JP2007306528A - 動画像復号装置および動画像復号方法 - Google Patents
動画像復号装置および動画像復号方法 Download PDFInfo
- Publication number
- JP2007306528A JP2007306528A JP2006135808A JP2006135808A JP2007306528A JP 2007306528 A JP2007306528 A JP 2007306528A JP 2006135808 A JP2006135808 A JP 2006135808A JP 2006135808 A JP2006135808 A JP 2006135808A JP 2007306528 A JP2007306528 A JP 2007306528A
- Authority
- JP
- Japan
- Prior art keywords
- matrix
- zero
- dct coefficient
- coefficient
- transform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Abstract
【課題】演算量を削減し、処理コストを低減することができる、動画像復号装置および動画像復号方法を提供する。
【解決手段】DCT係数行列において、量子化された変換係数に関する情報を用いてゼロ以外の値を有するDCT係数が最後に出現する位置を検出することにより、ゼロ行列部分が存在するか否かを判定するDCT係数行列解析部3と、量子化されたDCT係数を逆量子化し、DCT係数を算出する逆量子化部4と、DCT係数を逆直交変換して動画像データを算出するIDCT部4とを備え、DCT係数行列解析部3は、DCT係数の量子化幅が所定の閾値を超えた場合にのみ、DCT係数行列においてゼロ行列部分が存在するか否かを判定し、ゼロ行列部分が存在する場合は、IDCT部4は、DCT係数行列からゼロ行列部分を除いた残りの部分行列についてのみ、逆直交変換を行うことを特徴とする。
【選択図】図1
【解決手段】DCT係数行列において、量子化された変換係数に関する情報を用いてゼロ以外の値を有するDCT係数が最後に出現する位置を検出することにより、ゼロ行列部分が存在するか否かを判定するDCT係数行列解析部3と、量子化されたDCT係数を逆量子化し、DCT係数を算出する逆量子化部4と、DCT係数を逆直交変換して動画像データを算出するIDCT部4とを備え、DCT係数行列解析部3は、DCT係数の量子化幅が所定の閾値を超えた場合にのみ、DCT係数行列においてゼロ行列部分が存在するか否かを判定し、ゼロ行列部分が存在する場合は、IDCT部4は、DCT係数行列からゼロ行列部分を除いた残りの部分行列についてのみ、逆直交変換を行うことを特徴とする。
【選択図】図1
Description
本発明は、動画像復号装置および動画像復号方法に関し、特に、直交変換を用いた高能率画像符号化により圧縮されたデジタル動画像信号を復号する、動画像復号装置および動画像復号方法に関する。
近年、画像情報をデジタルとして取り扱い、その際、効率の高い情報の伝送、蓄積を目的とし、画像情報特有の冗長性を利用して、離散コサイン変換(以下、DCT変換と示す)やカーネル・レーベ変換等の直交変換と動き予測・補償とにより圧縮するMPEGなどの方式に準拠した装置が、放送局などの情報配信、及び一般家庭における情報受信の双方において普及しつつある。
例えば、画像データを直交変換し、符号化することにより高能率に圧縮する離散コサイン変換方法(以下、ADCTと示す)は、以下のようにして画像データを圧縮する。まず、符号化しようとする入力画像の1画面を例えば8×8画素の2次元ブロックに分割し、各ブロックの画像に2次元離散的コサイン変換(以下、DCT変換と示す)を施す。DCT変換により、時間分布の係数からなる8行8列の画素データ行列は、空間周波数分布の係数(以下、DCT係数と示す)からなる8行8列のDCT係数行列に変換される。次に、DCT係数を視覚に適した閾値で量子化し、例えばエントロピー符号化などの符号化方法を用いて可変長符号化して符号化データを生成する。
一方、画像データの復号は、以下のようにして行われる。すなわち、符号化データから量子化されたDCT係数を復号し、量子化の際に用いられた量子化幅に基づきDCT係数を復元する。復元されたDCT係数を逆DCT変換することで、画像データを復元することができる。
ここで、画像データには高い周波数成分が少ないことや、人間の目には高い周波数成分の歪みが感知しにくい性質があることが、一般的に知られている。そこで、周波数成分信号を量子化する際に、高周波数成分の量子化幅を粗くすることで、量子化された高周波数成分のDCT係数はゼロになる確率が高くなる。
