JP2008051602A - 測定装置 - Google Patents
測定装置 Download PDFInfo
- Publication number
- JP2008051602A JP2008051602A JP2006226827A JP2006226827A JP2008051602A JP 2008051602 A JP2008051602 A JP 2008051602A JP 2006226827 A JP2006226827 A JP 2006226827A JP 2006226827 A JP2006226827 A JP 2006226827A JP 2008051602 A JP2008051602 A JP 2008051602A
- Authority
- JP
- Japan
- Prior art keywords
- stylus
- displacement
- workpiece
- light
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q20/00—Monitoring the movement or position of the probe
- G01Q20/02—Monitoring the movement or position of the probe by optical means
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【解決手段】測定時において、ワーク20に対して位置及び姿勢が変化しないように保持された基準部材12と、該ワーク20表面を走査しながら、該ワーク20表面の凹凸に応じて上下方向に変位するスタイラス14と、該スタイラス14の特定部位36の変位を該基準部材12との比較において測定する変位計16と、該スタイラス14を該ワーク20表面に沿って走査させる走査手段18と、を備え、該基準部材12は該走査によっても該ワーク20に対する位置及び姿勢が変化せず、該スタイラス14の特定部位36の上下方向への変位を該基準部材12を基準にして測定し、該測定されたスタイラス14の特定部位36の変位に基づき該ワーク20の微細な形状を把握することを特徴とする測定装置10。
【選択図】図1
Description
装置が用いられている。走査プローブ顕微鏡としては、例えば原子間力顕微鏡等があり、これは、ワーク表面とスタイラス間に働く原子間力を検出し、これが一定になるようにワーク表面を走査することにより、ワーク表面の凹凸を把握するものである。(例えば特許文献1参照)。
、例えばレーザ及び位置検出可能な光センサを用いた光てこ方式(例えば特許文献1,2
参照)、フォーカス誤差検出方式による測定(例えば特許文献3参照)、光ファイバー干渉
計による測定(例えば特許文献4,5参照)等がある。
また、光センサの光強度信号が常に所定値となるようにワーク表面を相対的に上下移動させつつワーク表面を走査することにより、ワーク表面上の高さを計測することができる。 微細形状測定装置によれば、このようにしてワーク表面上の高さを把握することにより、ワークの1ラインないし2次元エリアの微細形状を測定することができる。
このような要望に応えるため、種々の測定装置が提案されており、例えば、特許文献4では、案内機構の捻じれ等の測定精度への悪影響を低減するため、測定子に直角三面反射体を設け、該直角三面反射体の変位量を、複数の変位計で測定することにより、測定子の変位量を把握する技術が提案されている。
そして、この点について検討の結果、本発明者らによれば、以下の点がわかった。すなわち、ワーク上を走査して測定を行った際、高さを感知するセンサによって得られるデータは、カンチレバーがワークの形状に応じて上下した量と、走査手段で発生する運動誤差によってカンチレバーが上下した量との合算値であることがわかった。
しかしながら、運動誤差がない理想的な走査手段を用意すること自体、極めて困難である。また仮に、このような走査手段を用意できたとしても、極めて高価なものとなるので、低価格な装置製作が困難となる。
したがって、より高精度な走査手段の使用は、本発明の課題解決手段として採用するに至らなかった。
あるいは、走査手段で発生する運動誤差の影響を排除することが可能と提案されている方法でも、特許文献に示されているように直角三面反射体を用いた複雑な装置構成にしなければならなかった。
このように、微細形状測定の分野では、より高精度な走査手段を用いることなく、測定の高精度化を実現することのできる技術の開発が強く求められていたものの、従来は、これを解決することのできる適切な技術が存在しなかった。
すなわち、前記目的を達成するために本発明にかかる測定装置は、基準部材と、スタイラスと、変位計と、走査手段と、を備えることを特徴とする。
ここで、前記基準部材は、測定時において、ワークに対して位置と姿勢とが変化しないように保持されたものとする。
また、前記スタイラスは、前記ワーク表面を走査する。
前記変位計は、前記スタイラスの特定部位の変位を、前記基準部材との比較において測定する。
前記走査手段は、前記スタイラスをワーク表面に沿って走査させる。
そして、前記基準部材は、前記走査によっても、該ワークに対する位置及び姿勢が変化せず、
前記スタイラスの特定部位の上下方向の変位は、前記基準部材を基準にして測定され、
該測定されたスタイラスの特定部位の変位に基づき、前記ワークの微細な形状が把握される。
なお、本発明においては、前記走査手段が、測定時において、前記スタイラスの上下方向への変位方向である変位軸線と、前記変位計が該スタイラスの特定部位の変位を測定する測定軸線とが常に一致するように、該スタイラス及び該変位計に対する該ワーク及び該基準部材の走査を行うこと、又は該ワーク及び該基準部材に対する該スタイラス及び該変位計の走査を行うことが好ましい。すなわち、これにより、アッベの誤差の発生を確実に防ぐことができるので、高精度な測定が行えるからである。
また、本発明において、前記変位計は、光波干渉式変位計であり、
前記基準部材は、前記光波干渉式変位計の参照鏡であり、
少なくとも前記参照鏡及び前記スタイラスの特定部位を、前記変位軸線上及び前記測定軸線上に配置し、
前記光波干渉式変位計は、前記変位軸線及び前記測定軸線と一致する中心軸を有する可干渉光の一部を前記参照鏡に入射して得られた該参照鏡での反射光と、該参照鏡を透過し該スタイラス特定部位に入射して得られた該スタイラス特定部位での反射光とを該参照鏡で干渉させ、その干渉に基づき該スタイラスの特定部位の変位を測定することが好適である。
ここで、前記集光レンズは、前記参照鏡からの可干渉光を前記スタイラスの特定部位に収束させ、その反射光を集光して前記測定軸線上において真上に射出する。
ここで、前記遮光板は、前記集光レンズ透過光以外の光を遮断する。
また、本発明において、前記変位計は、二の平面電極を備えた静電容量式変位計であり、
前記基準部材は、該二の平面電極の内の一方の平面電極であり、該二の平面電極の内の他方の平面電極は、該スタイラスの特定部位に設けられており、
該静電容量式変位計が、該二の平面電極間の静電容量を測定し、該測定された静電容量に基づき、該スタイラスの特定部位の変位を測定することが好適である。
ここで、前記静電遮蔽板は、前記スタイラスの特定部位以外の静電容量を遮蔽する。
すなわち、これにより、前記基準部材に対する前記スタイラスの特定部位の変位のみを測定することができるからである。
本発明においては、前記基準部材が、前記ワークの測定領域以上のサイズを有することが好適である。本発明においては、基準部材のサイズが、ワークの測定領域と同程度のサイズであることが特に好ましい。すなわち、基準部材のサイズが、ワークの測定領域よりも小さいと、基準部材を基準に、スタイラスの変位を測定することのできない測定領域が生じるおそれがあるからである。基準部材のサイズが、少なくともワークの測定領域と同程度のサイズであることにより、基準部材を基準に、スタイラスの変位測定を確実に行うことができるからである。
本発明においては、前記スタイラスが、可撓性を有するカンチレバーの自由端に設けられており、前記ワークに接触した状態で上下方向に変位することが好適である。すなわち、
運動誤差が生じても、スタイラスがワークに接触した状態であれば、運動誤差がカンチレバーの撓みで吸収され、スタイラスの特定部位の高さに影響を与えることがないので、ワーク表面の凹凸のみに応じたスタイラスの変位を高精度に測定することができるからである。
また、本発明においては、走査手段が、スタイラスの測定軸線と変位計の測定軸線とを常に一致させた状態で、走査を行うので、より高精度な測定を行うことができる。
本発明においては、さらに、集光レンズをスタイラスと共に走査することにより、前記測定を、より高精度に行うことができる。
本発明においては、前記集光レンズを可干渉性を有する平行光束中を走査し、また、集光レンズ透過光以外の光を遮断する遮光板を備えることにより、前記測定を、より高精度に行うことができる。
本発明においては、さらに、前記静電遮蔽板を備えることにより、前記測定を、より高精度に行うことができる。
本発明においては、前記スタイラスが前記カンチレバーに設けられていることにより、前記測定を、より高精度に行うことができる。
第一実施形態
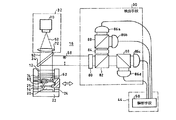
図1には本発明の一実施形態にかかる測定装置の概略構成が示されている。同図(A)は該測定装置の斜視図、同図(B)は該測定装置を側方より見た図である。
同図に示す微細形状測定装置(測定装置)10は、参照鏡(基準部材)12と、スタイラス14と、光波干渉式変位計(変位計)16と、走査手段18と、を備える。
また、スタイラス14は、可撓性を有するカンチレバー21の自由端に設けられている。カンチレバー21の他端が走査手段18に設けられている。スタイラス14は、ワーク20上をX方向に走査されながら、ワーク20表面のZ方向の凹凸をなぞる。
光波干渉式変位計16は、干渉光学系28と、検出手段30と、を備える。干渉光学系28は、光射出手段32と、ビームスプリッタ34と、を備える。本実施形態においては、ビームスプリッタ34、参照鏡12、スタイラス14の特定部位36、及びスタイラス14の先端を一直線上に配置している。光波干渉式変位計16は、スタイラス14の特定部位36の変位を、その真上から、基準部材12との比較において測定する。本実施形態においては、水平状態にあるカンチレバー21の背面においてスタイラス14の中心軸上に位置するところを特定部位36としている。
本実施形態においては、走査手段18が、走査時に、スタイラス14の特定部位36のZ方向への変位軸線38と、光波干渉式変位計16がスタイラス14の特定部位36のZ変位を測定する測定軸線40とを常に一致させた状態で、走査を行っている。
このために本実施形態は、前記走査手段18と、Z軸駆動手段42と、コンピュータ44と、を備える。コンピュータ44は、XY軸駆動回路46と、Z軸駆動回路48と、解析手段50と、を備える。
同図においては、走査時において、スタイラス14の変位軸線38と、変位計16の測定軸線40とを常に一致させた状態で、カンチレバー21のスタイラス14でワーク20の表面をなぞりながら、スタイラス14の特定部位36のZ変位量を測定している。
すなわち、同図においては、光射出手段32からの平行光束であるレーザ(可干渉光)52は、ビームスプリッタ34を透過し、参照鏡12に入射する。
参照鏡12に入射したレーザ52の一部は、該参照鏡12で真上に反射される。本実施形態では、参照鏡12での反射光を参照光54という。また、該レーザ52の残りの少なくとも一部が、参照鏡12を透過し、スタイラス14の特定部位36に入射される。スタイラス14の特定部位36に入射したレーザ52は、真上に反射され、参照鏡12に至る。本実施形態では、スタイラス14の特定部位36での反射光を測定光56という。
参照鏡12では、参照光54と測定光56とが干渉する。この干渉信号58は、ビームスプリッタ34で反射され、検出手段30で観測される。この干渉信号58は、スタイラス14の特定部位36のZ変位に応じて、干渉強度変化(明暗)を示す。このような干渉強度情報(明暗情報)をもつ干渉信号58が検出手段30で光電変換される。このため検出手段30の出力は、スタイラス14の特定部位36のZ変位に応じて、つまり前記干渉強度の変化に応じて、変化する。この結果、解析手段50は、検出手段30の出力変化に含まれる干渉強度変化を解析することにより、スタイラス14の特定部位36のZ変位を測定することができる。
この結果、本実施形態においては、走査時は常に、スタイラス14の特定部位36の変位を、その真上から測定することができる。このため、本実施形態においては、コサイン誤差の発生を大幅に低減することができるので、スタイラス14の高精度な変位測定を行うことができる。
この結果、本実施形態においては、カンチレバー21の走査時に運動誤差が生じた場合であっても、スタイラス14がワーク20の表面に接触している状態であれば、カンチレバー21に撓みが生じるだけで、該運動誤差がワーク20の測定結果に重畳されるのを防ぐことができる。このため、本実施形態においては、スタイラス14の高精度な変位測定を行うことができる。
同図は、ワーク20に対して固定で設置した参照鏡12での反射光である参照光54と、スタイラス14の特定部位36での反射光である測定光56とを干渉させ、その干渉に基づき、カンチレバー21走査時の特定部位36のZ変位を観測する様子を示している。なお、同図において、点線は走査前の様子、実線は走査後の様子を示している。
同図に示されるように、本実施形態では、点線から実線位置にかけてカンチレバー21を走査する場合、変位観測位置も点線位置から、実線で示したように移動させている。
本実施形態では、スタイラス14がワーク20に対して接している状況においては、ワーク20の形状凹凸量と、カンチレバー21の背面上下量(特定部位36の上下量)は一致するため、参照鏡12に対する正確な変位測定を行うことができる。
本実施形態においては、実際のところ、カンチレバー21のスタイラス14をワーク20の表面に軽く押し当てた状態で、ワーク20上を走査することを想定している。
この場合、走査手段18の運動誤差は、カンチレバー21の根元部分の上下動での影響が及ぼされる。
しかしながら、このような運動誤差が、カンチレバー21の撓みの範囲内であれば、スタイラス14がワーク20の表面から離れることはない。
したがって、本実施形態では、走査手段18の運動誤差があっても、スタイラス14がワーク20から離れなければ、ワーク20の形状を正確に測定することができる。このために本実施形態においては、スタイラス14を、可撓性を有するカンチレバー21の自由端に設けることが特に好ましい。
これに対し、一般的な測定装置においては、ワーク上の凹凸に伴う変位に加えて、走査手段の運動誤差に伴う変位分が、Z変位の測定結果に加算されてしまう。走査手段の運動誤差は、センサないしワークの走査手段の案内面の精度や、該案内面に対して該センサないしワークがどのように動いたかに依存する。このため、従来方式による測定の不確かさは、本発明に比較し非常に大きなものとなる。また、別の従来方式、つまり案内の運動誤差の影響を低減するため、複数の変位計を設けたのでは、スタイラスの変位軸線とは異なる測定軸線上で変位測定が行われるため、コサイン誤差が発生する。
このような点から、本実施形態は、従来方式に比較し、より高精度な測定を行うことができる。
同図に示す光学系構成部材は、参照鏡12とスタイラス14の特定部位36との間に設けられ、スタイラス14と共にX方向に走査される集光レンズ60を含む。この集光レンズ60は、平行光束であるレーザ52をスタイラス14の特定部位36に収束させ、その焦点位置でスタイラス14の特定部位36の変位を観測するためのものである。すなわち、集光レンズ60は、参照鏡12からのレーザ52をスタイラス14の特定部位36に収束させ、かつ該スタイラス14の特定部位36からの反射光を測定光56として集光し、その真上に、つまり測定軸線40上に射出している。
特に本実施形態においては、より高精度な光波干渉測定を行うため、集光レンズ60が、レーザ52、つまりZ方向の平行光束の中において、X方向へ走査されることも好ましい。
この結果、本実施形態においては、スタイラス14の撓みによるカンチレバー21背面(特定部位36)の傾き変化の影響が懸念されるような場合であっても、図4に示されるようにスタイラス14の特定部位36での反射光である測定光56は集光レンズ60により確実に集光され、これをスタイラス14の真上から確実に観測することができるので、正確に変位測定を行うことができる。
ここで、遮光板62は、集光レンズ60透過光以外の光を遮断する。
本実施形態においては、集光レンズ60透過光以外の光を遮断することにより、スタイラス14の特定部位36のみを、より確実に測定することができる。
本実施形態においては、このような光学系構成部材を設けることにより、走査手段18の運動誤差があっても、その運動誤差がスタイラス14がワーク20から離れない範囲内であれば、カンチレバー21背面(特定部位36)の傾斜による測定誤差を幾何学的にキャンセルし、スタイラス14の変位を正確に測定することができる。
なお、本発明は前記各構成に限定されるものでなく、発明の要旨の範囲内であれば、種々の変更、例えば追加、置換等が可能である。
すなわち、同図においては、レーザ52をワーク20の測定領域相当の大きさの平行光として参照鏡12に入射させる。参照鏡12を透過したレーザ52の一部は、集光レンズ60で収束されてスタイラス14の特定部位36に入射する。スタイラス14の特定部位36での反射光である測定光56は集光レンズ60で集光され、参照鏡12に至り、参照鏡12での反射光である参照光54と干渉される。これにより、前記図1,3に示した構成に比較し、可動部分のサイズや重量を減らすことができるので、走査手段の製作の自由度が高まる。
同図において、光射出手段32は、レーザ光源70と、コリメータレンズ72と、を備えている。
そして、同図においては、レーザ光源70からのレーザ52をコリメータレンズ72により、ビームスプリッタ34の大きさに応じた所定の径を有する平行光束にする。これをレーザ52として、無偏光ビームスプリッタ34を透過させ、参照鏡12に入射させる。参照鏡12を透過したレーザ52は、レンズ60で絞られ、スタイラス14の特定部位36に照射される。スタイラス14の特定部位36での反射光である測定光56は、レンズ60で集光され、参照鏡12に至る。参照鏡12では、この測定光56を参照鏡12での反射光である参照光54と重ね合わせ、干渉させる。この干渉信号58は、ビームスプリッタ34で反射され、検出手段30で検出される。検出手段30は、受光された干渉信号58の強度変化に応じて信号レベルが変化する電気信号を出力する。
