JP2008109727A - インバータ装置 - Google Patents
インバータ装置 Download PDFInfo
- Publication number
- JP2008109727A JP2008109727A JP2006287510A JP2006287510A JP2008109727A JP 2008109727 A JP2008109727 A JP 2008109727A JP 2006287510 A JP2006287510 A JP 2006287510A JP 2006287510 A JP2006287510 A JP 2006287510A JP 2008109727 A JP2008109727 A JP 2008109727A
- Authority
- JP
- Japan
- Prior art keywords
- pwm control
- control signal
- inverter
- signal generator
- group
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Power Conversion In General (AREA)
- Inverter Devices (AREA)
Abstract
【課題】複数の交流モータを個別にPWM駆動する際のインバータスイッチングに起因するノイズ特にそのコモンモードノイズを実質的に良好に低減可能なモータ制御装置を提供すること。
【解決手段】三相交流モータ1をPWM駆動制御するインバータ3にPWM制御信号を与えるPWM制御信号生成部5と、三相交流モータ2をPWM駆動制御するインバータ4にPWM制御信号を与えるPWM制御信号生成部6とは、周波数が等しく位相が180度ずれたキャリヤ信号に基づいて形成される。これにより、特にオンデューティ比が50%近傍にて非常に優れたコモンモードノイズ相殺効果が得られる。
【選択図】図1
【解決手段】三相交流モータ1をPWM駆動制御するインバータ3にPWM制御信号を与えるPWM制御信号生成部5と、三相交流モータ2をPWM駆動制御するインバータ4にPWM制御信号を与えるPWM制御信号生成部6とは、周波数が等しく位相が180度ずれたキャリヤ信号に基づいて形成される。これにより、特にオンデューティ比が50%近傍にて非常に優れたコモンモードノイズ相殺効果が得られる。
【選択図】図1
Description
本発明は、インバータ装置に関し、特にそのスイッチングノイズの低減に関する。
PWM制御などにより形成されて主として交流モータ駆動用の交流電圧を形成するインバータ装置では高周波のスイッチングノイズ(以下、インバータノイズとも称する)が発生する。このインバータノイズは、電源ラインを通じて直流電源系に悪影響を与えたり、電磁波ノイズを周囲に放射したりするため、極力低減する必要がある。
特許文献1は、それぞれ三相インバータである第1モータ駆動用の第1インバータと第2モータ駆動用の第2インバータとを駆動制御するPWM信号発生器を共用化することにより、第1モータ駆動用の第1インバータの上アーム素子のオンと、第2モータ駆動用の第2インバータの下アーム素子のオンとを同期させ、第1モータ駆動用の第1インバータの下アーム素子のオンと、第2モータ駆動用の第2インバータの上アーム素子のオンとを同期させることにより、スイッチングノイズを低減できることを主張している。更に詳しく説明すると、この技術では、第1インバータは上アーム素子U1、V1、W1、下アーム素子X1、Y1、Z1をもち、第2インバータは上アーム素子U2、V2、W2、下アーム素子X2、Y2、Z2をもつ。スイッチング素子U1、X2のペア、スイッチング素子V1、Y2のペア、スイッチング素子W1、Z2のペア、スイッチング素子Y1、V2のペア、スイッチング素子Z1、W2のペアを、ペアごとに同期してオン、オフさせる。
特願平11-117749号公報
しかしながら、上記した従来技術のスイッチングノイズキャンセル技術では、2台のモータが、常に同時運転されるとともに、両モータの出力すなわちPWMデューテイ比が相補関係に固定されてしまうため、実用性に大きな問題があった。更に、2個のモータの巻線とグランドとの間の浮遊容量の大きさが異なると浮遊容量を通じて外部に流れるコモンモードノイズ電流に差が生じ、そのキャンセル効果は小さくなってしまう。
本発明は上記問題点に鑑みなされたものであり、複数のモータを個別にPWM駆動する際のインバータスイッチングに起因するノイズを実質的に良好に低減可能なモータ制御装置を提供することをその目的としている。
上記課題を解決するための本発明は、それぞれスイッチング素子である上アーム素子と下アーム素子とを直列接続してなるハーフブリッジを相数分並列接続して構成されるとともに共通直流電源から給電されるインバータをそれぞれ少なくとも一つ含む複数のインバータ群と、PWM制御信号を出力するPWM制御信号発生器をそれぞれ少なくとも一つ含み前記複数のインバータ群に前記PWM制御信号を個別に出力する複数のPWM制御信号発生器群と、前記PWM制御信号を作成するためのキャリヤ信号を前記複数のPWM制御信号発生器群に出力するキャリヤ信号発生器とを備える複数モータ制御装置において、前記複数のPWM制御信号発生器群が、周波数が等しく、かつ、互いに位相が異なるキャリヤ信号を基礎とする前記PWM制御信号を前記インバータ群に個別に出力することを特徴としている。以下、説明を簡単とするため、各インバータ群がそれぞれ一個のインバータからなる場合を例として説明する。
すなわち、この発明は、複数のインバータに印加するPWM制御信号の周波数を等しくし、位相をずらせる。好適には、各インバータのスイッチングノイズ電力が最小となる位相が選択される。以下、三相インバータを例として具体的に説明すると、2つの三相インバータの同一相同アーム側のスイッチング素子に印加されるPWM制御信号の位相は、各インバータの同一相同アーム側のスイッチング素子のスイッチングノイズ電力が好適には最小となるように位相がシフトされる。これにより、各インバータの同一相同アーム側のスイッチング素子のオン期間がこの位相分だけずれるため、それによる合成スイッチングノイズの振幅を低減できる。これにより、電源ラインを通じてあるいは電磁波として外部に出力されるスイッチングノイズの影響を簡素な回路構成により低減することができる。また、合成スイッチングノイズの周波数は等価的に増大するため、たとえば直流電源と並列接続された平滑コンデンサによるスイッチングノイズ電流の吸収効果も向上することができる。
好適な態様において、前記キャリヤ信号発生器は、互いに位相が異なり、周波数が等しい複数のキャリヤ信号を前記複数のPWM制御信号発生器群に個別に出力する。これにより、各インバータ群に出力する複数のPWM制御信号の位相を簡素に相対シフトすることができる。なお、各PWM制御信号間の位相シフトのその他の態様としては、同一周期、同一位相のキャリヤ信号からPWM制御信号を形成する各PWM制御信号発生器内に、キャリヤ信号の位相あるいは形成したPWM制御信号の位相をシフトする回路を個別に組み込むことも可能である。
好適な態様において、前記複数のインバータ群は、第1インバータ群と第2インバータ群とを有し、
前記複数のPWM制御信号発生器群は、前記第1インバータ群に前記PWM制御信号を出力する第1PWM制御信号発生器群と、前記第2インバータ群に前記PWM制御信号を出力する第2PWM制御信号発生器群とを有し、前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号を、前記第2PWM制御信号発生器群に出力するキャリヤ信号に対して位相を略180度をずらせる。このようにすれば、上記した合成スイッチングノイズを示すベクトルの長さすなわち振幅を最も減少させることができる。たとえば、PWMのオンデューティ比(以下、単にデューティとも言う)が50%近傍において、第1、第2のインバータの同一相同一アームのスイッチング素子は交互に連続してオンすることになり、その結果、一方のスイッチング素子のオン遷移期間に他方のスイッチング素子のオフ遷移期間が重なることになり、優れたコモンモードノイズ相殺効果が得られる。
前記複数のPWM制御信号発生器群は、前記第1インバータ群に前記PWM制御信号を出力する第1PWM制御信号発生器群と、前記第2インバータ群に前記PWM制御信号を出力する第2PWM制御信号発生器群とを有し、前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号を、前記第2PWM制御信号発生器群に出力するキャリヤ信号に対して位相を略180度をずらせる。このようにすれば、上記した合成スイッチングノイズを示すベクトルの長さすなわち振幅を最も減少させることができる。たとえば、PWMのオンデューティ比(以下、単にデューティとも言う)が50%近傍において、第1、第2のインバータの同一相同一アームのスイッチング素子は交互に連続してオンすることになり、その結果、一方のスイッチング素子のオン遷移期間に他方のスイッチング素子のオフ遷移期間が重なることになり、優れたコモンモードノイズ相殺効果が得られる。
好適な態様において、前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号を反転して前記第2PWM制御信号発生器群に出力するキャリヤ信号とする。このようにすれば、上記した180度位相シフトを簡単な回路で実行することができる。
好適な態様において、前記複数のインバータ群は、第1インバータ群と第2インバータ群と第3インバータ群とを有し、前記複数のPWM制御信号発生器群は、前記第1インバータ群に前記PWM制御信号を出力する第1PWM制御信号発生器群と、前記第2インバータ群に前記PWM制御信号を出力する第2PWM制御信号発生器群と、前記第3インバータ群に前記PWM制御信号を出力する第3PWM制御信号発生器群とを有し、前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号と、前記第2PWM制御信号発生器群に出力するキャリヤ信号と、前記第3PWM制御信号発生器群に出力するキャリヤ信号とを間の位相を略120度ずらせる。このようにすれば、これら3つのPWM制御信号を同一位相で出力するのに比較して合成スイッチングノイズを格段に低減することができる。たとえば、PWMのオンデューティ比(以下、単にデューティとも言う)が33%近傍において、第1〜第3のインバータの同一相同一アームのスイッチング素子は交互に連続してオンすることになり、その結果、一つのスイッチング素子のオン遷移期間に他のスイッチング素子のオフ遷移期間が重なることになり、優れたコモンモードノイズ相殺効果が得られる。また、たとえ上記した各スイッチング素子のオン遷移期間とオフ遷移期間とが重ならなくても、それらが、時間的に分散することにより合成スイッチングノイズ電力の振幅低減と高周波化による既述の効果は実現することができる。
好適な態様において、前記複数のインバータ群の出力端と接地との間の対地寄生容量の差異を低減するコンデンサを、前記対地寄生容量が小さい前記複数のインバータ群の出力端と接地との間に付加することにより、前記複数のインバータ群の前記対地寄生容量の差異を低減する。なお、ここで言うインバータ群又はインバータの出力端と接地との間の対地寄生容量とは、インバータから給電される電気負荷たとえばモータの対地寄生容量を含む。このようにすれば、インバータのスイッチングにより形成された対地絶縁方式のインバータ及び電気負荷にそれらの対地静電容量を通じて流れる電流(以下、コモンモードノイズ電流とも言う)を良好に平均化することができる。たとえば、PWMのオンデューティ比(以下、単にデューティとも言う)が50%近傍において、第1、第2のインバータの同一相同一アームのスイッチング素子は交互に連続してオンすることになり、その結果、一方のスイッチング素子のオン遷移期間に他方のスイッチング素子のオフ遷移期間が重なることになり、優れたコモンモードノイズ相殺効果が得られる。
好適な態様において、前記複数のインバータ群の入力端から見た前記複数のインバータ群の対地寄生容量の差が最も小さくなるように前記複数のインバータ群から給電される電気負荷を組み合わせる。このようにすれば、インバータのスイッチングにより形成された対地絶縁方式のインバータ及び電気負荷にそれらの対地静電容量を通じて流れるコモンモードノイズ電流を良好に平均化することができる。たとえば、PWMのオンデューティ比(以下、単にデューティとも言う)が50%近傍において、第1、第2のインバータの同一相同一アームのスイッチング素子は交互に連続してオンすることになり、その結果、一方のスイッチング素子のオン遷移期間に他方のスイッチング素子のオフ遷移期間が重なることになり、優れたコモンモードノイズ相殺効果が得られる。
本発明の望ましい実施態様を図面を参照して以下に説明する。ただし、既述した本発明の技術思想は、下記の実施態様に限定解釈されるべきものでなく、その他の公知技術を組み合わせて実施しても良いことは当然である。
(実施形態1)
実施形態1の複数モータ制御装置を図1を参照して以下に説明する。
実施形態1の複数モータ制御装置を図1を参照して以下に説明する。
(回路構成)
実施形態1の複数モータ制御装置を図1に示すブロック回路図を参照して説明する。この実施形態は、それぞれ1つのインバータからなる2つのインバータ群に適用される。
実施形態1の複数モータ制御装置を図1に示すブロック回路図を参照して説明する。この実施形態は、それぞれ1つのインバータからなる2つのインバータ群に適用される。
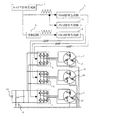
図1において、1、2は三相交流モータ、3、4は三相インバータからなるインバータ、5、6はPWM制御信号生成部(本発明で言うPWM制御信号発生器)、7はキャリヤ信号生成部(本発明で言うキャリヤ信号発生器の一部)、8は信号電圧を反転する反転回路(本発明で言うキャリヤ信号発生器の残部)、9は一対の電源ラインの対地寄生容量(浮遊容量)、10は対地絶縁された直流電源、11はグラウンド、12、13は三相交流モータ1、2の各相ステータコイルの対地静電容量(浮遊容量)、14は直流電源10と並列接続された平滑コンデンサであり、浮遊容量12、13は、それぞれインバータ3、4から三相交流モータ1、2へ至る交流配線の対地寄生容量を含む。三相交流モータ1、2を除く上記各回路部は本発明で言う複数モータ制御装置を構成している。
三相交流モータ1、2は、たとえば三相同期モータや三相交流モータにより構成される。もちろん、相数はこれに限定されるものではない。インバータ3、4は、それぞれ半導体スイッチング素子からなる3つの上アーム素子と3つの下アーム素子とを有し、ひとつの上アーム素子とひとつの下アーム素子とは直列接続されてひとつのハーフブリッジ回路を構成している。インバータ3、4は直流電源10から直流電力を給電されている。インバータ3は形成した三相交流電圧を三相交流モータ1の各相のステータコイルに印加している。インバータ4は形成した三相交流電圧を三相交流モータ2の各相のステータコイルに給電している。
キャリヤ信号生成部7は、たとえば数十KHzの周波数の三角波電圧を第1キャリヤ信号として発生させ、PWM制御信号生成部5に出力する。また、反転回路8は入力された三角波電圧を反転して第2キャリヤ信号としてPWM制御信号生成部6に出力する。PWM制御信号生成部5は、入力された第1キャリヤ信号に基づいて6つのPWM相制御信号からなる第1PWM制御信号を形成し、インバータ3の各アーム素子の制御電極に個別に印加する。PWM制御信号生成部6は、入力された第2キャリヤ信号に基づいて6つのPWM相制御信号からなる第2PWM制御信号を形成し、インバータ4の各アーム素子の制御電極に個別に印加する。
第1PWM制御信号及び第2PWM制御信号の波形は、PWM制御方式において種々異なる。PWM制御方式としては、120度通電方式、180度通電方式、2相変調方式など各種の方式が知られている。典型的には、第1PWM相制御信号の3つの上アーム素子制御用のPWM相制御信号は120度位相がずれている。上記した各種PWM制御方式の詳細とそれに対応したPWM制御信号の形成自体は周知であり、かつ、この実施形態の要旨でもないため、これ以上の説明は省略する。
(動作説明)
以下、上記複数モータ制御装置の動作を説明する。よく知られているように、PWM制御信号生成部5は、入力された第1キャリヤ信号としての三角波電圧を所定のしきい値電圧と比較するコンパレータを有し、コンパレータから出力されるパルス信号乃至それに基づいて形成した6つのパルス信号を上記PWM相制御信号としてインバータ3の各アーム素子に分配する。同じく、PWM制御信号生成部6は、入力された第2キャリヤ信号としての三角波電圧を所定のしきい値電圧と比較するコンパレータを有し、コンパレータから出力されるパルス信号乃至それに基づいて形成した6つのパルス信号を上記PWM相制御信号としてインバータ4の各アーム素子に分配する。この結果、上記しきい値電圧を所定波形に基づいて変調することにより、それに応じたPWM制御信号を得ることができる。
以下、上記複数モータ制御装置の動作を説明する。よく知られているように、PWM制御信号生成部5は、入力された第1キャリヤ信号としての三角波電圧を所定のしきい値電圧と比較するコンパレータを有し、コンパレータから出力されるパルス信号乃至それに基づいて形成した6つのパルス信号を上記PWM相制御信号としてインバータ3の各アーム素子に分配する。同じく、PWM制御信号生成部6は、入力された第2キャリヤ信号としての三角波電圧を所定のしきい値電圧と比較するコンパレータを有し、コンパレータから出力されるパルス信号乃至それに基づいて形成した6つのパルス信号を上記PWM相制御信号としてインバータ4の各アーム素子に分配する。この結果、上記しきい値電圧を所定波形に基づいて変調することにより、それに応じたPWM制御信号を得ることができる。