そこで、符号化データに現われるブロック終了の符号を利用して、DCT係数がゼロとなる範囲を検出し、DCT係数がゼロである部分行列(以下、ゼロ部分行列)を括り出し、ゼロ部分行列については逆DCT変換を省略することにより、演算量を削減する動画像復号装置および動画像復号方法が提案されている(例えば、特許文献1参照)。
しかしながら、特許文献1に記載された提案によれば、画像データの復号化の際には、DCT係数がゼロとなる範囲を検出してゼロ部分行列を括り出す処理を必ず行わなければならず、ゼロ部分行列を括り出せないようなDCT係数行列を有する画像データを復号する場合には、かえって演算量が増加し、処理時間や処理に必要な資源といった処理コストが増大してしまうという問題があった。
特開平6−217278号公報(図1)
本発明は、以上の点に鑑みてなされたもので、演算量を削減し、処理コストを低減することができる、動画像復号装置および動画像復号方法を提供することを目的とする。
本発明の一形態に係る動画像復号装置は、入力動画像を表す画素データをM×N画素からなるブロックごとに直交変換して得られる変換係数からなるM行N列の係数行列において、量子化された複数の前記変換係数に関する情報を用いてゼロ以外の値を有する前記変換係数が最後に出現する位置を検出することにより、ゼロ行列部分が存在するか否かを判定する直交係数行列解析部と、前記量子化された前記変換係数を逆量子化し、前記変換係数を算出する逆量子化部と、前記変換係数を逆直交変換して前記画素データを算出する逆直交変換部とを備え、前記直交係数行列解析部は、前記変換係数の量子化幅が所定の閾値を超えた場合にのみ、前記係数行列において前記ゼロ行列部分が存在するか否かを判定し、前記ゼロ行列部分が存在する場合は、前記係数行列から前記ゼロ行列部分を除いた残りの部分行列についてのみ、前記逆直交変換部において、前記係数行列から前記ゼロ行列部分を除いた残りの部分行列についてのみ、前記逆直交変換を行うことを特徴とする。
また、本発明の一形態に係る動画像復号方法は、入力動画像を表す画素データをM×N画素からなるブロックごとに直交変換して得られる変換係数からなるM行N列の係数行列において、量子化された複数の前記変換係数に関する情報を用いてゼロ以外の値を有する前記変換係数が最後に出現する位置を検出することにより、ゼロ行列部分が存在するか否かを判定する直交係数行列解析工程と、前記量子化された変換係数を逆量子化し、前記変換係数を算出する逆量子化工程と、前記変換係数を逆直交変換して前記画素データを算出する逆直交変換工程とを備え、前記直交係数行列解析工程は、前記変換係数の量子化幅が所定の閾値を超えた場合にのみ、前記係数行列において前記ゼロ行列部分が存在するか否かを判定し、前記ゼロ行列部分が存在する場合は、前記逆直交変換工程において、前記係数行列から前記ゼロ行列部分を除いた残りの部分行列についてのみ、前記逆直交変換を行うことを特徴とする。
演算量を削減し、処理コストを低減することができる、動画像復号装置および動画像復号方法を実現することができる。
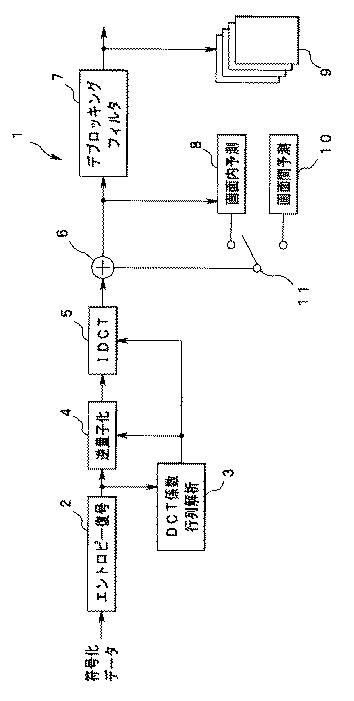
以下、図面を参照して本発明の実施の形態を説明する。始めに、本発明の実施の形態に係わる動画像復号装置の構成について、図1を用いて説明する。図1は、本発明の実施の形態に係わる動画像復号装置1の構成を説明するブロック図である。なお、本実施の形態に係わる動画像復号装置1は、ITU(International Telegraph Union)勧告H.264などに基づく画像符号方式によって符号化された動画像データを復号するものである。
符号化された動画像信号(以下、符号化データと示す)は、まず、エントロピー復号部2に入力される。エントロピー復号部2では、符号化データが可変長符号列から固定長符号列へ変換されてエントロピー復号データとなり、量子化された直交変換係数、例えば量子化されたDCT係数が求められる。量子化されたDCT係数は、DCT係数行列解析部3と逆量子化部4とに出力される。
DCT係数行列解析部3は、エントロピー復号データに基づき、逆量子化部4と、逆直交変換部としてのIDCT部5とにおける演算処理を制御するユニットである。DCT係数行列にゼロ部分行列が含まれている場合、該ゼロ行列部分に関しては逆量子化部4とIDCT部5とにおける演算処理を省略することができる。そこで、DCT係数行列解析部3では、DCT係数行列にゼロ部分行列が含まれているか否かが解析される。
