JP2009090747A - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2009090747A JP2009090747A JP2007261559A JP2007261559A JP2009090747A JP 2009090747 A JP2009090747 A JP 2009090747A JP 2007261559 A JP2007261559 A JP 2007261559A JP 2007261559 A JP2007261559 A JP 2007261559A JP 2009090747 A JP2009090747 A JP 2009090747A
- Authority
- JP
- Japan
- Prior art keywords
- torque
- command value
- signal
- steering
- switching means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】メイントルク信号、サブトルク信号の差が大きい場合でも、一定期間はパワーアシストを継続可能とした電動パワーステアリング装置を提供する。
【解決手段】二つのトルク信号を出力可能なトルクセンサ、モータ、操舵補助指令値演算器、モータ駆動回路、及びトルク信号切換部を備えた制御装置とを備えた電動パワーステアリング装置において、トルクセンサはトルク検出ブリッジ回路の各アースに流れる電流を遮断する第1のスイッチング手段を備え、制御装置は、二つのトルク信号の差を監視し、その差が閾値を超える期間が所定時間継続した場合に第1のスイッチング手段を開放し、その時のトルクセンサからのトルク信号を各トルク信号のオフセット値とし、オフセット値どうしを比較し小さいオフセット値を持つトルク信号が操舵補助指令値に入力されるように切換部を切換え、かつ第1のスイッチング手段を導通させるように制御する異常診断手段を備える。
【選択図】図2
【解決手段】二つのトルク信号を出力可能なトルクセンサ、モータ、操舵補助指令値演算器、モータ駆動回路、及びトルク信号切換部を備えた制御装置とを備えた電動パワーステアリング装置において、トルクセンサはトルク検出ブリッジ回路の各アースに流れる電流を遮断する第1のスイッチング手段を備え、制御装置は、二つのトルク信号の差を監視し、その差が閾値を超える期間が所定時間継続した場合に第1のスイッチング手段を開放し、その時のトルクセンサからのトルク信号を各トルク信号のオフセット値とし、オフセット値どうしを比較し小さいオフセット値を持つトルク信号が操舵補助指令値に入力されるように切換部を切換え、かつ第1のスイッチング手段を導通させるように制御する異常診断手段を備える。
【選択図】図2
Description
電動パワーステアリング装置において、特にトルクセンサの信号故障のうち中間的な故障であるオフセットやドリフトの故障を精度良く検出することを可能とする電動パワーステアリング装置に関する。
自動車や車両のステアリング装置をモータの回転力で補助負荷付勢する電動パワーステアリング装置は、モータの駆動力を、減速機を介してギア又はベルト等の伝達機構により、ステアリングシャフト或いはラック軸に補助負荷付勢するようになっている。かかる従来の電動パワーステアリング装置は、アシストトルク(操舵補助トルク)を正確に発生させるため、モータ電流のフィードバック制御を行っている。フィードバック制御は、電流指令値とモータ電流検出値との差が小さくなるようにモータ印加電圧を調整するものであり、モータ印加電圧の調整は、一般的にPWM(パルス幅変調)制御のデューティ比の調整で行っている。
ここで、電動パワーステアリング装置の一般的な構成を図8に示して説明すると、操向ハンドル1の軸2は減速ギア3、ユニバーサルジョイント4a及び4b、ピニオンラック機構5を経て操向車輪のタイロッド6に結合されている。軸2には、操向ハンドル1の操舵トルクを検出するトルクセンサ10が設けられており、操向ハンドル1の操舵力を補助するモータ20が減速ギア3を介して軸2に結合されている。パワーステアリング装置を制御するコントロールユニット30には、バッテリ14からイグニションキー11を経て電力が供給され、コントロールユニット30は、トルクセンサ10で検出された操舵トルクTと車速センサ12で検出された車速Vとに基いてアシスト指令の操舵補助指令値Irefの演算を行い、演算された操舵補助指令値Irefに基いてモータ20に供給する電流を制御する。
コントロールユニット30は主としてCPUで構成されるが、そのCPU内部においてプログラムで実行される一般的な機能を示すと、図9のようになっている。
コントロールユニット30の機能及び動作を説明すると、トルクセンサ10で検出されて入力される操舵トルクTは、操舵系の安定性を高めるために位相補償器(図示せず)で位相補償され、位相補償された操舵トルクTが操舵補助指令値演算器32に入力される。又、車速センサ12で検出された車速Vも操舵補助指令値演算器32に入力される。操舵補助指令値演算器32は、入力された操舵トルクT及び車速Vに基いてモータ20に供給する電流の制御目標値である操舵補助指令値Irefを算出する。なお、図示しない特性マップ(ルックアップテーブル)を参照して操舵補助指令値Irefを決定するようにしてもよい。
操舵補助指令値Irefは減算器30Aに入力されると共に、応答速度を高めるためのフィードフォワード系の微分補償器34に入力され、減算器30Aで求められる偏差(Iref−i)は比例演算器35に入力され、その比例出力は加算器30Bに入力されると共にフィードバック系の特性を改善するための積分演算器36に入力される。微分補償器34及び積分演算器36の出力も加算器30Bに加算入力され、加算器30Bでの加算結果である電流指令値Eが、モータ駆動信号としてモータ駆動回路37に入力される。モータ20のモータ電流値iはモータ電流検出回路38で検出され、モータ電流検出値iは減算器30Aに入力されてフィードバックされる。
ここにおいて、従来、トルクセンサ10として、メイントルク信号TMとサブトルク信号TSとを出力する形式のものが使用されている。トルクセンサ10が故障した場合の安全対策のためであり、1つの信号出力では故障か否かを判断できないためである。そして、従来はメイントルク信号TMとサブトルク信号TSの差を監視して、その差が所定値以上の状態で所定時間継続した場合に異常確定と判断し、アシストをOFF又は制限するようにしている(特許文献1参照)。
上述のメイントルク信号TMとサブトルク信号TSとを出力する形式のトルクセンサとして、下記特許文献2に開示されているものがある。図10は、そのトルクセンサのトルク検出回路のブロック図である。トルク検出回路100はコネクタ129を介して図示しない制御装置に接続され、制御装置からは各回路要素に電源電圧V及び基準電圧Vrefがノイズフイルタ128を経て供給され、検出されたメイン検出トルク信号及びサブ検出トルク信号が制御装置に出力される。トルクを検出するブリッジ回路は、検出コイルL1と抵抗R1とが直列に接続された第1のアームと、検出コイルL2と抵抗R2とが直列に接続された第2のアームとから構成される。発振部121は電源電圧V及び基準電圧Vrefの供給を受けて所定周波数の交流電圧を出力する。出力された交流電圧は電流増幅部122で増幅され、増幅された交流電圧Voscが、検出コイルL1と抵抗R1とで構成されたブリッジ回路の第1のアーム、及び検出コイルL2と抵抗R2とで構成されたブリッジ回路の第2のアームに供給される。検出コイルL1及び検出コイルL2の両端に表れる電圧信号は、メイン増幅・全波整流部123において両検出コイルの差分の信号に変換されて増幅されると共に整流され、更にメイン平滑・中立調整部126で出力波形が調整された後、ノイズフイルタ128を経てメイン検出トルク信号として制御装置に出力される。
さらに、検出コイルL1及び検出コイルL2の両端に表れる電圧信号は、サブ増幅・全波整流部124において両検出コイルの差分の信号に変換されて増幅されると共に整流され、更にサブ平滑・中立調整部127で出力波形が調整された後、ノイズフイルタ128を経てサブ検出トルク信号として制御装置に出力される。
トルク検出回路100をメイン増幅・全波整流部123とメイン平滑・中立調整部126、及びサブ増幅・全波整流部124とサブ平滑・中立調整部127との2組設け、2組の検出トルク信号を出力するように構成されているのは、図示しない制御回路においてこれ等の2組の信号を比較することで、回路要素の故障等を検出するためである。また、トルク検出回路100には、サブ増幅・全波整流部124とサブ平滑・中立調整部127との間に監視部125が設けられている。監視部125は、検出コイルL1又はL2と抵抗R1又はR2との接触不良を接触抵抗の増加により検出するものである。
しかしながら、かかる従来のメイントルク信号とサブトルク信号との差による診断では、メイントルク信号とサブトルク信号のどちらかが正常であっても、モータによるアシストを停止ないしは制限していた。そのため、車重の大きい車両においては、上記診断でアシスト停止してしまうと、運転者の操舵力だけで、駐車場等での据え切りまたは低車速での操舵を行うのは困難となってしまうという問題があった。
本発明は、かかる従来技術における問題に鑑み為されたものであり、メイントルク信号、サブトルク信号の差が大きくなった場合でも、一定期間はパワーアシストを継続可能とした電動パワーステアリング装置を提供することを目的とする。
本発明は、オフセットやドリフトの故障を精度良く検出することを可能とする電動パワーステアリング装置に関し、本発明の上記目的は、ステアリングに印加された操舵トルクに応じて二つのトルク信号を出力可能なトルクセンサと、ステアリング機構に操舵補助力を与えるモータと、前記二つのトルク信号のうちの選択されたトルク信号に基づいて操舵補助指令値を算出する操舵補助指令値演算器、前記操舵補助指令値と前記モータの電流検出値とから演算される電流指令値に基づいて前記モータを駆動するモータ駆動回路、及び前記操舵補助指令値演算器に入力される前記トルク信号を切り換える切換部を備えた制御装置とを備えた電動パワーステアリング装置において、
前記トルクセンサはトルク変化を電気信号として検出するブリッジ回路の各アームに流れる電流を遮断する第1のスイッチング手段を備え、前記制御装置は、さらに、前記二つのトルク信号の差を監視し、その差が所定の閾値を超える期間が所定時間継続した場合に前記第1のスイッチング手段を開放させる信号を前記トルクセンサに送って開放させ、そのときの前記トルクセンサから出力される前記トルク信号を前記各トルク信号の各オフセット値とし、該オフセット値どうしを比較して大きくない方のオフセット値を持つトルク信号が前記操舵補助指令値に入力されるように前記切換部を切り換えるとともに、前記第1のスイッチング手段を導通させるように制御する異常診断手段を備えることによって達成される。
前記トルクセンサはトルク変化を電気信号として検出するブリッジ回路の各アームに流れる電流を遮断する第1のスイッチング手段を備え、前記制御装置は、さらに、前記二つのトルク信号の差を監視し、その差が所定の閾値を超える期間が所定時間継続した場合に前記第1のスイッチング手段を開放させる信号を前記トルクセンサに送って開放させ、そのときの前記トルクセンサから出力される前記トルク信号を前記各トルク信号の各オフセット値とし、該オフセット値どうしを比較して大きくない方のオフセット値を持つトルク信号が前記操舵補助指令値に入力されるように前記切換部を切り換えるとともに、前記第1のスイッチング手段を導通させるように制御する異常診断手段を備えることによって達成される。
また、本発明の上記目的は、ステアリングに印加された操舵トルクに応じて二つのトルク信号を出力可能なトルクセンサと、ステアリング機構に操舵補助力を与えるモータと、前記二つのトルク信号のうちの選択されたトルク信号に基づいて操舵補助指令値を算出する操舵補助指令値演算器、前記操舵補助指令値と前記モータの電流検出値とから演算される電流指令値に基づいて前記モータを駆動するモータ駆動回路、及び前記操舵補助指令値演算器に入力される前記トルク信号を切り換える切換部を備えた制御装置とを備えた電動パワーステアリング装置において、
前記トルクセンサはトルク変化を電気信号として検出するブリッジ回路の各アームに流れる電流を遮断する第1のスイッチング手段を備え、前記制御装置は、さらに、前記二つのトルク信号の差を監視し、その差が所定の閾値を超える期間が所定時間継続した場合に前記第1のスイッチング手段を開放させる信号を前記トルクセンサに送って開放させ、そのときの前記トルクセンサから出力される前記トルク信号を前記各トルク信号の各オフセット値とし、該オフセット値のうちの予め選択した一方のオフセット値を補正値として出力するとともに、前記第1のスイッチング手段を導通させるように制御する異常診断手段と、前記切換部と前記操舵補助指令値演算器との間に配置され、前記異常診断手段から出力されたオフセット値によって前記トルク信号を補正する補正手段とを備えることによって達成される。
前記トルクセンサはトルク変化を電気信号として検出するブリッジ回路の各アームに流れる電流を遮断する第1のスイッチング手段を備え、前記制御装置は、さらに、前記二つのトルク信号の差を監視し、その差が所定の閾値を超える期間が所定時間継続した場合に前記第1のスイッチング手段を開放させる信号を前記トルクセンサに送って開放させ、そのときの前記トルクセンサから出力される前記トルク信号を前記各トルク信号の各オフセット値とし、該オフセット値のうちの予め選択した一方のオフセット値を補正値として出力するとともに、前記第1のスイッチング手段を導通させるように制御する異常診断手段と、前記切換部と前記操舵補助指令値演算器との間に配置され、前記異常診断手段から出力されたオフセット値によって前記トルク信号を補正する補正手段とを備えることによって達成される。
さらに、本発明の上記目的は、前記第1のスイッチング手段が開放されている間は、前記第1のスイッチング手段が開放される直前の前記操舵補助指令値演算器に入力されていたトルク信号の記憶値に基づいてアシスト制御を行うことにより効果的に達成される。
またさらに、本発明の上記目的は、前記ブリッジ回路のいずれか一方のアームの所定のインピーダンス素子を短絡させる第2のスイッチング手段を備え、前記各アームに流れる電流を遮断する第1のスイッチング手段が正常に導通状態に復帰することを第2スイッチング手段を短絡させることで確認することによって効果的に達成される。
本発明に係る電動パワーステアリング装置によれば、メイントルク信号とサブトルク信号の差による診断でオフセットやドリフトの異常と判定されても、すぐにアシスト停止とされず、オフセット値が大きくない方のトルク信号を用いるか、若しくは検出されたオフセット値(ドリフト分を含む。)で補正したトルク信号を用いてアシスト制御を継続できる。
本発明に係る電動パワーステアリング装置は、トルクセンサの信号故障のうち中間的な故障であるオフセットやドリフトの故障を精度良く検出することを可能とする電動パワーステアリング装置に関するものであり、メイントルク信号とサブトルク信号との差を監視し、その差が所定の値を超える期間が所定の時間継続した場合に、トルクセンサの検出電圧(たとえば、図10における検出コイルL1及び検出コイルL2の両端に表れる電圧信号)を強制的に等しくしてトルク中立状態を人為的に作り出し、その結果出力されるトルク信号(メイン及びサブ)をオフセット値(ドリフト分も含む。)とみなして、両者を比較し、オフセット値が大きい方を異常とみなし、オフセット値が大きくない方のトルク信号を用いてアシストを継続するようにしたものである(実施例1)。
また、上記と同じ方法によってメイントルク信号(又はサブトルク信号)のオフセット値を検出し、そのオフセット値で補正したメイントルク信号(又はサブトルク信号)を用いてアシストを継続するようにしてもよい(実施例2)。なぜならば、もしメイントルク信号(又はサブトルク信号)が異常であると仮定しても、そのときのオフセット値を用いてメイントルク信号(又はサブトルク信号)を(応急的に)補正するので、短時間であれば正常な場合と結果的には同程度のアシストが可能になるからである。
以下、上記2つの実施例について図面に基づいて具体的に説明する。
図1は、本発明に係る電動パワーステアリング装置に使用するトルクセンサの出力特性の一例を示すものであり、メイントルク信号(Vtm)とサブトルク信号(Vts)が相反する方向に変化するクロス特性の例を示している。出荷時においては、トルク検出機構の機械的バラツキ、検出回路の素子の電気的なバラツキを補正し、図1中の点線で示す特性になるように調整している。
しかしながら、実際に作動している場合には、使用環境の温度による回路素子の温度ドリフトの増大、あるいは経年変化による特性劣化により、出荷時の特性に対してズレを生じ、図の実線で示すような値にシフトすることが考えられる。Th=0、すなわちトルク中立状態のときのトルク信号(Vtm、Vts)がオフセット値(offs1、offs2)となる。
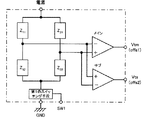
図2は本発明に係る電動パワーステアリング装置に使用されるトルクセンサ10の模式図であり、図10に示す従来のトルクセンサのブリッジ回路のL1とL2の接続点とアース(0Vレベル)の間に第1のスイッチング手段を挿入し、外部からのスイッチ開放信号SW1によって開放可能なように構成したものである。図2において、Z11は図10のR1に、Z12は図10のL1に、Z21は図10のR2に、Z22は図10のL2にそれぞれ対応している。他の構成には基本的な違いはない。第1のスイッチング手段としては、例えば、トランジスタやFET等が利用可能である。なお、第1のスイッチング手段は、Z11とZ21の接続点と電源との間に挿入してもよい。
図3は本発明に係る電動パワーステアリング装置の実施例1の構成を示すブロック図である。図9に示す従来の電動パワーステアリング装置と異なる箇所は、前述の通りトルクセンサ10に第1のスイッチング手段が設けられていること、コントロールユニット(以下、制御装置という。)30内に、トルクセンサ10から出力されるメイントルク信号(Vtm)及びサブトルク信号(Vts)を監視し、異常発生の有無を診断して、異常発生と診断した場合はオフセット診断モードへ移行して前記の第1のスイッチング手段に対してスイッチ開放信号SW1を与えるとともに、後述の切換部42に対して操舵補助指令値32へ入力するトルク信号を切り換えるためのトルク入力切換信号を与える異常診断手段41を備えていること、前記トルク入力切換信号によって操舵補助指令値32へ入力するトルク信号を切り換える切換部42、及びオフセット診断モードへ移行する直前のメイントルク信号を記憶しておくための記憶部43を備えている点である。それ以外の部分については同じでるので、図9と同じ符号を付けている。
次に、図4に示すフローチャートを参照して、本発明に係る電動パワーステアリング装置の実施例1の動作について説明する。
車両のイグニションキーがONされると、オフセット診断モードであるかが判断される(ステップS1)。デフォルトは通常モードになっているので、「NO」であるので、ステップS2に進み、異常診断手段41にそのときのメイントルク信号Vtmとサブトルク信号Vtsが読み込まれ(ステップS2、S3)、両者の差が演算される(ステップS4)。
差が所定値を超える期間が所定時間(たとえば1分間)継続した場合は何らかの異常が発生したものと診断し(ステップS5の“YES”)、オフセット診断モードに移行するとともに(ステップS6)、異常診断手段41から切換部42に対してトルク入力切換信号が与えられて、切換部42のスイッチがb側に切り換えられ、記憶部43に記憶されるメイントルク信号が切換直前の値にFIXされて、オフセット診断時トルクVtoffとして保持される(ステップS7)。一方、ステップS5において“NO”であればそのままアシストを継続し、また初めに戻って異常診断を行う。
オフセット診断モードに移行すると、ステップS1において“YES”となるので、ステップS8に進み、操舵補助指令値演算器32は、記憶部43に記憶されているオフセット診断時トルクVtoffに基づいて操舵補助指令値を算出し、それに基づいてステアリングのアシストを制御する。
それと同時に、異常診断手段41からトルクセンサ10に対してスイッチ開放信号SW1が出力され、第1のスイッチング手段が開放される(ステップS9)。第1のスイッチング手段が開放されると操舵トルクThは見かけ上0になるので、Vtm=offs1、Vts=offs2となる。offs1、offs2は異常診断手段41に入力され(ステップS10)、複数周期分の平均値がそれぞれ算出され(この平均値を“オフセット値”という。)、異常診断手段41内の図示しないメモリに格納される(ステップS11)。オフセット値がメモリに格納されるとスイッチ開放信号SW1がOFFになり、第1のスイッチング手段が導通して(ステップS12)、トルクセンサ10からは元のようにVtm及びVtsが出力される。それと同時にオフセット診断モードを解除し(ステップS13)、メモリに格納されているoffs1、offs2の比較が行われる(ステップS14)。メイントルク信号のオフセット値であるoffs1の方が大きい場合(ステップS15の“YES”)はメイントルク信号の方により大きな異常が発生したものと判断して、サブトルク信号(Vts)を用いてアシスト制御を行うべく、トルク入力切換信号によって切換部42のスイッチをb側からc側に切り換える(ステップS16)。一方、offs1の方が小さい場合は、サブトルク信号の方に異常が発生したものと判断して、メイントルク信号(Vtm)を用いてアシスト制御を行うべく、トルク入力切換信号によって切換部42のスイッチをb側からa側に切り換える(ステップS17)。
なお、以上の処理はあくまでも応急的な処理であるので、暫定的なアシスト制御に切り換えた後に、トルクセンサ系に異常が発生したことを運転者に報知する(ステップS18)。例えばアラームを鳴らすかランプを点滅させるような措置を採る。
また、上記ステップS12で開放解除(導通)信号を送ったとしても、第1のスイッチング手段が常時開放した状態で故障しているとオペアンプの2つの入力は常に同電位となり、トルク中立状態と同様となり、正常なアシストが出来なくなると同時に、この状態を制御装置側では異常と診断できないという問題がある。従って、第1のスイッチング手段が正常に導通したことを確認する必要がある。
そこで、図5に示すように、負荷Z11に並列に第2のスイッチング手段を接続し、第1のスイッチング手段を導通状態に戻す信号SW1を入力した後、第2のスイッチング手段にスイッチ動作チェック信号SW2を与えてZ11を短絡させ、検出部ブリッジ回路のインピーダンスのバランスを故意に大きく崩れさせ、正常使用範囲外のトルク出力信号となることを確認することにより、第1のスイッチング手段が正常に導通していることを確認することができる。
なお、第2のスイッチング手段をZ11に並列にではなく、第1のスイッチング手段に並列に接続し、2個の並列構成とし冗長度UPを図っても良い。
または、第2のスイッチング手段を設けずに電動パワーステアリング装置のモータの回転の有無や車輪速左右差などからトルク中立状態ではないことを推定し、第1のスイッチング手段が正常に導通していることを確認してもよい。
図6は本発明に係る電動パワーステアリング装置の実施例2の構成を示すブロック図である。図3に示す実施例1の電動パワーステアリング装置と異なる箇所は、トルクセンサ10から出力されるメイントルク信号(Vtm)及びサブトルク信号(Vts)を監視し、異常発生の有無を診断して、異常発生と診断した場合はオフセット診断モードへ移行してメイントルク信号のオフセット値を取得した後に、そのオフセット値(補正値)によってメイントルク信号を補正する補正手段44を設け、補正後のメイントルク信号に基づいて操舵補助指令値を算出してアシスト制御を行う点である。
次に、図7に示すフローチャートを参照して、本発明に係る電動パワーステアリング装置の実施例2の動作について説明する。
車両のイグニションキーがONされると、オフセット診断モードであるかが判断される(ステップS21)。デフォルトは通常モードになっているので、「NO」であるので、ステップS22に進み、異常診断手段41にそのときのメイントルク信号Vtmとサブトルク信号Vtsが読み込まれ(ステップS22、S23)、両者の差が演算される(ステップS24)。
差が所定値を超える期間が所定時間(たとえば1分間)継続した場合は何らかの異常が発生したものと診断し(ステップS25の“YES”)、オフセット診断モードに移行するとともに(ステップS26)、異常診断手段41から切換部42に対してトルク入力切換信号が与えられて、切換部42のスイッチがb側に切り換えられ、記憶部43に記憶されるメイントルク信号が切換直前の値にFIXされて、オフセット診断時トルクVtoffとして保持される(ステップS27)。一方、ステップS25において“NO”であればそのままアシストを継続し、また初めに戻って異常診断を行う。
オフセット診断モードに移行すると、ステップS21において“YES”となるので、ステップS28に進み、操舵補助指令値演算器32は、記憶部43に記憶されているオフセット診断時トルクVtoffに基づいて操舵補助指令値を算出し、それに基づいてステアリングのアシストを制御する。
それと同時に、異常診断手段41からトルクセンサ10に対してスイッチ開放信号SW1が出力され、第1のスイッチング手段が開放される(ステップS29)。第1のスイッチング手段が開放されると操舵トルクThは見かけ上0になるので、Vtm=offs1、Vts=offs2となる。offs1、offs2は異常診断手段41に入力されるが、本実施例の場合は一方のみあればいいので、例えばoffs1を取得する(ステップS30)。これを複数周期分サンプリングして平均値を算出し(ステップS31。この平均値を“オフセット値”という。)、異常診断手段41内の図示しないメモリに格納する(ステップS32)。オフセット値がメモリに格納されるとスイッチ開放信号SW1がOFFになり、第1のスイッチング手段が導通して(ステップS33)、トルクセンサ10からは元のようにVtm及びVtsが出力される。それと同時にオフセット診断モードを解除し(ステップS34)、トルク入力切換信号によって切換部42のスイッチをb側からa側に切り換えるとともに、メモリに格納されているoffs1が補正手段44に入力され、offs1によって補正されたメイントルク信号(Vtm)によってアシスト制御が行われる(ステップS35)。
なお、以上の処理はあくまでも応急的な処理であるので、暫定的なアシスト制御に切り換えた後に、トルクセンサ系に異常が発生したことを運転者に報知する(ステップS36)。例えばアラームを鳴らすかランプを点滅させるような措置を採る。
10 トルクセンサ
12 車速センサ
20 モータ
30 制御装置
32 操舵補助指令値演算器
37 モータ駆動回路
38 モータ電流検出回路
41 異常診断手段
42 切換部
43 記憶部
44 補正手段
SW1 スイッチ開放信号
SW2 スイッチ動作チェック信号
12 車速センサ
20 モータ
30 制御装置
32 操舵補助指令値演算器
37 モータ駆動回路
38 モータ電流検出回路
41 異常診断手段
42 切換部
43 記憶部
44 補正手段
SW1 スイッチ開放信号
SW2 スイッチ動作チェック信号
Claims (4)
- ステアリングに印加された操舵トルクに応じて二つのトルク信号を出力可能なトルクセンサと、
ステアリング機構に操舵補助力を与えるモータと、
前記二つのトルク信号のうちの選択されたトルク信号に基づいて操舵補助指令値を算出する操舵補助指令値演算器、前記操舵補助指令値と前記モータの電流検出値とから演算される電流指令値に基づいて前記モータを駆動するモータ駆動回路、及び前記操舵補助指令値演算器に入力される前記トルク信号を切り換える切換部を備えた制御装置と、
を備えた電動パワーステアリング装置において、
前記トルクセンサはトルク変化を電気信号として検出するブリッジ回路の各アームに流れる電流を遮断する第1のスイッチング手段を備え、
前記制御装置は、さらに、
前記二つのトルク信号の差を監視し、その差が所定の閾値を超える期間が所定時間継続した場合に前記第1のスイッチング手段を開放させる信号を前記トルクセンサに送って開放させ、そのときの前記トルクセンサから出力される前記トルク信号を前記各トルク信号の各オフセット値とし、該オフセット値どうしを比較して大きくない方のオフセット値を持つトルク信号が前記操舵補助指令値に入力されるように前記切換部を切り換えるとともに、前記第1のスイッチング手段を導通させるように制御する異常診断手段を備えたことを特徴とする電動パワーステアリング装置。
- ステアリングに印加された操舵トルクに応じて二つのトルク信号を出力可能なトルクセンサと、
ステアリング機構に操舵補助力を与えるモータと、
前記二つのトルク信号のうちの選択されたトルク信号に基づいて操舵補助指令値を算出する操舵補助指令値演算器、前記操舵補助指令値と前記モータの電流検出値とから演算される電流指令値に基づいて前記モータを駆動するモータ駆動回路、及び前記操舵補助指令値演算器に入力される前記トルク信号を切り換える切換部を備えた制御装置と、
を備えた電動パワーステアリング装置において、
前記トルクセンサはトルク変化を電気信号として検出するブリッジ回路の各アームに流れる電流を遮断する第1のスイッチング手段を備え、
前記制御装置は、さらに、
前記二つのトルク信号の差を監視し、その差が所定の閾値を超える期間が所定時間継続した場合に前記第1のスイッチング手段を開放させる信号を前記トルクセンサに送って開放させ、そのときの前記トルクセンサから出力される前記トルク信号を前記各トルク信号の各オフセット値とし、該オフセット値のうちの予め選択した一方のオフセット値を補正値として出力するとともに、前記第1のスイッチング手段を導通させるように制御する異常診断手段と、
前記切換部と前記操舵補助指令値演算器との間に配置され、前記異常診断手段から出力されたオフセット値によって前記トルク信号を補正する補正手段と、
を備えたことを特徴とする電動パワーステアリング装置。
- 前記第1のスイッチング手段が開放されている間は、前記第1のスイッチング手段が開放される直前の前記操舵補助指令値演算器に入力されていたトルク信号の記憶値に基づいてアシスト制御を行うことを特徴とする請求項1または請求項2に記載の電動パワーステアリング装置。
- 前記ブリッジ回路のいずれか一方のアームの所定のインピーダンス素子を短絡させる第2のスイッチング手段を備え、前記各アームに流れる電流を遮断する第1のスイッチング手段が正常に導通状態に復帰することを第2スイッチング手段を短絡させることによって確認することを特徴とする請求項1または2に記載の電動パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007261559A JP2009090747A (ja) | 2007-10-05 | 2007-10-05 | 電動パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007261559A JP2009090747A (ja) | 2007-10-05 | 2007-10-05 | 電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009090747A true JP2009090747A (ja) | 2009-04-30 |
Family
ID=40663175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007261559A Pending JP2009090747A (ja) | 2007-10-05 | 2007-10-05 | 電動パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009090747A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014534922A (ja) * | 2011-09-14 | 2014-12-25 | ツェットエフ、レンクジステメ、ゲゼルシャフト、ミット、ベシュレンクテル、ハフツングZf Lenksysteme Gmbh | 電動パワーステアリングシステムを作動させるための方法 |
| JP2017100547A (ja) * | 2015-12-01 | 2017-06-08 | 日本精工株式会社 | モータ制御装置及びこれを備えた電動パワーステアリング装置 |
-
2007
- 2007-10-05 JP JP2007261559A patent/JP2009090747A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014534922A (ja) * | 2011-09-14 | 2014-12-25 | ツェットエフ、レンクジステメ、ゲゼルシャフト、ミット、ベシュレンクテル、ハフツングZf Lenksysteme Gmbh | 電動パワーステアリングシステムを作動させるための方法 |
| JP2017100547A (ja) * | 2015-12-01 | 2017-06-08 | 日本精工株式会社 | モータ制御装置及びこれを備えた電動パワーステアリング装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4639483B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP5664447B2 (ja) | 電動パワーステアリング装置 | |
| WO2013077241A1 (ja) | 電動パワーステアリング装置 | |
| US7202621B2 (en) | Power steering control device for monitoring reference voltage | |
| JP5136283B2 (ja) | 電動パワーステアリング装置 | |
| JP2009012511A (ja) | 電動パワーステアリング装置 | |
| US7002313B2 (en) | Electric power steering device control apparatus | |
| JP5082846B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP3663880B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4016976B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2010184669A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2009090749A (ja) | 電動パワーステアリング装置 | |
| JP3938472B2 (ja) | 電動パワーステアリング装置 | |
| JP2009090747A (ja) | 電動パワーステアリング装置 | |
| JP4474662B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP2009067222A (ja) | 電動パワーステアリング装置 | |
| JP4539923B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4506784B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4742797B2 (ja) | モータ駆動制御装置及びそれを用いた電動パワーステアリング装置の制御装置 | |
| JP5256780B2 (ja) | 電動パワーステアリング装置 | |
| JP2009137514A (ja) | 電動パワーステアリング装置 | |
| JPH10197367A (ja) | 電動パワーステアリング装置の制御装置 | |
| JP4853043B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP5266913B2 (ja) | 電動パワーステアリング装置の制御装置 | |
| JP5181540B2 (ja) | 電動パワーステアリング装置 |