JP2009009301A - プラント運転支援装置 - Google Patents
プラント運転支援装置 Download PDFInfo
- Publication number
- JP2009009301A JP2009009301A JP2007169215A JP2007169215A JP2009009301A JP 2009009301 A JP2009009301 A JP 2009009301A JP 2007169215 A JP2007169215 A JP 2007169215A JP 2007169215 A JP2007169215 A JP 2007169215A JP 2009009301 A JP2009009301 A JP 2009009301A
- Authority
- JP
- Japan
- Prior art keywords
- virtual
- data
- plant
- simulation
- prediction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Landscapes
- Testing And Monitoring For Control Systems (AREA)
Abstract
【解決手段】将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、記憶部と、表示部と、実際の時間よりも早い速度で予測シミュレーションが行われて予測され前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行い複数の仮想データをそれぞれ求める演算制御部とを備える。
【選択図】 図1
Description
従って本発明が解決しようとする課題は、複数の仮想操作開始時刻における仮想シミュレーションを同時に行い、仮想操作条件と仮想データとの関係を容易に把握することが可能なプラント運転支援装置を実現することにある。
将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、
記憶部と、表示部と、実際の時間よりも早い速度で予測シミュレーションが行われて予測され前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行って複数の仮想データをそれぞれ求める演算制御部とを備えることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項1記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記仮想データの一つである第2の初期データに基づいて、実際の時間よりも早い速度で第2の仮想シミュレーションを行い第2の仮想データをそれぞれ求めることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項1記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記予測シミュレーションを行い複数の予測データをそれぞれ求め、複数の前記仮想操作開始時刻における複数の前記予測データを複数の前記初期データとして前記記憶部に記憶し、複数の前記初期データに基づいて前記仮想シミュレーションを行い複数の前記仮想操作開始時刻で複数の前記仮想データをそれぞれ求める予測シミュレータとから構成されることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項2記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記仮想シミュレーションが行われて予測され第2の仮想操作開始時刻における複数の前記仮想データの一つを前記第2の初期データとして前記記憶部に記憶し、前記第2の初期データに基づいて前記第2の仮想シミュレーションを行い前記第2の仮想操作開始時刻で前記第2の仮想データをそれぞれ求める予測シミュレータとから構成されることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、
記憶部と、表示部と、プラントから出力される実測値に基づき前記プラントの動作と並行してリアルタイムに行われるトラッキングシミュレーションを行って推定データをそれぞれ求め、前記推定データを用いて実際の時間よりも早い速度で予測シミュレーションが行われて予測される前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行い複数の仮想データをそれぞれ求める演算制御部とを備えることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項5記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記仮想データの一つである第2の初期データに基づいて、実際の時間よりも早い速度で第2の仮想シミュレーションを行い第2の仮想データをそれぞれ求めることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項5記載の発明であるプラント運転支援装置において、
前記演算制御部が、プラントから出力される実測値に基づき前記トラッキングシミュレーションを行い推定データを求めるトラッキングシミュレータと、前記推定データに基づき前記予測シミュレーションを行い複数の前記予測データをそれぞれ求め、複数の前記仮想操作開始時刻における複数の前記予測データを複数の前記初期データとして前記記憶部に記憶し、複数の前記初期データに基づいて前記仮想シミュレーションを行い複数の前記仮想操作開始時刻で複数の前記仮想データをそれぞれ求める予測シミュレータとから構成されることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項7記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記仮想シミュレーションが行われて予測される第2の仮想操作開始時刻における複数の前記仮想データの一つを前記第2の初期データとして前記記憶部に記憶し、前記第2の初期データに基づいて前記第2の仮想シミュレーションを行い前記第2の仮想操作開始時刻で前記第2の仮想データをそれぞれ求める予測シミュレータとから構成されることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、
記憶部と、表示部と、プラントから出力される実測値に基づき前記プラントの動作と並行してリアルタイムに行われるトラッキングシミュレーションを行って求められ前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行い複数の仮想データをそれぞれ求める演算制御部とを備えることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項9記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記仮想データの一つである第2の初期データに基づいて、実際の時間よりも早い速度で第2の仮想シミュレーションを行い第2の仮想データをそれぞれ求めることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項9記載の発明であるプラント運転支援装置において、
前記演算制御部が、プラントから出力される実測値に基づき前記トラッキングシミュレーションを行い推定データを求めるトラッキングシミュレータと、複数の前記仮想操作開始時刻における複数の前記推定データを複数の前記初期データとして前記記憶部に記憶し、複数の前記初期データに基づいて前記仮想シミュレーションを行い複数の前記仮想操作開始時刻で複数の前記仮想データをそれぞれ求める予測シミュレータとから構成されることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項10記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記仮想シミュレーションが行われて予測される第2の仮想操作開始時刻における複数の前記仮想データの一つを前記第2の初期データとして前記記憶部に記憶し、前記第2の初期データに基づいて前記第2の仮想シミュレーションを行い前記第2の仮想操作開始時刻で前記第2の仮想データをそれぞれ求める予測シミュレータとから構成されることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行うことが可能になる。
請求項1乃至請求項12のいずれかに記載の発明であるプラント運転支援装置において、
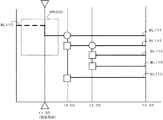
互いに関係する複数の仮想操作条件に基づく仮想シミュレーションの進行状態を表す仮想操作直線をツリー形式で表す操作情報画面を前記表示部に表示させることにより、仮想操作条件と仮想データとの関係を容易に把握することが可能になる。
請求項13記載の発明であるプラント運転支援装置において、
前記演算制御部が、前記操作情報画面を前記表示部に表示させると共に前記実測値、前記推定データ、前記予測データ、複数の前記仮想データ及び前記第2の仮想データをそれぞれ時系列に表すトレンドグラフを前記表示部に表示させる表示制御部を有することにより、仮想操作条件と仮想データとの関係を容易に把握することが可能になる。
請求項1、2、3、4、5、6、7、8、9、10、11、12、13及び請求項14の発明によれば、
予測シミュレータが予測シミュレーションにより予測され記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、仮想シミュレーションを実施して複数の仮想操作開始時刻で複数の仮想操作が実施される場合の複数の仮想データをそれぞれ求め、仮想シミュレーションにより予測され記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、仮想シミュレーションを実施して複数の仮想データをそれぞれ求め表示制御部が互いに関係する複数の仮想操作条件に基づく仮想操作直線をツリー形式にして操作情報画面に表示させることにより、複数の仮想操作開始時刻における仮想シミュレーションを同時に行い、仮想操作条件と仮想データとの関係を容易に把握することが可能になる。
2、10 通信部
3、11 トラッキングシミュレータ
4、12 予測シミュレータ
5、13 記憶部
6、14 表示制御部
7、15 表示部
8、16 入力部
50、150 演算制御部
100、200 プラント運転支援装置
Claims (14)
- 将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、
記憶部と、
表示部と、
実際の時間よりも早い速度で予測シミュレーションが行われて予測され前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行い複数の仮想データをそれぞれ求める演算制御部と
を備えることを特徴とするプラント運転支援装置。 - 前記演算制御部が、
前記仮想データの一つである第2の初期データに基づいて、実際の時間よりも早い速度で第2の仮想シミュレーションを行い第2の仮想データをそれぞれ求めることを特徴とする
請求項1記載のプラント運転支援装置。 - 前記演算制御部が、
前記予測シミュレーションを行い複数の予測データをそれぞれ求め、複数の前記仮想操作開始時刻における複数の前記予測データを複数の前記初期データとして前記記憶部に記憶し、複数の前記初期データに基づいて前記仮想シミュレーションを行い複数の前記仮想操作開始時刻で複数の前記仮想データをそれぞれ求める予測シミュレータとから構成されることを特徴とする
請求項1記載のプラント運転支援装置。 - 前記演算制御部が、
前記仮想シミュレーションが行われて予測され第2の仮想操作開始時刻における複数の前記仮想データの一つを前記第2の初期データとして前記記憶部に記憶し、前記第2の初期データに基づいて前記第2の仮想シミュレーションを行い前記第2の仮想操作開始時刻で前記第2の仮想データをそれぞれ求める予測シミュレータとから構成されることを特徴とする
請求項2記載のプラント運転支援装置。 - 将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、
記憶部と、
表示部と、
プラントから出力される実測値に基づき前記プラントの動作と並行してリアルタイムに行われるトラッキングシミュレーションを行って推定データを求め、前記推定データを用いて実際の時間よりも早い速度で予測シミュレーションが行われて予測される前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行い複数の仮想データをそれぞれ求める演算制御部と
を備えることを特徴とするプラント運転支援装置。 - 前記演算制御部が、
前記仮想データの一つである第2の初期データに基づいて、実際の時間よりも早い速度で第2の仮想シミュレーションを行い第2の仮想データをそれぞれ求めることを特徴とする
請求項5記載のプラント運転支援装置。 - 前記演算制御部が、
プラントから出力される実測値に基づき前記トラッキングシミュレーションを行い推定データを求めるトラッキングシミュレータと、
前記推定データに基づき前記予測シミュレーションを行い複数の前記予測データをそれぞれ求め、複数の前記仮想操作開始時刻における複数の前記予測データを複数の前記初期データとして前記記憶部に記憶し、複数の前記初期データに基づいて前記仮想シミュレーションを行い複数の前記仮想操作開始時刻で複数の前記仮想データをそれぞれ求める予測シミュレータとから構成されることを特徴とする
請求項5記載のプラント運転支援装置。 - 前記演算制御部が、
前記仮想シミュレーションが行われて予測される第2の仮想操作開始時刻における複数の前記仮想データの一つを前記第2の初期データとして前記記憶部に記憶し、前記第2の初期データに基づいて前記第2の仮想シミュレーションを行い前記第2の仮想操作開始時刻で前記第2の仮想データをそれぞれ求める予測シミュレータとから構成されることを特徴とする
請求項6記載のプラント運転支援装置。 - 将来のある時刻で仮想操作を実施した場合のプラントの動作をシミュレーションにより予測するプラント運転支援装置において、
記憶部と、
表示部と、
プラントから出力される実測値に基づき前記プラントの動作と並行してリアルタイムに行われるトラッキングシミュレーションを行って求められ前記記憶部に記憶される複数の仮想操作開始時刻における複数の初期データに基づいて、実際の時間よりも早い速度で仮想シミュレーションを行い複数の仮想データをそれぞれ求める演算制御部と
を備えることを特徴とするプラント運転支援装置。 - 前記演算制御部が、
前記仮想データの一つである第2の初期データに基づいて、実際の時間よりも早い速度で第2の仮想シミュレーションを行い第2の仮想データをそれぞれ求めることを特徴とする
請求項9記載のプラント運転支援装置。 - 前記演算制御部が、
プラントから出力される実測値に基づき前記トラッキングシミュレーションを行い推定データを求めるトラッキングシミュレータと、
複数の前記仮想操作開始時刻における複数の前記推定データを複数の前記初期データとして前記記憶部に記憶し、複数の前記初期データに基づいて前記仮想シミュレーションを行い複数の前記仮想操作開始時刻で複数の前記仮想データをそれぞれ求める予測シミュレータとから構成されることを特徴とする
請求項9記載のプラント運転支援装置。 - 前記演算制御部が、
前記仮想シミュレーションが行われて予測される第2の仮想操作開始時刻における複数の前記仮想データの一つを前記第2の初期データとして前記記憶部に記憶し、前記第2の初期データに基づいて前記第2の仮想シミュレーションを行い前記第2の仮想操作開始時刻で前記第2の仮想データをそれぞれ求める予測シミュレータとから構成されることを特徴とする
請求項10記載のプラント運転支援装置。 - 前記演算制御部が、
互いに関係する複数の仮想操作条件に基づく仮想シミュレーションの進行状態を表す仮想操作直線をツリー形式で表す操作情報画面を前記表示部に表示させることを特徴とする
請求項1乃至請求項12のいずれかに記載のプラント運転支援装置。 - 前記演算制御部が、
前記操作情報画面を前記表示部に表示させると共に前記実測値、前記推定データ、前記予測データ、複数の前記仮想データ及び前記第2の仮想データをそれぞれ時系列に表すトレンドグラフを前記表示部に表示させる表示制御部を有することを特徴とする
請求項13記載のプラント運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007169215A JP5061752B2 (ja) | 2007-06-27 | 2007-06-27 | プラント運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007169215A JP5061752B2 (ja) | 2007-06-27 | 2007-06-27 | プラント運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009009301A true JP2009009301A (ja) | 2009-01-15 |
| JP5061752B2 JP5061752B2 (ja) | 2012-10-31 |
Family
ID=40324335
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007169215A Expired - Fee Related JP5061752B2 (ja) | 2007-06-27 | 2007-06-27 | プラント運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5061752B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014106651A (ja) * | 2012-11-26 | 2014-06-09 | Mitsubishi Heavy Ind Ltd | プラント運転支援装置およびプラント運転支援方法 |
| JP2014525088A (ja) * | 2011-07-11 | 2014-09-25 | メッツォ オートメーション オイ | 産業プロセスを監視する方法 |
| JP2017004278A (ja) * | 2015-06-11 | 2017-01-05 | 横河電機株式会社 | プラント運転支援装置、プラント運転支援方法、及びプログラム |
| JP2021174397A (ja) * | 2020-04-28 | 2021-11-01 | 横河電機株式会社 | 制御支援装置、制御支援方法、制御支援プログラム、および制御システム |
| CN115407730A (zh) * | 2021-05-28 | 2022-11-29 | 横河电机株式会社 | 信息处理装置、显示控制方法和计算机可读存储介质 |
| CN115407729A (zh) * | 2021-05-28 | 2022-11-29 | 横河电机株式会社 | 信息处理装置、警报预测方法和计算机可读存储介质 |
| CN115407728A (zh) * | 2021-05-28 | 2022-11-29 | 横河电机株式会社 | 信息处理装置、预测方法和计算机可读存储介质 |
| DE102022208870A1 (de) | 2021-08-31 | 2023-03-02 | Yokogawa Electric Corporation | Informations-Verarbeitungsvorrichtung, Rechenverfahren und Rechenprogramm |
| WO2024080088A1 (ja) * | 2022-10-13 | 2024-04-18 | 住友重機械工業株式会社 | 支援装置、支援方法及びプログラム |
| US12292730B2 (en) | 2021-08-31 | 2025-05-06 | Yokogawa Electric Corporation | Information processing device, evaluation method, and computer-readable recording medium |
| WO2025159193A1 (ja) * | 2024-01-24 | 2025-07-31 | 株式会社Abeja | 行動ベースド支援システム及びプログラム格納媒体 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0667631A (ja) * | 1992-08-24 | 1994-03-11 | Hitachi Ltd | シミュレーション条件変更の系統的管理方法および装置 |
| JPH0965572A (ja) * | 1995-08-23 | 1997-03-07 | Matsushita Electric Ind Co Ltd | 電力系統解析装置 |
| JPH11353303A (ja) * | 1998-06-09 | 1999-12-24 | Hitachi Ltd | シミュレーション並列実行方法および装置 |
| JP2007115176A (ja) * | 2005-10-24 | 2007-05-10 | Yokogawa Electric Corp | プラント運転支援装置 |
-
2007
- 2007-06-27 JP JP2007169215A patent/JP5061752B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0667631A (ja) * | 1992-08-24 | 1994-03-11 | Hitachi Ltd | シミュレーション条件変更の系統的管理方法および装置 |
| JPH0965572A (ja) * | 1995-08-23 | 1997-03-07 | Matsushita Electric Ind Co Ltd | 電力系統解析装置 |
| JPH11353303A (ja) * | 1998-06-09 | 1999-12-24 | Hitachi Ltd | シミュレーション並列実行方法および装置 |
| JP2007115176A (ja) * | 2005-10-24 | 2007-05-10 | Yokogawa Electric Corp | プラント運転支援装置 |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014525088A (ja) * | 2011-07-11 | 2014-09-25 | メッツォ オートメーション オイ | 産業プロセスを監視する方法 |
| US9733626B2 (en) | 2011-07-11 | 2017-08-15 | Valmet Automation Oy | Method of monitoring an industrial process |
| JP2014106651A (ja) * | 2012-11-26 | 2014-06-09 | Mitsubishi Heavy Ind Ltd | プラント運転支援装置およびプラント運転支援方法 |
| JP2017004278A (ja) * | 2015-06-11 | 2017-01-05 | 横河電機株式会社 | プラント運転支援装置、プラント運転支援方法、及びプログラム |
| US10768590B2 (en) | 2015-06-11 | 2020-09-08 | Yokogawa Electric Corporation | Plant operation support device, plant operation support method, and a program device |
| JP7392566B2 (ja) | 2020-04-28 | 2023-12-06 | 横河電機株式会社 | 制御支援装置、制御支援方法、制御支援プログラム、および制御システム |
| US12210328B2 (en) | 2020-04-28 | 2025-01-28 | Yokogawa Electric Corporation | Control support apparatus, control support method, computer readable medium with control support program recorded thereon and control system |
| JP2021174397A (ja) * | 2020-04-28 | 2021-11-01 | 横河電機株式会社 | 制御支援装置、制御支援方法、制御支援プログラム、および制御システム |
| CN115407729A (zh) * | 2021-05-28 | 2022-11-29 | 横河电机株式会社 | 信息处理装置、警报预测方法和计算机可读存储介质 |
| CN115407728A (zh) * | 2021-05-28 | 2022-11-29 | 横河电机株式会社 | 信息处理装置、预测方法和计算机可读存储介质 |
| US20220383723A1 (en) * | 2021-05-28 | 2022-12-01 | Yokogawa Electric Corporation | Information processing device, alarm prediction method, and computer-readable recording medium |
| JP2022182622A (ja) * | 2021-05-28 | 2022-12-08 | 横河電機株式会社 | 情報処理装置、アラーム予測方法およびアラーム予測プログラム |
| JP2022182620A (ja) * | 2021-05-28 | 2022-12-08 | 横河電機株式会社 | 情報処理装置、予測方法および予測プログラム |
| JP2022182621A (ja) * | 2021-05-28 | 2022-12-08 | 横河電機株式会社 | 情報処理装置、表示制御方法および表示制御プログラム |
| CN115407729B (zh) * | 2021-05-28 | 2025-10-28 | 横河电机株式会社 | 信息处理装置、警报预测方法和计算机可读存储介质 |
| CN115407730A (zh) * | 2021-05-28 | 2022-11-29 | 横河电机株式会社 | 信息处理装置、显示控制方法和计算机可读存储介质 |
| JP7416015B2 (ja) | 2021-05-28 | 2024-01-17 | 横河電機株式会社 | 情報処理装置、アラーム予測方法およびアラーム予測プログラム |
| US11893869B2 (en) | 2021-05-28 | 2024-02-06 | Yokogawa Electric Corporation | Information processing device, alarm prediction method, and computer-readable recording medium |
| CN115729172A (zh) * | 2021-08-31 | 2023-03-03 | 横河电机株式会社 | 信息处理装置、预测方法以及计算机可读取的存储介质 |
| US12292730B2 (en) | 2021-08-31 | 2025-05-06 | Yokogawa Electric Corporation | Information processing device, evaluation method, and computer-readable recording medium |
| DE102022208870A1 (de) | 2021-08-31 | 2023-03-02 | Yokogawa Electric Corporation | Informations-Verarbeitungsvorrichtung, Rechenverfahren und Rechenprogramm |
| WO2024080088A1 (ja) * | 2022-10-13 | 2024-04-18 | 住友重機械工業株式会社 | 支援装置、支援方法及びプログラム |
| WO2025159193A1 (ja) * | 2024-01-24 | 2025-07-31 | 株式会社Abeja | 行動ベースド支援システム及びプログラム格納媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5061752B2 (ja) | 2012-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5061752B2 (ja) | プラント運転支援装置 | |
| JP7105556B2 (ja) | プラント管理システム及び管理装置 | |
| US20160079756A1 (en) | Production energy management system and computer program | |
| CN111796560B (zh) | 工厂运转支持系统和工厂运转支持方法 | |
| JP6078951B2 (ja) | トレンドグラフ表示装置 | |
| JPWO2019159280A1 (ja) | プラント運転条件設定支援システム、学習装置、及び運転条件設定支援装置 | |
| JP2022182620A (ja) | 情報処理装置、予測方法および予測プログラム | |
| JP5077831B2 (ja) | プラント制御システムおよびプラント制御方法 | |
| JP2010244159A (ja) | プラント運転支援装置 | |
| JP5239686B2 (ja) | プロセス推定システムおよびプロセス推定方法 | |
| JP2007115176A (ja) | プラント運転支援装置 | |
| WO2017141884A1 (ja) | 制御装置、制御システム、制御方法及びコンピュータ読み取り可能記録媒体 | |
| JP2022182621A (ja) | 情報処理装置、表示制御方法および表示制御プログラム | |
| JP5561519B2 (ja) | プラントシミュレータ | |
| JP7416015B2 (ja) | 情報処理装置、アラーム予測方法およびアラーム予測プログラム | |
| JP7525032B1 (ja) | 性能評価装置、性能評価方法、及びプログラム | |
| JP5278082B2 (ja) | シミュレーションシステム | |
| JP2011008376A (ja) | プロセス制御システムにおける制御プログラム生成装置及びプロセス制御方法 | |
| JP4687992B2 (ja) | プラント運転支援装置 | |
| JP2014164063A (ja) | プラント運転教育支援装置 | |
| JP5614630B2 (ja) | プラント運転支援装置及びプラント運転支援方法 | |
| JP5856875B2 (ja) | 制御ループ設計装置および制御ループ設計方法 | |
| Chowdhary | Application of self-tuning High-fidelity Dynamic Simulation model for Soft-sensing. | |
| JP2011086305A (ja) | プラント運転支援装置 | |
| JP2010122343A (ja) | プラント情報表示装置とプラント操作方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100420 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120710 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120723 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5061752 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150817 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |