JP2009023087A - 産業用ロボットの手持操作器およびロボット制御システム - Google Patents
産業用ロボットの手持操作器およびロボット制御システム Download PDFInfo
- Publication number
- JP2009023087A JP2009023087A JP2008269987A JP2008269987A JP2009023087A JP 2009023087 A JP2009023087 A JP 2009023087A JP 2008269987 A JP2008269987 A JP 2008269987A JP 2008269987 A JP2008269987 A JP 2008269987A JP 2009023087 A JP2009023087 A JP 2009023087A
- Authority
- JP
- Japan
- Prior art keywords
- hand
- cursor
- industrial robot
- operating device
- keys
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
- Input From Keyboards Or The Like (AREA)
Abstract
作業者が手持操作器を両手で保持したまま、親指だけでその操作の多くを実行できる手持操作器を提供する。
【解決手段】
表示画面(4)の下部に操作入力手段(5)を備え、操作入力手段(5)の左右の側部に把持部(6)を備え、左右の把持部(6)をそれぞれ作業者の左手および右手で把持した時に、前記作業者の左手および右手の親指が届く範囲に十字カーソルキー(7)と選択キー(8)を備える。両手で手持操作器を保持したまま操作できるので、作業者の疲労が少なく、また手ブレも少ないので表示画面(4)を視認しやすい。
【選択図】図1
Description
請求項1に記載の発明は、操作メニューを表示する表示画面が少なくとも設けられた上部と、左右の側部に把持部が設けられた下部と、を備え、前記上部と前記下部とが、前記上部の下側部および前記下部の上側部に設けられた滑らかなくびれ部によって接続され、前記下部の幅が前記上部の幅よりも狭い産業用ロボットの手持操作器であって、作業者が、手の第2指から第5指を前記把持部の裏面に添え、掌を前記把持部の表面に当てがって把持した時に、前記表示画面に表示されたカーソルを移動させる4個のキーは、前記くびれ部近傍かつ前記作業者の左手親指が届く範囲に配置され、前記カーソルで指定された前記操作メニュー項目の実行を入力する選択キーは、前記くびれ部近傍かつ前記作業者の右手親指が届く範囲に配置される産業用ロボットの手持操作器において、入出力を制御する中央演算部と、前記カーソルの移動を行うカーソル制御部と、前記操作メニュー表示の為のフォントデータを持ち、前記中央演算部の指令により前記操作メニューの制御を行うメニュー制御部と、前記中央演算部、前カーソル制御部、および前メニュー制御部の指令により、画像を前記表示画面に出力する表示制御部と、を備えたことを特徴とするものである。
請求項2に記載の発明は、操作メニューを表示する表示画面と、前記表示画面に表示されるカーソルを移動させる4個のキーと前記カーソルで指定された前記操作メニュー項目の実行を入力する選択キーとを含む操作入力手段と、左右の側部に配置された把持部と、を備えた産業用ロボットの手持操作器において、前記4個のキーは、左右の前記把持部をそれぞれ作業者の左手および右手で把持した時に、前記作業者の左手親指が届く範囲に配置され、マニピュレータの軸動作を入力する機能を持つことを特徴とするものである。
請求項3に記載の発明は、前記4個のキーは、十字カーソルキーであることを特徴とするものである。
請求項4に記載の発明は、前記4個のキーは、略十字型にスイッチが配置されたカーソルキーであることを特徴とするものである。
請求項5に記載の発明は、左右の前記把持部をそれぞれ作業者の左手および右手で把持した時に、前記作業者の左手および右手の親指が届く範囲にマニピュレータの速度調整手段を配置したことを特徴とするものである。
請求項6に記載の発明は、請求項1乃至5いずれかに記載の産業用ロボットの手持操作器と、前記手持操作器が接続される制御盤と、前記制御盤に接続される産業用ロボットと、を備えたことを特徴とするものである。
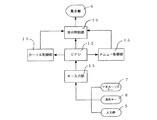
2:制御盤
2a:入力部
2b:表示部
3:手持操作器
3a:入力部
3b:表示部
4:表示部
5:入力部
6:把持部
7:十字カーソルキー
7a:上部
7b:右部
7c:下部
7d:左部
8:選択キー
9:操作メニューの項目
10:操作メニューの小項目
11:速度調整ダイヤル
12:中央演算部
13:キー入力部
14:カーソル制御部
15:メニュー制御部
16:表示制御部
Claims (6)
- 操作メニューを表示する表示画面が少なくとも設けられた上部と、
左右の側部に把持部が設けられた下部と、を備え、
前記上部と前記下部とが、前記上部の下側部および前記下部の上側部に設けられた滑らかなくびれ部によって接続され、前記下部の幅が前記上部の幅よりも狭い産業用ロボットの手持操作器であって、
作業者が、手の第2指から第5指を前記把持部の裏面に添え、掌を前記把持部の表面に当てがって把持した時に、
前記表示画面に表示されたカーソルを移動させる4個のキーは、前記くびれ部近傍かつ前記作業者の左手親指が届く範囲に配置され、
前記カーソルで指定された前記操作メニュー項目の実行を入力する選択キーは、前記くびれ部近傍かつ前記作業者の右手親指が届く範囲に配置される産業用ロボットの手持操作器において、
入出力を制御する中央演算部と、
前記カーソルの移動を行うカーソル制御部と、
前記操作メニュー表示の為のフォントデータを持ち、前記中央演算部の指令により前記操作メニューの制御を行うメニュー制御部と、
前記中央演算部、前カーソル制御部、および前メニュー制御部の指令により、画像を前記表示画面に出力する表示制御部と、を備えたことを特徴とする産業用ロボットの手持操作器。 - 操作メニューを表示する表示画面と、前記表示画面に表示されるカーソルを移動させる4個のキーと前記カーソルで指定された前記操作メニュー項目の実行を入力する選択キーとを含む操作入力手段と、左右の側部に配置された把持部と、を備えた産業用ロボットの手持操作器において、
前記4個のキーは、左右の前記把持部をそれぞれ作業者の左手および右手で把持した時に、前記作業者の左手親指が届く範囲に配置され、マニピュレータの軸動作を入力する機能を持つことを特徴とする産業用ロボットの手持操作器。 - 前記4個のキーは、十字カーソルキーであることを特徴とする請求項1に記載の産業用ロボットの手持操作器。
- 前記4個のキーは、略十字型にスイッチが配置されたカーソルキーであることを特徴とする請求項1に記載の産業用ロボットの手持操作器。
- 左右の前記把持部をそれぞれ作業者の左手および右手で把持した時に、
前記作業者の左手および右手の親指が届く範囲にマニピュレータの速度調整手段を配置したことを特徴とする請求項1に記載の産業用ロボットの手持操作器。 - 請求項1乃至5いずれかに記載の産業用ロボットの手持操作器と、
前記手持操作器が接続される制御盤と、
前記制御盤に接続される産業用ロボットと、を備えたことを特徴とするロボット制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008269987A JP5062535B2 (ja) | 2008-10-20 | 2008-10-20 | 産業用ロボットの手持操作器およびロボット制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008269987A JP5062535B2 (ja) | 2008-10-20 | 2008-10-20 | 産業用ロボットの手持操作器およびロボット制御システム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005241167A Division JP2005342891A (ja) | 2005-08-23 | 2005-08-23 | 産業用ロボットの手持操作器およびロボット制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009023087A true JP2009023087A (ja) | 2009-02-05 |
| JP5062535B2 JP5062535B2 (ja) | 2012-10-31 |
Family
ID=40395404
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008269987A Expired - Lifetime JP5062535B2 (ja) | 2008-10-20 | 2008-10-20 | 産業用ロボットの手持操作器およびロボット制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5062535B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102029612A (zh) * | 2011-01-25 | 2011-04-27 | 南京工业大学 | 机械手控制器 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06278069A (ja) * | 1993-03-30 | 1994-10-04 | Daikin Ind Ltd | ロボット操作盤 |
| JPH0976185A (ja) * | 1995-07-12 | 1997-03-25 | Fanuc Ltd | ロボットの移動制御方式 |
| JPH09193065A (ja) * | 1996-01-10 | 1997-07-29 | Yaskawa Electric Corp | ロボットのティーチボックス |
| JPH09269807A (ja) * | 1996-03-29 | 1997-10-14 | Minolta Co Ltd | 移動体制御装置 |
-
2008
- 2008-10-20 JP JP2008269987A patent/JP5062535B2/ja not_active Expired - Lifetime
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06278069A (ja) * | 1993-03-30 | 1994-10-04 | Daikin Ind Ltd | ロボット操作盤 |
| JPH0976185A (ja) * | 1995-07-12 | 1997-03-25 | Fanuc Ltd | ロボットの移動制御方式 |
| JPH09193065A (ja) * | 1996-01-10 | 1997-07-29 | Yaskawa Electric Corp | ロボットのティーチボックス |
| JPH09269807A (ja) * | 1996-03-29 | 1997-10-14 | Minolta Co Ltd | 移動体制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102029612A (zh) * | 2011-01-25 | 2011-04-27 | 南京工业大学 | 机械手控制器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5062535B2 (ja) | 2012-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6690265B2 (ja) | ロボット操作装置、ロボット操作方法 | |
| JP6642054B2 (ja) | ロボット操作装置、及びロボット操作プログラム | |
| JP6476662B2 (ja) | ロボット操作装置、ロボットシステム、及びロボット操作プログラム | |
| JP6497021B2 (ja) | ロボット操作装置、ロボットシステム、及びロボット操作プログラム | |
| EP2923806A1 (en) | Robot control device, robot, robotic system, teaching method, and program | |
| CN114905487B (zh) | 示教装置、示教方法以及记录介质 | |
| JPH11262883A (ja) | ロボットのマニュアル操作装置 | |
| JP2018176288A (ja) | ロボットの教示装置 | |
| US9782895B2 (en) | Apparatus for operating robots | |
| JP2018529543A (ja) | ロボット・システム | |
| JP4347313B2 (ja) | ロボット教示操作盤 | |
| WO2012062374A1 (en) | A control system and an operating device for controlling an industrial robot comprising a touch -screen | |
| JPH09103978A (ja) | ロボットの制御装置 | |
| JPH11262884A (ja) | ロボットのマニュアル操作装置 | |
| JP2016175132A (ja) | ロボット操作装置、ロボット操作方法 | |
| JP6710919B2 (ja) | ロボット操作装置 | |
| JP6379902B2 (ja) | ロボット操作装置、ロボットシステム、及びロボット操作プログラム | |
| JP2013154410A (ja) | 教示装置 | |
| JP5062535B2 (ja) | 産業用ロボットの手持操作器およびロボット制御システム | |
| JP3960569B2 (ja) | 産業用ロボットの手持操作器およびロボット制御システム | |
| JP2005342891A (ja) | 産業用ロボットの手持操作器およびロボット制御システム | |
| JP5316382B2 (ja) | ペンダント | |
| JP6379921B2 (ja) | ロボット操作装置、ロボットシステム、及びロボット操作プログラム | |
| JP2008257551A (ja) | 情報処理装置、文字入力方法、および、文字入力プログラム | |
| JP7436796B2 (ja) | ロボットのプログラム作成支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110531 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120111 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120305 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120713 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120726 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150817 Year of fee payment: 3 |
|
| EXPY | Cancellation because of completion of term |