すなわち、同図においては、無偏光ビームスプリッタ34からの透過光を、参照鏡12で参照光54と透過光とに分割している。この透過光は光学素子74を透過すると、偏光面が回転し、レンズ60を透過する。レンズ60は、透過光を収束させてスタイラス14の特定部位36に入射させる。特定部位36での反射光である測定光56を、レンズ60、光学素子74及び参照鏡12を透過させ、参照鏡12では、参照光54と測定光56とを取り出す。取り出された参照光54と測定光56とは、偏光面が互いに直交した光となり、これらの位相差の変化を観測することにより、スタイラス14の特定部位36のZ変位がわかるため、ワーク20の参照鏡12に対する相対的な形状を測定することができる。
また、光学素子74が透過と反射とが偏光によって分離されるもの、例えばワイヤーグリッド偏光板の場合は、参照光54と測定光56の偏光を直交させてもよい。この場合、透過光を前記測定光56とし、反射光をそのまま前記参照光54として使用することにより、光学素子74は図1に示した参照鏡12の機能も兼ね備えるので、光学素子74及び参照鏡12を、一の光学素子74で実現することができる。
同図において、検出手段30は、λ/2板80と、無偏光ビームスプリッタ82と、λ/4板84と、光センサ86a〜86dと、偏光ビームスプリッタ88と、を備える。
解析手段50では、このようにして得られた4つの干渉信号から、参照光と測定光との位相差を算出するため、0°と180°、90°と270°との間で、それぞれ差をとり、その結果を除算し、逆正接をとる。
このようにして算出された参照光と測定光との位相差に基づきスタイラス14の特定部位36のZ変位を求めることができるので、該スタイラス14のZ変位に基づきワーク20上の凹凸を把握することができる。
前記構成では、走査手段18が、スタイラス14の変位軸線38と変位計16の測定軸線40とを一致させた状態で、ワーク20及び参照鏡12に対し、スタイラス14及び変位計16を、X方向に送り移動した例について説明したが、本発明は、これに限定されるものでなく、図7に示されるように、スタイラス14及び変位計16に対し、ワーク20及び参照鏡12を、X方向に送り移動することも好ましい。
また、X軸方向の1軸のみならず、Y方向にも同様の走査測定を行い、2次元領域での対象物の凹凸形状を測定できることは、言うまでもない。
前記構成では、変位計として、光波干渉式のものを用いた例について説明したが、静電容量式のものを用いることもできる。
図8には静電容量式変位計を用いた測定装置の概略構成が示されている。前記第一実施形態と対応する部分には符号100を加えて示し説明を省略する。
本実施形態では、変位計が、静電容量式変位計116である。静電容量式変位計116は、平行に対向した接地側平面電極(基準部材)112及び検出側平面電極192と、管制部194と、を備える。
すなわち、本実施形態においては、基準部材が接地側平面電極112である。検出側平面電極192が、スタイラス114の特定部位136に設けられている。
そして、静電容量式変位計116が、平面電極112,192間の静電容量を測定し、該静電容量情報を含む静電容量信号158を出力する。静電容量信号158はコンピュータ144に入力される。コンピュータ144は、静電容量信号158に含まれる静電容量情報に基づき、スタイラス114の特定部位136のZ変位を把握し、Z変位に基づきスタイラス144のZ変位を把握する。
静電遮蔽板162は、遮蔽部195と、通過部196と、を備える。
遮蔽部195は、接地側平面電極112とスタイラス114の特定部位136間以外の静電容量を遮蔽する。
通過部196は、接地側平面電極112とスタイラス114の特定部位136間のみの静電容量を通過して、変位計116で測定するためのものとする。
同図に示されるように、ワーク120及び接地側平面電極112に対し、スタイラス114及び静電遮蔽板162をX方向に走査することにより、スタイラス114でワーク120の表面がなぞられ、スタイラス114がワーク120の表面の凹凸にそってZ方向に変位する。
このとき、スタイラス114と共に検出側平面電極192がZ方向に変位し、平面電極112,192間の距離が変化するので、該平面電極間192,112間の静電容量も変化する。
このため変位計116で、平面電極112,192間の静電容量を測定することにより、該平面電極112,192間の距離を求めることができる。
ここで、面積S、誘電率εが一定であれば、距離Lは、静電容量Cに反比例する。したがって、平面電極112,192間の静電容量の変化を測定することにより、電極112,192間の距離Lの変化、つまり接地側平面電極112を基準に検出側平面電極192のZ変位を求めることができる。
また、本実施形態は、静電遮蔽板162の遮蔽部195により、スタイラス114の特定部位136以外の静電容量を遮蔽している。そして、静電遮蔽板162の通過部136により、スタイラス114の特定部位136のみの静電容量を測定している。このため、静電容量式変位計116が、基準部材である接地側平面電極112に対するスタイラス114の特定部位136のZ変位のみを高精度に測定することができる。
しかも本実施形態は、前記第一実施形態と同様、基準部材を基準に、スタイラス114の変位測定を行うので、走査手段118やZ軸駆動手段142等のアクチュエータに運動誤差があっても、その影響を大幅に低減し、高精度な変位測定を行うことができる。
また、本実施形態は、前記第一実施形態と同様、走査手段118やZ軸駆動手段142等のアクチュエータの高精度化を図ることなく、より高精度な測定を行うことができるので、低コストとなる。
12 参照鏡(基準部材)
14 スタイラス
16 光波干渉式変位計(変位計)
18 走査手段
21 カンチレバー
110 微細形状測定装置(測定装置)
112 接地側平面電極(基準部材)
114 スタイラス
116 静電容量式変位計(変位計)
118 走査手段
121 カンチレバー
Claims (9)
- 測定時において、ワークに対して位置と姿勢とが変化しないように保持された基準部材と、
前記ワーク表面を走査しながら、該ワーク表面の凹凸に応じて上下方向に変位するスタイラスと、
前記スタイラスの特定部位の変位を、前記基準部材との比較において測定する変位計と、
前記スタイラスを前記ワーク表面に沿って走査させる走査手段と、
を備え、前記基準部材は、前記走査によっても、該ワークに対する位置及び姿勢が変化せず、
前記スタイラスの特定部位の上下方向の変位を、前記基準部材を基準にして測定し、
該測定されたスタイラスの特定部位の変位に基づき、前記ワークの微細な形状を把握することを特徴とする測定装置。 - 請求項1記載の測定装置において、
前記走査手段は、測定時において、前記スタイラスの上下方向への変位方向である変位軸線と、前記変位計が該スタイラスの特定部位の変位を測定する測定軸線とが常に一致するように、該スタイラス及び該変位計に対する該ワーク及び該基準部材の走査を行うこと、又は該ワーク及び該基準部材に対する該スタイラス及び該変位計の走査を行うことを特徴とする測定装置。 - 請求項1又は2記載の測定装置において、
前記変位計は、光波干渉式変位計であり、
前記基準部材は、前記光波干渉式変位計の参照鏡であり、
少なくとも前記参照鏡及び前記スタイラスの特定部位を、前記スタイラスの変位軸線上及び前記変位計の測定軸線上に一致させ、
前記光波干渉式変位計は、前記変位軸線及び前記測定軸線と一致する中心軸を有する可干渉光の一部を前記参照鏡に入射して得られた該参照鏡での反射光と、該参照鏡を透過し該スタイラス特定部位に入射して得られた該スタイラス特定部位での反射光とを該参照鏡で干渉させ、その干渉に基づき該スタイラスの特定部位の変位を測定することを特徴とする測定装置。 - 請求項3記載の測定装置において、
さらに、前記参照鏡からの可干渉光を前記スタイラスの特定部位に収束させ、その反射光を集光して前記測定軸線上において真上に射出する集光レンズを備え、
前記集光レンズを、前記スタイラスと共に横方向に走査することを特徴とする測定装置。 - 請求項4記載の測定装置において、
前記集光レンズは、平行光束である前記可干渉光中を横方向に走査され、
さらに、前記集光レンズ透過光以外の光を遮断する遮光板を備えることを特徴とする測定装置。 - 請求項1又は2記載の測定装置において、
前記変位計は、二の平面電極を備えた静電容量式変位計であり、
前記基準部材は、前記二の平面電極のうちの一方の平面電極であり、
前記二の平面電極のうちの他方の平面電極は、前記スタイラスの特定部位に設けられており、
前記静電容量式変位計が、前記二の平面電極間の静電容量を測定し、該測定された静電容量に基づき前記スタイラスの特定部位の変位を測定することを特徴とする測定装置。 - 請求項6記載の測定装置において、
さらに、前記基準部材と前記スタイラスの特定部位間のみの静電容量を測定するための静電遮蔽板を備えることを特徴とする測定装置。 - 請求項1〜7のいずれかに記載の測定装置において、
前記基準部材は、前記ワークの測定領域以上のサイズを有することを特徴とする測定装置。 - 請求項1〜8のいずれかに記載の測定装置において、
前記スタイラスは、可撓性を有するカンチレバーの自由端に設けられており、前記ワークに接触した状態で上下方向に変位することを特徴とする測定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006226827A JP5122775B2 (ja) | 2006-08-23 | 2006-08-23 | 測定装置 |
| EP07016505.5A EP1892727B1 (en) | 2006-08-23 | 2007-08-22 | Shape measuring apparatus using an interferometric displacement gauge |
| US11/892,365 US7681439B2 (en) | 2006-08-23 | 2007-08-22 | Measuring apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006226827A JP5122775B2 (ja) | 2006-08-23 | 2006-08-23 | 測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008051602A true JP2008051602A (ja) | 2008-03-06 |
| JP5122775B2 JP5122775B2 (ja) | 2013-01-16 |
Family
ID=38626370
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006226827A Expired - Fee Related JP5122775B2 (ja) | 2006-08-23 | 2006-08-23 | 測定装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7681439B2 (ja) |
| EP (1) | EP1892727B1 (ja) |
| JP (1) | JP5122775B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009229078A (ja) * | 2008-03-19 | 2009-10-08 | Mitsutoyo Corp | 形状測定装置 |
| JP2011522273A (ja) * | 2008-06-06 | 2011-07-28 | インフィニテシマ・リミテッド | プローブ検出システム |
| JP2012002631A (ja) * | 2010-06-16 | 2012-01-05 | Mitsutoyo Corp | 光干渉測定装置および形状測定装置 |
| JP2012511715A (ja) * | 2008-12-11 | 2012-05-24 | インフィニテシマ・リミテッド | 動的なプローブ検出システム |
| JP2012184959A (ja) * | 2011-03-03 | 2012-09-27 | Sii Nanotechnology Inc | 変位検出機構およびそれを用いた走査型プローブ顕微鏡 |
| DE102013009175A1 (de) | 2012-05-31 | 2013-12-05 | Mitutoyo Corporation | Profilmessinstrument |
| JP2014166675A (ja) * | 2013-01-29 | 2014-09-11 | Mitsutoyo Corp | パラレル機構 |
| KR101529607B1 (ko) * | 2013-11-18 | 2015-06-19 | 한국표준과학연구원 | 탐침현미경, 이를 이용한 탐침현미경의 정렬방법, 기록매체 및 정렬 시스템 |
| JP2015172597A (ja) * | 2015-06-02 | 2015-10-01 | 株式会社日立ハイテクサイエンス | 変位検出機構およびそれを用いた走査型プローブ顕微鏡 |
| DE102016013550B3 (de) | 2016-11-08 | 2018-04-19 | Rolf Klöden | Profilmesssystem für eine Rauheits- und Konturmessung an einer Oberfläche eines Werkstücks |
| WO2022004102A1 (ja) * | 2020-06-30 | 2022-01-06 | トタニ技研工業株式会社 | 欠陥検出装置、および、製袋機 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE602005009540D1 (de) * | 2005-09-30 | 2008-10-16 | Max Planck Gesellschaft | Optische Vorrichtung zur Messung von modulierten Lichtsignalen |
| JP5183989B2 (ja) * | 2007-07-19 | 2013-04-17 | 株式会社ミツトヨ | 形状測定装置 |
| TWI364540B (en) * | 2007-12-28 | 2012-05-21 | Ind Tech Res Inst | Cantilever sensor system and profilers and biosensors using the same |
| US20120320364A1 (en) * | 2009-12-14 | 2012-12-20 | Volvo Aero Corporation | Device and a method for determining a distance to a surface of a workpiece and an arrangement and a method for effecting a workpiece |
| JP5504068B2 (ja) * | 2010-06-23 | 2014-05-28 | Dmg森精機株式会社 | 変位検出装置 |
| SG192224A1 (en) | 2011-01-31 | 2013-09-30 | Infinitesima Ltd | Adaptive mode scanning probe microscope |
| GB201218350D0 (en) | 2012-10-12 | 2012-11-28 | Infinitesima Ltd | Multiple probe actuation |
| GB201215546D0 (en) | 2012-08-31 | 2012-10-17 | Infinitesima Ltd | Multiple probe detection and actuation |
| WO2014083358A1 (en) | 2012-11-29 | 2014-06-05 | Infinitesima Limited | Probe calibration or measurement routine |
| EP2913681A1 (en) | 2014-02-28 | 2015-09-02 | Infinitesima Limited | Probe system with multiple actuation locations |
| EP2913682A1 (en) | 2014-02-28 | 2015-09-02 | Infinitesima Limited | Probe actuation system with feedback controller |
| US10401381B2 (en) | 2015-06-12 | 2019-09-03 | Infinitesima Limited | Scanning probe system |
| JP6392395B1 (ja) * | 2017-03-26 | 2018-09-19 | 株式会社アドテックエンジニアリング | 平面度測定方法及びピン高さ調整方法 |
| GB201705613D0 (en) | 2017-04-07 | 2017-05-24 | Infinitesima Ltd | Scanning probe system |
| JP6738883B2 (ja) * | 2018-11-28 | 2020-08-12 | 株式会社ミツトヨ | プローブユニット及び測定システム |
| CN111351464A (zh) * | 2018-12-20 | 2020-06-30 | 鸿富锦精密电子(郑州)有限公司 | 平整度检测装置及方法 |
| KR20240089305A (ko) | 2021-10-07 | 2024-06-20 | 인피니트시마 리미티드 | 프로브를 사용하여 샘플을 스캔하기 위한 방법 및 장치 |
| EP4339624A1 (en) | 2022-09-15 | 2024-03-20 | Infinitesima Limited | Image data segmentation |
| GB202304777D0 (en) | 2023-03-31 | 2023-05-17 | Infinitesima Ltd | Machine-learning based methods of probe microscopy |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11125520A (ja) * | 1997-10-21 | 1999-05-11 | Matsushita Electric Ind Co Ltd | 半導体ウエハ支持用部材及び半導体ウエハの平面度測定装置 |
| JP2001317933A (ja) * | 2000-05-02 | 2001-11-16 | Ricoh Co Ltd | 形状測定装置 |
| JP2006078354A (ja) * | 2004-09-10 | 2006-03-23 | Canon Inc | プローブ制御装置および形状測定装置 |
| JP2008076221A (ja) * | 2006-09-21 | 2008-04-03 | Mitsutoyo Corp | 微細形状測定装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0290648B1 (en) | 1987-05-12 | 1992-03-11 | International Business Machines Corporation | Atomic force sensor head for investigating the topography of a surface |
| US5079958A (en) | 1989-03-17 | 1992-01-14 | Olympus Optical Co., Ltd. | Sensor having a cantilever |
| US5172002A (en) | 1991-08-22 | 1992-12-15 | Wyko Corporation | Optical position sensor for scanning probe microscopes |
| JP3081979B2 (ja) | 1992-05-08 | 2000-08-28 | セイコーインスツルメンツ株式会社 | 顕微鏡 |
| JPH07301510A (ja) | 1994-05-02 | 1995-11-14 | Tokyo Seimitsu Co Ltd | 三次元変位プローブ |
| JPH0961441A (ja) | 1995-08-29 | 1997-03-07 | Olympus Optical Co Ltd | スキャニングプローブ |
| JPH0972924A (ja) | 1995-09-04 | 1997-03-18 | Olympus Optical Co Ltd | 走査型プローブ顕微鏡 |
| JP4510277B2 (ja) | 2000-12-15 | 2010-07-21 | エスアイアイ・ナノテクノロジー株式会社 | 走査型プローブ顕微鏡 |
| US7441447B2 (en) * | 2005-10-07 | 2008-10-28 | Georgia Tech Research Corporation | Methods of imaging in probe microscopy |
-
2006
- 2006-08-23 JP JP2006226827A patent/JP5122775B2/ja not_active Expired - Fee Related
-
2007
- 2007-08-22 EP EP07016505.5A patent/EP1892727B1/en not_active Ceased
- 2007-08-22 US US11/892,365 patent/US7681439B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11125520A (ja) * | 1997-10-21 | 1999-05-11 | Matsushita Electric Ind Co Ltd | 半導体ウエハ支持用部材及び半導体ウエハの平面度測定装置 |
| JP2001317933A (ja) * | 2000-05-02 | 2001-11-16 | Ricoh Co Ltd | 形状測定装置 |
| JP2006078354A (ja) * | 2004-09-10 | 2006-03-23 | Canon Inc | プローブ制御装置および形状測定装置 |
| JP2008076221A (ja) * | 2006-09-21 | 2008-04-03 | Mitsutoyo Corp | 微細形状測定装置 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009229078A (ja) * | 2008-03-19 | 2009-10-08 | Mitsutoyo Corp | 形状測定装置 |
| JP2011522273A (ja) * | 2008-06-06 | 2011-07-28 | インフィニテシマ・リミテッド | プローブ検出システム |
| JP2012511715A (ja) * | 2008-12-11 | 2012-05-24 | インフィニテシマ・リミテッド | 動的なプローブ検出システム |
| JP2012002631A (ja) * | 2010-06-16 | 2012-01-05 | Mitsutoyo Corp | 光干渉測定装置および形状測定装置 |
| US8869311B2 (en) | 2011-03-03 | 2014-10-21 | Sii Nanotechnology Inc. | Displacement detection mechanism and scanning probe microscope using the same |
| JP2012184959A (ja) * | 2011-03-03 | 2012-09-27 | Sii Nanotechnology Inc | 変位検出機構およびそれを用いた走査型プローブ顕微鏡 |
| DE102013009175A1 (de) | 2012-05-31 | 2013-12-05 | Mitutoyo Corporation | Profilmessinstrument |
| JP2013250152A (ja) * | 2012-05-31 | 2013-12-12 | Mitsutoyo Corp | 形状測定機 |
| US9115973B2 (en) | 2012-05-31 | 2015-08-25 | Mitutoyo Corporation | Profile measuring instrument |
| JP2014166675A (ja) * | 2013-01-29 | 2014-09-11 | Mitsutoyo Corp | パラレル機構 |
| KR101529607B1 (ko) * | 2013-11-18 | 2015-06-19 | 한국표준과학연구원 | 탐침현미경, 이를 이용한 탐침현미경의 정렬방법, 기록매체 및 정렬 시스템 |
| JP2015172597A (ja) * | 2015-06-02 | 2015-10-01 | 株式会社日立ハイテクサイエンス | 変位検出機構およびそれを用いた走査型プローブ顕微鏡 |
| DE102016013550B3 (de) | 2016-11-08 | 2018-04-19 | Rolf Klöden | Profilmesssystem für eine Rauheits- und Konturmessung an einer Oberfläche eines Werkstücks |
| WO2022004102A1 (ja) * | 2020-06-30 | 2022-01-06 | トタニ技研工業株式会社 | 欠陥検出装置、および、製袋機 |
| JPWO2022004102A1 (ja) * | 2020-06-30 | 2022-01-06 | ||
| JP7180926B2 (ja) | 2020-06-30 | 2022-11-30 | トタニ技研工業株式会社 | 欠陥検出装置、および、製袋機 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080047335A1 (en) | 2008-02-28 |
| JP5122775B2 (ja) | 2013-01-16 |
| EP1892727A1 (en) | 2008-02-27 |
| EP1892727B1 (en) | 2016-10-12 |
| US7681439B2 (en) | 2010-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5122775B2 (ja) | 測定装置 | |
| JP5164424B2 (ja) | 光学的変位測定装置 | |
| EP2163906B1 (en) | Method of detecting a movement of a measuring probe and measuring instrument | |
| CN109579780B (zh) | 一种基于偏振分光自准直三维角度测量装置与方法 | |
| CN106796098B (zh) | 使用光谱分析的干涉式编码器 | |
| US5369488A (en) | High precision location measuring device wherein a position detector and an interferometer are fixed to a movable holder | |
| CN104457571B (zh) | 光学位置测量装置 | |
| JPH03255907A (ja) | 形状測定装置及び形状測定方法 | |
| US8822907B2 (en) | Optical position-measuring device having two crossed scales | |
| CN112781529A (zh) | 一种对入射角不敏感的直线度干涉测量装置 | |
| KR960013676B1 (ko) | 미소변위검출방법 | |
| JP4790551B2 (ja) | 微細形状測定装置 | |
| TWI579525B (zh) | 運動物件之絕對定位距離與偏擺角度同步量測之光學系統與方法 | |
| JP2002148025A (ja) | 3次元形状測定装置 | |
| JP2008096295A (ja) | 三次元センサおよび接触プローブ | |
| JP5545987B2 (ja) | 光干渉測定装置および形状測定装置 | |
| JPH095059A (ja) | 平面度測定装置 | |
| JP5959844B2 (ja) | 形状測定装置 | |
| JP2002116010A (ja) | 三次元形状測定方法及び装置 | |
| KR20220079877A (ko) | 스캐닝 프로브 현미경을 이용하여 표면을 이미징 하는 방법 | |
| JP5054318B2 (ja) | 変位センサ、形状測定装置 | |
| JP2949179B2 (ja) | 非接触式形状測定装置及び形状測定法 | |
| JPH0754802Y2 (ja) | 接触式表面形状測定器 | |
| JP5149085B2 (ja) | 変位計 | |
| TW200923343A (en) | 3-DOF optical measurement probe with in-line beams |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111025 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120912 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121009 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121025 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5122775 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |