JP2007305159A - 移動体の走行制御方法 - Google Patents
移動体の走行制御方法 Download PDFInfo
- Publication number
- JP2007305159A JP2007305159A JP2007208690A JP2007208690A JP2007305159A JP 2007305159 A JP2007305159 A JP 2007305159A JP 2007208690 A JP2007208690 A JP 2007208690A JP 2007208690 A JP2007208690 A JP 2007208690A JP 2007305159 A JP2007305159 A JP 2007305159A
- Authority
- JP
- Japan
- Prior art keywords
- stacker crane
- moving body
- information
- traveling
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Warehouses Or Storage Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【解決手段】移動前後方向に設けた輪体に支持されて同一軌道上を移動する2台のスタッカークレーンCにそれぞれ、軌道における位置を検出する位置検出手段と、この検出手段により検出された位置情報を他方のスタッカークレーンCへ送信し、他方のスタッカークレーンCから送信された位置情報を受信する光伝送器25を設け、各スタッカークレーンCは、光伝送器25により受信した他方の位置情報と自分の位置情報に基づいて他方のスタッカークレーンCとの接近を確認すると緊急停止する。この方法によれば、他方のスタッカークレーンCの接近を検知すると緊急停止することにより、スタッカークレーンC間の接触を防止できる。
【選択図】図6
Description
各移動体にそれぞれ、前記軌道における位置を検出する位置検出手段と、前記位置検出手段により検出された位置情報を他方の移動体へ送信し、他方の移動体から送信された位置情報を受信する送受信手段を設け、各移動体へ移動位置を指令する制御手段を設け、
各移動体は、前記送受信手段により受信した他方の位置情報と自分の位置情報に基づいて他方の移動体との接近を確認すると、移動を停止または他方の移動体とは逆方向へ移動し、前記位置検出手段により位置を確認することができなくなると、他方の移動体と最も距離をとることできる所定の軌道上の待機位置へ移動し、この位置を確認できなくなった情報を前記制御手段へ出力し、前記制御手段は、位置を確認できなくなった情報を入力し、この位置を確認することができなくなった移動体が前記所定の軌道上の待機位置まで移動したことを確認すると、他方の移動体を前記所定の軌道上の待機位置近傍まで移動可能とすることを特徴とするものである。
本発明の移動体の走行制御方法を、物品保管設備に備えられるスタッカークレーンに適用した場合について説明する。
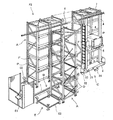
スタッカークレーンCは、図4に詳細に示すように、走行レール1に沿って走行する走行車体2に、昇降台3と、その昇降台3を昇降操作自在に案内支持する昇降マスト4とを設けて構成され、昇降台3には物品移載用のフォーク装置5が設けられている。
また第1スタッカークレーンCの統括制御部34には、上記HPの待機位置(1〜4ベイ)と干渉ゾーンZ1(18〜25ベイ)と干渉エリアK(18〜29ベイ)が設定され、また第2スタッカークレーンCの統括制御部34には、上記OPの待機位置(43〜46ベイ)と干渉ゾーンZ2(22〜29ベイ)と干渉エリアK(18〜29ベイ)が設定されている。
「通常運用」
通常運用時の走行制御方法を、第1スタッカークレーンCにより説明する。
<指令走行位置の出力(図7のフローチャート参照)>
a)コントローラE1は、上位の物品Fの入出庫を管理するコンピュータ(図示せず)より入出庫指令としてベイのナンバーからなる走行位置(指令された位置)の情報を入力すると(ステップ−a1)、この指令されたベイがアクセス可能範囲のベイ(1〜25ベイ)かどうかを確認する(ステップ−a2)。
<走行制御部による走行制御>
走行制御部31は、統括制御部34より指令走行位置情報を入力すると、この指令位置(定位置)への走行パターン(速度カーブ)を設定する。速度カーブの一例を図8に示す。
a.指令走行位置が干渉ゾーンZ1以外の位置のとき、第1スタッカークレーンCは指令走行位置へ移動して停止する。
走行制御では、上記求めている位置情報、走行速度、移動距離をフィードバックしており、また位置情報により停止位置が指令位置を超えたこと(オーバーラン)を確認すると、指令位置へ戻る修正移動を行う。
<走行中の監視>
統括制御部34は、走行制御部31より走行開始信号を入力すると以下の監視を実行する。
a)干渉ゾーンZ1へ侵入した旨の情報(侵入情報)を第1光伝送器25を介して第2スタッカークレーンCへ送信する。
5.第2スタッカークレーンCより緊急停止信号を受信すると、走行制御部31へ緊急停止信号を出力する。また緊急停止信号を受信しなくなると、走行制御部31へ移動開始信号を出力する。
このような通常運用の動作により、第1スタッカークレーンCは指令位置へ移動するとともに、この指令位置へ第2スタッカークレーンCが存在するとき、追い出し指令を第2スタッカークレーンCへ出力し、出力とともに移動を開始する。また第2スタッカークレーンCより追い出し指令を受信すると、第1干渉ゾーンZ1を外れたベイ位置へ移動する。
[緊急運用]
緊急運用時の走行制御方法を、第1スタッカークレーンCにより説明する。
CC クレーン制御装置(制御手段)
E1 コントローラ
M1,M2 電動モータ(走行駆動手段)
1 走行レール(軌道)
2 走行本体
12 車輪
21 車体側ロータリエンコーダ(位置検出手段)
23 エリアセンサ
24 干渉ゾーンセンサ
25,26,27 光伝送器(送受信手段)
28 待機位置検出器
31 走行制御部(走行制御手段)
34 統括制御部
41,42,43 無人搬送車(移動体)
Claims (2)
- 移動前後方向に設けた輪体に支持されて同一軌道上を移動する複数の移動体の走行制御方法であって、
各移動体にそれぞれ、
前記軌道における位置を検出する位置検出手段と、
前記位置検出手段により検出された位置情報を他方の移動体へ送信し、他方の移動体から送信された位置情報を受信する送受信手段
を設け、
各移動体へ移動位置を指令する制御手段を設け、
各移動体は、前記送受信手段により受信した他方の位置情報と自分の位置情報に基づいて他方の移動体との接近を確認すると、移動を停止または他方の移動体とは逆方向へ移動し、前記位置検出手段により位置を確認することができなくなると、他方の移動体と最も距離をとることできる所定の軌道上の待機位置へ移動し、この位置を確認できなくなった情報を前記制御手段へ出力し、
前記制御手段は、位置を確認できなくなった情報を入力し、この位置を確認することができなくなった移動体が前記所定の軌道上の待機位置まで移動したことを確認すると、他方の移動体を前記所定の軌道上の待機位置近傍まで移動可能とすること
を特徴とする移動体の走行制御方法。 - 各移動体は、前記位置検出手段により位置を確認することができなくなると、位置を確認することができなくなる直前の位置情報に基づいて、予め設定された、停止前の低速の走行速度による前記待機位置までの走行時間を算出し、前記低速の走行速度により前記待機位置まで移動して停止すること
を特徴とする請求項1に記載の移動体の走行制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007208690A JP4433014B2 (ja) | 2007-08-10 | 2007-08-10 | 移動体の走行制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007208690A JP4433014B2 (ja) | 2007-08-10 | 2007-08-10 | 移動体の走行制御方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000372199A Division JP4089154B2 (ja) | 2000-12-07 | 2000-12-07 | 移動体の走行制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007305159A true JP2007305159A (ja) | 2007-11-22 |
| JP4433014B2 JP4433014B2 (ja) | 2010-03-17 |
Family
ID=38838969
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007208690A Expired - Fee Related JP4433014B2 (ja) | 2007-08-10 | 2007-08-10 | 移動体の走行制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4433014B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8842985B2 (en) | 2010-07-01 | 2014-09-23 | Hokuyo Automatic Co., Ltd | Optical data transmission device, optical communication device, and automatic conveyance device |
| JP2018115051A (ja) * | 2017-01-18 | 2018-07-26 | JB−Create株式会社 | パレット及びケース自動収納ピッキングシステム |
-
2007
- 2007-08-10 JP JP2007208690A patent/JP4433014B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8842985B2 (en) | 2010-07-01 | 2014-09-23 | Hokuyo Automatic Co., Ltd | Optical data transmission device, optical communication device, and automatic conveyance device |
| JP2018115051A (ja) * | 2017-01-18 | 2018-07-26 | JB−Create株式会社 | パレット及びケース自動収納ピッキングシステム |
| US10040629B1 (en) | 2017-01-18 | 2018-08-07 | JB-Create, Inc. | Automated storage and retrieval system for pallets and cases |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4433014B2 (ja) | 2010-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4089154B2 (ja) | 移動体の走行制御方法 | |
| JP4586990B2 (ja) | 物品収納設備 | |
| EP1728738B1 (en) | Article transport facility and a method of operating the facility | |
| JP4775650B2 (ja) | 移動体の走行設備 | |
| TWI400187B (zh) | 物品收納設備及其控制方法 | |
| JP2007015780A (ja) | 物品収納設備 | |
| JP5626579B2 (ja) | 物品搬送装置及びこれを備えた物品搬送用の移動体 | |
| JP2006044934A (ja) | 物品搬送装置 | |
| JP4433014B2 (ja) | 移動体の走行制御方法 | |
| JP6627677B2 (ja) | 物品収納設備 | |
| JP5572104B2 (ja) | 移動体システム | |
| JP2006044935A (ja) | 搬送装置 | |
| JP2006076699A (ja) | 物品搬送車 | |
| JP6263416B2 (ja) | 駐車システムにおける搬送台車の停止方法 | |
| JPH09156720A (ja) | 保管設備 | |
| JP4023266B2 (ja) | 走行体の走行装置 | |
| JP4023292B2 (ja) | 移動体の制御装置 | |
| KR102027456B1 (ko) | 낙하물 또는 전방추돌 방지장치를 구비한 스마트 이동랙 및 이를 이용한 제어방법 | |
| JP4482804B2 (ja) | 物品搬送装置 | |
| JP2007099424A (ja) | 物品搬送装置 | |
| JP4640607B2 (ja) | 物品搬送設備 | |
| JP7589704B2 (ja) | スタッカークレーン | |
| JP4844826B2 (ja) | 物品収納設備 | |
| JP4403504B2 (ja) | 物品搬送装置 | |
| JP4466573B2 (ja) | 棚設備の出し入れ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070810 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091030 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091214 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4433014 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130108 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140108 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |