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム | |
| JP2002298142A (ja) | 人物画像検出方法、この方法を実行するためのプログラムを記録した記録媒体、人物画像検出装置及びこの装置を備えた撮影装置 | |
| JP2004094491A (ja) | 顔向き推定装置および顔向き推定方法ならびに顔向き推定プログラム | |
| JP5170094B2 (ja) | なりすまし検知システム、なりすまし検知方法およびなりすまし検知用プログラム | |
| CN112926464B (zh) | 一种人脸活体检测方法以及装置 | |
| JP6749498B2 (ja) | 撮影対象追跡装置及び撮影対象追跡方法 | |
| KR102807290B1 (ko) | 화상 처리 장치, 화상 처리 방법 및 화상 처리 프로그램 | |
| CN111489384A (zh) | 基于互视角的遮挡评估方法及装置、设备、系统和介质 | |
| JP2012057974A (ja) | 撮影対象サイズ推定装置及び撮影対象サイズ推定方法並びにそのプログラム | |
| JPWO2008041518A1 (ja) | 画像処理装置、画像処理装置の制御方法、および画像処理装置の制御プログラム | |
| Angladon et al. | The toulouse vanishing points dataset | |
| JP5276454B2 (ja) | 表情測定方法、表情測定プログラムならびに表情測定装置 | |
| JP2010231350A (ja) | 人物識別装置、そのプログラム、及び、その方法 | |
| JP4914870B2 (ja) | 混雑度計測装置、混雑度計測方法、混雑度計測プログラムおよびそのプログラムを記録した記録媒体 | |
| JP2018009927A (ja) | 画像処理装置、画像処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090415 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110706 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110823 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111024 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4929828 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |