JP2009053077A - 荷重測定装置及びその誤差補正方法 - Google Patents
荷重測定装置及びその誤差補正方法 Download PDFInfo
- Publication number
- JP2009053077A JP2009053077A JP2007220845A JP2007220845A JP2009053077A JP 2009053077 A JP2009053077 A JP 2009053077A JP 2007220845 A JP2007220845 A JP 2007220845A JP 2007220845 A JP2007220845 A JP 2007220845A JP 2009053077 A JP2009053077 A JP 2009053077A
- Authority
- JP
- Japan
- Prior art keywords
- load
- value
- correction
- correction function
- adjustment coefficient
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012937 correction Methods 0.000 title claims abstract description 86
- 238000005259 measurement Methods 0.000 title claims abstract description 27
- 238000000034 method Methods 0.000 title claims description 13
- 238000001514 detection method Methods 0.000 claims abstract description 6
- 238000004364 calculation method Methods 0.000 claims description 8
- 238000012887 quadratic function Methods 0.000 claims 2
- 230000006870 function Effects 0.000 description 33
- 230000003247 decreasing effect Effects 0.000 description 4
- 238000005303 weighing Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images








Landscapes
- Measurement Of Force In General (AREA)
Abstract
【解決手段】負荷された荷重を電気信号として検出し出力する荷重検出部1と、前記電気信号の値を補正する補正関数及び前記補正関数による補正量の調整を行う調整係数を格納する記憶部4と、前記電気信号の値を前記補正関数に代入して求めた値に前記調整係数を乗じて補正値を求め、前記電気信号の値と前記補正値との加算値又は減算値に基づいて前記負荷された荷重の荷重値を算出する演算部3と、を備える。
【選択図】図1
Description
(ステップS301)無負荷(下限荷重)で測定を行い、測定値(電圧値)x1をメモリ4に格納する。
(ステップS302)所定の負荷での測定を行い、測定値x2をメモリ4に格納する。所定の負荷は例えば無負荷と定格荷重の中間値である。荷重の負荷には分銅等を用いる。
(ステップS303)定格荷重(上限荷重)での測定を行い、測定値x3をメモリ4に格納する。
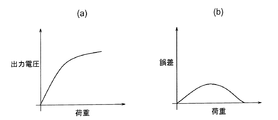
(ステップS304)各荷重における理論値と測定値x1、x2、x3との差分(誤差)y1、y2、y3を求め、近似する2次式の補正関数y=ax2+bx+cを求める。ここで理論値は無負荷時の測定値と定格荷重を負荷した時の測定値とを結ぶ基準直線上の値である。従って、無負荷時と定格荷重を負荷した時の誤差y1、y3は0になる。
(ステップS305)算出された補正関数の係数a、b、cをメモリ4に格納する。
以上が補正関数設定モード時の動作である。
2 A/Dコンバータ
3 マイクロプロセッサ
4 メモリ
Claims (6)
- 負荷された荷重を電気信号として検出し出力する荷重検出部と、
前記電気信号の値を補正する補正関数及び前記補正関数による補正量の調整を行う調整係数を格納する記憶部と、
前記電気信号の値を前記補正関数に代入して求めた値に前記調整係数を乗じて補正値を求め、前記電気信号の値と前記補正値との加算値又は減算値に基づいて前記負荷された荷重の荷重値を算出する演算部と、
を備える荷重測定装置。 - 前記演算部は、補正関数設定モード時に前記補正関数の係数を算出して前記記憶部に格納し、調整係数設定モード時に前記調整係数を前記記憶部に格納し、測定モード時に前記補正関数及び前記調整係数を用いて前記負荷された荷重の荷重値を算出することを特徴とする請求項1に記載の荷重測定装置。
- 前記補正関数は2次関数であることを特徴とする請求項1又は2に記載の荷重測定装置。
- 前記2次関数の係数は、前記荷重検出部に下限荷重、上限荷重、及び前記下限荷重より大きく前記上限荷重より小さい荷重を負荷した時に出力される前記電気信号の値に基づいて決定されることを特徴とする請求項3に記載の荷重測定装置。
- 荷重検出部、調整係数及び補正関数を格納した記憶部、及び演算部を有する荷重測定装置の誤差補正方法であって、
前記荷重検出部が負荷された荷重を電気信号として検出して出力し、
前記演算部が前記電気信号の値を前記補正関数に代入して求めた値に前記調整係数を乗じて補正値を求め、前記電気信号の値と前記補正値との加算値又は減算値に基づいて前記負荷された荷重の荷重値を算出して誤差を補正する荷重測定装置の誤差補正方法。 - 補正関数の係数を算出して記憶部に格納し、
調整係数を設定して前記記憶部に格納し、
負荷された荷重を電気信号として検出し、
前記電気信号の値を前記補正関数に代入して求めた値に前記調整係数を乗じて補正値を求め、前記電気信号の値と前記補正値との加算値又は減算値に基づいて前記負荷された荷重の荷重値を算出して誤差を補正する荷重測定装置の誤差補正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007220845A JP2009053077A (ja) | 2007-08-28 | 2007-08-28 | 荷重測定装置及びその誤差補正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007220845A JP2009053077A (ja) | 2007-08-28 | 2007-08-28 | 荷重測定装置及びその誤差補正方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009053077A true JP2009053077A (ja) | 2009-03-12 |
Family
ID=40504275
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007220845A Pending JP2009053077A (ja) | 2007-08-28 | 2007-08-28 | 荷重測定装置及びその誤差補正方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009053077A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101867735B1 (ko) * | 2016-12-23 | 2018-06-14 | 주식회사 포스코 | 중량 측정 장치 및 방법 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6064224A (ja) * | 1983-09-19 | 1985-04-12 | Kawasaki Steel Corp | 重力補正機能付電子式秤量機 |
| JPS63111426A (ja) * | 1986-10-30 | 1988-05-16 | Tokyo Electric Co Ltd | 電子秤 |
| JPH03233327A (ja) * | 1989-12-01 | 1991-10-17 | Ishida Scales Mfg Co Ltd | ロードセル型重量測定装置 |
| JPH09243441A (ja) * | 1996-03-08 | 1997-09-19 | Yamato Scale Co Ltd | 秤 |
| JPH1183606A (ja) * | 1997-09-03 | 1999-03-26 | Mitsubishi Electric Corp | 積載荷重計測装置 |
| JP2002250654A (ja) * | 2001-02-26 | 2002-09-06 | Kubota Corp | はかり、はかりの重力加速度補正方法、はかりの重力加速度補正用プログラム |
| JP2006090707A (ja) * | 2004-09-21 | 2006-04-06 | Shimadzu Corp | 電子天びん |
-
2007
- 2007-08-28 JP JP2007220845A patent/JP2009053077A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6064224A (ja) * | 1983-09-19 | 1985-04-12 | Kawasaki Steel Corp | 重力補正機能付電子式秤量機 |
| JPS63111426A (ja) * | 1986-10-30 | 1988-05-16 | Tokyo Electric Co Ltd | 電子秤 |
| JPH03233327A (ja) * | 1989-12-01 | 1991-10-17 | Ishida Scales Mfg Co Ltd | ロードセル型重量測定装置 |
| JPH09243441A (ja) * | 1996-03-08 | 1997-09-19 | Yamato Scale Co Ltd | 秤 |
| JPH1183606A (ja) * | 1997-09-03 | 1999-03-26 | Mitsubishi Electric Corp | 積載荷重計測装置 |
| JP2002250654A (ja) * | 2001-02-26 | 2002-09-06 | Kubota Corp | はかり、はかりの重力加速度補正方法、はかりの重力加速度補正用プログラム |
| JP2006090707A (ja) * | 2004-09-21 | 2006-04-06 | Shimadzu Corp | 電子天びん |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101867735B1 (ko) * | 2016-12-23 | 2018-06-14 | 주식회사 포스코 | 중량 측정 장치 및 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20140358317A1 (en) | Output value correction method for physical quantity sensor apparatus, output correction method for physical quantity sensor, physical quantity sensor apparatus and output value correction apparatus for physical quantity sensor | |
| JP5679704B2 (ja) | ストレインゲージ式ロードセルの故障診断装置 | |
| US20090057038A1 (en) | Load cell-type electronic balance | |
| JP2008057988A (ja) | デジタル重量計 | |
| US8355889B2 (en) | Electronic balance | |
| JP4752528B2 (ja) | 歪みゲージ式ロードセルおよびそれを用いた電子はかり | |
| JP6537289B2 (ja) | 計量装置 | |
| JP6093622B2 (ja) | ヒステリシス誤差補償装置、荷重センサ、計量装置およびヒステリシス誤差補償方法 | |
| JP2009053077A (ja) | 荷重測定装置及びその誤差補正方法 | |
| JP5669551B2 (ja) | ロードセルの故障診断装置 | |
| JP4776821B2 (ja) | 重量測定システム | |
| JP5823279B2 (ja) | クリープ補償装置及び計量装置のクリープ割合変更方法 | |
| JP2003035592A (ja) | 計量装置 | |
| JP6320214B2 (ja) | 重量指示計 | |
| JP5098995B2 (ja) | センサ特性補正装置および材料試験機 | |
| JP2010107266A (ja) | ロードセル | |
| JP4347548B2 (ja) | ヒステリシス誤差補正装置 | |
| JP2008202939A (ja) | 電子天びん | |
| JP3187757U (ja) | 電子天秤 | |
| JP5033157B2 (ja) | デジタル指示計の校正方法およびデジタル指示計 | |
| EP3070452B1 (en) | Correction device, correction method, program, and electrostatic capacitance type pressure sensor | |
| JPH1137827A (ja) | 荷重測定装置 | |
| JP7704653B2 (ja) | ガス検知器の点検方法およびガス検知器の点検装置 | |
| JP4771391B2 (ja) | 計重装置のヒステリシス補正方法 | |
| KR20130053079A (ko) | 화물의 부피 또는 질량을 근사치로 계측하는 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100721 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121016 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130702 |