JP2009241902A - 船舶の風圧抵抗低減方法及び船舶 - Google Patents
船舶の風圧抵抗低減方法及び船舶 Download PDFInfo
- Publication number
- JP2009241902A JP2009241902A JP2008094148A JP2008094148A JP2009241902A JP 2009241902 A JP2009241902 A JP 2009241902A JP 2008094148 A JP2008094148 A JP 2008094148A JP 2008094148 A JP2008094148 A JP 2008094148A JP 2009241902 A JP2009241902 A JP 2009241902A
- Authority
- JP
- Japan
- Prior art keywords
- ship
- bridge
- monitoring device
- camera
- monitoring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Traffic Control Systems (AREA)
Abstract
【課題】監視装置で船首前方又は舷側の視界を確保しつつ、空気抵抗を減少して推進効率を向上できると共に、船橋及び居住区構造物における振動を軽減し易く、これらの構造物の重量を減少できて軽量化を図れる船舶の風圧抵抗低減方法及び船舶を提供する。
【解決手段】水上のみを航行する船舶1において、監視装置8を設けて、このデータを操舵室3a内に表示して、操舵室3a内で船体の周囲を監視できるように構成すると共に、操舵室3aの高さを、操舵室内の監視位置Paより前方の水面を見通すことが出来ない距離Smが、基準距離S0よりも大きくなる高さに形成するか、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、船橋ウイングを設けないようにするかの少なくとも一つを行って、船橋3及び居住区7の構造物の風圧抵抗を減少する。
【選択図】図1
【解決手段】水上のみを航行する船舶1において、監視装置8を設けて、このデータを操舵室3a内に表示して、操舵室3a内で船体の周囲を監視できるように構成すると共に、操舵室3aの高さを、操舵室内の監視位置Paより前方の水面を見通すことが出来ない距離Smが、基準距離S0よりも大きくなる高さに形成するか、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、船橋ウイングを設けないようにするかの少なくとも一つを行って、船橋3及び居住区7の構造物の風圧抵抗を減少する。
【選択図】図1
Description
本発明は、船橋及び居住区構造物を小さくして、空気抵抗の低減による推進効率の向上と船橋及び居住区構造物の軽量化と船橋及び居住区構造物における振動を軽減し易くすることができる船舶に関する。
船舶においては、他船や漂流物との衝突を避けるために、レーダーや航行機器の情報を利用すると共に、水上を航行中は船の前方を、乗組員が肉眼で必要に応じて双眼鏡を使用して監視している。この衝突回避のためには、レーダー監視も重要であるが、小船や漂流物等はレーダー電波の反射が小さいので、目視による監視が不可欠である。
しかしながら、肉眼で船首前方を監視しようとすると、船橋の一部で乗組員が操船を行っている操舵室より前方の、上甲板上の貨物や船首部船体自身等の障害物による視界の遮りを少なくする必要があり、SOLAS(海上における人命の安全のための国際条約)においても、航海中の操舵を指揮する場所(監視位置)での視界について、船舶の喫水、トリム及び貨物のあらゆる状態によらず、船首方向から両舷方向に各10度の範囲において、船舶の長さの2倍あるいは500mのいずれか短い方より遠くが不明瞭であってはならない、と定められている。また、同様な規定は日本海事協会(NK)の鋼船規則にも設けられている。
そのため、通常はその最上層に船橋が配置されている、居住区構造物を、船体の前後方向の前の方に配置したり、居住区構造物を高くして船橋甲板の高さを高くする必要がある。そのため、冷凍貨物船ではあるが、船体の前後方向の中央に冷蔵船倉を設けて、この上に航海ブリッジと乗組員用の居住区域を設けた搬送船も提案されている(例えば、特許文献1参照。)。
また、従来技術においては、通常は、図7〜図9に示すように、操舵室3aX、3aY内の監視位置の視点(監視点)Paにおける肉眼による船首前方監視で、監視位置より前方の船首部船体自身や上甲板上の貨物等の障害物により前方の水面を見通すことが出来ない距離SmX、SmYが、SOLASに既定された許容値(基準距離)S0を越えないようにするために、操舵室3aX、3aYの監視位置Paの高さH1X、H1Yは、この許容値S0の先端の点Pc(水面との交点)と監視位置Paとを結ぶ前方見通し線Lx、Lyが、監視位置Paより前方の船首部船体自身等の障害物Pbや上甲板上の球型タンクやコンテナ等の貨物等の障害物Pbより上を通るように配置している。
また、従来技術においては、図8に示すように、離着桟時の操船等で船舶1Xの船側6を監視するために、肉眼による目視で船側6を見られるように、船舶1Xの舷側6まで船橋3Xの一部である船橋ウイング3bを操舵室の両側に張り出している。つまり、船橋ウイング3bを含めた船橋1Xの幅Bbは船舶1Xの幅Bまで達している。
一方、船舶前方監視装置や船舶前方監視システムも進歩しており、例えば、テレビカメラで撮影した船舶の前方の状況を船舶運転場所(船橋、操船室)あるいは監視場所、又は、船舶運転場所と監視場所の両方に設置したモニターに画像として表示すると共に、窓付きの筐体に入れたテレビカメラを、傾斜角度検知手段とカメラ台の傾斜角度調整手段とを用いて、所定の設定角度を保持する制御を行う船舶前方監視システムも提案されている(例えば、特許文献2参照。)。
この船舶前方監視システムでは、テレビカメラの設置場所として、フォアマスト(前部マスト)上を例示し、このマスト上では船体運動の影響を受けるので、テレビカメラの映像が船体運動の影響を受けて画像が揺れないように、テレビ台を制御することによってテレビカメラの揺れを防止している。
特表2001−524422号公報
特開2007−22349号公報
本発明は、上記の状況を鑑みてなされたものであり、その目的は、監視装置で船首前方又は舷側の視界を確保しつつ、船橋の高さを低くしたり、船橋ウイングの船体幅方向長さを減少したり、船橋ウイングを設けないことにより、空気抵抗(風圧抵抗)を減少して推進効率を向上できると共に、船橋及び居住区構造物における振動を軽減し易くなり、また、船橋及び居住区構造物の重量を減少できて軽量化を図ることができる船舶の風圧抵抗低減方法及び船舶を提供することにある。
上記の目的を達成するための船舶の風圧抵抗低減方法は、水上のみを航行する船舶において、監視装置を設けて、この監視装置のデータを操舵室内に表示して、操舵室内で船体の周囲を監視できるように構成すると共に、操舵室の高さを、操舵室内の監視位置より前方の障害物によって前方の水面を見通すことが出来ない距離が、500mまたは船長の2倍のうち小さい方である基準距離よりも大きくなる高さに形成するか、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、船橋ウイングを設けないようにするかの少なくとも一つを行うことにより、船橋及び居住区構造物の風圧抵抗を減少する方法である。
この船舶の風圧抵抗低減方法により、空気抵抗(風圧抵抗)を減少して推進効率を向上できると共に、船橋及び居住区構造物における振動を軽減し易くなり、また、船橋及び居住区構造物の重量を減少できて軽量化を図ることができる。
また、上記の目的を達成するための本発明の船舶は、船首部又はマストに前方監視装置を設けて、この前方監視装置のデータを操舵室内に表示して、操舵室内で船首前方を監視できるように構成すると共に、操舵室の高さを、操舵室内の監視位置より前方の障害物によって前方の水面を見通すことが出来ない距離が、500mまたは船長の2倍のうち小さい方である基準距離よりも大きくなるようにして構成する。
この構成によれば、テレビカメラ等の前方監視装置により、船首部における前方の視界を前方監視装置で撮影し、この撮影画像等のデータを操舵室内で監視できるので、操舵室から肉眼で船首部前方を監視できる必要がなくなる。従って、操舵室の高さを肉眼で目視して監視できる高さにする必要が無くなる。
そのため、前方監視装置の設置により視界を確保しつつ、操舵室内の高さを、操舵室内の監視位置より前方の障害物によって前方の水面を見通すことが出来ない距離が、500mまたは船長の2倍のうち小さい方である基準距離よりも大きくなるようして、従来技術よりも操舵室を低くする。この500m又は船長の2倍は、SOLAS(海上における人命の安全のための国際条約)の規定から決まる数値である。
これにより、航行中や停泊時の風圧抵抗を小さくすることができ、推進抵抗が減少する。その結果、推進効率を向上することができる。また、船橋が低くなって居住区構造物が小さくなると構造強度の面で有利になると共に、振動を軽減し易くなる。また、居住区構造物自体を小さくできるので、船舶の軽量化を図ることができる。
上記の船舶においては、船尾に船橋を設けた場合には、船舶の前方を肉眼で目視するために、船橋を船首部や船体中央部に設ける場合に比べて、より高く船橋を設ける必要があるので、船橋を低くすることによる利点がより大きくなる。
上記の船舶において、前記前方監視装置として、広角カメラと望遠カメラの組み合わせを用い、この広角カメラの映像と望遠カメラの映像を同時表示可能とすることにより、目視による以上の監視効果を奏することができるようになる。また、これらのカメラの映像は航海にとって必須のものとなるので、1組ではなく、複数組を設けて故障に対する冗長性を持たせる。また、普通の目視可能な光線の範囲以外の例えば赤外線カメラ等も用いることにより、より監視能力を高めることができる。
上記の船舶において、船舶の側方監視用装置を設け、この側方監視用装置のデータを操舵室内に表示して、操舵室内で船舶の側方を監視できるように構成すると共に、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、又は、船橋ウイングを設けないように構成する。この船橋ウイングに関しては、日本海事協会鋼船規則の定義では、船橋の一部で操舵室(これも船橋の一部)の両側に船側まで拡張された部分であるが、ここでは、船橋の一部で操舵室(これも船橋の一部)の両側に拡張された部分とし、船側まで拡張されないものも含めることにする。
この構成によれば、テレビカメラ等の側方監視装置により、側方の視界を側方監視装置で撮影し、この撮影画像等のデータを操舵室内で監視できるので、操舵室から肉眼で船舶の側方を監視できる必要がなくなり、船橋の幅を肉眼で目視して監視できる幅にする必要が無くなる。従って、側方監視用のカメラの設置により視界を確保しつつ、船橋の幅を狭くすることができ、これにより、航行中や停泊時の風圧抵抗を更に小さくすることができ、推進抵抗が更に減少するので、推進効率を更に向上することができる。また、船橋の幅が狭くなり、船橋及び居住区構造物が小さくなると構造強度の面に有利になると共に、振動を軽減し易くなる。また、船橋及び居住区構造物自体を小さくできるので、船舶の更なる軽量化を図ることができる。
また、本発明は、必要な居住区画や船橋に必要な広さを容易に確保でき、前方見通しのために操舵室の位置を高くしている船舶に適用することで効果を上げられるので、大きさとしては、排水量が30,000トン以上の船舶や垂線間長(Lpp)が150m以上の船舶を対象とする場合に効果が大きく、船種としては、タンカー、コンテナ船、鉱石運搬船、バルク運搬船、LNG運搬船等を対象とする場合に効果が大きい。
本発明の船舶の風圧抵抗低減方法及び船舶によれば、船首前方監視装置で船首前方の視界を確保しつつ、操舵室を低く構成するので、または、船舶の側方監視用装置で、操舵室内で船舶の側方の視界を確保しつつ、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、又は、船橋ウイングを設けないように構成するので、空気抵抗の低減による推進効率の向上、船橋及び居住区構造物における振動の軽減の容易化、軽量化を図ることができる。
以下、図面を参照して本発明に係る船舶の風圧抵抗低減方法及び船舶の実施の形態について説明する。ここでは、船尾に船橋がある船舶を例にして示すが、本発明は、必ずしも船橋が船尾にある船舶のみに限定されない。
図1及び図2に示すように、この第1の実施の形態の船舶1は、水上のみを航行する船舶であって、船尾側の上甲板2上に居住区7及び船橋(ブリッジ)3を備えて構成される。この船尾側に船橋3を設けた場合には、船舶1の前方を目視で見渡すために、従来技術の船舶では、操舵室3aを船首部や船体中央部に設ける場合に比べて、より高く操舵室3aを設ける必要があるので、操舵室3aを低くすることによるメリットがより大きくなる。なお、この船橋3は、通常、乗組員の居住区画7の上部に設けられるが、船橋3を居住区の下の方の層、例えば、上甲板上に配置することも考えられる。
この船舶1の前部マスト5aに前方監視用カメラ(前方監視装置)8を設ける。この前方監視用カメラ8の映像は操舵室3a内に設けた画面表示装置に表示して、操舵室3a内に居る乗組員が船首前方を監視できるように構成する。
この前方監視用カメラ8としては、広角カメラと望遠カメラの組み合わせを用い、この広角カメラの映像と望遠カメラの映像とを同時表示可能とすることにより、目視による以上の監視効果を得る。また、故障に対する冗長性を持たせて、1組ではなく、複数組を設ける。また、普通の目視可能な光線の範囲以外の例えば赤外線カメラ等も用いることにより、より監視能力を高めることが好ましい。これらの構成により、航海中に前方監視用カメラ8の映像が見られなくなることを防止する。
この前方監視用カメラ8は、ロール(横揺れ)やピッチ(縦ゆれ)等の船体運動の影響を受けるので、前方監視用カメラ8の映像がこれらの船体運動の影響を受けないようにしないと、この表示画像が揺れてしまうので、ジンバル構造やカメラの台座の姿勢制御、あるいは、画像処理によって、前方監視用カメラ8の表示画像の揺れを防止する。
この前方監視用カメラ8の配置場所としては、図1及び図2では前部マスト5aに設けたが、これ以外でもよく、例えば、船橋3の上に設けられることの多い後部マスト5bが考えられる。これらの前部マスト5aと後部マスト5bは前部マスト灯や後部マスト灯を配置するために必ず設けられるので、前方監視用カメラ8の配置に都合がよい。また、前部マスト5aや後部マスト5bのように配置位置が高いと船首部4への海水打ち込みに対して安全な場所となる。また、前方見通しの視界の大きさや良好性もよい。しかしながら、船体動揺の影響が大きくなるので、視界の映像が揺れないようにする対策が特に重要となる。
また、前方見通しの視界の大きさや良好性から考えると、船首部4の上甲板2上に、耐水、耐波浪のカメラ室乃至カメラ箱を設けて配置することの考えられる。この場合は、カメラ8の海水打ち込みに対する対策が必要であるが、最近は、監視用カメラ8の大きさが小さくなっているので、保守点検を考慮しても、比較的小さな構造物で済む。また、この場合は、船首部4の直下もカメラ8の視界に入れることができる。
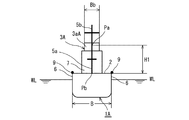
そして、第1の実施の形態の船舶1では、監視用カメラ8の設置と共に、操舵室3aの高さH1を、操舵室3a内の監視位置(監視点)Paより前方の上甲板上の球型タンクやコンテナ等の貨物や船首部船体自身等の障害物によって前方の水面を見通すことが出来ない最大距離、言い換えれば見通し出来る最短距離Smが、500mまたは船長(全長Loa)の2倍のうち小さいほうの距離(基準距離)S0よりも大きくなるようして構成される。この監視位置Paに関しては、日本海事協会鋼船規則検査要領と同様に、監視位置Paの高さH1は、船橋甲板よりも1800mm高い点とし、前後位置については船橋3の前面壁から750mm後方とする。
これにより、この船橋3は図7及び図8に示すような従来技術の船舶1Xの操舵室3aXに比べて、低くなる。この操舵室3aの高さH1は、乗組員の人数に応じた居住区域を確保し、更に、操船に必要な機器類を装備できる容積の操舵室3aを確保することと、風圧抵抗等を考慮して決定される。なお、この第1の実施の形態の船舶1では、図2に示すように、船橋3の幅Bbは船側6を肉眼で目視できるように船の幅B以上とする。
この第1の実施の形態の船舶1では、前方見通し最短距離Smは、従来技術の場合の前方見通し最短距離SmXよりも大きくなる。しかしながら、前方監視用カメラ8と船首部4の上甲板2の最前端Pbとを結んだ基準線(カメラ視界用基準線)L2と喫水線WLの水面との交点Qcは、見通し最短距離Smの先端Pcよりも後方となり、この交点Qcと船首部4の最先端Pbとの距離(前方監視用カメラ8からの見通し可能な最短距離)Scは前方見通し最短距離Smよりも小さくなる。つまり、より船首部4に近い範囲までを監視できるようになる。なお、コンテナ等の貨物を上甲板上に搭載する船舶では、前方の視界を遮る障害物は船首部4の最先端Pbではなく、搭載したコンテナ等の貨物となる場合もある。
この第1の実施の形態の船舶1によれば、操舵室3aの高さH1を従来技術の高さH1X、H1Yよりも低く形成しても、前方監視用カメラ8により、船首部4より前方の視界をより船首に近い範囲Scまで前方監視用カメラ8で撮影し、この撮影画像を操舵室3a内で監視できるので、操舵室3aから肉眼による目視で船首部前方を監視できなくても、前方監視用カメラ8の映像により船首部前方を十分に確認でき、安全に航行することができる。
この船舶1によれば、船橋3の高さH1を低く形成したので、風圧面積を減少させることができ、航行中や停泊時の風圧抵抗(空気抵抗)を小さくすることができる。その結果、推進抵抗を減少でき、推進効率を向上できる。
また、背の高い構造物は十分な補強をしなければ固有振動数が低くなるため、プロペラの回転数と主機(メインエンジン)の振動数によっては共振する可能性があるが、構造物を小さくすることでも、共振を回避することができるので、船橋3及び居住区7の構造物が小さくなると構造強度の面で有利になると共に、設計の自由度が増して振動を軽減し易くなる。また、軽量化に関しては、船橋3及び居住区7は総じて小さい構造物となるので、重量も小さくでき、船舶1の軽量化を図ることができる。
また、船尾に船橋3を設けた場合には、船舶1の前方を目視で見渡すために、従来技術の船舶では、船橋3を船首部や船体中央部に設ける場合に比べて、より高く船橋3を設ける必要があるので、本発明の船橋3を低くすることによるメリットがより大きくなる。
次に、第2の実施の形態について説明する。図3及び図4に示すように、この第2の実施の形態の船舶1Aは、船舶1Aの側方監視用カメラ9を設け、この側方監視用カメラ9の映像を操舵室3aA内に表示して、操舵室3aA内で船舶1Aの船側6も監視できるように構成する。
それと共に、図4に示すように船橋ウイング3bを設けない構成とする。あるいは、船橋ウイング3bを設けても、船橋ウイング3bの船体幅方向の張り出し長さを船側にまで至らないように構成する。つまり、船橋1Aの幅Bbを船舶1Aの幅Bよりも狭く、例えば、船橋ウイング3bAの幅を操舵室3aAの端から船舶1Aの端までの幅の0.0倍〜0.7倍にして形成する。0.7倍よりも広くすると、船橋3Aの幅Bbを狭くして得られる利点が少なくなる。
この側方監視用カメラ9の位置としては、主に離着桟の時に船側6の部分とその近傍が視界に入ればよいので、船側6の部分に設けることができる。この側方監視用カメラ9は、上甲板2の船側6側に、耐水、耐波浪のカメラ室乃至カメラ箱を設けて配置する。これにより、保守点検が容易になる。また、この側方監視用カメラ9の収納部は最近はカメラの大きさが小さくなっているので比較的小さな構造物で済む。
この側方監視用カメラ9も、ロール(横揺れ)やピッチ(縦ゆれ)等の船体運動の影響を受けるので、側方監視用カメラ9の映像がこれらの船体運動の影響を受けないようにしないと、この画像が揺れてしまうので、ジンバル構造やカメラの台座の姿勢制御、あるいは、画像処理によって、側方監視用カメラ9の画像の揺れを防止する。
また、この側方監視用カメラ9も、第1の実施の形態の船舶1の前方監視用カメラ8と同様に、広角カメラと望遠カメラの組み合わせを用い、この広角カメラの映像と望遠カメラの映像とを同時表示可能とすることにより、目視による以上の監視効果を得る。また、故障に対する冗長性を持たせて、1組ではなく、複数組を設ける。また、普通の目視可能な光線の範囲以外の例えば赤外線カメラ等も用いることにより、より監視能力を高めることが好ましい。これらの構成により、離着桟の操船中にカメラ9の映像が見られなくなることを防止する。
この第2の実施の形態の船舶1Aによれば、図4に示すように船橋ウイング3bを設けない。あるいは、船橋ウイング3bを設けても、船橋ウイング3bの船体幅方向の張り出し長さを船側6にまで至らないように形成しても、側方監視用のカメラ9により、船舶1Aの側方の視界を監視用カメラ9で撮影し、この撮影画像を操舵室3aA内で監視できる。従って、操舵室3aAから肉眼による目視で船舶1Aの側方を監視できなくても、側方監視用のカメラ9の映像により船舶1Aの側方を確認しつつ、桟橋での離着作業や、狭い航路の航行をすることができる。
この船舶1Aによれば、船橋3Aの幅Bbを狭く形成したので、航行中や停泊時の風圧抵抗を低減することができ、推進抵抗を減少することができるので、推進効率を更に向上することができる。また、船橋3Aの幅Bbが狭くなり、船橋3A及び居住区7の構造物が小さくなると強度的に有利になると共に、振動を更に軽減し易くなる。また、船橋3Aの構造物自体を小さくできるので、船舶1Aの軽量化を更に図ることができる。
次に、第3の実施の形態について説明する。図5及び図6に示すように、この第3の実施の形態の船舶1Bは、第1の実施の形態の船舶1の構成に加えて、第2の船舶1Aの構成を加えたものであり、前方監視用カメラ8と側方監視用カメラ9を設け、この前方監視用カメラ8と側方監視用カメラ9の映像を操舵室3aB内に表示して、操舵室3aB内で船舶1Bの船首先方と船側6も監視できるように構成する。
それと共に、操舵室3aBの高さH1を、操舵室3aB内の監視位置より前方の上甲板上の貨物や船首部船体自身等の障害物によって前方の水面を見通すことが出来ない最短距離Smが、500mまたは船長(全長Loa)の2倍のうち小さいほうの距離(基準距離)S0よりも大きくなるようして構成される。
また、更に、船橋ウイング3bを設けない構成とする。あるいは、図6に示すように、船橋ウイング3bを設けても、船橋ウイング3bの船体幅方向の張り出し長さを船側6にまで至らないように構成する。つまり、船橋1Bの幅Bbを船舶1Bの幅Bよりも狭く、例えば、船橋ウイング3bAの幅を操舵室3aAの端から船舶1Aの端までの幅の0.0倍〜0.7倍にして形成する。
この第3の実施の形態の船舶1Bによれば、第1の実施の形態の船舶1と第2の実施の形態の船舶1Aの両方の効果を奏することができる。
従って、上記の船舶の風圧抵抗低減方法及び第1〜第3の形態の船舶1、1A、1Bによれば、船首前方監視装置8で船首前方の視界を確保しつつ、操舵室3a、3aBを低く構成するので、または、船舶1A、1Bの側方監視用装置8で、操舵室3aA、3aB内で船舶1A、1Bの側方の視界を確保しつつ、船橋ウイング3bの船体幅方向の張り出し長さを船側6にまで至らないようにするか、又は、船橋ウイング3bを設けないように構成するので、空気抵抗の低減による推進効率の向上、船橋3、3A、3B及び居住区7の構造物における振動の軽減の容易化、軽量化を図ることができる。
1、1A、1B、1X、1Y 船舶
2 上甲板
3、3A、3B、3X、3Y 船橋(ブリッジ)
3a、3aA、3aB、3aX、3aY 操舵室
3b、3bB、3bX 船橋ウイング
4 船首部
5a 前部マスト
5b 後部マスト
6 船側
7 居住区画
8 前方監視用カメラ
9 側方監視用カメラ
B 船舶の幅
Bb 船橋の幅
H1 船橋の高さ
H1X、H1Y 船橋の高さ(従来技術)
L1、Lx、LY 見通し線(船橋視界用基準線)
L2 基準線(カメラ視界用基準線)
Pa 監視位置(監視点)
Pb 上甲板の先端部(又は貨物の先端)
Pc 見通しと水面との交点
Qc カメラ視界用基準線と満載喫水線の水面との交点
S0 基準距離
Sm、SmX、SmY 前方見通し最短距離
Sc 前方監視用カメラからの見通し可能な最短距離
2 上甲板
3、3A、3B、3X、3Y 船橋(ブリッジ)
3a、3aA、3aB、3aX、3aY 操舵室
3b、3bB、3bX 船橋ウイング
4 船首部
5a 前部マスト
5b 後部マスト
6 船側
7 居住区画
8 前方監視用カメラ
9 側方監視用カメラ
B 船舶の幅
Bb 船橋の幅
H1 船橋の高さ
H1X、H1Y 船橋の高さ(従来技術)
L1、Lx、LY 見通し線(船橋視界用基準線)
L2 基準線(カメラ視界用基準線)
Pa 監視位置(監視点)
Pb 上甲板の先端部(又は貨物の先端)
Pc 見通しと水面との交点
Qc カメラ視界用基準線と満載喫水線の水面との交点
S0 基準距離
Sm、SmX、SmY 前方見通し最短距離
Sc 前方監視用カメラからの見通し可能な最短距離
Claims (6)
- 水上のみを航行する船舶において、監視装置を設けて、この監視装置のデータを操舵室内に表示して、操舵室内で船体の周囲を監視できるように構成すると共に、操舵室の高さを、操舵室内の監視位置より前方の障害物によって前方の水面を見通すことが出来ない距離が、500mまたは船長の2倍のうち小さい方である基準距離よりも大きくなる高さに形成するか、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、船橋ウイングを設けないようにするかの少なくとも一つを行うことにより、船橋及び居住区構造物の風圧抵抗を減少することを特徴とした船舶の風圧抵抗低減方法。
- 船首部又はマストに前方監視装置を設けて、この前方監視装置のデータを操舵室内に表示して、操舵室内で船首前方を監視できるように構成すると共に、操舵室の高さを、操舵室内の監視位置より前方の障害物によって前方の水面を見通すことが出来ない距離が、500mまたは船長の2倍のうち小さい方である基準距離よりも大きくなるようしたことを特徴とする船舶。
- 船尾に船橋を設けたことを特徴とする請求項2に記載の船舶。
- 前記前方監視装置として、広角カメラと望遠カメラの組み合わせを用い、この広角カメラの映像と望遠カメラの映像を同時表示可能としたことを特徴とする請求項2又は3に記載の船舶。
- 船舶の側方監視用装置を設け、この側方監視用装置のデータを操舵室内に表示して、操舵室内で船舶の側方を監視できるように構成すると共に、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、又は、船橋ウイングを設けないことを特徴とする請求項2、3、又は、4に記載の船舶。
- 船舶の側方監視用装置を設け、この側方監視用装置のデータを操舵室内に表示して、操舵室内で船舶の側方を監視できるように構成すると共に、船橋ウイングの船体幅方向の張り出し長さを船側にまで至らないようにするか、又は、船橋ウイングを設けないことを特徴とする船舶。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008094148A JP2009241902A (ja) | 2008-03-31 | 2008-03-31 | 船舶の風圧抵抗低減方法及び船舶 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008094148A JP2009241902A (ja) | 2008-03-31 | 2008-03-31 | 船舶の風圧抵抗低減方法及び船舶 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009241902A true JP2009241902A (ja) | 2009-10-22 |
Family
ID=41304302
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008094148A Pending JP2009241902A (ja) | 2008-03-31 | 2008-03-31 | 船舶の風圧抵抗低減方法及び船舶 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009241902A (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013223028A (ja) * | 2012-04-13 | 2013-10-28 | National Maritime Research Institute | 全方位画像取得装置および画像情報提供システム |
| JP2015044449A (ja) * | 2013-08-27 | 2015-03-12 | 株式会社新来島どっく | 自動車運搬船の操舵室構造 |
| JP2016097925A (ja) * | 2014-11-26 | 2016-05-30 | 国立研究開発法人 海上・港湾・航空技術研究所 | 操船支援システム及びそのシステムを搭載した船舶 |
| WO2017167902A1 (en) * | 2016-03-31 | 2017-10-05 | A.P. Møller - Mærsk A/S | Container ship |
| JP2019055692A (ja) * | 2017-09-21 | 2019-04-11 | 三井E&S造船株式会社 | 液化ガス運搬船 |
| CN110491172A (zh) * | 2019-08-22 | 2019-11-22 | 安徽省交通勘察设计院有限公司 | 一种桥梁桥洞碰撞预警方法及系统 |
| JP2020152180A (ja) * | 2019-03-19 | 2020-09-24 | ヤマハ発動機株式会社 | 船舶および船舶用撮像装置 |
| CN113077660A (zh) * | 2021-04-15 | 2021-07-06 | 上海海事大学 | 应用于内河船舶的智慧桥梁避碰系统 |
| CN113443075A (zh) * | 2021-07-21 | 2021-09-28 | 上海外高桥造船有限公司 | 一种双燃料散货船 |
| CN114241812A (zh) * | 2021-12-07 | 2022-03-25 | 浙江省交通运输科学研究院 | 一种内河桥梁分级预警系统 |
| WO2022176512A1 (ja) * | 2021-02-22 | 2022-08-25 | 古野電気株式会社 | レーダ信号処理装置、レーダ装置、レーダ信号処理方法およびレーダ信号処理プログラム |
| WO2023286359A1 (ja) * | 2021-07-12 | 2023-01-19 | 古野電気株式会社 | 着桟支援装置、着桟支援方法、及びプログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS588486A (ja) * | 1981-07-09 | 1983-01-18 | Nippon Hakuyo Kiki Kaihatsu Kyokai | 船舶のブリツジ構造 |
| JPH0431098U (ja) * | 1990-07-09 | 1992-03-12 | ||
| JP2002225790A (ja) * | 2001-01-30 | 2002-08-14 | Furuno Electric Co Ltd | 遠視装置 |
| JP2003276677A (ja) * | 2002-03-27 | 2003-10-02 | Mitsui Eng & Shipbuild Co Ltd | 船舶の離着桟支援装置 |
| JP2007022349A (ja) * | 2005-07-19 | 2007-02-01 | Shipbuilding Research Centre Of Japan | 船舶前方監視システム |
-
2008
- 2008-03-31 JP JP2008094148A patent/JP2009241902A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS588486A (ja) * | 1981-07-09 | 1983-01-18 | Nippon Hakuyo Kiki Kaihatsu Kyokai | 船舶のブリツジ構造 |
| JPH0431098U (ja) * | 1990-07-09 | 1992-03-12 | ||
| JP2002225790A (ja) * | 2001-01-30 | 2002-08-14 | Furuno Electric Co Ltd | 遠視装置 |
| JP2003276677A (ja) * | 2002-03-27 | 2003-10-02 | Mitsui Eng & Shipbuild Co Ltd | 船舶の離着桟支援装置 |
| JP2007022349A (ja) * | 2005-07-19 | 2007-02-01 | Shipbuilding Research Centre Of Japan | 船舶前方監視システム |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013223028A (ja) * | 2012-04-13 | 2013-10-28 | National Maritime Research Institute | 全方位画像取得装置および画像情報提供システム |
| JP2015044449A (ja) * | 2013-08-27 | 2015-03-12 | 株式会社新来島どっく | 自動車運搬船の操舵室構造 |
| JP2016097925A (ja) * | 2014-11-26 | 2016-05-30 | 国立研究開発法人 海上・港湾・航空技術研究所 | 操船支援システム及びそのシステムを搭載した船舶 |
| WO2017167902A1 (en) * | 2016-03-31 | 2017-10-05 | A.P. Møller - Mærsk A/S | Container ship |
| CN108883819A (zh) * | 2016-03-31 | 2018-11-23 | A.P.莫勒-马斯克公司 | 集装箱船 |
| JP2019512423A (ja) * | 2016-03-31 | 2019-05-16 | エー・ピー・モラー−マースク エー/エス | コンテナ船 |
| JP2022022323A (ja) * | 2016-03-31 | 2022-02-03 | エー・ピー・モラー-マースク エー/エス | コンテナ船 |
| JP2019055692A (ja) * | 2017-09-21 | 2019-04-11 | 三井E&S造船株式会社 | 液化ガス運搬船 |
| JP2020152180A (ja) * | 2019-03-19 | 2020-09-24 | ヤマハ発動機株式会社 | 船舶および船舶用撮像装置 |
| JP7339002B2 (ja) | 2019-03-19 | 2023-09-05 | ヤマハ発動機株式会社 | 船舶および船舶用撮像装置 |
| US11691697B2 (en) | 2019-03-19 | 2023-07-04 | Yamaha Hatsudoki Kabushiki Kaisha | Marine vessel and marine vessel imaging device |
| CN110491172A (zh) * | 2019-08-22 | 2019-11-22 | 安徽省交通勘察设计院有限公司 | 一种桥梁桥洞碰撞预警方法及系统 |
| US12461220B2 (en) | 2021-02-22 | 2025-11-04 | Furuno Electric Co., Ltd. | Radar signal processing device, radar device, radar signal processing method, and non-transitory computer-readable medium |
| WO2022176512A1 (ja) * | 2021-02-22 | 2022-08-25 | 古野電気株式会社 | レーダ信号処理装置、レーダ装置、レーダ信号処理方法およびレーダ信号処理プログラム |
| JPWO2022176512A1 (ja) * | 2021-02-22 | 2022-08-25 | ||
| JP7733720B2 (ja) | 2021-02-22 | 2025-09-03 | 古野電気株式会社 | レーダ信号処理装置、レーダ装置、レーダ信号処理方法およびレーダ信号処理プログラム |
| CN113077660A (zh) * | 2021-04-15 | 2021-07-06 | 上海海事大学 | 应用于内河船舶的智慧桥梁避碰系统 |
| WO2023286359A1 (ja) * | 2021-07-12 | 2023-01-19 | 古野電気株式会社 | 着桟支援装置、着桟支援方法、及びプログラム |
| JPWO2023286359A1 (ja) * | 2021-07-12 | 2023-01-19 | ||
| CN113443075A (zh) * | 2021-07-21 | 2021-09-28 | 上海外高桥造船有限公司 | 一种双燃料散货船 |
| CN114241812B (zh) * | 2021-12-07 | 2022-12-20 | 浙江省交通运输科学研究院 | 一种内河桥梁分级预警系统 |
| CN114241812A (zh) * | 2021-12-07 | 2022-03-25 | 浙江省交通运输科学研究院 | 一种内河桥梁分级预警系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009241902A (ja) | 船舶の風圧抵抗低減方法及び船舶 | |
| JP7386041B2 (ja) | 操船支援システム及び方法 | |
| DK179727B1 (en) | A container ship configured for stowing a plurality of shipping containers above a deck | |
| JP7232089B2 (ja) | 船舶用の表示装置、船舶および船舶用の画像表示方法 | |
| EP3688536B1 (en) | A method and system for operating a ship | |
| KR102269676B1 (ko) | 선박의 자동 충돌 예방 방법 및 장치 | |
| JP4214219B2 (ja) | 離接岸用操船支援装置 | |
| JP2016088214A (ja) | 液化ガス用浮体構造物 | |
| WO2019093416A1 (ja) | 船舶の航行支援システム | |
| US11643174B2 (en) | Small planing watercraft with imaging device | |
| EP3688535B1 (en) | A method and system for operating a ship | |
| US7230881B2 (en) | Submarine remote surface platform | |
| WO2016039126A1 (ja) | 商用船舶 | |
| US12386349B2 (en) | Automatic determination of mooring direction of boat | |
| KR20120072516A (ko) | 브릿지 윙이 없는 선박과 그 선박의 접안방법 | |
| US11059549B2 (en) | Marine vessel and marine vessel operation support device | |
| Jurdziński | Processes of a freely drifting vessel | |
| US12091141B2 (en) | System for determining automatic docking is complete by collision | |
| US12358603B2 (en) | System for detecting position of boat moored under roof | |
| US12541201B2 (en) | System for correcting effect of tidal current and wind on boat | |
| US5655472A (en) | Asymmetric bridge | |
| KR20260039535A (ko) | 선박의 공기저항 저감장치 | |
| JP2025042181A (ja) | 船舶 | |
| CN117544747A (zh) | 一种基于cctv的船舶驾驶视线补偿方法 | |
| Maheshwar | Improving Propulsion Efficiency of Ships using Retractable Bridge |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111122 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120327 |