この実施形態では、PWM制御信号生成部6に入力される第2キャリヤ信号は、PWM制御信号生成部5に入力される第1キャリヤ信号と180度位相がずれ、同一周期とされているため、たとえば、インバータ3とインバータ4との同一相同アーム側のスイッチング素子に印加されるパルス信号であるPWM相制御信号の位相が反対となる。このことは、インバータ3のスイッチングノイズ電力とインバータ4のスイッチングノイズ電力との時間的な重なりが最小となり、その分だけ、それらを合成した合成スイッチングノイズ電力が小さくなり、合成スイッチング周波数が倍増することを意味する。その結果、この合成スイッチングノイズが直流電源10やモータ1、2、さらには近傍の電気機器へ与える影響を大幅に軽減できることを意味する。
このスイッチングノイズ低減効果は、特にPWMオンデューティ比が約50%近傍にて特に効果的となる。たとえば、2つのインバータ3、4をデューティ50%で運転するモータ運転条件において、インバータ3のオン遷移期間は、インバータ4の同一相同アームのスイッチング素子のオフ遷移期間と重なり、インバータ3のオフ遷移期間は、インバータ4の同一相同アームのスイッチング素子のオン遷移期間と重なることになる。したがって、スイッチングノイズ特に、インバータ3、4のスイッチングに伴い、対地寄生容量(浮遊容量)9、12、13及びグラウンド11を通じて流れるコモンモードノイズ電流を大幅に相殺することができる。なお、デューティ50%近傍にて運転しない場合であっても、しきい値電圧(交流電圧の瞬時値)が0値近傍となる期間はデューティが50%近傍となるため、上記効果は特に顕著となる。
(変形態様)
上記実施形態では、反転回路8によりPWM制御信号生成部6へ入力する第2キャリヤ信号の位相を180度ずらせたが、この位相の相対シフトはPWM制御信号生成部6内にて行っても良い。
上記実施形態では、反転回路8によりPWM制御信号生成部6へ入力する第2キャリヤ信号の位相を180度ずらせたが、この位相の相対シフトはPWM制御信号生成部6内にて行っても良い。
(変形態様)
上記実施形態では、インバータ3、4は、三相交流モータ1、2に給電したが、その代わりに電動動作と発電動作とを適宜切り替えて行う三相交流発電電動機に給電してもよい。
上記実施形態では、インバータ3、4は、三相交流モータ1、2に給電したが、その代わりに電動動作と発電動作とを適宜切り替えて行う三相交流発電電動機に給電してもよい。
(実施形態2)
実施形態2の複数モータ制御装置を図2を参照して以下に説明する。
実施形態2の複数モータ制御装置を図2を参照して以下に説明する。
この実施形態は、図1の回路においてインバータ4の三相出力端とグラウンドとの間にそれぞれバランスコンデンサ15を接続した点をその特徴としている。ただし、三相交流モータ1の各相の浮遊容量12は、ほぼ三相交流モータ2の各相の浮遊容量13とバランスコンデンサ15の容量との合計にほぼ等しくされる。このようにすれば、インバータ3、4のスイッチングにより浮遊容量(正確にはインバータ出力側浮遊容量)を通じてグラウンドに流れるノイズ電流(コモンモードノイズ電流と称する)は、両インバータ3、4のオンデューティ比が等しい場合にほぼ等しくなり、既述したようにオンデューティ比が50%近傍において逆位相となるため大幅に相殺することができる。
(実施形態3)
実施形態3の複数モータ制御装置を図3を参照して以下に説明する。
実施形態3の複数モータ制御装置を図3を参照して以下に説明する。
この実施形態は、図1の回路において、PWM制御信号生成部(本発明で言うPWM制御信号発生器)16、インバータ17、三相交流モータ18を追加した点にその特徴がある。更に詳しく説明すると、PWM制御信号生成部16にはキャリヤ信号生成部7から第1キャリヤ信号が入力される。インバータ17は、入力されたPWM制御信号生成部16に基づいて形成した三相交流電圧を三相交流モータ18に印加する。19は三相交流モータ18の各相の浮遊容量である。
ただし、この実施形態では、三相交流モータ2の浮遊容量13はほぼ、三相交流モータ1の浮遊容量12と三相交流モータ18の浮遊容量19の和にほぼ等しくなっている。このようにすれば、図2で説明したバランスコンデンサ15を省略乃至大幅に小型化したとしても、インバータ3、17のスイッチングに伴うコモンモードノイズ電流と、インバータ4のスイッチングに伴うコモンモードノイズ電流の大きさをほぼ等しくかつ逆相とすることができる。
(実施形態4)
実施形態4の複数モータ制御装置を図3を参照して以下に説明する。
実施形態4の複数モータ制御装置を図3を参照して以下に説明する。
この実施形態は、図3の回路において、反転回路8を省略する代わりに、キャリヤ信号生成部7から出力される第1キャリヤ信号の位相をπ/3シフトして第2キャリヤ信号とする位相シフト回路81と、キャリヤ信号生成部7から出力される第1キャリヤ信号の位相を2π/3シフトして第3キャリヤ信号とする位相シフト回路82とを設けたものである。なお、この実施形態では、各三相交流モータ1、2、18の浮遊容量12、13、19は略等しいと仮定する。
第2キャリヤ信号はPWM制御信号生成部16に入力され、第3キャリヤ信号はPWM制御信号生成部6に入力される。これにより、各PWM制御信号生成部5、6、16が出力する各PWM制御信号は同一周波数にて位相が約120度ずつずれていることになる。このようにすれば、3つのインバータ3、4、17が出力するスイッチングノイズを時間的に均等分散するため既述の合成スイッチングノイズ低減効果並びにコモンモードノイズを良好に低減することができる。特にこれらの効果は、オンデューティ比が33%程度の場合に顕著となる。
(実験例)
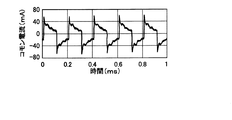
実施形態2によるコモンモードノイズ電流波形を図5に示し、実施形態2にて第1、第2キャリヤ信号の位相を一致させた場合のコモンモードノイズ電流波形を図6に示す。PWM制御信号のオンデューティ比は50%、二つの浮遊容量9はそれぞれ40nF、三相交流モータ1の浮遊容量12は12nF、三相交流モータ2の浮遊容量13は4nF、バランスコンデンサ容量15は一相あたり2.7nFである。図5、図6からコモンモードノイズ電流の大幅な低減が実現できたことがわかる。
実施形態2によるコモンモードノイズ電流波形を図5に示し、実施形態2にて第1、第2キャリヤ信号の位相を一致させた場合のコモンモードノイズ電流波形を図6に示す。PWM制御信号のオンデューティ比は50%、二つの浮遊容量9はそれぞれ40nF、三相交流モータ1の浮遊容量12は12nF、三相交流モータ2の浮遊容量13は4nF、バランスコンデンサ容量15は一相あたり2.7nFである。図5、図6からコモンモードノイズ電流の大幅な低減が実現できたことがわかる。
1 三相交流モータ
2 三相交流モータ
3 インバータ
4 インバータ
5 PWM制御信号生成部
6 PWM制御信号生成部
7 キャリヤ信号生成部
8 反転回路
9 浮遊容量
10 直流電源
11 グラウンド
12 浮遊容量
13 浮遊容量
15 バランスコンデンサ
16 PWM制御信号生成部
17 インバータ
18 三相交流モータ
19 浮遊容量
81 位相シフト回路
82 位相シフト回路
2 三相交流モータ
3 インバータ
4 インバータ
5 PWM制御信号生成部
6 PWM制御信号生成部
7 キャリヤ信号生成部
8 反転回路
9 浮遊容量
10 直流電源
11 グラウンド
12 浮遊容量
13 浮遊容量
15 バランスコンデンサ
16 PWM制御信号生成部
17 インバータ
18 三相交流モータ
19 浮遊容量
81 位相シフト回路
82 位相シフト回路
Claims (7)
- それぞれスイッチング素子である上アーム素子と下アーム素子とを直列接続してなるハーフブリッジを相数分並列接続して構成されるとともに共通直流電源から給電されるインバータをそれぞれ少なくとも一つ含む複数のインバータ群と、
PWM制御信号を出力するPWM制御信号発生器をそれぞれ少なくとも一つ含み前記複数のインバータ群に前記PWM制御信号を個別に出力する複数のPWM制御信号発生器群と、
前記PWM制御信号を作成するためのキャリヤ信号を前記複数のPWM制御信号発生器群に出力するキャリヤ信号発生器と、
を備える複数モータ制御装置において、
前記複数のPWM制御信号発生器群は、
周波数が等しく、かつ、互いに位相が異なるキャリヤ信号を基礎とする前記PWM制御信号を前記インバータ群に個別に出力することを特徴とする複数モータ制御装置。 - 請求項1記載の複数モータ制御装置において、
前記キャリヤ信号発生器は、
互いに位相が異なり、周波数が等しい複数のキャリヤ信号を前記複数のPWM制御信号発生器群に個別に出力することを特徴とする複数モータ制御装置。 - 請求項2記載の複数モータ制御装置において、
前記複数のインバータ群は、第1インバータ群と第2インバータ群とを有し、
前記複数のPWM制御信号発生器群は、前記第1インバータ群に前記PWM制御信号を出力する第1PWM制御信号発生器群と、前記第2インバータ群に前記PWM制御信号を出力する第2PWM制御信号発生器群とを有し、
前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号を、前記第2PWM制御信号発生器群に出力するキャリヤ信号に対して位相を略180度をずらせる複数モータ制御装置。 - 請求項3記載の複数モータ制御装置において、
前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号を反転して前記第2PWM制御信号発生器群に出力するキャリヤ信号とする複数モータ制御装置。 - 請求項2記載の複数モータ制御装置において、
前記複数のインバータ群は、第1インバータ群と第2インバータ群と第3インバータ群とを有し、
前記複数のPWM制御信号発生器群は、前記第1インバータ群に前記PWM制御信号を出力する第1PWM制御信号発生器群と、前記第2インバータ群に前記PWM制御信号を出力する第2PWM制御信号発生器群と、前記第3インバータ群に前記PWM制御信号を出力する第3PWM制御信号発生器群とを有し、
前記キャリヤ信号発生器は、前記第1PWM制御信号発生器群に出力するキャリヤ信号と、前記第2PWM制御信号発生器群に出力するキャリヤ信号と、前記第3PWM制御信号発生器群に出力するキャリヤ信号とを間の位相を略120度ずらせる複数モータ制御装置。 - 請求項1記載の複数モータ制御装置において、
前記複数のインバータ群の出力端と接地との間の対地寄生容量の差異を低減するコンデンサを、前記対地寄生容量が小さい前記複数のインバータ群の出力端と接地との間に付加することにより、前記複数のインバータ群の前記対地寄生容量の差異を低減する複数モータ制御装置。 - 請求項1記載の複数モータ制御装置において、
前記複数のインバータ群の入力端から見た前記複数のインバータ群の対地寄生容量の差が最も小さくなるように前記複数のインバータ群から給電される電気負荷を組み合わせる複数モータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006287510A JP2008109727A (ja) | 2006-10-23 | 2006-10-23 | インバータ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006287510A JP2008109727A (ja) | 2006-10-23 | 2006-10-23 | インバータ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2008109727A true JP2008109727A (ja) | 2008-05-08 |
Family
ID=39442648
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006287510A Pending JP2008109727A (ja) | 2006-10-23 | 2006-10-23 | インバータ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008109727A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010288321A (ja) * | 2009-06-09 | 2010-12-24 | Daikin Ind Ltd | 負荷駆動装置 |
| WO2011064970A1 (ja) * | 2009-11-26 | 2011-06-03 | パナソニック株式会社 | 負荷駆動システム、電動機駆動システム、および車両制御システム |
| WO2012114897A1 (ja) * | 2011-02-25 | 2012-08-30 | Ntn株式会社 | インホイールモータ車両の駆動装置 |
| JP2013059181A (ja) * | 2011-09-07 | 2013-03-28 | Denso Corp | 電力変換装置 |
| US8885368B2 (en) | 2010-09-29 | 2014-11-11 | Panasonic Corporation | Power converting apparatus suppressing switching noise by controlling switching operation |
| JP2015202041A (ja) * | 2015-05-14 | 2015-11-12 | Ntn株式会社 | 車両の駆動輪用のモータ駆動装置 |
| CN105450011A (zh) * | 2015-12-31 | 2016-03-30 | 深圳市英威腾交通技术有限公司 | 一种逆变器 |
| WO2017137324A1 (en) * | 2016-02-08 | 2017-08-17 | Abb Schweiz Ag | Synchronising traction converters |
| JP2018052148A (ja) * | 2016-09-26 | 2018-04-05 | 株式会社Subaru | ハイブリッド車両の制御装置 |
| US20180361830A1 (en) * | 2017-06-19 | 2018-12-20 | Ford Global Technologies, Llc | Dual electric drive a/c compressor system and method |
| EP3425786A1 (en) * | 2017-07-03 | 2019-01-09 | Hamilton Sundstrand Corporation | Motor drive system |
| KR20190052389A (ko) * | 2017-11-08 | 2019-05-16 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 공기조화기 |
| JP2019092344A (ja) * | 2017-11-16 | 2019-06-13 | 株式会社ジェイテクト | モータ制御装置 |
| JP2019092345A (ja) * | 2017-11-16 | 2019-06-13 | 株式会社ジェイテクト | モータ制御装置 |
| JP2019205277A (ja) * | 2018-05-23 | 2019-11-28 | ファナック株式会社 | モータ駆動装置及びモータ駆動方法 |
| KR102058045B1 (ko) * | 2018-12-03 | 2019-12-20 | 엘지전자 주식회사 | 모터 구동 장치 및 이를 구비하는 공기조화기 |
| CN110635705A (zh) * | 2018-06-22 | 2019-12-31 | 伦茨自动化有限责任公司 | 用于运行电驱动系统的方法、电控制器和电驱动系统 |
| DE112019006967T5 (de) | 2019-03-04 | 2021-12-02 | Mitsubishi Electric Corporation | Rotierende elektrische maschine, antriebseinrichtung für eine rotierende elektrische maschine, sowie antriebssystem für eine rotierende elektrische maschine |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000078850A (ja) * | 1998-08-31 | 2000-03-14 | Aisin Aw Co Ltd | インバータ装置及びその制御方法 |
| JP2000092848A (ja) * | 1998-09-16 | 2000-03-31 | Toyo Electric Mfg Co Ltd | 電力変換装置の多数台運転方法 |
| JP2001211653A (ja) * | 2000-01-28 | 2001-08-03 | Sumitomo Heavy Ind Ltd | 多軸駆動装置における漏れ電流低減方法 |
| JP2002051566A (ja) * | 2000-08-03 | 2002-02-15 | Toyota Central Res & Dev Lab Inc | インバータ制御装置およびインバータの制御方法 |
| JP2004304868A (ja) * | 2003-03-28 | 2004-10-28 | Nissan Motor Co Ltd | モーター制御装置 |
-
2006
- 2006-10-23 JP JP2006287510A patent/JP2008109727A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000078850A (ja) * | 1998-08-31 | 2000-03-14 | Aisin Aw Co Ltd | インバータ装置及びその制御方法 |
| JP2000092848A (ja) * | 1998-09-16 | 2000-03-31 | Toyo Electric Mfg Co Ltd | 電力変換装置の多数台運転方法 |
| JP2001211653A (ja) * | 2000-01-28 | 2001-08-03 | Sumitomo Heavy Ind Ltd | 多軸駆動装置における漏れ電流低減方法 |
| JP2002051566A (ja) * | 2000-08-03 | 2002-02-15 | Toyota Central Res & Dev Lab Inc | インバータ制御装置およびインバータの制御方法 |
| JP2004304868A (ja) * | 2003-03-28 | 2004-10-28 | Nissan Motor Co Ltd | モーター制御装置 |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010288321A (ja) * | 2009-06-09 | 2010-12-24 | Daikin Ind Ltd | 負荷駆動装置 |
| CN102273058B (zh) * | 2009-11-26 | 2014-07-23 | 松下电器产业株式会社 | 负载驱动系统、电动机驱动系统以及车辆控制系统 |
| WO2011064970A1 (ja) * | 2009-11-26 | 2011-06-03 | パナソニック株式会社 | 負荷駆動システム、電動機駆動システム、および車両制御システム |
| JP4825323B2 (ja) * | 2009-11-26 | 2011-11-30 | パナソニック株式会社 | 負荷駆動システム、電動機駆動システム、および車両制御システム |
| CN102273058A (zh) * | 2009-11-26 | 2011-12-07 | 松下电器产业株式会社 | 负载驱动系统、电动机驱动系统以及车辆控制系统 |
| EP2506414A4 (en) * | 2009-11-26 | 2017-04-26 | Panasonic Intellectual Property Management Co., Ltd. | Load drive system, electric motor drive system and vehicle control system |
| US8680794B2 (en) | 2009-11-26 | 2014-03-25 | Panasonic Corporation | Load drive system, motor drive system, and vehicle control system |
| US8885368B2 (en) | 2010-09-29 | 2014-11-11 | Panasonic Corporation | Power converting apparatus suppressing switching noise by controlling switching operation |
| US9712090B2 (en) | 2011-02-25 | 2017-07-18 | Ntn Corporation | Driving device for motor for drive wheel of vehicle |
| US9487092B2 (en) | 2011-02-25 | 2016-11-08 | Ntn Corporation | Driving device for in-wheel motor vehicles |
| JP2012176634A (ja) * | 2011-02-25 | 2012-09-13 | Ntn Corp | インホイールモータ車両の駆動装置 |
| WO2012114897A1 (ja) * | 2011-02-25 | 2012-08-30 | Ntn株式会社 | インホイールモータ車両の駆動装置 |
| JP2013059181A (ja) * | 2011-09-07 | 2013-03-28 | Denso Corp | 電力変換装置 |
| JP2015202041A (ja) * | 2015-05-14 | 2015-11-12 | Ntn株式会社 | 車両の駆動輪用のモータ駆動装置 |
| CN105450011A (zh) * | 2015-12-31 | 2016-03-30 | 深圳市英威腾交通技术有限公司 | 一种逆变器 |
| WO2017137324A1 (en) * | 2016-02-08 | 2017-08-17 | Abb Schweiz Ag | Synchronising traction converters |
| JP2018052148A (ja) * | 2016-09-26 | 2018-04-05 | 株式会社Subaru | ハイブリッド車両の制御装置 |
| US20180361830A1 (en) * | 2017-06-19 | 2018-12-20 | Ford Global Technologies, Llc | Dual electric drive a/c compressor system and method |
| EP3425786A1 (en) * | 2017-07-03 | 2019-01-09 | Hamilton Sundstrand Corporation | Motor drive system |
| KR20190052389A (ko) * | 2017-11-08 | 2019-05-16 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 공기조화기 |
| KR101989107B1 (ko) * | 2017-11-08 | 2019-09-30 | 엘지전자 주식회사 | 모터 구동장치 및 이를 구비하는 공기조화기 |
| JP2019092344A (ja) * | 2017-11-16 | 2019-06-13 | 株式会社ジェイテクト | モータ制御装置 |
| JP2019092345A (ja) * | 2017-11-16 | 2019-06-13 | 株式会社ジェイテクト | モータ制御装置 |
| CN109981024A (zh) * | 2017-11-16 | 2019-07-05 | 株式会社捷太格特 | 马达控制装置 |
| JP7054435B2 (ja) | 2017-11-16 | 2022-04-14 | 株式会社ジェイテクト | モータ制御装置 |
| JP2019205277A (ja) * | 2018-05-23 | 2019-11-28 | ファナック株式会社 | モータ駆動装置及びモータ駆動方法 |
| US11011952B2 (en) | 2018-05-23 | 2021-05-18 | Fanuc Corporation | Motor driving device and motor driving method |
| CN110635705A (zh) * | 2018-06-22 | 2019-12-31 | 伦茨自动化有限责任公司 | 用于运行电驱动系统的方法、电控制器和电驱动系统 |
| KR102058045B1 (ko) * | 2018-12-03 | 2019-12-20 | 엘지전자 주식회사 | 모터 구동 장치 및 이를 구비하는 공기조화기 |
| DE112019006967T5 (de) | 2019-03-04 | 2021-12-02 | Mitsubishi Electric Corporation | Rotierende elektrische maschine, antriebseinrichtung für eine rotierende elektrische maschine, sowie antriebssystem für eine rotierende elektrische maschine |
| US11323049B2 (en) | 2019-03-04 | 2022-05-03 | Mitsubishi Electric Corporation | Rotary electric machine, rotary electric machine drive device, and rotary electric machine drive system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008109727A (ja) | インバータ装置 | |
| CN102273058B (zh) | 负载驱动系统、电动机驱动系统以及车辆控制系统 | |
| JP4380755B2 (ja) | 回転電機装置 | |
| JP6087666B2 (ja) | 電力変換装置 | |
| RU2388133C2 (ru) | Система и способ снижения влияний гармоник на систему доставки энергии | |
| CN114868331B (zh) | 旋转电机控制装置 | |
| EP2605395A1 (en) | A track-bound vehicle inverter | |
| JP6117039B2 (ja) | 電力変換装置およびエレベーター | |
| JP2020036516A (ja) | 回転電機制御装置 | |
| JP6712096B2 (ja) | 電力変換装置および電動パワーステアリング装置 | |
| JP2009232619A (ja) | 電力変換装置 | |
| JP2012196119A (ja) | 電流形電力変換装置 | |
| JP4575555B2 (ja) | 動力出力装置 | |
| JP5924931B2 (ja) | 電動機駆動システム | |
| JP6551297B2 (ja) | インバータ制御装置 | |
| JP4016819B2 (ja) | インバータ装置、ドライブ制御装置及びドライブ制御方法 | |
| KR101225344B1 (ko) | 전력 변환기, 그 제어 방법 및 다이렉트 매트릭스 컨버터 | |
| Cacciato et al. | A novel space-vector modulation technique for common node emissions reduction | |
| JP7254198B2 (ja) | 多相電動機駆動装置 | |
| JP4838031B2 (ja) | 多重インバータの制御システム | |
| Jyothi et al. | Modeling and Simulation of Five-phase Induction Motor Fed with Five-phase Inverter Topologies | |
| JP2017175824A (ja) | インバータ制御装置およびインバータ制御方法 | |
| JP6462937B1 (ja) | 交流モータ駆動装置 | |
| JP2012016196A (ja) | インバータ発電機の並列運転方式 | |
| KR20140050974A (ko) | 전동기 구동장치 및 구동방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110616 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111206 |