JP2009083583A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2009083583A JP2009083583A JP2007253666A JP2007253666A JP2009083583A JP 2009083583 A JP2009083583 A JP 2009083583A JP 2007253666 A JP2007253666 A JP 2007253666A JP 2007253666 A JP2007253666 A JP 2007253666A JP 2009083583 A JP2009083583 A JP 2009083583A
- Authority
- JP
- Japan
- Prior art keywords
- temperature
- vehicle control
- engagement element
- friction engagement
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/547—Transmission for changing ratio the transmission being a stepped gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
- B60W10/115—Stepped gearings with planetary gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0437—Smoothing ratio shift by using electrical signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K1/02—Arrangement or mounting of electrical propulsion units comprising more than one electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/425—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/445—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/50—Drive Train control parameters related to clutches
- B60L2240/507—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/02—Clutches
- B60W2510/0291—Clutch temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0676—Engine temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/087—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/027—Clutch torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H2037/0866—Power-split transmissions with distributing differentials, with the output of the CVT connected or connectable to the output shaft
- F16H2037/0873—Power-split transmissions with distributing differentials, with the output of the CVT connected or connectable to the output shaft with switching means, e.g. to change ranges
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Transmission Device (AREA)
Abstract
【課題】電動機等の駆動源自体の温度やその環境温度の変化に起因する車両制御への悪影響を解消することが可能な車両の制御装置を提供する。
【解決手段】モータジェネレータMG2の出力を自動変速機3によって変速して駆動輪7へ伝達するハイブリッド車HVにおいて、モータジェネレータMG2の磁石温度を推定し、その磁石温度が基準温度よりも高い場合には、自動変速機3のブレーキB1,B2を係合及び解放するための油圧指令値を低くするように補正することでタイアップショックを防止する。一方、磁石温度が基準温度よりも低い場合には、自動変速機3のブレーキB1,B2を係合及び解放するための油圧指令値を高くするように補正し、モータジェネレータMG2の吹け上がりを回避する。
【選択図】図1
【解決手段】モータジェネレータMG2の出力を自動変速機3によって変速して駆動輪7へ伝達するハイブリッド車HVにおいて、モータジェネレータMG2の磁石温度を推定し、その磁石温度が基準温度よりも高い場合には、自動変速機3のブレーキB1,B2を係合及び解放するための油圧指令値を低くするように補正することでタイアップショックを防止する。一方、磁石温度が基準温度よりも低い場合には、自動変速機3のブレーキB1,B2を係合及び解放するための油圧指令値を高くするように補正し、モータジェネレータMG2の吹け上がりを回避する。
【選択図】図1
Description
本発明は、例えば複数の駆動源を有するハイブリッド車などに代表される車両の制御装置に係る。特に、本発明は、温度変化に起因する車両制御への悪影響を解消するための対策に関する。
近年、環境保護の観点から、車両に搭載されたエンジン(内燃機関)からの排気ガスの排出量低減及び燃費の改善が望まれており、これを満足する車両として、ハイブリッドシステムを搭載したハイブリッド車が実用化されている。
このハイブリッド車は、ガソリンエンジンやディーゼルエンジンなどのエンジンと、エンジン出力による発電またはバッテリに蓄えられた電力により駆動(力行)してエンジン出力のアシスト等を行う電動機(例えばモータジェネレータまたはモータ)とを備え、これらエンジン及び電動機のいずれか一方または双方を走行駆動源としている。
この種のハイブリッド車においては、車速及びアクセル開度に基づいて、エンジン及び電動機の運転領域(具体的には駆動または停止)が制御される。例えば、発進時や低速走行時のようにエンジン効率が低くなる領域では、エンジンを停止させて電動機のみの動力で駆動輪を駆動する。また、通常走行時には、エンジンを駆動して、そのエンジンの動力で駆動輪を駆動するという制御を行う。さらに、全開加速等の高負荷時には、エンジンの動力に加えて、バッテリから電動機に電力を供給して電動機による動力を補助動力として追加するという制御を行う。
上述したハイブリッド車などの車両において、電動機が発生するトルク及び回転速度を車両の走行状態に応じて適切に駆動輪に伝達するために、電動機と駆動輪との間の変速比を自動的に最適設定する自動変速機を搭載したものが知られている(例えば下記の特許文献1及び特許文献2)。この自動変速機としては、摩擦係合要素であるクラッチやブレーキと遊星歯車装置とを用いてギヤ段(変速段)を設定する遊星歯車式変速機が適用されている。例えば、摩擦係合要素として2個のブレーキを備えさせ、一方のブレーキを係合し他方のブレーキを解放する変速段(例えば低速段)と、他方のブレーキを係合し一方のブレーキを解放する変速段(例えば高速段)との切り換えを行うようにしている。この場合、各ブレーキの掴み換えを行う所謂クラッチツークラッチ変速が行われることになる。
一般に、ハイブリッド車では、上記電動機への供給電流を調整することで電動機の出力(トルク)を制御するようになっている。このため、上記電動機の作動により駆動力をアシストしている状況などにあっては、上記変速機の変速動作が行われる際に変速ショックを生じさせることなく変速動作が円滑に行われるよう電動機の出力を制御することが望まれている。
特開2006−188213号公報
特開2005−264762号公報
ところで、上述したハイブリッド車の如く、電動機と駆動輪との間に自動変速機を搭載したものにあっては、以下に述べるような課題があった。
つまり、一般に電動機としては交流同期電動機(永久磁石同期電動機)等が採用されており、この電動機のロータ磁石温度は、電動機の使用状況等に応じて刻々と変動するものである。そして、このロータ磁石温度が変動する状況にあっては、そのロータ磁石温度に応じて電動機の能力が変化することになる。
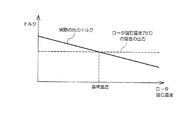
具体的には、ロータ磁石温度が基準温度(例えば75℃)よりも高くなると、磁力の低下が原因となって、電動機に対する指令値によって本来得られるべき出力トルク(上記基準温度にある場合にその指令値によって得られる出力トルク)よりも実際の出力トルクが小さくなる傾向がある。逆に、ロータ磁石温度が基準温度よりも低くなると、磁力が高くなるため、電動機に対する指令値によって本来得られるべき出力トルク(上記基準温度にある場合にその指令値によって得られる出力トルク)よりも実際の出力トルクが大きくなる傾向がある。
このような状況で、上記自動変速機の変速動作が行われた場合、適正な出力トルクから乖離した出力トルクを電動機から受けた状態で自動変速機の変速動作がなされることになるため、以下の不具合を招くことが懸念される。
(ロータ磁石温度が基準温度よりも高い場合)
ロータ磁石温度が基準温度よりも高い場合には、実際の電動機の出力トルクが小さくなるため、このような状況で自動変速機の変速動作が行われると、自動変速機に備えられている摩擦係合要素であるブレーキ(またはクラッチ)のトルク容量が電動機の出力トルクに対して相対的に過剰となる。つまり、電動機の出力トルクに対してブレーキの係合力が高くなり過ぎてしまう。その結果、変速動作の開始前に係合状態にあったブレーキと変速動作の終了後に係合状態となるべきブレーキとの両係合力が、変速途中において、電動機の出力トルクに対して最適な係合力よりも高くなる状態となって、自動変速機の内部で一時的にインターロック状態となる所謂タイアップ状態を招くことになる。このようなタイアップが発生する状況では、変速時に、車両に変速ショック(タイアップショック)が発生し、乗員に違和感を与えてしまうことになる。
ロータ磁石温度が基準温度よりも高い場合には、実際の電動機の出力トルクが小さくなるため、このような状況で自動変速機の変速動作が行われると、自動変速機に備えられている摩擦係合要素であるブレーキ(またはクラッチ)のトルク容量が電動機の出力トルクに対して相対的に過剰となる。つまり、電動機の出力トルクに対してブレーキの係合力が高くなり過ぎてしまう。その結果、変速動作の開始前に係合状態にあったブレーキと変速動作の終了後に係合状態となるべきブレーキとの両係合力が、変速途中において、電動機の出力トルクに対して最適な係合力よりも高くなる状態となって、自動変速機の内部で一時的にインターロック状態となる所謂タイアップ状態を招くことになる。このようなタイアップが発生する状況では、変速時に、車両に変速ショック(タイアップショック)が発生し、乗員に違和感を与えてしまうことになる。
図14は、このようにロータ磁石温度が基準温度よりも高い場合における、モータ回転数、自動変速機の出力軸トルク、自動変速機のブレーキ油圧指令値(実線は係合側のブレーキに対する油圧指令値、破線は解放側のブレーキに対する油圧指令値)である。この図14に示すように、変速タイミングにおいて自動変速機の出力軸トルクが急激に大きく落ち込むタイアップショックが発生している。
(ロータ磁石温度が基準温度よりも低い場合)
ロータ磁石温度が基準温度よりも低い場合には、実際の電動機の出力トルクが大きくなるため、このような状況で自動変速機の変速動作が行われると、自動変速機に備えられている摩擦係合要素であるブレーキ(またはクラッチ)のトルク容量が電動機の出力トルクに対して相対的に不足することになる。つまり、電動機の出力トルクに対してブレーキの係合力が低くなり過ぎてしまう。その結果、電動機に対する所謂負荷抜け状態となり、変速途中において、電動機の回転数が急上昇する(吹け上がる)といった状況を招く可能性がある。このような電動機の吹け上がりが発生する状況では、電動機の駆動部分や摺動部分に大きな負荷が掛かり、電動機の寿命を短縮化することに繋がってしまう。
