JP2008152603A - ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法 - Google Patents
ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法 Download PDFInfo
- Publication number
- JP2008152603A JP2008152603A JP2006340805A JP2006340805A JP2008152603A JP 2008152603 A JP2008152603 A JP 2008152603A JP 2006340805 A JP2006340805 A JP 2006340805A JP 2006340805 A JP2006340805 A JP 2006340805A JP 2008152603 A JP2008152603 A JP 2008152603A
- Authority
- JP
- Japan
- Prior art keywords
- center
- gravity
- gravity position
- axis
- stage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Control Of Position Or Direction (AREA)
- Control Of Linear Motors (AREA)
- Feedback Control In General (AREA)
Abstract
【解決手段】 複数軸のうち、ある1軸の重心位置指令から他の1軸の重心位置偏差までのボード線図ゲイン特性を用いて、前記ある1軸の重心位置ずれを調整または補正する手段2,3,15を備えた。
【選択図】図1
Description
第1の従来技術は、リニアモータを備えたステージの制御装置および制御方法に関し、リニアモータの振動のメカニズムを忠実に再現し、振動成分を除去するモデル補償器によるリニアモータの制御装置および制御方法を提供している(例えば、特許文献1参照)。
また、第2の従来技術は、リニアモータを備えたステージの制御装置および制御方法に関し、リニアモータの運転には一般的に回転振動(ヨーイング、ピッチング、ローリング)を伴い、速度・位置の精度を保つことが難しいため、リニアモータの推力の変化に連続して対応できる制振制御手段を備えて、ハイゲイン化された高速で高精度の駆動が行なえる制御装置および制御方法を提供している(例えば、特許文献2参照)。
このように、第1または第2の従来技術は、1軸(単軸)で構成されるステージを制御する上で、図14におけるリニアモータ振動補償モデル100や図15におけるオブザーバ207を備えている。
また、多軸で構成される機械(ステージ)を制御する場合は、機械(ステージ)に取付けた外部センサ情報や位置検出器を有するモータの位置情報等に基づいて重心位置を計算しており、重心位置がずれた場合の補正手段を持たないため、重心位置がずれた場合、軸間の干渉が生じ、多軸で構成される機械(ステージ)を正確に制御できないという問題があった。また、軸間の干渉により、振動が発生して多軸で構成される精密な機械(ステージ)の破損や機械的歪み等が発生するという問題もあった。
本発明はこのような問題点に鑑みてなされたものであり、多軸で構成される機械(ステージ)を制御する場合、機械パラメータ(重心位置、質量、慣性モーメント)がずれている軸ならびにそのずれ量を容易に把握することができ、その機械パラメータ(重心位置、質量、慣性モーメント)を補正して機械(ステージ)を正確に制御することができるステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法を提供することを目的とする。
請求項1に記載の発明は、絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御するステージ制御装置において、複数軸のうち、ある1軸の前記重心位置指令から他の1軸の前記重心位置偏差までのボード線図ゲイン特性に基づいて、前記ステージの重心位置ずれを調整または補正する手段を備えたものである。
また、請求項4に記載の発明は、請求項1または2記載の発明における前記ステージ制御装置が、更に、前記ボード線図ゲイン特性を表示する手段を備え、表示された前記ボード線図ゲイン特性からその最大値を抽出して、前記ステージの重心位置ずれを調整または補正するものである。
また、請求項6に記載の発明は、請求項3記載の発明における前記ゲイン特性比較部が、前記ステージの重心位置ずれがある場合、前記ある1軸の正または負方向の前記重心位置補正量を算出し、前記重心位置補正量に基づいて算出した新たなボード線図ゲイン特性の最大値を今回値として、前記今回値と前回値または前記設定されたしきい値との比較結果に基づいて、次回の重心位置補正量の補正方向とその量を決定するものである。
また、請求項10に記載の発明は、請求項9記載の発明における前記ステージの重心位置ずれがある場合、前記ある1軸の正または負方向の前記重心位置補正量を算出し、前記重心位置補正量に基づいて算出した新たなボード線図ゲイン特性の最大値を今回値として、前記今回値と前回値または前記設定されたしきい値との比較結果に基づいて、次回の重心位置補正量の補正方向とその量を決定するのである。
また、請求項14に記載の発明は、請求項11または12記載の発明における前記ステージ制御装置が、前記Z方向の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記質量または前記慣性モーメントのずれを判断する、または、前記他の1軸の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記重心位置のずれを判断する、前記重心位置偏差比較部と、前記機械パラメータの各数値を、前記重心位置偏差比較部の判断結果に基づいて増減させる機械パラメータ調整部と、前記重心位置偏差比較部の判断結果に基づいて前記重心位置を調整する重心位置演算部と、を備えたものである。
また、請求項18に記載の発明は、請求項15または16記載の発明における前記質量または前記慣性モーメントを調整する処理は、前記Z方向の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記質量または前記慣性モーメントのずれを判断し、その判断結果に基づいて前記質量または前記慣性モーメントの各数値を、増減させて前記質量または前記慣性モーメントを調整するのである。
また、請求項19に記載の発明は、請求項15または16記載の発明における前記重心位置を調整する処理は、前記他の1軸の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記重心位置のずれを判断し、その判断結果に基づいて前記重心位置の数値を、増減させて前記重心位置を調整するのである。
また、ステージの重心位置を調整または補正するので、多軸で構成される機械(ステージ)を制御する場合、軸間の干渉が生じず、多軸で構成される機械(ステージ)を正確に制御でき、軸間の干渉による振動が発生して多軸で構成される精密な機械(ステージ)の破損や機械的歪み等が発生することもない。
また、単なる1軸の搬送ではない検査装置等の精密な可動(XY軸、XYZ軸等)が必要とされる用途にも適用することができ、ステージ制御装置の汎用性を高めることができる。
請求項4または5記載の発明によると、ステージの重心位置ずれ度合いを目視確認でき、更に容易に、より確実にステージの重心位置を調整または補正できる。また、調整または補正の精度も更に高めることができる。
請求項11乃至19に記載の発明によると、ステージの機械パラメータ(重心位置、質量、慣性モーメント)がずれている軸ならびにそのずれ量を容易に把握することができ、また、容易に確実にステージの機械パラメータ(重心位置、質量、慣性モーメント)を調整でき、調整の精度も高めることができる。
また、ステージの機械パラメータ(重心位置、質量、慣性モーメント)を調整するので、多軸で構成される機械(ステージ)を制御する場合、軸間の干渉が生じず、多軸で構成される機械(ステージ)を正確に制御でき、軸間の干渉による振動が発生して多軸で構成される精密な機械(ステージ)の破損や機械的歪み等が発生することもない。
また、単なる1軸の搬送ではない検査装置等の精密な可動(XY軸、XYZ軸等)が必要とされる用途にも適用することができ、ステージ制御装置の汎用性を高めることができる。
本発明が従来技術と異なる部分は、ボード線図生成部2とゲイン特性比較部3を新たに備えた部分であり、重心位置演算部15が重心位置ずれを調整または補正される重心位置を算出する部分である。
重心位置指令演算部5は、絶対座標系の位置指令を機械的原点からみた重心位置指令Prefに座標変換する。
位置制御部11は、重心位置指令Prefと重心位置Pfbとを入力して重心速度指令Vrefを出力する。なお、位置制御部11は、通常、比例制御または比例積分制御を行なう。速度制御部12は、重心速度指令Vrefと重心速度Vfbとを入力して重心位置の推力指令FGrefを出力する。なお、速度制御部12は、通常、比例制御または比例積分制御を行なう。
あるいは、ボード線図生成部2は、ステージ制御装置1の内部機能の1つとして有し、重心位置指令Prefから重心位置偏差Presまでの伝達関数(ボード線図)を求め、その伝達関数(ボード線図)を表示する手段をステージ制御装置1に更に備え、作業者または調整者が表示された伝達関数(ボード線図)からボード線図ゲイン特性の最大値を抽出することもできる。
あるいは、ボード線図生成部2は、ステージ制御装置1の内部機能の1つの代わりとなる、サーボアナライザ等の伝達関数(ボード線図)が得られ表示する測定器であってもよい。すなわち、ステージ制御装置1から重心位置指令Prefと重心位置偏差Presを出力して測定器に入力し、伝達関数(ボード線図)を表示させ、作業者または調整者が表示された伝達関数(ボード線図)からボード線図ゲイン特性の最大値を抽出することもできる。
電流制御部14は、モータ推力指令Frefを電流指令値に変換し、電流指令値および電流検出値に基づいてスイッチング素子(図示しない)等を駆動し、制御対象20を構成するモータ21に電力を供給する。
重心位置演算部15は、センサ22の情報と前述したゲイン特性比較部3からの重心位置補正量とから重心位置Pfbを演算して出力する。ここで、センサ22はステージに取付けられた重心位置算出のための外部センサや、ステージに取付けられたモータに備わる位置検出器等を指す。ゲイン特性比較部3における重心位置の補正が行なわれない場合は、センサ22の情報のみで重心位置Pfbを演算して出力する。
なお、重心位置Pfbの算出は、後述するステージの重心位置の調整において説明する。
図3は、本発明のステージ制御装置における重心位置の調整手順を示すフローチャートである。
(ステップ1:S1)
指令生成部4がステージ30を所望の移動(駆動)をさせるべく、絶対座標における位置指令を生成し、重心位置指令演算部5が機械的原点からみた重心位置指令Prefに座標変換し、前述のように多軸構成における各モータの推力指令Frefで各モータを駆動させ、ボード線図生成部2が各軸のボード線図を作成し、ステップ2に進む。
なお、ボード線図は後述する具体的な事例に示すように、X軸の重心位置指令Prefからθy軸またはθz軸の重心位置偏差Presまでのボード線図、Y軸の重心位置指令Prefからθx軸またはθz軸の重心位置偏差Presまでのボード線図、Z軸の重心位置指令Prefからθx軸またはθy軸の重心位置偏差Presまでのボード線図等である。
(ステップ2:S2)
ゲイン特性比較部3が、各軸のボード線図ゲイン特性の最大値と予め設定されたしきい値とを比較し、しきい値を越えていれば、重心位置がずれていると判断してステップ3に、ずれている軸がなければ調整を終了する。
ここでの各軸のボード線図ゲイン特性の最大値は、初期状態での重心位置ずれ値であり、後述する調整の過程で用いるため、初期値として格納しておく。
なお、しきい値は、モータおよび負荷を含む制御対象をモデル化して重心位置にずれがないボード線図ゲイン特性をシミュレーション等で予め算出しておき、これに基づいて決定してもよく、また、後述する調整の過程で、作成した各軸のボード線図ゲイン特性の最大値が最小となるような目安をしきい値としてもよい。
ゲイン特性比較部3が、作成した各軸のボード線図ゲイン特性の最大値から、重心位置がずれている軸の正方向の重心位置補正量を算出し、ステップ4に進む。
なお、重心位置補正量は、モータおよび負荷を含む制御対象をモデル化して重心位置にずれがある(例えば、0.1mmずれた場合、1mmずれた場合、10mmずれた場合等)ボード線図ゲイン特性をシミュレーション等で予め算出しておき、これに基づいて算出してもよく、また、作成した各軸のボード線図ゲイン特性の最大値としきい値との格差を目安として算出してもよい。
(ステップ4:S4)
重心位置演算部15が、センサ22の情報と前述したゲイン特性比較部3からの重心位置補正量とから重心位置Pfbを演算して重心位置を補正し、再度、ボード線図生成部2が各軸のボード線図を作成し、ステップ5に進む。
なお、ここで再度ボード線図を作成する際は、ステップ1と同じ位置指令でステージ30を駆動させる。
ゲイン特性比較部3が、再度作成した各軸のボード線図ゲイン特性の最大値(今回値)と前回値とを比較し、今回値が小さい場合ステップ6に、今回値が大きい場合ステップ8に進む。
(ステップ6:S6)
ゲイン特性比較部3が、再度作成した各軸のボード線図ゲイン特性の最大値(今回値)と予め設定されたしきい値とを比較し、今回値が大きい場合ステップ7に、今回値が小さい場合調整を終了する。
(ステップ7:S7)
ゲイン特性比較部3が、重心位置の前回と同方向の重心位置補正量を増加し、ステップ4移行の処理を繰り返す。
ゲイン特性比較部3が、重心位置の前回と同方向の重心位置補正量を減少し、ステップ9に進む。
(ステップ9:S9)
重心位置演算部15が、センサ22の情報と前述したゲイン特性比較部3からの重心位置補正量とから重心位置Pfbを演算して重心位置を補正し、再度、ボード線図生成部2が各軸のボード線図を作成し、ステップ10に進む。
(ステップ10:S10)
ゲイン特性比較部3が、再度作成した各軸のボード線図ゲイン特性の最大値とステップ2で格納しておいた初期値とを比較し、今回値が大きい場合ステップ11に、今回値が小さい場合ステップ5移行の処理を繰り返す。
(ステップ11:S11)
ゲイン特性比較部3が、重心位置がずれている軸の補正方向を正方向から負方向へ変更し、ステップ4移行の処理を繰り返す。
また、ステップ1から11までの一連の処理を、自動的に進めて重心位置の調整することも可能である。
先ず、ステージ30の重心位置がY軸方向にずれていた場合を考える。
この場合、X軸方向に推力を加えたとしてもθz軸方向にモーメント力が加わるため、X軸の重心位置指令Prefからθz軸の重心位置偏差Presまでのボード線図を生成すると、そのボード線図ゲイン特性の最大値から重心位置のずれ度合が分かり、前述の調整要領にしたがって、重心位置をY軸方向に正負可変させ調整することにより、重心位置のずれを補正することができる。
図4は、重心位置がY軸方向にずれていた場合のX軸からθz軸までのボード線図である。図において、重心位置のY軸方向のずれ量が0.1mm,1mm,10mmと増加すると、ボード線図ゲイン特性の最大値が大きくなっていることが分かる。ここでは、例えば、ゲイン−100dB以下となるように重心位置をY軸方向に正負可変させ調整すればよい。
図5は、重心位置がY軸方向にずれていた場合のZ軸からθx軸までのボード線図である。図において、重心位置のY軸方向のずれ量が0.1mm,1mm,10mmと増加すると、ボード線図ゲイン特性の最大値が大きくなっていることが分かる。ここでも、例えば、ゲイン−100dB以下となるように重心位置をY軸方向に正負可変させ調整すればよい。
この場合、Z軸方向に推力を加えたとしてもθy軸方向にモーメント力が加わるため、Z軸の重心位置指令Prefからθy軸の重心位置偏差Presまでのボード線図を生成すると、そのボード線図ゲイン特性の最大値から重心位置のずれ度合が分かり、前述の調整要領にしたがって、重心位置をX軸方向に正負可変させ調整することにより、重心位置のずれを補正することができる。
図6は、重心位置がX軸方向にずれていた場合のZ軸からθy軸までのボード線図である。図において、重心位置のX軸方向のずれ量が0.1mm,1mm,10mmと増加すると、ボード線図ゲイン特性の最大値が大きくなっていることが分かる。ここでは、例えば、ゲイン−50dB以下となるように重心位置をX軸方向に正負可変させ調整すればよい。
図7は、重心位置がX軸方向にずれていた場合のY軸からθz軸までのボード線図である。図において、重心位置のX軸方向のずれ量が0.1mm,1mm,10mmと増加すると、ボード線図ゲイン特性の最大値が大きくなっていることが分かる。ここでは、例えば、ゲイン−40dB以下となるように重心位置をX軸方向に正負可変させ調整すればよい。
この場合、X軸方向に推力を加えたとしてもθy軸方向にモーメント力が加わるため、X軸の重心位置指令Prefからθy軸の重心位置偏差Presまでのボード線図を生成すると、そのボード線図ゲイン特性の最大値から重心位置のずれ度合が分かり、前述の調整要領にしたがって、重心位置をZ軸方向に正負可変させ調整することにより、重心位置のずれを補正することができる。
図8は、重心位置がZ軸方向にずれていた場合のX軸からθy軸までのボード線図である。図において、重心位置のZ軸方向のずれ量が0.1mm,1mm,10mmと増加すると、ボード線図ゲイン特性の最大値が大きくなっていることが分かる。ここでは、例えば、ゲイン−40dB以下となるように重心位置をZ軸方向に正負可変させ調整すればよい。
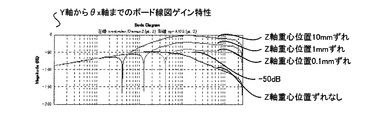
図9は、重心位置がZ軸方向にずれていた場合のY軸からθx軸までのボード線図である。図において、重心位置のZ軸方向のずれ量が0.1mm,1mm,10mmと増加すると、ボード線図ゲイン特性の最大値が大きくなっていることが分かる。ここでは、例えば、ゲイン−40dB以下となるように重心位置をZ軸方向に正負可変させ調整すればよい。
(ア)ステージ30の重心位置がY軸方向にずれていた場合、X軸の重心位置指令Prefからθz軸の重心位置偏差Presまで、または、Z軸の重心位置指令Prefからθx軸の重心位置偏差Presまで、のボード線図ゲイン特性の最大値からY軸方向の重心位置のずれ度合が分かり、重心位置をY軸方向に正負可変させ調整すればよい。
(イ)ステージ30の重心位置がX軸方向にずれていた場合、Z軸の重心位置指令Prefからθy軸の重心位置偏差Presまで、または、Y軸の重心位置指令Prefからθz軸の重心位置偏差Presまで、のボード線図ゲイン特性の最大値からX軸方向の重心位置のずれ度合が分かり、重心位置をX軸方向に正負可変させ調整すればよい。
(ウ)ステージ30の重心位置がZ軸方向にずれていた場合、X軸の重心位置指令Prefからθy軸の重心位置偏差Presまで、または、Y軸の重心位置指令Prefからθx軸の重心位置偏差Presまで、のボード線図ゲイン特性の最大値からZ軸方向の重心位置のずれ度合が分かり、重心位置をZ軸方向に正負可変させ調整すればよい。
重心位置偏差比較部7は、今回の重心位置偏差Pres(i)とメモリ6に保存している前回の重心位置偏差Pres(i−1)とを比較し、比較結果を出力する。
機械パラメータ調整部8は、比較結果に基づいて機械パラメータ(重心位置、質量、慣性モーメント)を調整する。すなわち、今回の重心位置偏差Pres(i)が前回の重心位置偏差Pres(i−1)より大きい場合、機械パラメータ(重心位置、質量、慣性モーメント)を前回値に戻す、あるいは、その極性を反転させる。一方、今回の重心位置偏差Pres(i)が前回の重心位置偏差Pres(i−1)より小さい場合、更に、機械パラメータ(重心位置、質量、慣性モーメント)の数値を大きくする。
図11は、本発明のステージ制御装置における機械パラメータ(重心位置、質量、慣性モーメント)の調整手順を示すフローチャートである。
(ステップ21:S21)
調整する機械パラメータ(重心位置か、質量または慣性モーメントか)を選択し、重心位置を選択した場合ステップ22に、質量または慣性モーメントを選択した場合ステップ23に進む。
(ステップ22:S22)
指令生成部4がステージ30を移動(駆動)させるべく、ステップ指令または速度台形指令を生成し、重心位置指令演算部5が機械的原点からみた重心位置指令Prefに座標変換し、前述のように多軸構成における各モータの推力指令Frefで各モータを駆動させ、ステップ24に進む。
(ステップ23:S23)
指令生成部4がステージ30を停止させるべく、停止指令を生成し、各モータを停止させ、ステップ24に進む。
位置制御部11が、重心位置指令Prefと重心位置Pfbとから重心位置偏差Presを算出してその重心位置偏差量がある場合ステップ25に、ない場合調整を終了する。
ここでの重心位置偏差量は、初期状態での重心位置あるいは質量あるいは慣性モーメントずれ値であり、後述する調整の過程で用いるため、初期値として格納しておく。
なお、重心位置偏差量のあるなしでの次ステップへ進む判断を説明したが、重心位置偏差量と設定されたしきい値との比較結果に基づいて次ステップへ進む判断をしてもよい。
(ステップ25:S25)
メモリ6が、重心位置偏差の初期値を保存し、ステップ26に進む。
(ステップ26:S26)
機械パラメータ調整部8が、ステップ21において選択した機械パラメータ(重心位置か、質量または慣性モーメントか)の数値を増加させ、ステップ27に進む。
位置制御部11が、ステップ26において変更した機械パラメータ(重心位置か、質量または慣性モーメントか)に応じて、ステップ22あるいはステップ23と同じ指令で動作した際の重心位置偏差Presを算出し、
重心位置偏差比較部7が、重心位置偏差Presの今回値と、メモリ6に格納された前回値とを比較し、今回値が小さい場合ステップ28に、今回値が大きい場合ステップ30に進む。
(ステップ28:S28)
重心位置偏差比較部7が、重心位置偏差Presの今回値と、零値または設定されたしきい値とを比較し、今回値がほぼ零値でないまたは設定されたしきい値より大きい場合ステップ29に、今回値がほぼ零値または設定されたしきい値より小さい場合調整を終了する。
(ステップ29:S29)
機械パラメータ調整部8が、ステップ26において増加した機械パラメータ(重心位置か、質量または慣性モーメントか)の数値を、更に増加させ、ステップ27移行の処理を繰り返す。
機械パラメータ調整部8が、ステップ26において増加した機械パラメータ(重心位置か、質量または慣性モーメントか)の増加分を減少させ、ステップ31に進む。
(ステップ31:S31)
位置制御部11が、ステップ26において変更した機械パラメータ(重心位置か、質量または慣性モーメントか)に応じて、ステップ22あるいはステップ23と同じ指令で動作した際の重心位置偏差Presを算出し、
重心位置偏差比較部7が、重心位置偏差Presの今回値と、メモリ6に格納された初期値とを比較し、今回値が大きい場合ステップ27に、今回値が小さい場合ステップ32に進む。
(ステップ32:S32)
機械パラメータ調整部8が、ステップ26において増加した機械パラメータ(重心位置か、質量または慣性モーメントか)の極性を逆にし、ステップ27移行の処理を繰り返す。
先ず、機械パラメータである質量が、実際の質量と1kgずれていた場合を考える。なお、機械パラメータである質量が実際の質量とずれていた場合は、Z軸の重心位置偏差量のずれ度合に比例する。この場合、図10における指令生成部4からの指令は停止指令であり、Z軸の重心位置偏差量から機械パラメータの質量と実際の質量とのずれ度合が分かり、前述の調整要領にしたがって、Z軸の重心位置偏差量がなくなるように、または、設定されたしきい値以下となるように、機械パラメータの質量を調整すればよい。
図12は、機械パラメータの質量と実際の質量とのずれが1kgである場合のZ軸の重心位置偏差である。ずれがある場合、初めに重力がかかるため、Z軸の重心位置偏差が生じており、ずれがない場合、Z軸の重心位置偏差は生じない(図示しない)。前述の調整要領にしたがって、Z軸の重心位置偏差Presの今回値と前回値との比較に基づき、機械パラメータの質量を調整すればよい。
なお、機械パラメータである慣性モーメントの調整についても同様の調整を行なえばよい。
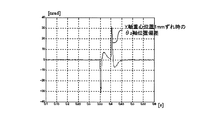
この場合、実施例1からも分かるように、X軸の重心位置指令Prefを与えればθz軸の重心位置偏差Presが生じ、または、Z軸の重心位置指令Prefを与えればθx軸の重心位置偏差Presが生じる。θz軸またはθx軸の重心位置偏差量からY軸方向の重心位置のずれ度合が分かり、前述の調整要領にしたがって、θz軸またはθx軸の重心位置偏差量がなくなるように、または、設定されたしきい値以下となるように、機械パラメータの重心位置を調整すればよい。
図13は、機械パラメータの重心位置すれがY軸方向に1mmある場合のθz軸の重心位置偏差である。ここで、X軸の重心位置指令Prefは、ステップ指令または速度台形指令等を与える。ずれがある場合、X軸の重心位置指令Prefが入力される0.35秒後にθz軸の重心位置偏差が生じており、ずれがない場合、θz軸の重心位置偏差は生じない(図示しない)。前述の調整要領にしたがって、重心位置偏差がなくなるように、または、設定されたしきい値以下となるように、機械パラメータの重心位置を調整すればよい。
なお、機械パラメータである重心位置が、X軸方向またはZ軸方向にずれていた場合の調整についても同様の調整を行なえばよい。
2 ボード線図生成部
3 ゲイン特性比較部
4 指令生成部
5 重心位置指令演算部
6 メモリ
7 重心位置偏差比較部
8 機械パラメータ調整部
11 位置制御部
12 速度制御部
13 モータ推力指令演算部
14 電流指令演算部
15 重心位置演算部
16 微分器
20 制御対象部
21 モータ
22 位置検出器
23 負荷
30 ステージ
31〜36 モータ
Pref 機械的原点からみた重心位置指令
Pfb 重心位置
Pres 重心位置偏差
Pres(i) 今回の重心位置偏差
Pres(i−1) 前回の重心位置偏差
Vref 重心速度速度指令
Vfb 重心速度
Fref 各モータの推力指令
FGref 重心の推力指令
Claims (19)
- 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御するステージ制御装置において、
複数軸のうち、ある1軸の前記重心位置指令から他の1軸の前記重心位置偏差までのボード線図ゲイン特性に基づいて、前記ステージの重心位置ずれを調整または補正する手段を備えたことを特徴とするステージ制御装置。 - 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御するステージ制御装置において、
複数軸のうち、ある1軸の前記重心位置指令による他の1軸へ加わるモーメント力に応じた前記ステージの重心位置ずれの度合いに基づいて、前記ステージの重心位置ずれを調整または補正する手段を備えたことを特徴とするステージ制御装置。 - 前記ステージ制御装置が、複数軸のうち、前記ある1軸の前記重心位置指令から前記他の1軸の前記重心位置偏差までのボード線図ゲイン特性を生成して、その最大値を出力するボード線図生成部と、
前記最大値と設定されたしきい値との比較結果に基づいて前記ステージの重心位置ずれを判断して、重心位置ずれがある場合に重心位置補正量を算出して出力するゲイン特性比較部と、
前記重心位置補正量に基づいて前記ステージの重心位置ずれを調整または補正する重心位置演算部と、を備えたことを特徴とする請求項1または2に記載のステージ制御装置。 - 前記ステージ制御装置が、更に、前記ボード線図ゲイン特性を表示する手段を備え、
表示された前記ボード線図ゲイン特性からその最大値を抽出して、前記ステージの重心位置ずれを調整または補正することを特徴とする請求項1または2に記載のステージ制御装置。 - 前記ステージ制御装置が、前記ある1軸の前記重心位置指令と前記他の1軸の前記重心位置偏差とを出力し、
前記ボード線図生成部の代わりに、前記ある1軸の前記重心位置指令と前記他の1軸の前記重心位置偏差とから、前記ボード線図ゲイン特性を生成および表示する手段を備え、
生成および表示された前記ボード線図ゲイン特性から前記最大値を抽出して、前記ステージの重心位置ずれを調整または補正することを特徴とする請求項3に記載のステージ制御装置。 - 前記ゲイン特性比較部が、前記ステージの重心位置ずれがある場合、前記ある1軸の正または負方向の前記重心位置補正量を算出し、前記重心位置補正量に基づいて算出した新たなボード線図ゲイン特性の最大値を今回値として、前記今回値と前回値または前記設定されたしきい値との比較結果に基づいて、次回の重心位置補正量の補正方向とその量を決定することを特徴とする請求項3に記載のステージ制御装置。
- 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御するステージ制御装置の重心位置補正方法において、
複数軸のうち、ある1軸の前記重心位置指令から他の1軸の前記重心位置偏差までのボード線図ゲイン特性を生成し、
前記ボード線図ゲイン特性を用いて、前記ステージの重心位置ずれを調整または補正する処理をすることを特徴とするステージ制御装置の重心位置補正方法。 - 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御するステージ制御装置の重心位置補正方法において、
複数軸のうち、ある1軸の前記重心位置指令による他の1軸へのモーメント力に応じた前記ステージの重心位置ずれの度合いに基づいて、前記ステージの重心位置ずれを調整または補正する処理をすることを特徴とするステージ制御装置の重心位置補正方法。 - 前記ステージの重心位置ずれを調整または補正する処理は、複数軸のうち、前記ある1軸の前記重心位置指令から前記他の1軸の前記重心位置偏差までのボード線図ゲイン特性を生成してその最大値を出力する、ボード線図ゲイン特性生成処理をし、
前記最大値と設定されたしきい値との比較結果に基づいて前記ステージの重心位置ずれを判断する、重心位置ずれ判断処理をし、
重心位置ずれがある場合に重心位置補正量を算出して出力する、重心位置補正処理をし、
前記重心位置補正量に基づいて前記ステージの重心位置ずれを調整または補正する、ことを特徴とする請求項7または8に記載のステージ制御装置の重心位置補正方法。 - 前記ステージの重心位置ずれがある場合、前記ある1軸の正または負方向の前記重心位置補正量を算出し、
前記重心位置補正量に基づいて算出した新たなボード線図ゲイン特性の最大値を今回値として、前記今回値と前回値または前記設定されたしきい値との比較結果に基づいて、次回の重心位置補正量の補正方向とその量を決定する、ことを特徴とする請求項9に記載のステージ制御装置の重心位置補正方法。 - 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御し、かつ、前記ステージの質量、慣性モーメント、重心位置である機械パラメータを調整するステージ制御装置において、
前記ステージのXYZ方向のうち、Z方向の前記重心位置偏差に基づいて前記質量または前記慣性モーメントを調整する、または、複数軸のうち、ある1軸の前記重心位置指令を与えた際の他の1軸の前記重心位置偏差に基づいて前記重心位置を調整する、手段を備えたことを特徴とするステージ制御装置。 - 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御し、かつ、前記ステージの質量、慣性モーメント、重心位置である機械パラメータを調整するステージ制御装置において、
前記ステージのXYZ方向のうち、Z方向の前記重心位置偏差に基づいて前記質量または前記慣性モーメントを調整する、または、複数軸のうち、ある1軸の前記重心位置指令による他の1軸へ加わるモーメント力に応じた前記重心位置ずれの度合いに基づいて前記重心位置を調整する、手段を備えたことを特徴とするステージ制御装置。 - 前記指令生成部が、前記質量または前記慣性モーメントを調整する場合、停止指令を発生し、
前記重心位置を調整する場合、単軸または複数軸のステップ指令を発生することを特徴とする請求項11または12に記載のステージ制御装置。 - 前記ステージ制御装置が、前記Z方向の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記質量または前記慣性モーメントのずれを判断する、または、前記他の1軸の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記重心位置のずれを判断する、前記重心位置偏差比較部と、
前記機械パラメータの各数値を、前記重心位置偏差比較部の判断結果に基づいて増減させる機械パラメータ調整部と、
前記重心位置偏差比較部の判断結果に基づいて前記重心位置を調整する重心位置演算部と、を備えたことを特徴とする請求項11または12に記載のステージ制御装置。 - 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御し、かつ、前記ステージの質量、慣性モーメント、重心位置である機械パラメータを調整するステージ制御装置の機械パラメータ調整方法において、
前記ステージのXYZ方向のうち、Z方向の前記重心位置偏差に基づいて前記質量または前記慣性モーメントを調整する処理、または、複数軸のうち、ある1軸の前記重心位置指令を与えた際の他の1軸の前記重心位置偏差に基づいて前記重心位置を調整する処理、をすることを特徴とするステージ制御装置の機械パラメータ調整方法。 - 絶対座標における位置指令を生成して出力する指令生成部と、前記位置指令を機械的原点からみた重心位置指令に座標変換する重心位置指令演算部とを備え、センサの出力信号に基づいたステージの重心位置と前記重心位置指令との差である重心位置偏差に基づいてモータを駆動して、複数の前記モータを有する複数軸構成のステージを制御し、かつ、前記ステージの質量、慣性モーメント、重心位置である機械パラメータを調整するステージ制御装置の機械パラメータ調整方法において、
前記ステージのXYZ方向のうち、Z方向の前記重心位置偏差に基づいて前記質量または前記慣性モーメントを調整する処理、または、複数軸のうち、ある1軸の前記重心位置指令による他の1軸へ加わるモーメント力に応じた前記重心位置ずれの度合いに基づいて前記重心位置を調整する処理、をすることを特徴とするステージ制御装置の機械パラメータ調整方法。 - 前記質量または前記慣性モーメントを調整する処理の場合、停止指令を発生し、
前記重心位置を調整する処理の場合、単軸または複数軸のステップ指令を発生することを特徴とする請求項15または16に記載のステージ制御装置の機械パラメータ調整方法。 - 前記質量または前記慣性モーメントを調整する処理は、前記Z方向の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記質量または前記慣性モーメントのずれを判断し、その判断結果に基づいて前記質量または前記慣性モーメントの各数値を、増減させて前記質量または前記慣性モーメントを調整する、ことを特徴とする請求項15または16に記載のステージ制御装置の重心位置補正方法。
- 前記重心位置を調整する処理は、前記他の1軸の前記重心位置偏差の今回値と前回値との比較結果に基づいて前記重心位置のずれを判断し、その判断結果に基づいて前記重心位置の数値を、増減させて前記重心位置を調整する、ことを特徴とする請求項15または16に記載のステージ制御装置の重心位置補正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006340805A JP2008152603A (ja) | 2006-12-19 | 2006-12-19 | ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006340805A JP2008152603A (ja) | 2006-12-19 | 2006-12-19 | ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008152603A true JP2008152603A (ja) | 2008-07-03 |
| JP2008152603A5 JP2008152603A5 (ja) | 2009-08-06 |
Family
ID=39654698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006340805A Pending JP2008152603A (ja) | 2006-12-19 | 2006-12-19 | ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008152603A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114608693A (zh) * | 2022-03-09 | 2022-06-10 | 上海华兴数字科技有限公司 | 一种称重平台的标定方法、装置及高空作业车 |
| CN120930380A (zh) * | 2025-10-13 | 2025-11-11 | 广东威泰电力工程有限公司 | 一种电力工程施工仿真方法及系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10116120A (ja) * | 1996-10-09 | 1998-05-06 | Canon Inc | 微動位置決め制御装置 |
| JPH11327653A (ja) * | 1998-05-20 | 1999-11-26 | Hyogo Prefecture | 磁気浮上体の位置決め装置 |
-
2006
- 2006-12-19 JP JP2006340805A patent/JP2008152603A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10116120A (ja) * | 1996-10-09 | 1998-05-06 | Canon Inc | 微動位置決め制御装置 |
| JPH11327653A (ja) * | 1998-05-20 | 1999-11-26 | Hyogo Prefecture | 磁気浮上体の位置決め装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114608693A (zh) * | 2022-03-09 | 2022-06-10 | 上海华兴数字科技有限公司 | 一种称重平台的标定方法、装置及高空作业车 |
| CN120930380A (zh) * | 2025-10-13 | 2025-11-11 | 广东威泰电力工程有限公司 | 一种电力工程施工仿真方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5327722B2 (ja) | ロボットの負荷推定装置及び負荷推定方法 | |
| JP4850956B2 (ja) | 学習制御機能を備えたロボット | |
| US9724825B2 (en) | Robot controller for robot which sets two objects in combined state | |
| CN109202894B (zh) | 进行学习控制的机器人及其控制方法 | |
| US9555548B2 (en) | Robot control device for controlling robot moved according to applied force | |
| KR101688344B1 (ko) | 다관절 로봇의 위빙 제어 장치 | |
| EP1505463B1 (en) | Position control device and position control method for machine tools | |
| WO2012057235A1 (ja) | 数値制御方法 | |
| CN109085802B (zh) | 电动机的控制装置 | |
| EP1023973B1 (en) | Robot control method and device | |
| JP4453526B2 (ja) | サーボ制御装置 | |
| CN106003019A (zh) | 机器人控制装置、机器人系统以及机器人控制方法 | |
| JP4226420B2 (ja) | 位置制御装置 | |
| JP5441944B2 (ja) | モータ制御装置 | |
| JP2016032326A (ja) | モータ制御装置、ロボット装置、モータ制御方法、プログラム及び記録媒体 | |
| JP4196400B2 (ja) | モータの制御装置及び制御方法 | |
| CN110869171B (zh) | 机器人控制装置 | |
| WO2007046257A1 (ja) | モータ制御装置及び方法及びプログラム記憶媒体 | |
| US20190302729A1 (en) | Numerical control device | |
| JPWO2009025132A1 (ja) | モータ制御装置とその慣性モーメント同定方法 | |
| JP2008152603A (ja) | ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法 | |
| JPWO2008093486A1 (ja) | 慣性モーメント同定装置とその同定方法、ならびにその同定装置を備えたモータ制御装置 | |
| JP4137321B2 (ja) | 移動装置 | |
| JP6048174B2 (ja) | 数値制御装置とロストモーション補償方法 | |
| JP4507071B2 (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090619 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090619 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100510 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100913 |