一般的に、量子化幅QPが粗い(大きい)場合に高周波成分のDCT係数がゼロになりやすく、逆に、量子化幅QPが細かい(小さい)場合は、高周波成分のDCT係数はゼロにならない場合が多い。DCT係数行列にゼロ部分行列が含まれない場合、通常の復号処理に加えてDCT係数行列にゼロ部分行列が含まれるか否かを判定する処理が必要となるため、逆に演算量が増えて処理コストが増大してしまう。このため、DCT係数行列解析部3では、エントロピー復号データから、動画像データを符号化する際に用いられた量子化幅QPが最初に求められ、所定の閾値以上か否かが判定される。
閾値は、復号される動画像の種類などに応じて異なる値を設定することができ、量子化幅QPが0〜55の値をとる場合、例えば、復号される動画像が画面内予測による画像であるIピクチャ(Intra-Picture)の場合には閾値を40に、画面間予測による画像であるPピクチャ(Predictive-Picture)の場合には閾値を10に、設定することができる。量子化幅QPが所定の閾値以上であると判定された場合のみ、DCT係数行列解析部3では、DCT係数行列にゼロ部分行列が含まれているか否かが解析される。
DCT係数行列解析部3に入力されるエントロピー復号データには、量子化されたDCT係数に関する情報に関し、表1に示す項目について、この順でそれぞれの値が含まれている。
例えば、DCT係数行列が16個のDCT係数からなる4×4行列であり、量子化されたDCT係数が、{−2、4、3、−3、0、0、−1、0、0、0、0、0、0、0、0、0}の順に並べられて出力されている場合、量子化されたDCT係数に関する情報は表2のようになる。
4×4のDCT係数行列は、2×2の4つの部分行列(図2において、行列E、行列F、行列G、行列Hで示す、4つの部分行列)に分割することができる。DCT係数は高周波成分がゼロになりやすいため、DCT係数行列解析部3では、低周波成分の以外の部分行列、例えば、行列E以外の3つの部分行列がゼロ行列となるか否かが判定される。DCT係数は図2に示すようにDCT係数行列の各要素に配置されるため、以下の2つの条件のうちいずれかを満たした場合、行列F、行列G、行列Hがゼロ行列であると判定することができる。
〔条件1〕最後にゼロ以外の値を有するDCT係数が出現する順番が3番目以下
〔条件2〕4番目に読み込まれるDCT係数の値がゼロであり、かつ、最後にゼロ以外の値を有するDCT係数が出現する順番が5番目
読み込まれる16個のDCT係数のうち、ゼロ以外の値を有するDCT係数が最後に出現する順番(位置)は、表1に示す、エントロピー復号データに含まれる量子化されたDCT係数に関する情報から求めることができる。すなわち、TotalCoeffの値とTotal_zerosの値の合計が、最後にゼロ以外の値を有するDCT係数の位置となる。
〔条件2〕4番目に読み込まれるDCT係数の値がゼロであり、かつ、最後にゼロ以外の値を有するDCT係数が出現する順番が5番目
読み込まれる16個のDCT係数のうち、ゼロ以外の値を有するDCT係数が最後に出現する順番(位置)は、表1に示す、エントロピー復号データに含まれる量子化されたDCT係数に関する情報から求めることができる。すなわち、TotalCoeffの値とTotal_zerosの値の合計が、最後にゼロ以外の値を有するDCT係数の位置となる。
例えば、表2の場合、TotalCoeffが5であり、Total_zerosが2であるので、ゼロ以外の値を有するDCT係数が最後に出現する順番(位置)は、5+2=7番目となる。従って、DCT係数が表2に示すように読み込まれる場合、上述の条件1と条件2のいずれも満たさないため、DCT係数行列からゼロ部分行列を括り出すことができないと判定される。
DCT係数行列が8×8の場合、エントロピー復号データにおいて、DCT係数は16個ごとにブロック化されており、0ブロック〜3ブロックの4つのブロックに分割されて送信されてくる。DCT係数は、エントロピー復号部2において、画像を符号化する際に用いられた規格、例えばH.264に従って復号化されると、図3に示すロジックに従って並べ替えられ、図4に示すようにジグザグスキャンされることにより、図5に示すようにDCT係数行列の各要素として配置される。
ここで、図3は、DCT係数行列が8×8の場合における、DCT係数の並べ替え方法を説明するプログラム、図4は、DCT係数行列が8×8行列の場合におけるDCT係数のスキャン順序を示す概略図、図5は、エントロピー復号データにおけるDCT係数の送信順番とDCT係数行列における各要素との対応を説明する概略図である。図5において、DCT係数行列の各要素に記述された2つの数字のうち、左側の数字は、当該要素に配置されるDCT係数がエントロピー復号データにおいて存在していたブロックを示しており、右側の数字は、該ブロックの中に含まれる16個のDCT係数において、当該要素に配置されるDCT係数が出現する順番を0〜15の各数字で示している。
例えば、図5に示すDCT係数行列の1行2列目の要素には(1,0)と記述されているので、該要素に配置されるDCT係数は、エントロピー復号データにおいて、1ブロックの1番目に存在することになる。また、例えば、図5に示すDCT係数の4行5列目の要素には(3,7)と記述されているので、該要素に配置されるDCT係数は、エントロピー復号データにおいて、3ブロックの8番目に存在することになる。
8×8のDCT係数行列は、4×4の4つの部分行列(図6において、行列E´、行列F´、行列G´、行列H´で示す、4つの部分行列)に分割することができる。図6は、8×8のDCT係数行列における部分行列分割の一例を示す概略図である。従って、DCT係数行列が4×4の場合と同様に、DCT係数行列解析部3では、低周波成分の以外の部分行列、例えば、行列E´以外の3つの部分行列がゼロ行列となるか否かが判定される。エントロピー復号データとして送られてくるDCT係数は、図6に示すようにDCT係数行列の各要素に配置されるため、以下の3つの条件のうちいずれかを満たした場合、行列F´、行列G´、行列H´がゼロ行列であると判定することができる。
〔条件1〕ブロック0において最後にゼロ以外の値を有するDCT係数が出現する順番が4番目以下であり、かつ、ブロック1において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下であり、かつ、ブロック2において最後にゼロ以外の値を有するDCT係数が出現する順番が2番目以下であり、かつ、ブロック31において最後にゼロ以外の値を有するDCT係数が出現する順番が3番目以下
〔条件2〕ブロック0において最後にゼロ以外の値を有するDCT係数が出現する順番が4番目以下であり、かつ、ブロック1とブロック2において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下であり、かつ、ブロック3において最後にゼロ以外の値を有するDCT係数が出現する順番が3番目以下であり、かつ、ブロック2において3番目と4番目に読み込まれるDCT係数の値がゼロ
〔条件3〕DCT係数行列において11番目、15番目、16番目にスキャンされる要素に該当するDCT係数の値がゼロであり、かつ、18番目、19番目にスキャンされる要素に該当するDCT係数が、当該DCT係数が存在するブロックにおいて最後にゼロ以外の値を有するもののうち最も順番が遅い(すなわち、ブロック2において3番目に読み込まれるDCT係数の値がゼロであり、かつ、ブロック2において4番目に読み込まれるDCT係数の値がゼロであり、かつ、ブロック3において4番目に読み込まれるDCT係数の値がゼロであり、かつ、ブロック1において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下であり、かつ、ブロック2において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下)
なお、各ブロックにおいて読み込まれる16個のDCT係数のうち、ゼロ以外の値を有するDCT係数が最後に出現する順番(位置)は、4×4のDCT係数行列の場合と同様に、TotalCoeffの値とTotal_zerosの値の合計として求められる。
〔条件2〕ブロック0において最後にゼロ以外の値を有するDCT係数が出現する順番が4番目以下であり、かつ、ブロック1とブロック2において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下であり、かつ、ブロック3において最後にゼロ以外の値を有するDCT係数が出現する順番が3番目以下であり、かつ、ブロック2において3番目と4番目に読み込まれるDCT係数の値がゼロ
〔条件3〕DCT係数行列において11番目、15番目、16番目にスキャンされる要素に該当するDCT係数の値がゼロであり、かつ、18番目、19番目にスキャンされる要素に該当するDCT係数が、当該DCT係数が存在するブロックにおいて最後にゼロ以外の値を有するもののうち最も順番が遅い(すなわち、ブロック2において3番目に読み込まれるDCT係数の値がゼロであり、かつ、ブロック2において4番目に読み込まれるDCT係数の値がゼロであり、かつ、ブロック3において4番目に読み込まれるDCT係数の値がゼロであり、かつ、ブロック1において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下であり、かつ、ブロック2において最後にゼロ以外の値を有するDCT係数が出現する順番が5番目以下)
なお、各ブロックにおいて読み込まれる16個のDCT係数のうち、ゼロ以外の値を有するDCT係数が最後に出現する順番(位置)は、4×4のDCT係数行列の場合と同様に、TotalCoeffの値とTotal_zerosの値の合計として求められる。
8×8のDCT係数行列は、図7に示すように、2×4の部分行列(行列E”)と、2×6の部分行列(行列F”)と、6×2の部分行列(行列G”)と、6×6の部分行列(行列H”)とに分割することもできる。図7は、8×8のDCT係数行列における部分行列分割の別の一例を示す概略図である。このように部分行列に分割した場合、以下の条件を満たした場合、行列F”、行列G”、行列H”がゼロ行列であると判定することができる。
〔条件〕ブロック0において最後にゼロ以外の値を有するDCT係数が出現する順番が2番目以下であり、かつ、ブロック1とブロック2において最後にゼロ以外の値を有するDCT係数が出現する順番が1番目以下であり、かつ、ブロック3のDCT係数がすべてゼロ
このようにして、DCT係数行列解析部3では、量子化幅QPが所定の閾値以上であると判定された場合に、DCT係数行列にゼロ部分行列が含まれているか否かが解析される。DCT係数行列にゼロ部分行列が含まれていると判定された場合、DCT係数行列解析部3は、逆量子化部4とIDCT部5に対して、DCT係数行列を部分行列に分割し、ゼロ部分行列については処理を省略するよう指示する。
このようにして、DCT係数行列解析部3では、量子化幅QPが所定の閾値以上であると判定された場合に、DCT係数行列にゼロ部分行列が含まれているか否かが解析される。DCT係数行列にゼロ部分行列が含まれていると判定された場合、DCT係数行列解析部3は、逆量子化部4とIDCT部5に対して、DCT係数行列を部分行列に分割し、ゼロ部分行列については処理を省略するよう指示する。
逆量子化部4では、動画像データを符号化する際に用いられた量子化幅に基づき、量子化されたDCT係数がDCT係数に変換される。DCT係数行列解析部3からゼロ部分行列に関して処理を省略する旨の指示を受信した場合、当該部分についてはDCT係数への変換は行わない。このように不必要な変換処理を省略することによって、演算量を減らすことが可能となり、処理コストを削減することができる。変換されたDCT係数は、IDCT部5へ出力される。
IDCT部5では、逆量子化部4から入力されたDCT係数を要素とするDCT係数行列を用いて2次元の逆直交変換が行われ、符号化前の動画像データ(動画像から予測画像を差し引いた差分画像データ)が生成される。IDCT部5での逆直交変換処理は、(1)式に示す行列演算で表される。
HT×X×H … (1)
(1)式において、行列Xは逆量子化部4から入力されたDCT係数を要素とするDCT係数行列であり、行列HTは行列Hの転置行列である。また、行列Hは逆直交変換行列であり、Hが4×4の場合、H.264では(2)式のように定義されている。
(1)式において、行列Xは逆量子化部4から入力されたDCT係数を要素とするDCT係数行列であり、行列HTは行列Hの転置行列である。また、行列Hは逆直交変換行列であり、Hが4×4の場合、H.264では(2)式のように定義されている。
なお、逆直交変換行列が8×8の場合には、通常の行列演算を行った場合の演算回数は(8×64)×2=1024回となる。これに対し、行列Xを分割して4×4の行列E´のみに関して次元数を減らした演算をした場合、演算回数は((4×16)×2)×4=512回となり、やはり演算回数を50%に削減することができる。更に、行列Xを分割して2×2の行列E”のみに関して次元数を減らした演算をした場合、演算回数は(2×4)×2+(2×4+2×12)×2+(2×12)×2=128回となり、演算回数を12.5%まで大幅に削減することができる。このようにIDCT部5においても逆量子化部4と同様に、不必要な変換処理を省略することによって演算量を減らすことが可能となり、処理コストを削減することができる。
IDCT部5で生成された差分画像データは、加算部6へ出力され、予測画像データと加算されて再生画像データとして出力される。加算部6で差分画像データと加算される予測画像データは、スイッチ11により、復号される動画像が画面内予測による画像であるIピクチャの場合には画面内予測部8から出力される予測画像データが、画面間予測による画像であるPピクチャの場合には画面間予測部10から出力される予測画像データが選択される。
加算部6から出力される再生画像データは、デブロッキングフィルタ部7に入力される。デブロッキングフィルタ部7では、画像データの符号化を行う際などに生じたブロック境界部における歪みが再生画像データから除去されて、図示しないモニタなどに復号動画像データとして出力される。なお、復号される動画像が画面内予測による画像であるIピクチャの場合には、加算部6から出力される再生画像データは、画面内予測部8にも入力される。
復号される動画像が画面間予測による画像であるPピクチャの場合、デブロッキングフィルタ部7から出力される復号動画像データは、フレームメモリ9にも出力され、参照画像データとして蓄積される。フレームメモリ9に蓄積された参照画像データは、画面間予測部10に出力され、動き補償などの処理を施されることにより、予測画像データに変換される。
次に、上述した動画像復号装置を用いた動画像復号方法について、図8を用いて説明する。図8は、本実施の形態に係わる動画像復号の手順を説明するフローチャートである。
まず、ステップS1において、符号化データのエントロピー復号化処理が行われる。次に、ステップS2において、DCT係数行列解析部3において、DCT係数行列からゼロ部分行列を括り出す処理を行うか否かを判定するための閾値が設定される。閾値は、復号される動画像の種類などに応じた値が設定され、量子化幅QPが0〜55の値をとる場合、例えば、復号される動画像が画面内予測による画像であるIピクチャ(Intra-Picture)の場合には40に、画面間予測による画像であるPピクチャ(Predictive-Picture)の場合には10に、設定される。
続いて、ステップS3では、DCT係数行列解析部3において、動画像データを符号化する際に用いられた量子化幅QPが符エントロピー復号データから求められ、ステップS2で設定された閾値と比較される。量子化幅QPが閾値以上である場合、ステップS4に進み、エントロピー復号データから、ゼロ以外の値を有するDCT係数が最後に出現する順番(位置)が算出された後、ステップS5に進む。一方、量子化幅QPが閾値未満である場合、ステップS5に進む。
ステップS5では、エントロピー復号データがジグザグスキャンされ、量子化されたDCT係数がDCT係数行列の各要素として配置される。続いて、ステップS6において、ステップS3と同様に、動画像データを符号化する際に用いられた量子化幅QPがステップS2で設定された閾値と比較される。量子化幅QPが閾値以上である場合、ステップS6に進み、DCT係数行列からゼロ部分行列が括り出せるか否かが判定される。なお、判定基準は、DCT係数行列のサイズ(行列数)によって異なり、具体的な基準は上述の通りである。一方、ステップS5において、量子化幅QPが閾値未満である場合、ステップS9に進む。なお、ステップS2からステップS6の一連の処理は、直交係数行列解析工程に相当する。
ステップS7においてゼロ部分行列が括り出せると判定された場合、ステップS8に進み、DCT係数行列からゼロ部分行列を除いた部分行列の要素として配置されている量子化されたDCT係数について、逆量子化処理が行われる。続いてステップS9において、DCT係数行列からゼロ部分行列を除いた部分行列に関して逆直交変換処理であるIDCT処理が行われ、差分画像データが生成される。
一方、ステップS7においてゼロ部分行列が括り出せないと判定された場合、及び、ステップS6において量子化幅QPが閾値未満である場合、ステップS10に進み、量子化された全てのDCT係数について、逆量子化処理が行われる。続いてステップS11において、DCT係数行列に関して通常のIDCT処理が行われ、差分画像データが生成される。
次に、ステップS12において、ステップS9もしくはステップS11において生成された差分画像データに予測画像が加算され、再生画像データが生成される。最後に、再生画像データにデブロッキング処理が施されて復号動画像データが生成され、本実施の形態における動画像復号処理を終了する。
このように、本実施の形態においては、量子化幅QPが予め設定された閾値以上である場合にのみ、DCT係数行列からゼロ部分行列の括り出し可否の判定や括り出し処理を行うようにしたので、ゼロ部分行列が括り出せないようなDCT係数行列からなる符号データを復号する場合、ゼロ部分行列の括り出しの判定処理のための余分な演算がなされることがなく、演算量の削減、および処理コストの低減が可能となる。また、ゼロ部分行列が括り出せる場合には、DCT係数行列からゼロ部分行列を括り出した残りの部分行列についてのみ逆量子化処理やIDCT処理を行うようにしたので、DCT係数行列の全要素について演算する場合に比べて演算量を削減することができ、処理コストを低減することができる。
なお、本実施の形態においては、復号される動画像がIピクチャとPピクチャの場合について説明したが、復号する動画像としてBピクチャ(Bi-directionally Predictive-Picture)が入力されている場合にも適用可能である。
1…動画像復号装置、2…エントロピー復号部、3…DCT係数行列解析部、4…逆量子化部、5…IDCT部、6…加算部、7…デブロッキングフィルタ部、8…画面内予測部、9…フレームメモリ、10…画面間予測部、11…スイッチ。
Claims (5)
- 入力動画像を表す画素データをM×N画素からなるブロックごとに直交変換して得られる変換係数からなるM行N列の係数行列において、量子化された複数の前記変換係数に関する情報を用いてゼロ以外の値を有する前記変換係数が最後に出現する位置を検出することにより、ゼロ行列部分が存在するか否かを判定する直交係数行列解析部と、
前記量子化された前記変換係数を逆量子化し、前記変換係数を算出する逆量子化部と、
前記変換係数を逆直交変換して前記画素データを算出する逆直交変換部とを備え、
前記直交係数行列解析部は、前記変換係数の量子化幅が所定の閾値を超えた場合にのみ、前記係数行列において前記ゼロ行列部分が存在するか否かを判定し、
前記逆直交変換部は、前記ゼロ行列部分が存在する場合は、前記係数行列から前記ゼロ行列部分を除いた残りの部分行列についてのみ、前記逆直交変換を行うことを特徴とする動画像復号装置。 - 入力動画像を表す画素データをM×N画素からなるブロックごとに直交変換して得られる変換係数からなるM行N列の係数行列において、量子化された複数の前記変換係数に関する情報を用いてゼロ以外の値を有する前記変換係数が最後に出現する位置を検出することにより、ゼロ行列部分が存在するか否かを判定する直交係数行列解析工程と、
前記量子化された変換係数を逆量子化し、前記変換係数を算出する逆量子化工程と、
前記変換係数を逆直交変換して前記画素データを算出する逆直交変換工程とを備え、
前記直交係数行列解析工程は、前記変換係数の量子化幅が所定の閾値を超えた場合にのみ、前記係数行列において前記ゼロ行列部分が存在するか否かを判定し、
前記逆直交変換工程は、前記ゼロ行列部分が存在する場合は、前記係数行列から前記ゼロ行列部分を除いた残りの部分行列についてのみ、前記逆直交変換を行うことを特徴とする、動画像復号方法。 - 前記逆量子化工程は、前記係数行列において前記ゼロ行列部分が存在する場合には、前記係数行列から前記ゼロ行列部分を除いた残りの部分行列についてのみ、前記量子化を行うことを特徴とする、請求項2に記載の動画像復号方法。
- 前記直交係数行列解析工程は、前記係数行列において前記ゼロ行列部分が存在するか否かの判定基準となる前記閾値を、前記入力動画像が画面内予測を用いて符号化された場合と画面間予測を用いて符号化された場合とで、異なる値を用いることができることを特徴とする、請求項2または請求項3に記載の動画像復号方法。
- 前記直交係数行列解析工程は、前記量子化された変換係数に関するエントロピー符号化情報に基づき、前記量子化された複数の変換係数に関する情報を用いてゼロ以外の値を有する前記変換係数が最後に出現する位置を検出することを特徴とする、請求項2から請求項4のいずれか一項に記載の動画像復号方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006135808A JP2007306528A (ja) | 2006-05-15 | 2006-05-15 | 動画像復号装置および動画像復号方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006135808A JP2007306528A (ja) | 2006-05-15 | 2006-05-15 | 動画像復号装置および動画像復号方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007306528A true JP2007306528A (ja) | 2007-11-22 |
Family
ID=38840052
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006135808A Pending JP2007306528A (ja) | 2006-05-15 | 2006-05-15 | 動画像復号装置および動画像復号方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007306528A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017509961A (ja) * | 2014-01-29 | 2017-04-06 | レイセオン カンパニー | サブピクセルオフセットを有する電子ズーム方法 |
-
2006
- 2006-05-15 JP JP2006135808A patent/JP2007306528A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017509961A (ja) * | 2014-01-29 | 2017-04-06 | レイセオン カンパニー | サブピクセルオフセットを有する電子ズーム方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2706236C1 (ru) | Устройство кодирования изображений, способ кодирования изображений, устройство декодирования изображений, способ декодирования изображений и носитель хранения данных | |
| US10455210B2 (en) | Method, medium, and apparatus encoding and/or decoding an image using the same coding mode across components | |
| EP2241112B1 (en) | Encoding filter coefficients | |
| US9462271B2 (en) | Moving image encoding device, moving image decoding device, moving image coding method, and moving image decoding method | |
| US20100177819A1 (en) | Method and an apparatus for processing a video signal | |
| KR20120043661A (ko) | 적응적 화면내 예측 부호화 및 복호화 방법 | |
| CN101933331A (zh) | 视频编码装置、视频解码装置、视频编码方法、视频解码方法、视频编码或解码程序 | |
| JPH1175186A (ja) | スケーリングされた順方向および逆方向の離散コサイン変換と、これを使用するビデオ圧縮伸長システム | |
| KR20160091392A (ko) | 이미지를 인코딩하고 디코딩하기 위한 방법, 이미지를 인코딩하고 디코딩하기 위한 디바이스 및 상응하는 컴퓨터 프로그램 | |
| JPH0487460A (ja) | 画像処理装置 | |
| US20120155534A1 (en) | Image Decoding Apparatus, Image Decoding Method and Computer Readable, Non-Transitory Storage Medium | |
| TWI833620B (zh) | 圖像編碼裝置、圖像編碼方法、圖像解碼裝置及圖像解碼方法 | |
| JP2007306528A (ja) | 動画像復号装置および動画像復号方法 | |
| JP6992825B2 (ja) | 映像符号化装置、映像符号化方法、映像復号装置、映像復号方法、及び映像符号化システム | |
| KR100230841B1 (ko) | 동영상 복호기의 블록화 현상 제거 방법 및 그 장치(Method of and Device for eliminating blocking effect in a motion picture decoder) | |
| JP2791410B2 (ja) | 圧縮画像データ抽出装置 | |
| CN101110955B (zh) | 用于恢复图像的设备和方法 | |
| CN111164975A (zh) | 图像数据编码和解码 | |
| JP3200073B2 (ja) | 画像処理装置 | |
| KR101081971B1 (ko) | 스케일링 기능을 포함하는 jpeg 디코더 및 그의 스케일링 방법 | |
| JP2006101397A (ja) | 動画像符号化装置及び動画像符号化プログラム | |
| KR20110055358A (ko) | 비디오 신호의 처리 및 방법 | |
| JP2006180059A (ja) | 画像処理装置 |