ロータ磁石温度が基準温度よりも低い場合には、実際の電動機の出力トルクが大きくなるため、このような状況で自動変速機の変速動作が行われると、自動変速機に備えられている摩擦係合要素であるブレーキ(またはクラッチ)のトルク容量が電動機の出力トルクに対して相対的に不足することになる。つまり、電動機の出力トルクに対してブレーキの係合力が低くなり過ぎてしまう。その結果、電動機に対する所謂負荷抜け状態となり、変速途中において、電動機の回転数が急上昇する(吹け上がる)といった状況を招く可能性がある。このような電動機の吹け上がりが発生する状況では、電動機の駆動部分や摺動部分に大きな負荷が掛かり、電動機の寿命を短縮化することに繋がってしまう。
図15は、このようにロータ磁石温度が基準温度よりも低い場合における、モータ回転数、変速機の出力軸トルク、自動変速機のブレーキ油圧指令値(実線は係合側のブレーキに対する油圧指令値、破線は解放側のブレーキに対する油圧指令値)である。この図15に示すように、変速タイミングにおいて電動機の回転数の急上昇が発生している。
尚、温度変化に起因する出力トルクの変動は、上述した交流同期電動機の場合に限らず、誘導型の電動機においても同様に発生する。つまり、この種の電動機では、温度上昇に伴って導線の電気抵抗値が高くなり、能力が低下する。即ち、上記の場合と同様に、電動機の温度が基準温度よりも高くなると、電動機に対する指令値によって本来得られるべき出力トルクよりも実際の出力トルクが小さくなる。逆に、電動機の温度が基準温度よりも低くなると、電動機に対する指令値によって本来得られるべき出力トルクよりも実際の出力トルクが大きくなる。
更に、電動機に限らず、内燃機関においても温度変化に起因して出力トルクが変動する。つまり、同一吸気量及び同一燃料噴射量であっても内燃機関の温度が異なれば出力トルクも異なる。具体的には、内燃機関の温度が低い状態(例えば冷間始動直後)では、潤滑油の粘性が高く、これが攪拌抵抗になるなどして出力トルクが低くなる。これに対し、内燃機関の暖機完了後、つまり、内燃機関の温度が比較的高い状態では、上記攪拌抵抗の低減により出力トルクが高くなる。
このように車両にあっては、駆動源からの出力トルクが温度(上記ロータ磁石温度や内燃機関自体の温度など)によって変動するため、それが原因となって適正な制御が行えない(例えば変速機の変速動作が適正に行えない)といった状況を招く可能性があった。
本発明は、以上の点に鑑みてなされたものであり、その目的とするところは、電動機等の駆動源自体の温度やその環境温度の変化に起因する車両制御への悪影響を解消することが可能な車両の制御装置を提供することにある。
−課題の解決原理−
上記の目的を達成するために講じられた本発明の解決原理は、電動機等の駆動源自体の温度やその環境温度の変化に起因する出力トルクの変動量を認識し、その変動量に応じて変速機における摩擦係合要素のトルク容量を補正するなどして、上記出力トルクの変動に起因する不具合を招かないような制御動作を行うようにしている。
上記の目的を達成するために講じられた本発明の解決原理は、電動機等の駆動源自体の温度やその環境温度の変化に起因する出力トルクの変動量を認識し、その変動量に応じて変速機における摩擦係合要素のトルク容量を補正するなどして、上記出力トルクの変動に起因する不具合を招かないような制御動作を行うようにしている。
−解決手段−
具体的に、本発明は、走行用の駆動力を出力する電動機と、この電動機から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置を前提とする。この車両の制御装置に対し、上記電動機の温度を推定または検出する温度認識手段と、この温度認識手段によって推定または検出された電動機の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えさせている。
具体的に、本発明は、走行用の駆動力を出力する電動機と、この電動機から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置を前提とする。この車両の制御装置に対し、上記電動機の温度を推定または検出する温度認識手段と、この温度認識手段によって推定または検出された電動機の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えさせている。
この特定事項により、電動機がそれ自体の温度変化の影響を受けて能力が変化する状況となっても、それに応じた変速機の変速動作を実現することが可能となる。具体的に、永久磁石同期電動機の場合、温度によって磁石の磁力が変動し、その影響を受けて、磁石温度が高い場合には出力トルクが低下し、逆に、磁石温度が低い場合には出力トルクが上昇する傾向にある。同様に、誘導型電動機の場合、温度によって導線の電気抵抗が変動し、その影響を受けて、温度が高い場合には出力トルクが低下し、逆に、温度が低い場合には出力トルクが上昇する傾向にある。そして、出力トルクが低下した状態で変速機の変速動作が行われると、変速機に備えられている摩擦係合要素のトルク容量が電動機の出力トルクに対して相対的に過剰となってタイアップショックを招く可能性があった。逆に、出力トルクが上昇した状態で変速機の変速動作が行われると、変速機に備えられている摩擦係合要素のトルク容量が電動機の出力トルクに対して相対的に不足し、電動機の回転数が急上昇する(吹け上がる)といった状況を招く可能性があった。
本発明によれば、このような温度変化の影響による電動機の出力トルクの変動に対応して変速機の変速動作を補正するようにしているため、上記タイアップショックや電動機回転数の吹け上がりを回避することができる。
また、上記電動機及び温度認識手段の具体構成としては以下のものが挙げられる。つまり、上記温度認識手段が、電動機に備えられた磁石の温度を推定または検出する構成としている。これにより、永久磁石同期電動機の磁石温度によって変動する出力トルクに応じた変速機の変速動作を実現することができる。
上記変速動作補正手段のより具体的な構成としては以下のものが挙げられる。つまり、上記変速動作補正手段が、摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を補正する構成としている。
この場合のトルク容量の補正手法としては、上記温度認識手段によって推定または検出された電動機の温度が所定の基準温度よりも高いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を小さくするように補正する。そして、上記摩擦係合要素が、油圧の供給により係合状態が変更されるものである場合には、上記変速動作補正手段が、摩擦係合要素へ供給する油圧値を低く補正することにより摩擦係合要素のトルク容量を小さくするようにしている。
逆に、上記温度認識手段によって推定または検出された電動機の温度が所定の基準温度よりも低いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を大きくするように補正する。そして、上記摩擦係合要素が、油圧の供給により係合状態が変更されるものである場合には、上記変速動作補正手段が、摩擦係合要素へ供給する油圧値を高く補正することにより摩擦係合要素のトルク容量を大きくするようにしている。尚、ここでいう所定の基準温度とは、電動機の定常駆動状態における温度であって、例えば75℃に設定される。この値はこれに限定されるものではない。
このようにして電動機の温度に応じて摩擦係合要素のトルク容量を補正するようにしたことにより、上記タイアップショックや電動機回転数の吹け上がりを回避するための具体的な制御手法を特定することができ、本発明の実用性の向上を図ることができる。
また、上記摩擦係合要素を電磁クラッチにより構成した場合には、上記変速動作補正手段が、電磁クラッチを作動させるための電圧値を補正することにより摩擦係合要素のトルク容量を補正することになる。
このように、油圧供給によって係合状態が変更される摩擦係合要素に限らず、電磁クラッチによって摩擦係合要素を構成した場合にも、上述した各解決手段の場合と同様の作用を得て、上記タイアップショックや電動機回転数の吹け上がりを回避することが可能となる。
また、上述した変速動作補正手段による摩擦係合要素のトルク容量補正動作に加えて、更なる補正(追加補正)を行うようにした構成として以下のものが挙げられる。つまり、上記摩擦係合要素の摩擦接触面の表面温度を推定または検出する摩擦接触面温度認識手段と、上記摩擦接触面温度認識手段によって推定または検出された摩擦接触面の表面温度が所定の基準温度よりも高いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量の指令値を大きくするように補正する変速動作追加補正手段とを備えさせた構成である。
また、上記摩擦係合要素の摩擦接触面の表面温度を推定または検出する摩擦接触面温度認識手段と、上記摩擦接触面温度認識手段によって推定または検出された摩擦接触面の表面温度が所定の基準温度よりも低いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量の指令値を小さくするように補正する変速動作追加補正手段とを備えさせた構成も挙げられる。
このように、電動機の温度に応じた摩擦係合要素のトルク容量の補正だけでなく、摩擦係合要素の摩擦接触面の表面温度に応じた摩擦係合要素のトルク容量の指令値の補正も行うようにすることで、より高精度で最適なトルク容量をもって変速機の変速動作を行わせることができる。尚、摩擦接触面の表面温度が所定の基準温度よりも高いほど摩擦係合要素のトルク容量の指令値を大きくするようにした理由は、摩擦接触面の表面温度が高くなると、表面温度が低い場合に比べて、相手側の摩擦接触面と接触する際における摩擦抵抗が低くなり、その結果、駆動源の出力トルクに対して相対的にトルク容量が不足した状況を引き起こしてしまう可能性があるためである。つまり、摩擦係合要素のトルク容量の指令値を大きくすることで、上記摩擦接触面の表面温度が高くなっていることによる悪影響を解消するようにしている。
また、上記の目的を達成するための他の解決手段としては以下のものも挙げられる。つまり、走行用の駆動力を出力する駆動源と、この駆動源から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置を前提とする。この車両の制御装置に対し、上記駆動源の温度を推定または検出する温度認識手段と、上記温度認識手段によって推定または検出された駆動源の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えさせている。
この場合に、上記駆動源は内燃機関であり、上記温度認識手段が、内燃機関の冷却水温度または潤滑油温度を検出する構成としている。
そして、温度認識手段によって推定または検出された内燃機関の温度が所定の暖機運転完了温度よりも低いほど、上記変速動作補正手段が、摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を小さくするように補正する構成としている。
また、温度認識手段によって推定または検出された内燃機関の温度が所定の暖機運転完了温度よりも高いほど、上記変速動作補正手段が、摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を大きくするように補正する構成としている。
内燃機関にあっては、例えば冷間始動直後などのように内燃機関の温度が比較的低い状態では、潤滑油の粘性が高く、これが攪拌抵抗になるなどして出力トルクが低くなる傾向がある。これに対し、内燃機関の暖機完了後、つまり、内燃機関の温度が比較的高い状態になると、上記攪拌抵抗の低減により出力トルクが高くなる傾向がある。この点を考慮し、本解決手段では、内燃機関の温度(例えば冷却水温度や潤滑油温度から認識される温度)と出力トルクとの相関に基づいて摩擦係合要素のトルク容量を補正している。従って、本解決手段によっても、摩擦係合要素のトルク容量がエンジン出力に対して相対的に過剰となってタイアップショックを招いたり、摩擦係合要素のトルク容量がエンジン出力に対して相対的に不足して内燃機関回転数が吹け上がるといった状況を回避することができる。
また、内燃機関自体の温度に応じて摩擦係合要素のトルク容量を補正するものに代えて、内燃機関に吸入される吸気温度に応じて摩擦係合要素のトルク容量を補正するようにしたものも本発明の技術的思想の範疇である。つまり、走行用の駆動力を出力する内燃機関と、この内燃機関から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置を前提とする。この車両の制御装置に対し、上記内燃機関に吸入される吸気の温度を検出する温度認識手段と、上記温度認識手段によって検出された吸気の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えさせている。
この場合に、温度認識手段によって検出された吸気の温度が所定温度よりも高いほど、上記変速動作補正手段が、摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を小さくするように補正する構成としている。
また、温度認識手段によって検出された吸気の温度が所定温度よりも低いほど、上記変速動作補正手段が、摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を大きくするように補正する構成としている。
内燃機関は、吸気の温度が低いほど気筒内への空気の充填効率が高まるため出力トルクとしては高くなる。逆に、吸気の温度が高いほど空気の充填効率が低くなって出力トルクとしては低くなる。この点を考慮し、本解決手段では、内燃機関に吸入される吸気の温度と出力トルクとの相関に基づいて摩擦係合要素のトルク容量を補正している。従って、本解決手段によっても、摩擦係合要素のトルク容量がエンジン出力に対して相対的に過剰となってタイアップショックを招いたり、摩擦係合要素のトルク容量がエンジン出力に対して相対的に不足して内燃機関回転数が吹け上がるといった状況を回避することができる。
尚、ここでいう吸気の所定温度とは、例えば20℃に設定される。このような設定により、例えば、吸気の充填効率が低くなる傾向にある夏期では摩擦係合要素のトルク容量が小さめに設定され、吸気の充填効率が高くなる傾向にある冬期では摩擦係合要素のトルク容量が大きめに設定されるといった状態を得ることができる。上記の値はこれに限定されるものではない。
また、電動機の温度に応じて、その電動機に対するトルク指令値を補正するようにしたものも本発明の技術的思想の範疇である。つまり、走行用の駆動力を出力する電動機と、この電動機にトルク指令値を出力することでこの電動機を駆動制御する電動機制御手段とを備えた車両の制御装置を前提とする。この車両の制御装置に対し、上記電動機の温度を推定または検出する温度認識手段と、上記温度認識手段によって推定または検出された電動機の温度に基づいて上記電動機制御手段から出力されるトルク指令値を補正するトルク指令値補正手段とを備えさせている。
この場合に、温度認識手段によって推定または検出された電動機の温度が所定温度よりも高いほど、上記トルク指令値補正手段が、トルク指令値を高くするように補正する構成としている。
また、温度認識手段によって推定または検出された電動機の温度が所定温度よりも低いほど、上記トルク指令値補正手段が、トルク指令値を低くするように補正する構成としている。
これらの特定事項によれば、電動機の温度に関わりなく、この電動機からは常に所望の出力トルクが得られることになり、車両の走行安定性及びドライバの要求に応じた走行性能を得ることが可能になる。
本発明では、電動機等の駆動源自体の温度やその環境温度の変化に起因する出力トルクの変動量を認識し、その変動量に応じて変速機における摩擦係合要素のトルク容量を補正するなどして、上記出力トルクの変動に起因する不具合を招かないような制御動作を行うようにしている。このため、温度の影響による電動機等の駆動源の出力トルク変動の悪影響を受けることなしに変速動作時のタイアップショックや電動機回転数の吹け上がりを回避することができる。
以下、本発明の実施の形態を図面に基づいて説明する。
(第1実施形態)
本実施形態は、2つのモータ・ジェネレータを備え、且つFR(フロントエンジン・リヤドライブ)車として構成されたハイブリッド車に対して本発明を適用した場合について説明する。
本実施形態は、2つのモータ・ジェネレータを備え、且つFR(フロントエンジン・リヤドライブ)車として構成されたハイブリッド車に対して本発明を適用した場合について説明する。
図1は本実施形態に係るハイブリッド車HVの一例を示す概略構成図である。
このハイブリッド車HVは、エンジン1、第1モータジェネレータMG1、第2モータジェネレータMG2、動力分配機構2、自動変速機3、インバータ4、HVバッテリ5、デファレンシャルギヤ6、駆動輪7、油圧制御回路300(図4参照)、及び、ECU(Electronic Control Unit)100などを備えている。
これらエンジン1、各モータジェネレータMG1,MG2、動力分配機構2、自動変速機3、及び、ECU100の各部について以下に説明する。
−エンジン−
エンジン(駆動源)1は、ガソリンエンジンやディーゼルエンジンなどの燃料を燃焼させて動力を出力する公知の動力装置(内燃機関)であって、スロットル開度(吸気量)、燃料噴射量、点火時期などの運転状態を制御できるように構成されている。また、エンジン1の出力軸であるクランクシャフト11の回転数(エンジン回転数)はエンジン回転数センサ201によって検出される。このエンジン1は上記ECU100によって駆動制御される。
エンジン(駆動源)1は、ガソリンエンジンやディーゼルエンジンなどの燃料を燃焼させて動力を出力する公知の動力装置(内燃機関)であって、スロットル開度(吸気量)、燃料噴射量、点火時期などの運転状態を制御できるように構成されている。また、エンジン1の出力軸であるクランクシャフト11の回転数(エンジン回転数)はエンジン回転数センサ201によって検出される。このエンジン1は上記ECU100によって駆動制御される。
−モータジェネレータ−
モータジェネレータMG1,MG2は交流同期電動機であって、電動機(駆動源)として機能するとともに発電機としても機能する。モータジェネレータMG1,MG2はインバータ4を介してHVバッテリ5に接続されている。インバータ4はECU100によって制御され、そのインバータ4の制御により、モータジェネレータMG1,MG2の回生または力行(アシスト)が設定される。その際の回生電力はHVバッテリ5にインバータ4を介して充電される。また、モータジェネレータMG1,MG2の駆動用電力はHVバッテリ5からインバータ4を介して供給される。尚、上記HVバッテリ5は、ニッケル水素、リチウムイオン等の二次電池や燃料電池などが適用される。また、HVバッテリ5に代わる蓄電装置として、電気二重層コンデンサ等の大容量キャパシタなどを用いることも可能である。
モータジェネレータMG1,MG2は交流同期電動機であって、電動機(駆動源)として機能するとともに発電機としても機能する。モータジェネレータMG1,MG2はインバータ4を介してHVバッテリ5に接続されている。インバータ4はECU100によって制御され、そのインバータ4の制御により、モータジェネレータMG1,MG2の回生または力行(アシスト)が設定される。その際の回生電力はHVバッテリ5にインバータ4を介して充電される。また、モータジェネレータMG1,MG2の駆動用電力はHVバッテリ5からインバータ4を介して供給される。尚、上記HVバッテリ5は、ニッケル水素、リチウムイオン等の二次電池や燃料電池などが適用される。また、HVバッテリ5に代わる蓄電装置として、電気二重層コンデンサ等の大容量キャパシタなどを用いることも可能である。
−動力分配機構−
動力分配機構2は、外歯歯車のサンギヤS21と、このサンギヤS21と同心円上に配置された内歯歯車のリングギヤR21と、上記サンギヤS21に噛み合うとともに、リングギヤR21に噛み合う複数のピニオンギヤP21と、この複数のピニオンギヤP21を自転かつ公転自在に保持するキャリアCA21とを備え、これらサンギヤS21、リングギヤR21及びキャリアCA21を回転要素として差動作用を行う遊星歯車機構で構成されている。
動力分配機構2は、外歯歯車のサンギヤS21と、このサンギヤS21と同心円上に配置された内歯歯車のリングギヤR21と、上記サンギヤS21に噛み合うとともに、リングギヤR21に噛み合う複数のピニオンギヤP21と、この複数のピニオンギヤP21を自転かつ公転自在に保持するキャリアCA21とを備え、これらサンギヤS21、リングギヤR21及びキャリアCA21を回転要素として差動作用を行う遊星歯車機構で構成されている。
この動力分配機構2のキャリアCA21にはエンジン1の出力軸であるクランクシャフト11が連結されている。また、動力分配機構2のサンギヤS21には第1モータジェネレータMG1の回転軸が連結されている。そして、動力分配機構2のリングギヤR21にはリングギヤ軸21が連結されている。このリングギヤ軸21はデファレンシャルギヤ6を介して駆動輪7に連結されている。また、リングギヤ軸21には第2モータジェネレータMG2の回転軸が自動変速機3を介して連結されている。
このような構造の動力分配機構2において、第1モータジェネレータMG1が発電機として機能するときには、キャリアCA21から入力されるエンジン1からの動力をサンギヤS21側とリングギヤR21側にそのギヤ比に応じて分配する。一方、第1モータジェネレータMG1が電動機として機能するときには、キャリアCA21から入力されるエンジン1からの動力とサンギヤS21から入力される第1モータジェネレータMG1からの動力とを統合してリングギヤR21に出力する。
−自動変速機−
自動変速機3は、図2に示すように、ダブルピニオン型の第1遊星歯車機構31、シングルピニオン型の第2遊星歯車機構32、及び、2つのブレーキ(摩擦係合要素)B1,B2などを備えた遊星歯車式の変速機であって、入力軸30が第2モータジェネレータMG2の回転軸に連結されている。また、自動変速機3の出力軸33はリングギヤ軸(出力軸)21(図1を参照)に連結されている。
自動変速機3は、図2に示すように、ダブルピニオン型の第1遊星歯車機構31、シングルピニオン型の第2遊星歯車機構32、及び、2つのブレーキ(摩擦係合要素)B1,B2などを備えた遊星歯車式の変速機であって、入力軸30が第2モータジェネレータMG2の回転軸に連結されている。また、自動変速機3の出力軸33はリングギヤ軸(出力軸)21(図1を参照)に連結されている。
第1遊星歯車機構31は、外歯歯車のサンギヤS31と、このサンギヤS31と同心円上に配置された内歯歯車のリングギヤR31と、サンギヤS31に噛み合う複数の第1ピニオンギヤP31aと、この第1ピニオンギヤP31aに噛み合うとともに、リングギヤR31に噛み合う複数の第2ピニオンギヤP31bと、これら複数の第1ピニオンギヤP31a及び複数の第2ピニオンギヤP31bを連結して自転かつ公転自在に保持するキャリアCA31とを備えている。第1遊星歯車機構31のキャリアCA31は第2遊星歯車機構32のキャリアCA32に一体的に連結されている。そして、第1遊星歯車機構31のサンギヤS31はブレーキB1を介して非回転部材であるハウジングHに選択的に連結されており、ブレーキB1の係合によってサンギヤS31の回転が阻止される。
第2遊星歯車機構32は、外歯歯車のサンギヤS32と、このサンギヤS32と同心円上に配置された内歯歯車のリングギヤR32と、サンギヤS32に噛み合うとともに、リングギヤR32に噛み合う複数のピニオンギヤP32と、複数のピニオンギヤP32を自転かつ公転自在に保持するキャリアCA32とを備えている。この第2遊星歯車機構32のサンギヤS32は上記入力軸30に連結されており、キャリアCA32は上記出力軸33に連結されている。さらに、第2遊星歯車機構32のリングギヤR32はブレーキB2を介してハウジングHに選択的に連結されており、ブレーキB2の係合によりリングギヤR32の回転が阻止される。
そして、以上の如く構成された自動変速機3の入力軸30の回転数(入力回転数Nm)は入力軸回転数センサ203によって検出される。また、自動変速機3の出力軸33の回転数は出力軸回転数センサ204によって検出される。これら入力軸回転数センサ203及び出力軸回転数センサ204の出力信号から得られる回転数の比(出力回転数/入力回転数)に基づいて、自動変速機3の現状ギヤ段を判定することができる。
自動変速機3は運転者がシフトレバー等のレンジ切換え手段を操作することにより、例えばPレンジ(パーキングレンジ)、Nレンジ(ニュートラルレンジ)、Dレンジ(前進走行レンジ)等に切り変えることができる。
以上の自動変速機3では、摩擦係合要素であるブレーキB1,B2を所定の状態に係合または解放することによってギヤ段(変速段)が設定される(変速機制御手段による変速動作)。自動変速機3のブレーキB1,B2の係合・解放状態を図3の作動表に示す。図3の作動表において「○」は「係合」を表し、「空欄」は「解放」を表している。また、「△」はブレーキB1,B2のうちの一方を「係合」し他方を「解放」することを表している。
この例の自動変速機3において、ブレーキB1,B2の双方を解放することにより、入力軸30(第2モータジェネレータMG2の回転軸)と出力軸33(リングギヤ軸21)とを切り離すことができる(ニュートラル状態)が、NレンジにおいてはブレーキB2またはB1を係合し、第2モータジェネレータMG2のトルクを発生させないことでニュートラル状態を達成する。
また、変速ギヤ段の1速(1st)は、ブレーキB2を係合し、ブレーキB1を解放することによって設定される。ブレーキB2が係合すると、第2遊星歯車機構32のリングギヤR32の回転が固定され、その回転が固定されたリングギヤR32と、第2モータジェネレータMG2によって回転するサンギヤS32とによって、キャリアCA32つまり出力軸33が低速回転する。
変速ギヤ段の2速(2nd)は、ブレーキB1を係合し、ブレーキB2を解放することによって設定される。ブレーキB1が係合すると、第1遊星歯車機構31のサンギヤS31の回転が固定され、その回転が固定されたサンギヤS31と、第2モータジェネレータMG2によって回転するサンギヤS32(リングギヤ31)の回転とによって、キャリアCA32(キャリアCA31)つまり出力軸33が高速回転する。
以上の自動変速機3において、1速(1st)から2速(2nd)へのアップ変速は、ブレーキB2を解放すると同時にブレーキB1を係合するクラッチツークラッチ変速制御によって達成される。また、2速(2nd)から1速(1st)へのダウン変速は、ブレーキB1を解放すると同時にブレーキB2を係合するクラッチツークラッチ変速制御によって達成される。これらブレーキB1,B2の係合時または解放時の油圧は油圧制御回路300(図4参照)によって制御される。
油圧制御回路300には、リニアソレノイドバルブ及びオンオフソレノイドバルブなどが設けられており、それらソレノイドバルブの励磁・非励磁を制御して油圧回路を切り替えることによって自動変速機3のブレーキB1,B2の係合・解放を制御することができる。油圧制御回路300のリニアソレノイドバルブ及びオンオフソレノイドバルブの励磁・非励磁は、ECU100からのソレノイド制御信号(指示油圧信号)によって制御される。
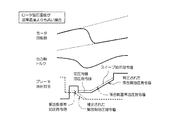
図4は、上記油圧制御回路300の概略構成を示している。この図4に示すように、油圧制御回路300は、エンジン1の回転により駆動され且つブレーキB1,B2を作動させるのに十分な圧送性能をもってオイル(オートマチックトランスミッションフルード:ATF)をオイル用流路301に圧送する機械式ポンプMPと、内蔵される図示しない電動モータにより駆動され且つブレーキB1,B2を作動させるのに必要最低限の圧送性能をもってオイルをオイル用流路301に圧送する電動ポンプEPと、機械式ポンプMPや電動ポンプEPからオイル用流路301に圧送されたオイルのライン油圧PLを調整する3ウェイソレノイドバルブ302およびプレッシャコントロールバルブ303と、ライン油圧PLを用いてブレーキB1,B2の係合力を調整するリニアソレノイドバルブ304,305やコントロールバルブ306,307、アキュムレータ308,309とから構成されている。この油圧制御回路300では、ライン油圧PLは、3ウェイソレノイドバルブ302を駆動してプレッシャコントロールバルブ303の開閉を制御することにより調整することができる。また、ブレーキB1,B2の係合力は、リニアソレノイドバルブ304,305に印加する電流を制御することによりライン油圧PLをブレーキB1,B2に伝達させるコントロールバルブ306,307の開閉を制御することにより調節することができる。また、この油圧制御回路300では、機械式ポンプMPまたは電動ポンプEPから圧送されたオイルのうちブレーキB1,B2の作動に用いられなかった余剰のオイルと、ブレーキB1,B2の作動に用いられた後のプレッシャコントロールバルブ303からの戻りのオイルとを潤滑油としてオイル用流路310を介して動力分配機構2に供給する。
−ECU−
ECU100は、図5に示すように、CPU101、ROM102、RAM103及びバックアップRAM104などを備えている。
ECU100は、図5に示すように、CPU101、ROM102、RAM103及びバックアップRAM104などを備えている。
ROM102には、ハイブリッド車HVの基本的な運転に関する制御の他、ハイブリッド車HVの走行状態に応じて自動変速機3のギヤ段を設定する変速制御を実行するためのプログラムを含む各種プログラムなどが記憶されている。この変速制御の具体的な内容については後述する。
CPU101は、ROM102に記憶された各種制御プログラムやマップに基づいて演算処理を実行する。また、RAM103はCPU101での演算結果や各センサから入力されたデータ等を一時的に記憶するメモリであり、バックアップRAM104はエンジン1の停止時にその保存すべきデータ等を記憶する不揮発性のメモリである。
これらCPU101、ROM102、RAM103及びバックアップRAM104はバス106を介して互いに接続されるとともに、インターフェース105と接続されている。
ECU100のインターフェース105には、上記エンジン回転数センサ201、エンジン1のスロットルバルブの開度を検出するスロットル開度センサ202、上記入力軸回転数センサ203、出力軸回転数センサ204、アクセルペダルの開度を検出するアクセル開度センサ205、シフトレバーの位置を検出するシフトポジションセンサ206、及び、ハイブリッド車HVの車速を検出する車速センサ207などが接続されており、これらの各センサからの信号がECU100に入力される。
ECU100は、上記した各種センサの出力信号に基づいて、エンジン1のスロットル開度(吸気量)制御、燃料噴射制御及び点火時期制御などを含むエンジン1の各種制御を実行する。
また、ECU100は、自動変速機3の油圧制御回路300にソレノイド制御信号(ブレーキ油圧指令信号)を出力する。このソレノイド制御信号に基づいて、油圧制御回路300のリニアソレノイドバルブ304,305やコントロールバルブ306,307などが制御され、所定のギヤ段(1速または2速)を構成するように、ブレーキB1,B2が所定の状態に係合または解放される。
さらに、ECU100は下記の「変速制御」及び「走行制御」を実行する。
−変速制御−
まず、ECU100は、アクセル開度センサ205の出力信号に基づいてアクセル開度Acを算出するとともに、車速センサ207に出力信号に基づいて車速Vを算出し、それらアクセル開度Ac及び車速Vに基づいて、図6に示すマップを参照して要求トルクTrを求める。
まず、ECU100は、アクセル開度センサ205の出力信号に基づいてアクセル開度Acを算出するとともに、車速センサ207に出力信号に基づいて車速Vを算出し、それらアクセル開度Ac及び車速Vに基づいて、図6に示すマップを参照して要求トルクTrを求める。
次に、車速V及び要求トルクTrに基づいて、図7に示す変速マップを参照して目標ギヤ段を算出するとともに、入力軸回転数センサ203及び出力軸回転数センサ204の出力信号から得られる回転数の比(出力回転数/入力回転数)に基づいて、自動変速機3の現状ギヤ段を判定し、それら目標ギヤ段と現状ギヤ段とを比較して変速操作が必要であるか否かを判定する。
その判定結果により、変速の必要がない場合(目標ギヤ段と現状ギヤ段とが同じで、ギヤ段が適切に設定されている場合)には、現状ギヤ段を維持するソレノイド制御信号(ブレーキ油圧指令信号)を自動変速機3の油圧制御回路300に出力する。
一方、目標ギヤ段と現状ギヤ段とが異なる場合には変速制御を行う。例えば、自動変速機3のギヤ段が「2速」の状態で走行している状況から、ハイブリッド車HVの走行状態が変化(例えば車速が変化)して、例えば図7に示す点Aから点Bに変化した場合、変速マップから算出される目標ギヤ段が「1速」となり、その1速のギヤ段を設定するソレノイド制御信号(ブレーキ油圧指令信号)を自動変速機3の油圧制御回路300に出力して、摩擦係合要素であるブレーキB1を解放すると同時にブレーキB2を係合することにより、2速のギヤ段から1速のギヤ段への変速(2nd→1stダウン変速)を行う。
なお、図6に示す要求トルク算出用のマップは、車速V及びアクセル開度Acをパラメータとして、要求トルクTrを実験・計算等により経験的に求めた値をマップ化したもので、ECU100のROM102に記憶されている。
また、図7に示す変速マップは、車速V及び要求トルクTrをパラメータとし、それら車速V及び要求トルクTrに応じて、適正なギヤ段を求めるための2つの領域(1st領域及び2nd領域)が設定されたマップであって、ECU100のROM102に記憶されている。変速マップの2つの領域は変速線(ギヤ段の切り換えライン)によって区画されている。
−走行制御−
ECU100は、上記と同様な処理により、アクセル開度Ac及び車速Vに基づいて図6に示すマップを参照してリングギヤ軸(出力軸)21に出力すべき要求トルクTrを算出し、この要求トルクTrに対応する要求動力がリングギヤ軸21に出力されるように、エンジン1及びモータジェネレータMG1,MG2(インバータ4)を駆動制御して所定の走行モードでハイブリッド車HVを走行させる。
ECU100は、上記と同様な処理により、アクセル開度Ac及び車速Vに基づいて図6に示すマップを参照してリングギヤ軸(出力軸)21に出力すべき要求トルクTrを算出し、この要求トルクTrに対応する要求動力がリングギヤ軸21に出力されるように、エンジン1及びモータジェネレータMG1,MG2(インバータ4)を駆動制御して所定の走行モードでハイブリッド車HVを走行させる。
例えば、発進時や低速走行時のようにエンジン効率が低くなる領域では、エンジン1の運転を停止し、要求動力に見合う動力を第2モータジェネレータMG2から自動変速機3を介してリングギヤ軸21に出力する。通常走行時には、要求動力に見合う動力がエンジン1から出力されるようにエンジン1を駆動するとともに、第1モータジェネレータMG1によって最適燃費となるようにエンジン1の回転数を制御する。
また、第2モータジェネレータMG2を駆動してトルクをアシストする場合、車速Vが遅い状態では自動変速機3のギヤ段を1stに設定してリングギヤ軸(出力軸)21に付加するトルクを大きくし、車速Vが増大した状態では自動変速機3のギヤ段を2ndに設定して第2モータジェネレータMG2の回転数を相対的に低下させて損失を低減することで、効率の良いトルクアシストを実行する。さらに、第2モータジェネレータMG2の運転を停止し、第1モータジェネレータMG1でエンジントルクの反力を受け持ちながら、エンジン1から動力分配機構2を介してリングギヤ軸21に直接伝達されるトルク(直達トルク)だけで走行するという走行制御も実行される。
−ブレーキ油圧制御−
次に、本実施形態の特徴とする動作であるブレーキ油圧制御について説明する。このブレーキ油圧制御は、上記ブレーキB1,B2の係合・解放を行わせるために油圧制御回路300によってブレーキB1,B2に付与される油圧を制御するものである。
次に、本実施形態の特徴とする動作であるブレーキ油圧制御について説明する。このブレーキ油圧制御は、上記ブレーキB1,B2の係合・解放を行わせるために油圧制御回路300によってブレーキB1,B2に付与される油圧を制御するものである。
そして、本実施形態では、このブレーキ油圧制御は、第2モータジェネレータMG2のロータ磁石温度に基づいて行われる。
上記第2モータジェネレータMG2に対する出力トルク指令値(以下、単に指令値と呼ぶ)であるパルス信号は、ロータ磁石温度が75℃となっていることを条件として設定されている。つまり、ロータ磁石温度が75℃である場合に、第2モータジェネレータMG2から所望の出力トルクを得るべく上記指令値を設定している。具体的には、上記インバータ4が、ECU100からのスイッチング制御信号に応答した電力用半導体スイッチング素子のオンオフ制御(スイッチング制御)を行うことにより、電源ラインから受ける直流電圧を三相交流電圧に変換し、その変換した三相交流電圧を第2モータジェネレータMG2へ出力することにより、第2モータジェネレータMG2が指令値に従った出力トルクを発生するように駆動制御している。そして、この第2モータジェネレータMG2に対する指令値は、ロータ磁石温度が75℃であると仮定した場合に、第2モータジェネレータMG2に要求される適切な出力トルクが得られるような値に設定されている。つまり、ロータ磁石温度が75℃(基準温度)に維持されておれば、指令値に応じて第2モータジェネレータMG2から適切な出力トルクが得られることになる。
しかしながら、第2モータジェネレータMG2のロータ磁石温度は、第2モータジェネレータMG2の使用状況等に応じて刻々と変動している。このようにロータ磁石温度が変動する状況にあっては、そのロータ磁石温度に応じて第2モータジェネレータMG2の能力が変化することになる。具体的には、ロータ磁石温度が基準温度よりも高くなると、第2モータジェネレータMG2に対する指令値によって本来得られるべき出力トルクよりも実際の出力トルクが小さくなる傾向がある。逆に、ロータ磁石温度が基準温度よりも低くなると、第2モータジェネレータMG2に対する指令値によって本来得られるべき出力トルクよりも実際の出力トルクが大きくなる傾向がある。図8は、上記指令値に対して実際の出力トルクの乖離幅とロータ磁石温度との関係を示している。このように、基準温度(本実施形態の場合には75℃)に対してロータ磁石温度が高くなっていくほど、実際の出力トルクは小さくなっていく。逆に、基準温度(75℃)に対してロータ磁石温度が低くなっていくほど、実際の出力トルクは大きくなっていく。
このような状況を踏まえ、本実施形態では、第2モータジェネレータMG2のロータ磁石温度に応じて油圧制御回路300からブレーキB1,B2に付与される油圧を制御するようにしている。具体的には、基準温度に対してロータ磁石温度が高いほど、変速動作時において油圧制御回路300からブレーキB1,B2に付与される油圧を低く設定し、逆に、基準温度に対してロータ磁石温度が低いほど、変速動作時において油圧制御回路300からブレーキB1,B2に付与される油圧を高く設定するようにしている(変速動作補正手段による変速動作の補正制御)。
この制御動作を実現するために、本実施形態では、上記第2モータジェネレータMG2のロータ磁石温度を推定するためのロータ磁石温度推定マップがECU100のROM102に記憶されている。このロータ磁石温度推定マップは、第2モータジェネレータMG2の駆動履歴、例えば単位期間当たりの駆動回転数と、ロータ磁石温度の上昇量との関係を書き込んだものであって、実験・計算等により経験的に求めた値がマップ化されている。
以下、このブレーキ油圧制御動作を、図9のフローチャートに沿って説明する。この図9に示すブレーキ油圧制御動作のルーチンは、上記ECU100において所定時間(例えば数msec)毎に繰り返して実行される。
先ず、ステップST1において、自動変速機3の変速要求がなされているか否かを判定する。つまり、上述した図7に示す変速マップに従って変速動作を行っている状況で、現在、変速動作を行うべきタイミングにあるか否かを判定する。変速要求が無い場合には、このステップST1でNo判定され、そのまま本ルーチンを終了する。
自動変速機3の変速要求がなされており、ステップST1でYes判定されると、ステップST2において、第2モータジェネレータMG2の駆動履歴から、上述したロータ磁石温度推定マップにより第2モータジェネレータMG2に備えられているロータ磁石の温度を推定する(温度認識手段による温度推定動作)。
そして、ステップST3において、上記推定されたロータ磁石の温度が所定の基準値にあるか否かを判定する。尚、ここでは、推定されたロータ磁石の温度が基準範囲内にあるか否かを判定するようにしてもよい。この基準範囲内は、例えば上記基準温度(75℃)に対して±10℃の範囲内に設定される。この基準範囲は任意に設定可能である。
そして、このステップST3の判定において、ロータ磁石の温度が所定の基準値にあってYesに判定された場合には、ステップST4において、予め設定されている基準ブレーキ油圧を得るためのブレーキ油圧指令値を油圧制御回路300に出力し、この油圧制御回路300に発生する基準ブレーキ油圧によってブレーキB1,B2の係合・解放によるクラッチツークラッチ変速を行う。つまり、ブレーキ油圧の補正動作を行うことなしにクラッチツークラッチ変速を行う。
一方、ロータ磁石の温度が所定の基準値から外れており、ステップST3でNo判定された場合には、ステップST5に移って、上記推定されたロータ磁石の温度が基準値よりも高いか否かを判定する。
ここで、ロータ磁石の温度が基準値よりも高く、Yes判定された場合には、ステップST6に移り、図8に示した指令値に対する実際の出力トルクの乖離量とロータ磁石温度との関係から、温度の影響による出力トルクの乖離量を認識して出力トルクの誤差(負側の誤差)を検出する。その後、ステップST7に移り、上記誤差を考慮した実際のモータ出力トルクを算出する。この場合、上記ロータ磁石温度が基準温度(75℃)である場合の出力トルクから上記乖離量が減算されることで実際のモータ出力トルクが算出される。
そして、この算出された実際のモータ出力トルクに応じてブレーキ油圧の補正量(負側の補正量)をステップST8で求め、ステップST9で、その補正されたブレーキ油圧が得られるようにブレーキ油圧指令値を油圧制御回路300に出力し、この油圧制御回路300に発生するブレーキ油圧によってブレーキB1,B2の係合・解放によるクラッチツークラッチ変速を行う。つまり、ロータ磁石の温度が基準値にある場合よりも低いブレーキ油圧によってブレーキB1,B2の係合・解放によるクラッチツークラッチ変速を行う。
図10は、この場合のモータ回転数、自動変速機3の出力軸トルク、ブレーキ油圧指令値(実線は係合側のブレーキに対する油圧指令値、破線は解放側のブレーキに対する油圧指令値)である。また、図中の一点鎖線はロータ磁石の温度が基準値である場合における係合側のブレーキに対する油圧指令値であり、二点鎖線はロータ磁石の温度が基準値である場合における解放側のブレーキに対する油圧指令値である。
このように、ロータ磁石の温度が基準値にある場合よりも低いブレーキ油圧によってブレーキB1,B2の係合・解放動作を行っている。これにより、自動変速機3がタイアップ状態となることが回避され、変速ショック(タイアップショック)が防止されている。尚、図10に示すものでは、ブレーキB1,B2の係合・解放を行わせるためのブレーキ油圧指令値として、定圧待機油圧及びスイープ油圧の各指令値を共に基準油圧指令値よりも低く設定している。例えば、基準温度に対してロータ磁石温度が10deg高まる毎に、これら定圧待機油圧及びスイープ油圧が5%低下するように指令値を補正する。これら値はこれに限定されるものではない。
一方、ロータ磁石の温度が基準値よりも低く、ステップST5でNo判定された場合には、ステップST10に移り、図8に示した指令値に対する実際の出力トルクの乖離量とロータ磁石温度との関係から、温度の影響による出力トルクの乖離量を認識して出力トルクの誤差(正側の誤差)を検出する。その後、ステップST11に移り、上記誤差を考慮した実際のモータ出力トルクを算出する。この場合、上記ロータ磁石温度が基準温度(75℃)である場合の出力トルクに対して上記乖離量が加算されることで実際のモータ出力トルクが算出される。
そして、この算出された実際のモータ出力トルクに応じてブレーキ油圧の補正量(正側の補正量)をステップST12で求め、ステップST9で、その補正されたブレーキ油圧が得られるようにブレーキ油圧指令値を油圧制御回路300に出力し、この油圧制御回路300に発生するブレーキ油圧によってブレーキB1,B2の係合・解放によるクラッチツークラッチ変速を行う。つまり、ロータ磁石の温度が基準値にある場合よりも高いブレーキ油圧によってブレーキB1,B2の係合・解放によるクラッチツークラッチ変速を行う。
図11は、この場合のモータ回転数、自動変速機3の出力軸トルク、ブレーキ油圧指令値(実線は係合側のブレーキに対する油圧指令値、破線は解放側のブレーキに対する油圧指令値)である。また、図中の一点鎖線はロータ磁石の温度が基準値である場合における係合側のブレーキに対する油圧指令値であり、二点鎖線はロータ磁石の温度が基準値である場合における解放側のブレーキに対する油圧指令値である。
このように、ロータ磁石の温度が基準値にある場合よりも高いブレーキ油圧によってブレーキB1,B2の係合・解放動作を行っている。これにより、第2モータジェネレータMG2に対する所謂負荷抜け状態が回避され、第2モータジェネレータMG2の回転数が急上昇する(吹け上がる)といった状況が防止されている。尚、図11に示すものでは、ブレーキB1,B2の係合・解放を行わせるためのブレーキ油圧指令値として、定圧待機油圧及びスイープ油圧の各指令値を共に基準油圧指令値よりも高く設定している。例えば、基準温度に対してロータ磁石温度が10deg低くなる毎に、これら定圧待機油圧及びスイープ油圧が5%上昇するように指令値を補正する。これら値はこれに限定されるものではない。
以上説明してきたように、本実施形態によれば、第2モータジェネレータMG2のロータ磁石温度が所定の基準温度よりも高いほど変速動作時におけるブレーキB1,B2のトルク容量を小さくするように補正し、逆に、第2モータジェネレータMG2のロータ磁石温度が所定の基準温度よりも低いほど変速動作時におけるブレーキB1,B2のトルク容量を大きくするように補正している。これにより、ロータ磁石温度の変動の影響による第2モータジェネレータMG2の出力トルクの変動に対応して自動変速機3の変速動作を補正することができる。このため、上記タイアップショックによる変速ショックの発生を防止できる。また、第2モータジェネレータMG2の吹け上がりを回避することができ、第2モータジェネレータMG2の駆動部分や摺動部分に掛かる負荷を軽減し、第2モータジェネレータMG2の長寿命化を図ることができる。
(変形例1)
次に、第1実施形態の変形例1について説明する。本変形例に係るハイブリッド車も、上述した第1実施形態のものと同様に、2つのモータ・ジェネレータを備え、且つFR(フロントエンジン・リヤドライブ)車として構成されている。
次に、第1実施形態の変形例1について説明する。本変形例に係るハイブリッド車も、上述した第1実施形態のものと同様に、2つのモータ・ジェネレータを備え、且つFR(フロントエンジン・リヤドライブ)車として構成されている。
図12は本変形例に係るハイブリッド車HVを示す概略構成図である。この図12において上述した第1実施形態のものと同一の構成部材については同一の符号を付し、その説明を省略する。
上述した第1実施形態のハイブリッド車HVでは、第2モータジェネレータMG2の回転軸が自動変速機3の入力軸30に連結され、モータジェネレータMG2の動力を自動変速機3を介してリングギヤ軸(出力軸)21に出力する構造となっていた。
本変形例のものは、それに代えて、第2モータジェネレータMG2の回転軸がリングギヤ軸21に連結され、エンジン1及び2台のモータジェネレータMG1,MG2の動力を自動変速機3を介して出力軸22(駆動輪7)に伝達する構造のハイブリッド車となっている。
このようなハイブリッド車HVに対しても本発明は適用可能である。つまり、第2モータジェネレータMG2のロータ磁石温度が所定の基準温度よりも高いほど変速動作時におけるブレーキB1,B2のトルク容量を小さくするように補正し、逆に、第2モータジェネレータMG2のロータ磁石温度が所定の基準温度よりも低いほど変速動作時におけるブレーキB1,B2のトルク容量を大きくするように補正するものである。
また、このように構成されたハイブリッド車HVの場合、第1モータジェネレータMG1の出力トルクも自動変速機3に入力されることになるため、この第1モータジェネレータMG1に備えられたロータ磁石の温度に応じてブレーキB1,B2のトルク容量を、上述した第1実施形態の場合と同様に補正することが好ましい。
(変形例2)
次に、第1実施形態の変形例2について説明する。本変形例に係るハイブリッド車HVでは、上述した第1実施形態の如くロータ磁石の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正する制御に加えて、上記ブレーキB1,B2における摩擦接触面の表面温度に応じて変速動作時におけるブレーキB1,B2のトルク容量の指令値を更に補正(追加補正)するようにしている。
次に、第1実施形態の変形例2について説明する。本変形例に係るハイブリッド車HVでは、上述した第1実施形態の如くロータ磁石の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正する制御に加えて、上記ブレーキB1,B2における摩擦接触面の表面温度に応じて変速動作時におけるブレーキB1,B2のトルク容量の指令値を更に補正(追加補正)するようにしている。
具体的に、ブレーキB1,B2の係合・解放が繰り返され、その際の摩擦熱等の影響により摩擦接触面の表面温度が高くなると、その表面温度が低い場合に比べて、相手側の摩擦接触面と接触する際における摩擦抵抗が低くなる。このため、ブレーキB1,B2のトルク容量が、第2モータジェネレータMG2の出力トルクに対して相対的に不足した状況を引き起こしてしまう可能性がある。
本実施形態では、このような状況に鑑み、摩擦接触面の表面温度が所定の基準温度(例えば50℃)よりも高いほど、変速動作時におけるブレーキB1,B2のトルク容量の指令値を大きくするように油圧制御回路300に対する油圧指令値を更に補正する。逆に、摩擦接触面の表面温度が所定の基準温度よりも低いほど、変速動作時におけるブレーキB1,B2のトルク容量の指令値を小さくするように油圧制御回路300に対する油圧指令値を更に補正する(追加補正手段によるトルク容量補正動作)。
尚、本変形例では、摩擦接触面の表面温度を推定するための摩擦接触面温度推定マップがECU100のROM102に記憶されている。この摩擦接触面温度推定マップは、ブレーキB1,B2の係合・解放動作の履歴、例えば単位期間当たりの係合・解放の回数と摩擦接触面温度の上昇量との関係を書き込んだものであって、実験・計算等により経験的に求めた値がマップ化されている。
そして、油圧指令値の補正動作として具体的には、上記摩擦接触面温度推定マップに従って摩擦接触面の表面温度を推定し(摩擦接触面温度認識手段による表面温度の推定動作)、基準温度に対して摩擦接触面の表面温度が10deg高くなる毎に、上記定圧待機油圧及びスイープ油圧が2%上昇するように指令値を補正し、基準温度に対して摩擦接触面の表面温度が10deg低くなる毎に、上記定圧待機油圧及びスイープ油圧が2%低下するように指令値を補正する。このように、ロータ磁石の温度変化による油圧補正量に対する影響度合いよりも、摩擦接触面の表面温度の温度変化による油圧補正量に対する影響度合いを小さく設定している。これは、摩擦接触面の表面温度の変化はロータ磁石の温度変化よりも急激である可能性があるので、ブレーキB1,B2のトルク容量が急激に大きく変化して適正値から外れてしまうといったことを回避するためである。上記の値はこれに限定されるものではない。
また、各ブレーキB1,B2は、それぞれ温度が異なっている可能性がある。例えば、係合側のブレーキでは摩擦接触面の表面温度の上昇が急激であるのに対し、解放側のブレーキでは摩擦接触面の表面温度の上昇は緩慢である。この場合、各ブレーキB1,B2毎に摩擦接触面の表面温度に応じて変速動作時におけるトルク容量の補正量を異ならせるようにすることが好ましい。
尚、本変形例2の技術は上記変形例1に係るハイブリッド車HVに対しても適用が可能である。
(第2実施形態)
次に、第2実施形態について説明する。本実施形態に係るハイブリッド車は、2つのモータ・ジェネレータを備え、且つFF(フロントエンジン・フロントドライブ)車として構成されている。
次に、第2実施形態について説明する。本実施形態に係るハイブリッド車は、2つのモータ・ジェネレータを備え、且つFF(フロントエンジン・フロントドライブ)車として構成されている。
図13は本実施形態におけるハイブリッド車両HVの概略構成図である。このハイブリッド車両HVは、所謂シリーズ/パラレルハイブリッド車両として構成されている。以下のハイブリッド車両HVの概略説明では、上述した第1実施形態との相違点について主に説明する。
本実施形態に係るハイブリッド車HVも、エンジン1、第1モータジェネレータMG1、第2モータジェネレータMG2、動力分配機構2、インバータ4、HVバッテリ5、駆動輪7、油圧制御回路、及び、ECU100などを備えている。
また、本実施形態のものは自動変速機を備えておらず、動力分配機構2を介して伝達されたエンジン1の出力トルクや第2モータジェネレータMG2の出力トルクは、減速機8を介して駆動輪(前輪)7に出力されるようになっている。
また、上記HVバッテリ5とインバータ4との間には昇圧コンバータ9が備えられており、HVバッテリ5からモータジェネレータMG1,MG2に給電が行われる際に、バッテリ電圧が昇圧されるようになっている。
このように構成されたハイブリッド車HVに対し、本実施形態では、上記第1モータジェネレータMG1のロータ磁石温度に基づいて、この第1モータジェネレータMG1に対するトルク指令値を補正するようにしている(トルク指令値補正手段によるトルク指令値の補正動作)。以下、具体的に説明する。
上記第1モータジェネレータMG1に対するトルク指令値であるパルス信号は、ロータ磁石温度が75℃(基準温度)となっていることを条件として設定される。つまり、ロータ磁石温度が75℃である場合に、所望の出力トルクを得るべく上記トルク指令値を設定している。
しかしながら、第1モータジェネレータMG1のロータ磁石温度は、第1モータジェネレータMG1の使用状況等に応じて刻々と変動している。このようにロータ磁石温度が変動する状況にあっては、そのロータ磁石温度に応じて第1モータジェネレータMG1の能力が変化することになる。具体的には、ロータ磁石温度が高くなると、第1モータジェネレータMG1に対する指令値によって本来得られるべき出力トルクよりも実際の出力トルクが小さくなる。逆に、ロータ磁石温度が低くなると、第1モータジェネレータMG1に対する指令値によって本来得られるべき出力トルクよりも実際の出力トルクが大きくなる。
このような状況を踏まえ、本実施形態では、ロータ磁石温度に応じて第1モータジェネレータMG1に対する指令値であるパルス信号(トルク指令値)を補正するようにしている。具体的には、基準温度に対してロータ磁石温度が高いほど、第1モータジェネレータMG1からの出力トルクが増大する方向に指令値を補正し、逆に、基準温度に対してロータ磁石温度が低いほど、第1モータジェネレータMG1からの出力トルクが減少する方向に指令値を補正するようにしている。例えば、基準温度に対してロータ磁石温度が10deg高まる毎に、第1モータジェネレータMG1からの出力トルクが5%増大するように指令値を補正し、逆に、基準温度に対してロータ磁石温度が10deg低くなる毎に、第1モータジェネレータMG1からの出力トルクが5%減少するように指令値を補正する。この補正量としてはこれに限定されるものではなく、ロータ磁石温度の変化の影響を受けることなく適正な出力トルクが得られる補正量に設定され、例えば実験・計算等により経験的に求められる。
尚、本実施形態においても、上記第1モータジェネレータMG1のロータ磁石温度を推定するためのロータ磁石温度推定マップがECU100のROM102に記憶されている。このロータ磁石温度推定マップは、第1モータジェネレータMG1の駆動履歴、例えば単位期間当たりの駆動回転数とロータ磁石温度の上昇量との関係を書き込んだものであって、実験・計算等により経験的に求めた値がマップ化されている。
このように、本実施形態では、第1モータジェネレータMG1のロータ磁石温度に基づいて、この第1モータジェネレータMG1に対するトルク指令値を補正するようにし、これにより、ロータ磁石温度の変化の影響を受けることなく適正な出力トルクが常に得られるようにしている。これにより、ハイブリッド車HVの走行安定性及びドライバの要求に応じた走行性能を得ることが可能になる。
また、第2モータジェネレータMG2に対しても同様の指令値補正動作を行うようにしてもよい。つまり、基準温度に対してロータ磁石温度が高いほど、第2モータジェネレータMG2からの出力トルクが増大する方向に指令値を補正し、逆に、基準温度に対してロータ磁石温度が低いほど、第2モータジェネレータMG2からの出力トルクが減少する方向に指令値を補正するものである。
(第3実施形態)
次に、第3実施形態について説明する。本実施形態は、エンジン1の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するようにしたものである。
次に、第3実施形態について説明する。本実施形態は、エンジン1の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するようにしたものである。
具体的に、エンジン(内燃機関)1にあっては、冷間始動直後などのように温度が比較的低い状態では、潤滑油の粘性が高く、これが攪拌抵抗になるなどして出力トルクが低くなる傾向がある。これに対し、暖機完了後、つまり、エンジン1の温度が比較的高い状態になると、上記攪拌抵抗の低減により出力トルクが高くなる傾向がある。
この点を考慮し、本実施形態では、エンジン1の温度(冷却水温センサによって検出される冷却水温度や油温センサによって検出される潤滑油温度)と出力トルクとの相関に基づいて自動変速機3のブレーキB1,B2のトルク容量を補正するようにしている。
具体的には、冷却水温度や潤滑油温度から求められるエンジン1の温度が所定の暖機運転完了温度(例えば冷却水温度で50℃)よりも低いほど、変速動作時におけるブレーキB1,B2のトルク容量を小さくするように補正する。
一方、冷却水温度や潤滑油温度から求められるエンジン1の温度が所定の暖機運転完了温度よりも高いほど、変速動作時におけるブレーキB1,B2のトルク容量を大きくするように補正する。
このように、本実施形態では、ブレーキB1,B2のトルク容量がエンジン出力に対して相対的に過剰となってタイアップショックを招いたり、ブレーキB1,B2のトルク容量がエンジン出力に対して相対的に不足して内燃機関回転数が吹け上がるといった状況を回避することができる。
尚、本実施形態の如くエンジン1の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するといった技術は、上述した各実施形態や変形例に示したハイブリッド車HVに限られるものではなく、エンジン1のみを走行用の駆動源として備えた一般的な車両に対しても適用が可能である。
(第4実施形態)
次に、第4実施形態について説明する。上述した第3実施形態では、エンジン1の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するようにしていた。それに代えて、本実施形態では、エンジン1に吸入される吸気の温度(吸気温センサによって検出される吸気温度)に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するようにしたものである。
次に、第4実施形態について説明する。上述した第3実施形態では、エンジン1の温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するようにしていた。それに代えて、本実施形態では、エンジン1に吸入される吸気の温度(吸気温センサによって検出される吸気温度)に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するようにしたものである。
具体的に、エンジン(内燃機関)1にあっては、吸気の温度が低いほど気筒内への空気の充填効率が高まるため出力トルクとしては高くなる。逆に、吸気の温度が高いほど空気の充填効率が低くなって出力トルクとしては低くなる。
この点を考慮し、本実施形態では、エンジン1に吸入される吸気の温度と出力トルクとの相関に基づいてブレーキB1,B2のトルク容量を補正するようにしている。
具体的には、吸気温度が所定の基準温度(例えば25℃)よりも低いほど、変速動作時におけるブレーキB1,B2のトルク容量を大きくするように補正する。
一方、吸気温度が所定の基準温度よりも高いほど、変速動作時におけるブレーキB1,B2のトルク容量を小さくするように補正する。
このように、本実施形態によっても、ブレーキB1,B2のトルク容量がエンジン出力に対して相対的に過剰となってタイアップショックを招いたり、ブレーキB1,B2のトルク容量がエンジン出力に対して相対的に不足して内燃機関回転数が吹け上がるといった状況を回避することができる。
尚、本実施形態の如くエンジン1の吸気温度に応じて変速動作時におけるブレーキB1,B2のトルク容量を補正するといった技術も、上述した各実施形態や変形例に示したハイブリッド車HVに限られるものではなく、エンジン1のみを走行用の駆動源として備えた一般的な車両に対しても適用が可能である。
−その他の実施形態−
以上説明した各実施形態及び変形例では、2台のモータジェネレータMG1,MG2が搭載されたハイブリッド車HVに本発明を適用した場合について説明したが、これに限らず、1台もしくは3台以上のモータジェネレータが搭載されたハイブリッド車にも本発明は適用可能である。
以上説明した各実施形態及び変形例では、2台のモータジェネレータMG1,MG2が搭載されたハイブリッド車HVに本発明を適用した場合について説明したが、これに限らず、1台もしくは3台以上のモータジェネレータが搭載されたハイブリッド車にも本発明は適用可能である。
また、上述した第1及び第2実施形態及び変形例では、モータジェネレータMG1,MG2の温度をその運転履歴等から推定するようにしたが、温度センサなどによって直接的に温度検出するようにしてもよい。この場合、例えばモータジェネレータMG1,MG2のロータ磁石(回転体)に温度センサを直接的に接触させることは困難であるので、ステータ側に温度センサを取り付け、その検出温度からロータ磁石温度を推定するようにする。また、モータジェネレータMG1,MG2としては交流同期電動機を採用していたが、誘導型モータを適用することも可能である。
また、上記各実施形態及びその変形例では、自動変速機3の摩擦係合要素を油圧式のブレーキB1,B2により構成したが、電磁クラッチにより摩擦係合要素を構成するようにしたものに対しても本発明は適用可能である。この場合、例えば、電磁クラッチに与えるパルス信号のDuty制御によって係合・解放を行わせる場合に、そのDuty比を補正することによって係合動作及び解放動作を制御する。具体的には、例えば電磁クラッチのトルク容量を大きくする場合にはDuty比を増大する方向へ補正し、逆に、電磁クラッチのトルク容量を小さくする場合にはDuty比を減少する方向へ補正する。
また、上記各実施形態及び変形例では、前進2段変速の自動変速機3が搭載された車両に本発明を適用した場合について説明したが、本発明はこれに限られることなく、他の任意の変速段の遊星歯車式自動変速機が搭載された車両にも適用可能である。
更に、各実施形態及び変形例では、駆動源としてエンジン(内燃機関1)と電動機(モータジェネレータ)MG1,MG2とが搭載されたハイブリッド車HVに本発明を適用した例を示したが、本発明はこれに限られることなく、上記第1及び第2実施形態、変形例にあっては、駆動源として電動機(モータジェネレータまたはモータ)のみが搭載された電気自動車(EV)にも適用することができる。
1 エンジン(内燃機関)
3 自動変速機
7 駆動輪
MG1 第1モータジェネレータ(電動機、駆動源)
MG2 第2モータジェネレータ(電動機、駆動源)
B1,B2 ブレーキ(摩擦係合要素)
3 自動変速機
7 駆動輪
MG1 第1モータジェネレータ(電動機、駆動源)
MG2 第2モータジェネレータ(電動機、駆動源)
B1,B2 ブレーキ(摩擦係合要素)
Claims (20)
- 走行用の駆動力を出力する電動機と、この電動機から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置において、
上記電動機の温度を推定または検出する温度認識手段と、
上記温度認識手段によって推定または検出された電動機の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えていることを特徴とする車両の制御装置。 - 上記請求項1記載の車両の制御装置において、
上記温度認識手段は電動機に備えられた磁石の温度を推定または検出するよう構成されていることを特徴とする車両の制御装置。 - 上記請求項1または2記載の車両の制御装置において、
上記変速動作補正手段は、摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を補正するよう構成されていることを特徴とする車両の制御装置。 - 上記請求項3記載の車両の制御装置において、
上記変速動作補正手段は、上記温度認識手段によって推定または検出された電動機の温度が所定の基準温度よりも高いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を小さくするように補正する構成となっていることを特徴とする車両の制御装置。 - 上記請求項3記載の車両の制御装置において、
上記変速動作補正手段は、上記温度認識手段によって推定または検出された電動機の温度が所定の基準温度よりも低いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を大きくするように補正する構成となっていることを特徴とする車両の制御装置。 - 上記請求項4記載の車両の制御装置において、
上記摩擦係合要素は、油圧の供給により係合状態が変更されるようになっており、
上記変速動作補正手段は、摩擦係合要素へ供給する油圧値を低く補正することにより摩擦係合要素のトルク容量を小さくするよう構成されていることを特徴とする車両の制御装置。 - 上記請求項5記載の車両の制御装置において、
上記摩擦係合要素は、油圧の供給により係合状態が変更されるようになっており、
上記変速動作補正手段は、摩擦係合要素へ供給する油圧値を高く補正することにより摩擦係合要素のトルク容量を大きくするよう構成されていることを特徴とする車両の制御装置。 - 上記請求項3、4または5記載の車両の制御装置において、
上記摩擦係合要素は、電磁クラッチにより構成されており、
上記変速動作補正手段は、電磁クラッチを作動させるための電圧値を補正することにより摩擦係合要素のトルク容量を補正するよう構成されていることを特徴とする車両の制御装置。 - 上記請求項3〜8のうち何れか一つに記載の車両の制御装置において、
上記摩擦係合要素の摩擦接触面の表面温度を推定または検出する摩擦接触面温度認識手段と、
上記摩擦接触面温度認識手段によって推定または検出された摩擦接触面の表面温度が所定の基準温度よりも高いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量の指令値を大きくするように補正する変速動作追加補正手段とを備えていることを特徴とする車両の制御装置。 - 上記請求項3〜9のうち何れか一つに記載の車両の制御装置において、
上記摩擦係合要素の摩擦接触面の表面温度を推定または検出する摩擦接触面温度認識手段と、
上記摩擦接触面温度認識手段によって推定または検出された摩擦接触面の表面温度が所定の基準温度よりも低いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量の指令値を小さくするように補正する変速動作追加補正手段とを備えていることを特徴とする車両の制御装置。 - 走行用の駆動力を出力する駆動源と、この駆動源から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置において、
上記駆動源の温度を推定または検出する温度認識手段と、
上記温度認識手段によって推定または検出された駆動源の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えていることを特徴とする車両の制御装置。 - 上記請求項11記載の車両の制御装置において、
上記駆動源は内燃機関であって、
上記温度認識手段は、内燃機関の冷却水温度または潤滑油温度を検出するよう構成されていることを特徴とする車両の制御装置。 - 上記請求項11記載の車両の制御装置において、
駆動源は内燃機関であって、
上記変速動作補正手段は、温度認識手段によって推定または検出された内燃機関の温度が所定の暖機運転完了温度よりも低いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を小さくするように補正する構成となっていることを特徴とする車両の制御装置。 - 上記請求項11記載の車両の制御装置において、
駆動源は内燃機関であって、
上記変速動作補正手段は、温度認識手段によって推定または検出された内燃機関の温度が所定の暖機運転完了温度よりも高いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を大きくするように補正する構成となっていることを特徴とする車両の制御装置。 - 走行用の駆動力を出力する内燃機関と、この内燃機関から駆動輪までの間の動力伝達経路に備えられ且つ摩擦係合要素の係合状態を変更することによって変速動作を行う変速機と、この変速機の変速動作を制御する変速機制御手段とを備えた車両の制御装置において、
上記内燃機関に吸入される吸気の温度を検出する温度認識手段と、
上記温度認識手段によって検出された吸気の温度に基づいて上記変速機制御手段による変速機の変速動作を補正する変速動作補正手段とを備えていることを特徴とする車両の制御装置。 - 上記請求項15記載の車両の制御装置において、
上記変速動作補正手段は、温度認識手段によって検出された吸気の温度が所定温度よりも高いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を小さくするように補正する構成となっていることを特徴とする車両の制御装置。 - 上記請求項15記載の車両の制御装置において、
上記変速動作補正手段は、温度認識手段によって検出された吸気の温度が所定温度よりも低いほど摩擦係合要素の係合状態を変更する際におけるその摩擦係合要素のトルク容量を大きくするように補正する構成となっていることを特徴とする車両の制御装置。 - 走行用の駆動力を出力する電動機と、この電動機にトルク指令値を出力することでこの電動機を駆動制御する電動機制御手段とを備えた車両の制御装置において、
上記電動機の温度を推定または検出する温度認識手段と、
上記温度認識手段によって推定または検出された電動機の温度に基づいて上記電動機制御手段から出力されるトルク指令値を補正するトルク指令値補正手段とを備えていることを特徴とする車両の制御装置。 - 上記請求項18記載の車両の制御装置において、
上記トルク指令値補正手段は、温度認識手段によって推定または検出された電動機の温度が所定温度よりも高いほどトルク指令値を高くするように補正する構成となっていることを特徴とする車両の制御装置。 - 上記請求項19記載の車両の制御装置において、
上記トルク指令値補正手段は、温度認識手段によって推定または検出された電動機の温度が所定温度よりも低いほどトルク指令値を低くするように補正する構成となっていることを特徴とする車両の制御装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007253666A JP2009083583A (ja) | 2007-09-28 | 2007-09-28 | 車両の制御装置 |
| KR1020107006584A KR101076951B1 (ko) | 2007-09-28 | 2008-09-26 | 차량용 제어 장치 |
| EP08834375A EP2197722A2 (en) | 2007-09-28 | 2008-09-26 | Control device for vehicle |
| CN200880108981A CN101808872A (zh) | 2007-09-28 | 2008-09-26 | 车辆的控制装置 |
| PCT/IB2008/002900 WO2009040664A2 (en) | 2007-09-28 | 2008-09-26 | Control device for vehicle |
| US12/679,745 US20100204862A1 (en) | 2007-09-28 | 2008-09-26 | Control device for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007253666A JP2009083583A (ja) | 2007-09-28 | 2007-09-28 | 車両の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009083583A true JP2009083583A (ja) | 2009-04-23 |
Family
ID=40511954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007253666A Pending JP2009083583A (ja) | 2007-09-28 | 2007-09-28 | 車両の制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20100204862A1 (ja) |
| EP (1) | EP2197722A2 (ja) |
| JP (1) | JP2009083583A (ja) |
| KR (1) | KR101076951B1 (ja) |
| CN (1) | CN101808872A (ja) |
| WO (1) | WO2009040664A2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102062205A (zh) * | 2009-11-13 | 2011-05-18 | 富士重工业株式会社 | 电动机变速装置 |
| JP2015133891A (ja) * | 2014-01-13 | 2015-07-23 | 日産自動車株式会社 | 同期電動機のトルク推定システム |
| JP2017005843A (ja) * | 2015-06-09 | 2017-01-05 | 日立オートモティブシステムズ株式会社 | 電動機制御装置 |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4229156B2 (ja) * | 2006-09-06 | 2009-02-25 | トヨタ自動車株式会社 | 動力出力装置およびハイブリッド自動車 |
| DE102008002383A1 (de) * | 2008-06-12 | 2009-12-17 | Zf Friedrichshafen Ag | Verfahren zur Steuerung eines Hybridantriebsstrangs |
| DE112009004511B4 (de) * | 2009-03-19 | 2018-07-12 | Toyota Jidosha Kabushiki Kaisha | STEUERUNGSVORRICHTUNG FüR EINE FAHRZEUGLEISTUNGSÜBERTRAGUNGSVORRICHTUNG |
| CN104118424B (zh) | 2009-12-16 | 2017-06-20 | 本田技研工业株式会社 | 混合动力车辆及其控制方法 |
| WO2011074482A1 (ja) | 2009-12-16 | 2011-06-23 | 本田技研工業株式会社 | ハイブリッド車両及びその制御方法 |
| CN104709278B (zh) | 2009-12-22 | 2017-04-12 | 本田技研工业株式会社 | 混合动力车辆的控制装置 |
| DE112009005481B4 (de) * | 2009-12-26 | 2021-11-11 | Toyota Jidosha Kabushiki Kaisha | Steuerungsgerät für ein Fahrzeugleistungsübertragungssystem |
| WO2012026026A1 (ja) * | 2010-08-26 | 2012-03-01 | 三菱電機株式会社 | 車両用制御装置およびディーゼルハイブリッド車両システム |
| US8636620B2 (en) | 2010-10-28 | 2014-01-28 | Jatco Ltd | Automatic transmission |
| JP5693152B2 (ja) | 2010-11-01 | 2015-04-01 | ジヤトコ株式会社 | 車両の油圧制御装置 |
| JP5693151B2 (ja) | 2010-11-01 | 2015-04-01 | ジヤトコ株式会社 | 車両の制御装置 |
| JP5383626B2 (ja) | 2010-11-01 | 2014-01-08 | ジヤトコ株式会社 | 車両の制御装置 |
| JP5496855B2 (ja) | 2010-11-01 | 2014-05-21 | ジヤトコ株式会社 | 車両の制御装置 |
| JP5496854B2 (ja) | 2010-11-01 | 2014-05-21 | ジヤトコ株式会社 | 車両の制御装置 |
| JP5786216B2 (ja) * | 2010-11-02 | 2015-09-30 | ジヤトコ株式会社 | ハイブリッド車両 |
| JP5501937B2 (ja) * | 2010-11-02 | 2014-05-28 | ジヤトコ株式会社 | ハイブリッド車両の制御装置 |
| JPWO2012104904A1 (ja) * | 2011-01-31 | 2014-07-03 | スズキ株式会社 | ハイブリッド車両の駆動制御装置、制御方法、およびハイブリッド車両 |
| JP5501260B2 (ja) | 2011-02-03 | 2014-05-21 | ジヤトコ株式会社 | 車両の制御装置 |
| CA2827626C (en) * | 2011-02-17 | 2018-05-15 | Allison Transmission, Inc. | Modulation control system and method for a hybrid transmission |
| CN102381177B (zh) * | 2011-08-18 | 2014-10-01 | 奇瑞汽车股份有限公司 | 一种电动四驱混合动力系统及其控制方法 |
| KR101920080B1 (ko) * | 2012-05-04 | 2018-11-19 | 현대모비스 주식회사 | 모터 회전자 온도를 이용한 구동모터제어방법 |
| JP2014007905A (ja) * | 2012-06-26 | 2014-01-16 | Honda Motor Co Ltd | 電動機駆動システムの制御装置 |
| JP5695013B2 (ja) * | 2012-11-02 | 2015-04-01 | 本田技研工業株式会社 | 回転電機の磁石温度推定装置及び磁石温度推定方法 |
| DE112012007231T5 (de) * | 2012-12-17 | 2015-09-24 | Toyota Jidosha Kabushiki Kaisha | Fahrzeugsteuerungsvorrichtung |
| US20150336558A1 (en) * | 2013-01-11 | 2015-11-26 | Honda Motor Co., Ltd. | Hybrid-vehicle control device and control method |
| DE102014204966A1 (de) * | 2013-03-21 | 2014-09-25 | Ford Global Technologies, Llc | Steuerung eines leistungsverzweigten Getriebes für ein Elektrofahrzeug |
| DE112013006934T5 (de) * | 2013-04-11 | 2016-01-21 | Mitsubishi Electric Corporation | Kühlungssteuervorrichtung und Kühlungssteuerverfahren für einen Elektrofahrzeugmotor |
| DE102014218381A1 (de) * | 2014-09-12 | 2016-03-17 | Robert Bosch Gmbh | Messung der Temperatur des Läufers einer elektrischen Maschine |
| KR101576882B1 (ko) * | 2014-09-30 | 2015-12-14 | 현대모비스 주식회사 | 전동식 파워 스티어링 시스템의 페일 세이프 장치 및 방법 |
| KR101855784B1 (ko) * | 2016-11-09 | 2018-05-09 | 현대자동차 주식회사 | 차량용 모터 제어 장치 및 방법 |
| JP6966971B2 (ja) * | 2018-03-28 | 2021-11-17 | 本田技研工業株式会社 | 自動駐車装置 |
| CN112848872A (zh) * | 2021-03-10 | 2021-05-28 | 苏州亚太金属有限公司 | 一种便于调节车速的低成本混合动力系统及其驱动方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5697466A (en) | 1992-11-12 | 1997-12-16 | Kabushikikaisha Equos Research | Hybrid vehicle |
| JP3381613B2 (ja) | 1998-03-20 | 2003-03-04 | 日産自動車株式会社 | ハイブリッド車両の駆動制御装置 |
| DE19932755A1 (de) * | 1999-07-14 | 2001-02-01 | Luk Lamellen & Kupplungsbau | Steuerungsvorrichtung |
-
2007
- 2007-09-28 JP JP2007253666A patent/JP2009083583A/ja active Pending
-
2008
- 2008-09-26 KR KR1020107006584A patent/KR101076951B1/ko not_active Expired - Fee Related
- 2008-09-26 EP EP08834375A patent/EP2197722A2/en not_active Withdrawn
- 2008-09-26 US US12/679,745 patent/US20100204862A1/en not_active Abandoned
- 2008-09-26 CN CN200880108981A patent/CN101808872A/zh active Pending
- 2008-09-26 WO PCT/IB2008/002900 patent/WO2009040664A2/en not_active Ceased
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102062205A (zh) * | 2009-11-13 | 2011-05-18 | 富士重工业株式会社 | 电动机变速装置 |
| JP2011106495A (ja) * | 2009-11-13 | 2011-06-02 | Fuji Heavy Ind Ltd | モータ変速装置 |
| JP2015133891A (ja) * | 2014-01-13 | 2015-07-23 | 日産自動車株式会社 | 同期電動機のトルク推定システム |
| US10072993B2 (en) | 2014-01-13 | 2018-09-11 | Nissan Motor Co., Ltd. | Torque estimating system for synchronous electric motor |
| JP2017005843A (ja) * | 2015-06-09 | 2017-01-05 | 日立オートモティブシステムズ株式会社 | 電動機制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20100063733A (ko) | 2010-06-11 |
| EP2197722A2 (en) | 2010-06-23 |
| WO2009040664A3 (en) | 2010-01-14 |
| WO2009040664A2 (en) | 2009-04-02 |
| CN101808872A (zh) | 2010-08-18 |
| US20100204862A1 (en) | 2010-08-12 |
| KR101076951B1 (ko) | 2011-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009083583A (ja) | 車両の制御装置 | |
| EP3272604B1 (en) | Fail-safe control apparatus for hybrid vehicles | |
| CN112399937B (zh) | 混合动力车辆的电力控制装置及电力控制方法 | |
| US9067592B2 (en) | Control device | |
| CN104487302B (zh) | 车辆 | |
| US9085291B2 (en) | Control system for vehicle | |
| JP2009096326A (ja) | オイルポンプユニットの駆動制御装置及びその駆動制御装置を搭載したハイブリッド車両 | |
| JP2010195313A (ja) | ハイブリッド車両 | |
| CN104684781B (zh) | 用于车辆的控制设备 | |
| JP2008114844A (ja) | ハイブリッド電気自動車用パワートレイン及びその制御方法 | |
| JPWO2014091588A1 (ja) | ハイブリッド車両の制御装置 | |
| WO2013057831A1 (ja) | 車両の制御装置 | |
| JP2008221879A (ja) | 車両の制御装置 | |
| US9688132B2 (en) | Hybrid vehicle | |
| JP2014117006A (ja) | 電動車両およびその制御方法 | |
| US20220194354A1 (en) | Method of supervisory control for power management of a parallel two motor hybrid powertrain | |
| JP4179290B2 (ja) | ハイブリッド車両の電動オイルポンプ駆動制御装置 | |
| US10676076B2 (en) | Control device of vehicle | |
| JP2009190442A (ja) | 車両の制御装置 | |
| JP5716634B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4438772B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4202074B2 (ja) | 車両用駆動制御装置 | |
| JP2001020773A (ja) | 車両の駆動制御装置 | |
| JP2009190436A (ja) | 車両の制御装置 | |
| JP4253937B2 (ja) | 車両用駆動装置の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090129 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20090129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090217 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090623 |