JP2009090525A - 画像形成装置及びその調整方法 - Google Patents
画像形成装置及びその調整方法 Download PDFInfo
- Publication number
- JP2009090525A JP2009090525A JP2007262728A JP2007262728A JP2009090525A JP 2009090525 A JP2009090525 A JP 2009090525A JP 2007262728 A JP2007262728 A JP 2007262728A JP 2007262728 A JP2007262728 A JP 2007262728A JP 2009090525 A JP2009090525 A JP 2009090525A
- Authority
- JP
- Japan
- Prior art keywords
- correction data
- laser
- drive current
- light
- rate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


















Landscapes
- Laser Beam Printer (AREA)
- Control Or Security For Electrophotography (AREA)
- Facsimile Scanning Arrangements (AREA)
Abstract
【課題】レーザ発光遅延による感光ドラムの表面に照射される光の光量のバラツキを抑制し、形成された画像の濃度ムラを低減させる画像形成装置を提供する。
【解決手段】本画像形成装置は、OFS方式の光学系を採用し、所定のデューティー比でレーザ発光素子を駆動させたときの感光ドラムの表面に照射される光量を測定し、一走査ラインにおける各画素ごとに所定の光量に補正するための補正データを決定し、予め記憶しておく。画像形成時に置いては、本画像形成装置は、予め記憶した補正データを用いてレーザ発光素子の駆動電流を補正する。
【選択図】図1
【解決手段】本画像形成装置は、OFS方式の光学系を採用し、所定のデューティー比でレーザ発光素子を駆動させたときの感光ドラムの表面に照射される光量を測定し、一走査ラインにおける各画素ごとに所定の光量に補正するための補正データを決定し、予め記憶しておく。画像形成時に置いては、本画像形成装置は、予め記憶した補正データを用いてレーザ発光素子の駆動電流を補正する。
【選択図】図1
Description
本発明は感光ドラムに静電潜像を形成するレーザープリンタやデジタル複写機などの電子写真方式の画像形成装置及びその調整方法に関するものである。
電子写真方式の画像形成装置は、一般に、感光ドラムに静電潜像を形成するためにレーザ光を照射する。感光ドラムを走査露光する方式としては、レーザをビーム状に形成し光学系によって感光面に走査露光する方式であるラスタスキャン方式が一般的である。
従来、ラスタスキャン方式の中で、図13に示すUFS(Under Field Scanner)方式が一般的に採用されていた。しかし、現在では、更なる高速化の要求に応えるため、UFS方式よりも高速に感光ドラムを走査する方式として図14に示すOFS(Over Field Scanner)方式の光学系を採用するようになってきている。この2つの方式は、ポリゴンミラーに対して、UFS方式がポリゴンミラーの反射面よりも小さな光束を照射する方式であるのに対し、OFS方式ではポリゴンミラーの反射面よりも大きな光束を照射する方式であるという違いがある。
このOFS方式は、UFS方式と比較して、ポリゴンミラーの面数を増やし1回転で描ける走査線の数を増やすとともに、ポリゴンミラーの回転数を上げる(ポリゴンミラーの小型化)ことにより、走査速度を高速化することができる。このような構成とすることで、OFS方式は、騒音、回転数、発熱及び立ち上がり速度の点において、UFS方式よりも有利になったが、主走査方向の照射分布が不均一になるという問題が浮上してきた。この主走査方向の照射分布の不均一性は図15に示すようにポリゴンミラーの反射面の角度が変わることによって起こる反射光量の変化によるものである。
レーザダイオードから出射されるレーザ光は、FFP(Far Field Pattern)特性と呼ばれる均一ではない光強度分布特性を有している。ポリゴンミラーの反射面の幅よりも広い光束がポリゴンミラーに入射する場合、図15に示すようにポリゴンミラー反射面の角度によって、光束における光量分布が異なる領域が反射される。したがって、1走査期間内の反射光量はFFP特性に起因する分布ムラによって変動が生じる。
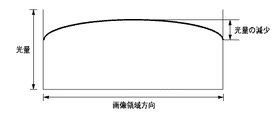
この反射光量の変化により角度の小さい主走査方向の中央付近よりも、角度の大きい主走査方向の端部付近で光量が減少することになる。そのため画像を形成した際、図16に示すように主走査方向の端部で濃度が低下するという問題が発生する。画像形成装置の高速化に加え、高画質で長寿命(高耐久)が求められるためこの濃度変化を補正して濃度変化のない一様な画像を形成する必要がある。
特許文献1は、解像度変換時の濃度変化に関する補正値を記憶手段に記憶しておき、画像の座標に対応した各種補正値と画像データを積算し、補正データとしてレーザ光の発光強度を制御する画像形成装置を提案している。また、特許文献2は、さらに濃度を適正化させる目的で、濃度設定に合わせて印字濃度を補正するためにγカーブを変えて濃度を補正する画像形成装置を提案している。
OFS方式における濃度ムラに関しては、主走査方向のレーザ光量を変えることによって補正されている。レーザ光量を変更する方法としては、大きく2つの方法が存在する。1つはレンズ、反射ミラー、アパーチャなどの光学部品により感光ドラムの表面に照射される光量を均一化させるものである。もう1つは、電気的にレーザの発光電流を変化させることにより、感光ドラムの表面に照射される光量を均一化するものである。前者は補正量を個別に調整することが困難であるので、個々に特性が異なるレーザチップの特性ばらつきに対しては不利であるため、現行では、後者の電気的なレーザ発光制御を行う方式が多用されている。
電気的なレーザ発光制御を行う方式では、1主走査期間における駆動電流量を変化させている。このとき、画像端部よりも画像中央部の駆動電流量を減少させる。この駆動電流の制御により、ドラム面における主走査照度分布を一定に制御している。このような制御を行う場合、通常、図17に示すように1主走査期間において一定の駆動電流変化カーブによって補正を行う。
特開2005−070069号公報
特開2002−172817号公報
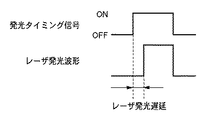
しかしながら、従来技術では、以下の理由により、レーザダイオードの発光遅延を考慮する必要がある。図18は、レーザダイオードのL−I特性を示す図である。レーザダイオードをレーザ発振させるためには、閾値電流以上の駆動電流を与える必要がある。また、レーザダイオードには容量成分が存在し、レーザ駆動回路には寄生容量が存在する。容量成分の影響も加わり、レーザ駆動回路は、レーザダイオードに閾値電流以上の駆動電流を与えるために数ns〜数十ns程度の時間を要する。したがって、レーザ電流を駆動し始めてから、実際にレーザ発振するまでにロス時間が生じるため、図19に示すような発光遅延が発生してしまう。この発光遅延の長さは、主にレーザ電流量に依存する。
図20は、各レーザ電流量における画像データとドラム面光量の関係を示す図である。図20に示すように、レーザ電流量が減少すると、発光遅延が大きくなる。したがって、同じ画像データでレーザを駆動した場合の感光ドラムの表面に照射される光量(ドラム面光量)は、レーザ電流量が小さいほど減少することとなる。
OFS方式では、前述したように電気的なレーザ発光制御を行う方式を用い、1主走査期間におけるレーザ駆動電流量を変化させる。このとき、図16に示すOFS方式の特性を解消するために、画像端部よりも画像中央部のレーザ駆動電流量を減少させる。したがって、画像中央部のレーザ発光遅延量が大きくなる。レーザダイオードをパルス点灯させた場合、主走査方向の照射分布は、図21に示すように画像中央部のレーザ光量が減少する。画像形成を行う場合、このレーザ電流差によって発生する画像中央部のレーザ光量の減少は、画像濃度ムラを引き起こし、画像中央部の濃度が画像端部に比べて薄くなるという問題が発生する。
本発明は、上述の問題に鑑みて成されたものであり、レーザ発光遅延による感光ドラムの表面に照射される光の光量のバラツキを抑制し、形成された画像の濃度ムラを低減させる画像形成装置を提供することを目的とする。
本発明は、例えば、光を出射するレーザ発光手段と、レーザ発光手段から出射された光を像担持体への走査光に変換する回転多面鏡とを備え、回転多面鏡に対して、回転多面鏡の1つの鏡面幅よりも大きな幅の光束を照射させる画像形成装置として実現できる。画像形成装置は、レーザ発光手段を所定のデューティー比で駆動させるとともに、レーザ発光手段を駆動させるための駆動電流を制御する駆動制御手段と、像担持体の一走査ラインにおける各画素に対応する座標を、レーザ発光手段の駆動に合わせて計測する座標計測手段と、所定のデューティー比でレーザ発光手段を駆動させたときに、像担持体に照射された光の各座標ごとの光量を示す主走査照射光量を測定し、測定した主走査照射光量が各座標において目標光量となるように駆動電流に乗算される補正データを決定する補正データ決定手段と、画像形成時において、画像形成を行うための駆動電流に、決定された補正データを乗算することでレーザ発光手段に入力される駆動電流を補正する駆動電流補正手段とを備えることを特徴とする。
また、本発明は、例えば、光を出射するレーザ発光手段と、レーザ発光手段から出射された光を像担持体への走査光に変換する回転多面鏡とを備え、回転多面鏡に対して、回転多面鏡の1つの鏡面幅よりも大きな幅の光束を照射させ、レーザ発光手段を駆動させるための駆動電流に補正データを乗算することでレーザ発光手段に入力される駆動電流を補正する画像形成装置に係る調整方法として実現できる。調整方法は、レーザ発光手段を所定のデューティー比で駆動させるとともに、レーザ発光手段を駆動させるための駆動電流を制御する駆動制御ステップと、像担持体の一走査ラインにおける各画素に対応する座標を、レーザ発光手段の駆動に合わせて計測する座標計測ステップと、所定のデューティー比でレーザ発光手段を駆動させたときに、像担持体に照射された光の各座標ごとの光量を示す主走査照射光量を測定し、測定した主走査照射光量が各座標において目標光量となるように駆動電流に乗算される補正データを決定する補正データ決定ステップとを含むことを特徴とする。
本発明は、例えば、レーザ発光遅延による感光ドラムの表面に照射される光の光量のバラツキを抑制し、形成された画像の濃度ムラを低減させる画像形成装置を提供できる。
以下に本発明の一実施形態を示す。以下で説明される個別の実施形態は、本発明の上位概念、中位概念及び下位概念など種々の概念を理解するために役立つであろう。また、本発明の技術的範囲は、特許請求の範囲によって確定されるのであって、以下の個別の実施形態によって限定されるわけではない。
[第1の実施形態]
以下では、図1乃至図6を参照して、第1の実施形態について説明する。図1は、第1の実施形態に係るプリンタ100の構成を示す図である。本実施形態では、画像形成装置の一適用例として、レーザビームプリンタであるプリンタ100を用いて説明する。しかし、本発明は、画像形成装置としてレーザビームプリンタに限定されず、電子写真方式を用いたファクシミリ、スキャナ、又は、複合機にも適用可能である。また、以下では、主に本発明に関する構成要素について説明を記載する。したがって、本発明に係るプリンタ100は、他の構成要素を含んで構成されてもよい。
以下では、図1乃至図6を参照して、第1の実施形態について説明する。図1は、第1の実施形態に係るプリンタ100の構成を示す図である。本実施形態では、画像形成装置の一適用例として、レーザビームプリンタであるプリンタ100を用いて説明する。しかし、本発明は、画像形成装置としてレーザビームプリンタに限定されず、電子写真方式を用いたファクシミリ、スキャナ、又は、複合機にも適用可能である。また、以下では、主に本発明に関する構成要素について説明を記載する。したがって、本発明に係るプリンタ100は、他の構成要素を含んで構成されてもよい。
プリンタ100は、半導体レーザ1、画像信号生成部2、レーザ駆動制御部3、駆動電流補正部4、コリメートレンズ5、回転多面鏡6、fθレンズ7、ミラー8、主走査同期部9、感光ドラム10、レーザ光量検出部11及びCPU13を備える。本実施形態で適用する光学系は、上述した図14に示すOFS光学系である。したがって、コリメートレンズ5を透過した後の平行光aの光束幅は、回転多面鏡6の1つの反射ミラー面の幅(鏡面幅)よりも広い光束幅となっている。
半導体レーザ1は、レーザ発光手段として機能し、レーザ駆動制御部3から供給される駆動電流に従ってレーザ光を出射する。画像信号生成部2は、記録材に形成する画像の画像データに従ってレーザ発光信号(以下では、画像信号bと称す。)をレーザ駆動制御部3に出力する。レーザ駆動制御部3は、駆動制御手段として機能し、半導体レーザ1を所定のデューティー比で駆動させるとともに、画像信号bに従って駆動電流を制御することで出射光量を制御する。
駆動電流補正部4は、駆動電流補正手段として機能し、半導体レーザ1の出射光量を制御するための補正データをレーザ駆動制御部3に出力する。具体的には、駆動電流補正部4は、画像形成時において、画像形成を行うための駆動電流に、決定された補正データを乗算することで半導体レーザ1に入力される駆動電流を補正する。
コリメートレンズ5は、半導体レーザ1から出射されたレーザ光を平行光aに変換する。回転多面鏡6は、平行光aを感光ドラム10の主走査方向に走査する走査光gに変換する。fθレンズ7は、走査光gの光学的な歪みと走査速度を補正する。ミラー8は、走査光gを反射させて、感光ドラム10の表面に照射させる。主走査同期部9は、回転多面鏡6に反射したレーザ光を受光することにより主走査同期信号(以下では、BD信号dと称する。)を生成する。レーザ光量検出部11は、半導体レーザ1が出射するレーザ光をモニタ光eとして受光する。CPU13は、レーザ駆動制御部3に対して、半導体レーザ1を駆動させるための制御信号kを出力する。
CPU13は、上述したコンポーネントを統括的に制御する。また、本実施形態によれば、CPU13は、補正データ決定手段として機能する。具体的に、CPU13は、所定のデューティー比で半導体レーザ1を駆動させたときに、感光ドラム10に照射された光の各座標ごとの光量を示す主走査照射光量(主走査照射分布)を測定する。さらに、CPU13は、測定した主走査照射光量が各座標において目標光量となるように駆動電流に乗算される補正データを決定する。
以下では、像担持体である感光ドラム10に静電潜像を形成する手順に従って各構成要素の詳細を説明する。プリンタ100は、コントローラ又はホストコンピュータから印字(印刷)コマンドを受信すると、画像形成を開始する。ここで、コントローラは、プリンタ100を統括的に制御し、CPU13に対して印字コマンドを出力する。なお、コントローラが印字コマンドを出力するケースとしては、例えば、プリンタ100に備えられるスキャナによって原稿から読み取られた画像を印刷する場合がある。また、ホストコンピュータは、プリンタ100にネットワークを介して接続された外部装置であり、プリンタ100に対して印字コマンドを送信する。
印字コマンドが送信されると、CPU13は、レーザ駆動制御部3に制御信号kを出力する。レーザ駆動制御部3は、半導体レーザ1を駆動し、レーザ光を出射させる。ここで、主走査同期部9は、回転多面鏡6に反射したレーザ光を受光することによりBD信号dを生成する。このBD信号dは、図1に示すように、レーザ駆動制御部3、駆動電流補正部4及び画像信号生成部2に出力される。
また、半導体レーザ1がレーザ光を出射すると、レーザ光量検出部11は、レーザ光をモニタ光eとして受光し、PD信号hを生成する。PD信号hは、レーザ駆動制御部3及びCPU13に出力される。ここで、モニタ光eは、半導体レーザのリアビーム光として検出する方法が一般的であるが、フロントビーム光をスプリッタやハーフミラーなどで分離検出する方法でも構成できる。レーザ駆動制御部3は、PD信号hを受信するとAPC制御(Auto Power Control制御)を行い、半導体レーザ1の出射光量を一定に制御する。
BD信号dを受信すると、画像信号生成部2は、BD信号dに同期して画像信号bをレーザ駆動制御部3へ出力する。さらに、駆動電流補正部4は、BD信号dに同期して補正データcをレーザ駆動制御部3へ出力する。ここで、補正データcは、主走査方向の座標位置データと、各座標位置における駆動電流値、駆動電流補正量、又は駆動電流補正率とを含む。レーザ駆動制御部3は、画像信号bと補正データcとに基づいて半導体レーザ1を発光制御する。
半導体レーザ1から出射されたレーザ光は、コリメートレンズ5により平行光aに変換され、回転多面鏡6により走査光gに変換される。さらに、走査光gは、fθレンズ7により面倒れ等の光学的な歪みと走査速度とが補正される。fθレンズ7によって光学補正された走査光gは、ミラー8により反射された後、感光ドラム10の表面に照射され、静電潜像を形成する。その後、本実施形態に係るプリンタ100は、感光ドラム10上に形成された静電潜像に対して、現像剤を選択的に付着させ、記録材に転写し、記録材と現像剤を加熱して定着させて印刷を行う。
次に、図2を参照して、駆動電流補正部4の詳細な構成要素について説明する。図2は、第1の実施形態に係る駆動電流補正部4の制御構成を示す図である。なお、以下で説明する制御構成は、一適用例であり、この構成に限定するわけではない。例えば、以下で説明する駆動電流補正部4に含まれる構成要素は、駆動電流補正部4に含まれる必要はなく、駆動電流補正部4に接続される形態でもよい。
駆動電流補正部4は、座標計測カウンタ21、基準電圧生成部22、メモリ23及び補正データ生成部25を備える。記憶手段として機能するメモリ23には、各画素における補正データが不揮発メモリ24に記憶されている。また、駆動電流補正部4は、基準電圧値又は1走査ラインにおける全画素の補正データを制御信号によって増減できる増減部(不図示)を備える。
座標計測カウンタ21は、座標計測手段として機能し、駆動電流補正部4にBD信号eが入力されると、当該BD信号eを基準に主走査方向に対する各画素の座標位置を計測する。具体的に、座標計測カウンタ21は、感光ドラム10の一走査ラインにおける各画素に対応する座標を、半導体レーザ1の駆動に合わせて計測する。座標計測カウンタ21の計測結果を基に各座標位置(各画素)に対応した補正データがメモリ23から読み出され、補正データ生成部25へと出力される。
基準電圧生成部22では、基準電圧Vrefが生成され、補正データ生成部25へと出力される。補正データ生成部25は、補正データと基準電圧Vrefとを乗算し、補正データcを生成する。乗算された補正データcは、レーザ駆動制御部3に出力される。不揮発メモリ24に記憶されている補正データは、CPU13からの制御信号によって、書き換えが可能である。また、駆動電流補正部4は、補正データ出力のON/OFF制御を行い、補正データを基準電圧に乗算するか否かを制御することができる。
次に、図3及び図4を参照して、本実施形態における駆動電流補正データの決定方法について説明する。なお、この補正データの決定は、工場出荷前に実施される。決定した補正データは、不揮発メモリ24に記憶される。図3は、第1の実施形態に係る所定のデューティー(DUTY)比で半導体レーザ1を駆動させた際のレーザ電流と感光ドラム10への照射分布とを示す図である。また、(a)は、工場出荷前において、補正データの出力(光量補正出力)をOFFに設定した場合を示す。一方、(b)は、補正データの出力ONに設定した場合を示す。なお、図3に示すドラム照射分布とは、感光ドラム10に照射されるレーザ光量の積分光量を示す。また、以下では、ドラム照射分布を主走査照射分布又は主走査照射光量とも称す。
図3(a)に示すように、工場では、製品出荷前に、所定のデューティー比で半導体レーザ1を駆動させ、ドラム照射分布を測定する。ここで、所定のデューティー比とは、レーザ駆動制御部3が半導体レーザ1に対して駆動電流(レーザ電流)をパルス出力する際のパルスのON/OFF比を示す。したがって、一走査ラインを1パルスで駆動させる場合のデューティー比は、常にパルス出力がONとなるため、100%となる。
ドラム照射分布が測定されると、ドラム照射分布が目標光量で一定となるような補正データが算出される。ここで、補正データは、各座標位置で測定された光量を目標光量に修正するための駆動電流を制御する値となる。例えば、測定された光量が目標光量よりも大きい場合は、駆動電流を減少させる値が算出される。一方、測定された光量が目標光量よりも小さい場合は、駆動電流を増加させる値が算出される。したがって、図3(a)に示すように、ドラム照射分布において、目標光量を超える画像領域の座標については、駆動電流を低減させる補正値が設定される。この算出した補正データに基づいて駆動電流量を制御したときのレーザ電流分布及びドラム照射分布が図3(b)となる。
ここで、本実施形態に係るプリンタ100では、図18乃至図20を用いて上述した問題を解消することができる。具体的には、上述したように、製品出荷前に所定のデューティー比で目標光量を出力するように設定することで、発光遅延による光量減衰の影響も考慮した駆動電流の補正値を得ることができる。また、これらの補正データは、予め定められた式によって算出されてもよいし、複数回の計測を繰り返す中で調整されてもよい。このように、導出された補正データは、不揮発メモリ24に格納され、画像形成時に読み出されて使用される。なお、プリンタ100は、感光ドラム10などの摩耗を考慮して、製品出荷後においても定期的にこの補正データを調整することが望ましい。
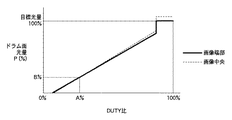
図4は、第1の実施形態に係る駆動電流の補正データを算出した後のデューティー比とドラム面光量の関係を示す図である。図4は、横軸に半導体レーザ1を駆動させる際のデューティー比を示し、縦軸にドラム面光量を示す。ここでは、図3で説明した所定のデューティー比をA%としている。なお、図4に示す実線は画像端部の関係を示す。また、点線は画像中央部の関係を示す。
図4に示すように、A%のデューティー比で半導体レーザ1を駆動させ、このときのドラム照射分布が目標光量で均一となるように補正データを算出している。A%のデューティー比で駆動したときの目標光量は、100%のデューティー比で駆動した際のレーザ光量と比較して、B%のレーザ光量となる。しかし、図4に示すようにデューティー比が100%となる付近において、画像中央のドラム面光量は、画像端のドラム面光量と比べて増加してしまう。この100%付近のデューティー比によるドラム面光量の増加については、以下に説明する画像形成装置に適用することで、影響が軽減されるため、結果として、レーザ駆動電流差による濃度ムラの影響を軽減することができる。
図5は、第1の実施形態に係る画像形成装置における各デューティー比でレーザ駆動したときのドラム面光量とドラム電位の関係を示す図である。図5は、横軸に各デューティー比におけるドラム面光量を示し、縦軸にドラム電位を示す。
図5に示すようにドラム面光量が0%に近いほど、ドラム電位の傾きが大きくなり、ドラム感度としては敏感となる。また、ドラム面光量が100%に近いほど、ドラム電位の傾きが小さくなり、ドラム感度としては鈍感となる。
このような特性を有する感光ドラム10をプリンタ100に採用することにより、ドラム感度が敏感な領域では、ドラム電位の傾きが大きいものの、レーザ発光遅延によるレーザ光量減衰を軽減しているため、濃度ムラの影響を軽減することができる。また、ドラム感度が鈍感な領域では、図4に示したようにデューティー比100%付近のドラム面光量が増加しているものの、ドラム電位の傾きが小さいため、濃度ムラの影響を受けにくい。したがって、このような特性を有する感光ドラム10を採用することで、レーザ駆動電流差による濃度ムラの影響を軽減することができる。
図6は、第1の実施形態に係る補正データを算出する手順を示すフローチャートである。以下で説明する処理はCPU13によって統括的に制御される。
ステップS601において、CPU13は、デューティー比をA%に設定し、このデューティー比に基づいてレーザ駆動制御部3によって半導体レーザ1を発光させる。次に、ステップS602において、CPU13は、感光ドラム10の表面に照射されるドラム面照射分布を測定する。具体的に、CPU13は、感光ドラム10の表面に照射されるレーザ光を測定可能なセンサによってドラム面照射分布を測定する。ここで、レーザ光を測定可能なセンサとは、例えば、受光素子を有し、レーザ光を受光すると、その受光量に応じた信号を出力する光学系のセンサである。また、CPU13は、BD信号dに基づき、主走査方向の座標位置に対応してドラム面照射分布を測定する。
続いて、ステップS603において、CPU13は、ドラム面光量が目標光量で均一となるような補正データを算出する。さらに、ステップS604において、CPU13は、算出した補正データを各座標位置に対応させて不揮発メモリ24に格納する。その後、画像形成時において、駆動電流補正部4は、不揮発メモリ24に格納されている補正データを読み出して、基準電圧Vrefと乗算することにより、補正した駆動電流で半導体レーザ1を駆動させる。
以上のように、本実施形態に係るプリンタ100は、所定のデューティー比でレーザ駆動した際の主走査照射分布(主走査照射光量)を測定し、当該主走査照射分布が各画素において目標光量で均一となるように、駆動電流に乗算する補正データを算出する。これにより、本プリンタ100は、OFS方式を採用した画像形成装置において問題となるレーザ発光遅延による影響を考慮した補正データを生成することができる。したがって、本プリンタ100は、レーザ発光遅延による光量減衰を軽減し、濃度ムラの影響を軽減することができる。また、本実施形態では、デューティー比を所定デューティー比に設定して補正データを算出しているが、画像データの周波数、ドット単位など、少なくとも1つのレーザ発光OFF期間を設けていればよい。
なお、本発明は、上記実施形態に限らず様々な変形が可能である。例えば、本プリンタ100は、決定された補正データを記憶するメモリ(記憶手段)を備えてもよい。これにより、本プリンタ100は、製品出荷前の工場において、補正データを設定することができ、初期起動時の処理を軽減することができる。
[第2の実施形態]
次に、図7及び図8を参照して、第2の実施形態について説明する。本実施形態では、デューティー比が100%の状態で主走査照射分布(主走査照射光量)を測定して補正データを決定した場合に、レーザ発光遅延による光量減衰を軽減する方法について説明する。なお、第1の実施形態と重複する技術については説明を省略する。
次に、図7及び図8を参照して、第2の実施形態について説明する。本実施形態では、デューティー比が100%の状態で主走査照射分布(主走査照射光量)を測定して補正データを決定した場合に、レーザ発光遅延による光量減衰を軽減する方法について説明する。なお、第1の実施形態と重複する技術については説明を省略する。
本実施形態に係るプリンタ100の概略構成は、第1の実施形態と同様であるため説明を省略する。また、本実施形態に係る駆動電流補正部4の構成は、図2と同じである。ただし、本実施形態では、各画素の補正データに加え、各画素のレーザ発光遅延によってレーザ光量が減衰する相対値を示す遅延減衰率が不揮発メモリ24に記憶される。
画像形成時には、座標計測カウンタ21の計測結果を基に各座標位置に対応した補正データと遅延減衰率がメモリ23から読み出され、補正データ生成部25へと出力される。補正データ生成部25は、遅延減衰率の逆数と補正データと基準電圧Vrefとを乗算し、補正データcを生成する。また、メモリ23に記憶されている補正データは、デューティー比が100%でレーザ駆動した際の主走査照射分布が目標光量で均一になるように工場出荷前に算出されたデータである。
以下では図7を参照して遅延減衰率について説明する。図7は、デューティー比を100%に設定してレーザ駆動させた際に主走査照射分布が目標光量で均一となる補正データを用いて駆動電流制御を行ったときのデューティー比とドラム面光量を示す図である。図7は、横軸にデューティー比を示し、縦軸にドラム面光量を示す。また、図中の実線は画像端部の計測結果を示し、点線は画像中央部の計測結果を示す。
図7に示すように、デューティー比をA%でレーザ駆動した際、画像端のレーザ光量はC%となり、画像中央のレーザ光量はD%となる。ここで、本実施形態に係る遅延減衰率は、この画像端のレーザ光量(C%)と各画素のレーザ光量の相対値を示す。即ち、遅延減衰率は、画像端のレーザ光量を目標光量として設定し、他の画素における光量を目標光量に制御するための比である。画像中央部の画素の場合、遅延減衰率は、前述した画像端のレーザ光量相対値であるC%と、画像中央のレーザ光量の相対値であるD%より算出することができる。このように算出された各画素の遅延減衰率は、工場出荷前に算出され、各座標位置に対応付けられて不揮発メモリ24に記憶される。
本実施形態における各画素の遅延減衰率と補正データとに基づいて駆動電流を制御するときのデューティー比とドラム面光量の関係は、第1の実施形態で説明した図4と同等となるため、省略する。したがって、本実施形態に係るプリンタ100は、各画素の遅延減衰率と、デューティー比100%で主走査照射分布が目標光量で均一となる補正データとを用いて駆動電流を制御することにより、第1の実施形態と同等の効果を得ることができる。
図8は、第2の実施形態に係る補正データ及び遅延減衰率を算出する手順を示すフローチャートである。以下で説明する処理は、CPU13によって統括的に制御される。
まず、ステップS801において、CPU13は、補正データの出力をOFFにした状態で、デューティー比を100%に設定して半導体レーザ1を駆動させる。次に、ステップS802において、CPU13は、ドラム面照射分布(主走査照射分布)を測定する。さらに、ステップS803において、CPU13は、補正データ決定手段として機能し、ドラム面照射分布が目標光量で均一となるような補正データを算出する。さらに、ステップS804において、CPU13は、算出された各画素における補正データを不揮発メモリ24に記憶する。さらに、CPU13は、各画素の遅延減衰率を1と設定し、不揮発メモリ24に記憶する。
次に、ステップS805において、CPU13は、補正データの出力をONにした状態で、S804で記憶させた補正データに基づいて駆動電流を制御し、デューティー比をA%に設定して半導体レーザ1を駆動させる。ステップS806において、CPU13は、S805で発光させたレーザ光の主走査照射分布を測定する。さらに、CPU13は、遅延減衰率算出手段として機能し、画像端のレーザ光量を基準とし、画像端のレーザ光量と各画素のレーザ光量より遅延減衰率を算出する。続いて、ステップS807において、CPU13は、S806で算出した各画素における遅延減衰率を不揮発メモリ24に上書きする。ここで、CPU13は、遅延減衰率を変更する変更手段として機能する。さらに、ステップS604において、CPU13は、算出した補正データを各座標位置に対応させて不揮発メモリ24に格納する。その後、画像形成時において、駆動電流補正部4は、不揮発メモリ24に格納されている補正データ及び遅延減衰率を読み出して、基準電圧Vrefと乗算することにより、補正した駆動電流で半導体レーザ1を駆動させる。なお、遅延減衰率は、当該遅延減衰率の逆数に変換されて基準電圧Vrefに乗算される。
以上説明したように、本実施形態に係るプリンタ100は、デューティー比を100%に設定して半導体レーザ1を駆動させたときの主走査照射分布が目標光量で均一となる補正データと、各画素(各座標位置)の遅延減衰率とを予め記憶しておく。これにより、プリンタ100は、補正データと遅延減衰率とに基づいて駆動電流を制御することにより、第1の実施形態と同等の効果を得ることができ、各画素で異なる駆動電流によって引き起こる濃度ムラの影響を軽減することができる。また、本実施形態では、デューティー比を100%に設定して補正データ及び遅延減少率を算出しているため、主走査照射分を測定する際のパルス駆動などを省略することができ、処理を簡略化することができる。
[第3の実施形態]
次に、図9乃至図12を参照して、第3の実施形態について説明する。半導体レーザ1の閾値電流が温度変化の影響によって大きく変動してしまう場合、遅延減衰率が一定であるとレーザ駆動電流差によって引き起こる濃度ムラの影響を軽減しきれないときがある。本実施形態では、半導体レーザ1の閾値電流が温度変化の影響によって大きく変動してしまう場合においても、適正な遅延減衰率を設定し、各画素において異なる駆動電流によって引き起こる濃度ムラの影響を軽減する方法について説明する。なお、第1及び第2の実施形態と同様の技術についての説明は省略する。なお、前提条件として、本実施形態に係る半導体レーザ1の閾値電流は、温度に依存するものとする。また、工場出荷時において、予め各画素の補正データと遅延減衰率とがプリンタ100の不揮発メモリ24に記憶されている。
次に、図9乃至図12を参照して、第3の実施形態について説明する。半導体レーザ1の閾値電流が温度変化の影響によって大きく変動してしまう場合、遅延減衰率が一定であるとレーザ駆動電流差によって引き起こる濃度ムラの影響を軽減しきれないときがある。本実施形態では、半導体レーザ1の閾値電流が温度変化の影響によって大きく変動してしまう場合においても、適正な遅延減衰率を設定し、各画素において異なる駆動電流によって引き起こる濃度ムラの影響を軽減する方法について説明する。なお、第1及び第2の実施形態と同様の技術についての説明は省略する。なお、前提条件として、本実施形態に係る半導体レーザ1の閾値電流は、温度に依存するものとする。また、工場出荷時において、予め各画素の補正データと遅延減衰率とがプリンタ100の不揮発メモリ24に記憶されている。
図9は、第3の実施形態に係るプリンタ100の構成を示す図である。図9に示すように、本実施形態に係るプリンタ100は、第1及び第2の実施形態と同様の構成に加えて、温度検出部12をさらに備える。温度検出部12は、プリンタ100内部に配置されており、プリンタ100の機内温度を測定する。測定された機内温度の情報は、温度信号jとして、CPU13へと出力される。また、温度検出部12は、プリンタ100の表面に配置され、プリンタ100の機外の温度である環境温度を測定してもよい。
図10は、第3の実施形態に係る各温度における半導体レーザ1の駆動電流と光出力の関係を示す図である。図10は、横軸に駆動電流を示し、縦軸に光出力を示す。1001は、20℃での閾値電流を示す。また、1002は、40℃での閾値電流を示す。さらに、1003は、60℃での閾値電流を示す。このように温度が上がることによって閾値電流は増加する。一方、温度が下がることによって閾値電流は減少する。したがって、温度変化に応じて、最適な遅延減衰率を設定する必要がある。
図11は、第3の実施形態に係るプリンタ100の機内温度と遅延減衰率の変化率との関係を示す図である。図11は、横軸に機内温度(℃)を示し、縦軸に遅延減衰率の変化率(%)を示す。遅延減衰率の変化率とは、機内温度25℃の遅延減衰率を100%とし、温度変化の影響によって遅延減衰率が変化を示す割合である。
図11に示すように、機内温度が上がると、閾値電流が増加するため、遅延減衰率が小さくなる。また、機内温度が下がると、閾値電流が減少するため、遅延減衰率は大きくなる。本実施形態に係るプリンタ100は、この機内温度と遅延減衰率の変化率との関係を予め測定しておき、機内温度の変化に応じて最適な遅延減衰率に変更することによって、温度変化に対応した駆動電流で半導体レーザ1を駆動することができる。以下では、この機内温度によって遅延減衰率が変化する変化率を遅延変化率と称す。
本実施形態に係る駆動電流補正部4では、各画素の補正データに加え、各画素の遅延減衰率及び遅延変化率が不揮発メモリ24に記憶される。したがって、画像形成時には、座標計測カウンタ21の計測結果を基に各座標位置に対応した補正データ、遅延減衰率及び遅延変化率が不揮発メモリ24から読み出され、補正データ生成部25へと出力される。補正データ生成部25では、遅延減衰率の逆数と、遅延変化率の逆数と、補正データと、基準電圧Vrefとを乗算し、補正データcを生成する。
不揮発メモリ24に記憶されている補正データ及び遅延減衰率は、第2の実施形態と同等の値が記憶されている。ただし、遅延減衰率に関しては、機内温度25℃を基準温度として算出された遅延減衰率が記憶されている。また、遅延変化率は、機内温度に対する遅延変化率であり、例えば、機内温度が25℃の場合は100%という値が不揮発メモリ24に記憶されている。温度変化に対する遅延変化率の関係が予め測定されており、機内温度が所定温度だけ変化すると、CPU13が最適な遅延変化率に書き換える。本実施形態では、25℃を基準とし、10℃から60℃までの所定温度刻み(例えば5℃刻み)で遅延変化率を測定し、5℃刻み毎の遅延変化率を定義したテーブル(変化率テーブル)がメモリ23に記憶されている。
CPU13は、温度検出部12の検出結果を基にメモリ23に記憶されている遅延変化率テーブルから、機内温度に応じた遅延変化率を選択する。選択された遅延変化率は、CPU13によって不揮発メモリ24に記憶される。具体的に、CPU13は、基準温度又は前回変更した温度から機内温度が5℃変化すると、変化率テーブルを用いて遅延減衰率を変更する。駆動電流補正部4は、不揮発メモリ24に記憶された遅延変化率と、各画素の遅延減衰率と、各画素の補正データと、基準電圧Vrefより、補正データcを生成する。
図12は、第3の実施形態に係る機内温度に応じて最適な遅延変化率を設定する手順を示すフローチャートである。以下で説明する処理は、CPU13によって統括的に制御される。
ステップS1201において、CPU13は、温度検出部12によって機内温度を検出する。続いて、ステップS1202において、CPU13は、温度検出部12の検出結果から機内温度が5℃以上変化したのを検知すると、メモリ23内に記憶された遅延変化率テーブルによって、機内温度に応じた遅延変化率を選択する。さらに、ステップS1203において、CPU13は、選択した遅延変化率を不揮発メモリ24に記憶する。
以上説明したように、本実施形態に係るプリンタ100は、機内温度に応じた遅延変化率を設定することによって、温度変化に依存せず、各画素において異なる駆動電流によって引き起こる濃度ムラの影響を軽減することができる。また、本実施形態では、温度検出部12を設け、機内温度に応じて遅延減衰率の変化率を設定しているが、これに限定されない。半導体レーザ1は、発光時間による耐久劣化によっても、閾値電流が変化する。例えば、プリンタ100にレーザ発光時間を計時するタイマ(計時手段)を設け、レーザ発光時間に応じて遅延減衰率の変化率を設定する構成でもよい。
100:プリンタ
1:半導体レーザ
2:画像信号生成部
3:レーザ駆動制御部
4:駆動電流補正部
5:コリメートレンズ
6:回転多面鏡
7:fθレンズ
8:ミラー
9:主走査同期部
10:感光ドラム
11:レーザ光量検出部
13:CPU
1:半導体レーザ
2:画像信号生成部
3:レーザ駆動制御部
4:駆動電流補正部
5:コリメートレンズ
6:回転多面鏡
7:fθレンズ
8:ミラー
9:主走査同期部
10:感光ドラム
11:レーザ光量検出部
13:CPU
Claims (8)
- 光を出射するレーザ発光手段と、該レーザ発光手段から出射された光を像担持体への走査光に変換する回転多面鏡とを備え、該回転多面鏡に対して、該回転多面鏡の1つの鏡面幅よりも大きな幅の光束を照射させる画像形成装置であって、
前記レーザ発光手段を所定のデューティー比で駆動させるとともに、該レーザ発光手段を駆動させるための駆動電流を制御する駆動制御手段と、
前記像担持体の一走査ラインにおける各画素に対応する座標を、前記レーザ発光手段の駆動に合わせて計測する座標計測手段と、
前記所定のデューティー比で前記レーザ発光手段を駆動させたときに、前記像担持体に照射された光の各座標ごとの光量を示す主走査照射光量を測定し、測定した主走査照射光量が各座標において目標光量となるように前記駆動電流に乗算される補正データを決定する補正データ決定手段と、
画像形成時において、画像形成を行うための駆動電流に、決定された前記補正データを乗算することで前記レーザ発光手段に入力される該駆動電流を補正する駆動電流補正手段と
を備えることを特徴とする画像形成装置。 - 前記駆動電流補正手段は、
決定された前記補正データを、前記座標計測手段によって計測された座標に対応させて記憶する記憶手段を備え、
画像形成時において前記座標計測手段によって計測された座標に対応する補正データを前記記憶手段から読み出して前記駆動電流を補正することを特徴とする請求項1に記載の画像形成装置。 - 前記補正データ決定手段は、
前記所定のデューティー比が100%に設定された状態で測定した前記主走査照射光量から前記補正データを決定した場合に、100%ではない所定のデューティー比及び決定した前記補正データを用いて測定した前記主走査照射光量と、前記座標ごとの目標光量との比である遅延減衰率を算出する遅延減衰率算出手段を備え、
前記駆動電流補正手段は、
前記画像形成を行うための駆動電流に、決定された前記補正データとともに、算出された遅延減衰率の逆数を乗算することで前記レーザ発光手段に入力される該駆動電流を補正することを特徴とする請求項1に記載の画像形成装置。 - 前記駆動電流補正手段は、
決定された前記補正データ及び算出された前記遅延減衰率を、前記座標計測手段によって計測された座標に対応させて記憶する記憶手段を備え、
画像形成時において前記座標計測手段によって計測された座標に対応する補正データ及び遅延減衰率を前記記憶手段から読み出して前記駆動電流を補正することを特徴とする請求項3に記載の画像形成装置。 - 前記画像形成装置の機内温度又は機外の環境温度を検出する温度検出手段をさらに備え、
前記記憶手段は、さらに、前記機内温度又は前記環境温度によって変化する前記遅延減衰率の変化率を定義した変化率テーブルを予め記憶し、
前記補正データ決定手段は、
前記機内温度又は前記環境温度が変化した場合に、前記記憶手段に記憶されている前記遅延減衰率を、前記変化率テーブルを用いて変更する変更手段をさらに備えることを特徴とする請求項4に記載の画像形成装置。 - 前記変化率テーブルは、基準となる基準温度から所定温度刻みで変化率を定義しており、
前記変更手段は、基準温度又は前回変更した温度から、機内温度又は環境温度が5℃変化すると、前記変化率テーブルを用いて前記遅延減衰率を変更することを特徴とする請求項5に記載の画像形成装置。 - 前記レーザ発光手段が駆動された時間を計時する計時手段をさらに備え、
前記記憶手段は、さらに、前記レーザ発光手段が駆動された時間によって変化する前記遅延減衰率の変化率を定義した変化率テーブルを予め記憶し、
前記補正データ決定手段は、
前記計時手段によって計時された時間に応じて、前記記憶手段に記憶されている前記遅延減衰率を、前記変化率テーブルを用いて変更する変更手段をさらに備えることを特徴とする請求項4に記載の画像形成装置。 - 光を出射するレーザ発光手段と、該レーザ発光手段から出射された光を像担持体への走査光に変換する回転多面鏡とを備え、該回転多面鏡に対して、該回転多面鏡の1つの鏡面幅よりも大きな幅の光束を照射させ、前記レーザ発光手段を駆動させるための駆動電流に補正データを乗算することで前記レーザ発光手段に入力される前記駆動電流を補正する画像形成装置に係る調整方法であって、
前記レーザ発光手段を所定のデューティー比で駆動させるとともに、該レーザ発光手段を駆動させるための駆動電流を制御する駆動制御ステップと、
前記像担持体の一走査ラインにおける各画素に対応する座標を、前記レーザ発光手段の駆動に合わせて計測する座標計測ステップと、
前記所定のデューティー比で前記レーザ発光手段を駆動させたときに、前記像担持体に照射された光の各座標ごとの光量を示す主走査照射光量を測定し、測定した主走査照射光量が各座標において目標光量となるように前記駆動電流に乗算される補正データを決定する補正データ決定ステップと
を含むことを特徴とする調整方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007262728A JP2009090525A (ja) | 2007-10-05 | 2007-10-05 | 画像形成装置及びその調整方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007262728A JP2009090525A (ja) | 2007-10-05 | 2007-10-05 | 画像形成装置及びその調整方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009090525A true JP2009090525A (ja) | 2009-04-30 |
Family
ID=40663005
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007262728A Withdrawn JP2009090525A (ja) | 2007-10-05 | 2007-10-05 | 画像形成装置及びその調整方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009090525A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012123369A (ja) * | 2010-11-17 | 2012-06-28 | Canon Inc | 画像形成装置 |
| JP2013010265A (ja) * | 2011-06-29 | 2013-01-17 | Kyocera Document Solutions Inc | 露光装置および画像形成装置 |
-
2007
- 2007-10-05 JP JP2007262728A patent/JP2009090525A/ja not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012123369A (ja) * | 2010-11-17 | 2012-06-28 | Canon Inc | 画像形成装置 |
| JP2013010265A (ja) * | 2011-06-29 | 2013-01-17 | Kyocera Document Solutions Inc | 露光装置および画像形成装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4341908B2 (ja) | 画素クロック及びパルス変調信号生成装置、光走査装置並びに画像形成装置 | |
| JP5754955B2 (ja) | 画像形成装置 | |
| US9665031B2 (en) | Image forming apparatus that forms latent image by irradiating photosensitive member with light | |
| US7196717B2 (en) | Image forming apparatus, control method therefor, and program for implementing the control method | |
| JP5311781B2 (ja) | 画像形成装置及びその制御方法 | |
| JP5672845B2 (ja) | 半導体レーザ駆動装置及び画像形成装置 | |
| JP5824850B2 (ja) | 光学装置および光学装置の制御方法 | |
| JP2008094084A (ja) | 画像形成装置およびその制御方法 | |
| US20130278703A1 (en) | Image forming apparatus and test image forming method | |
| JP2009090525A (ja) | 画像形成装置及びその調整方法 | |
| JP2013147021A (ja) | 光走査装置、光走査装置の光量調整方法、およびプログラム | |
| JP2016109780A (ja) | 光学走査装置及び画像形成装置 | |
| JP5441743B2 (ja) | 画像形成装置及びその光量補正方法 | |
| US7301553B2 (en) | Light source control apparatus and image forming apparatus using the same | |
| JP2005010580A (ja) | 光源制御装置 | |
| JP5441742B2 (ja) | 画像形成装置及びその光量補正方法 | |
| JP2008012852A (ja) | 画像形成装置 | |
| US20250036040A1 (en) | Image forming device and control method therefor | |
| JP3710389B2 (ja) | 画像形成装置 | |
| JP6179303B2 (ja) | 光走査装置、光走査装置の光源発光方法及び画像形成装置 | |
| JP5151557B2 (ja) | マルチビーム画像形成装置 | |
| US20120327169A1 (en) | Exposure apparatus, adjustment method therefor, and image forming apparatus | |
| JP2011235578A (ja) | Ld制御装置および画像形成装置 | |
| JP2009128484A (ja) | 光学走査装置及びこれを含む画像形成装置 | |
| JP2007168309A (ja) | 光学走査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20101207 |