JP2009247158A - アキシャルエアギャップ型電動機 - Google Patents
アキシャルエアギャップ型電動機 Download PDFInfo
- Publication number
- JP2009247158A JP2009247158A JP2008092289A JP2008092289A JP2009247158A JP 2009247158 A JP2009247158 A JP 2009247158A JP 2008092289 A JP2008092289 A JP 2008092289A JP 2008092289 A JP2008092289 A JP 2008092289A JP 2009247158 A JP2009247158 A JP 2009247158A
- Authority
- JP
- Japan
- Prior art keywords
- diameter side
- rotor
- magnet
- inner diameter
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
【課題】ロータマグネットの内径側における磁束の集中を抑えて、鉄損を低減したアキシャルエアギャップ型電動機を提供する。
【解決手段】ロータマグネット32のステータ2のティース面22に対向するマグネット面321の軸方向の厚さを半径方向の内側から外側に向かって漸次厚くする。
【選択図】図5
【解決手段】ロータマグネット32のステータ2のティース面22に対向するマグネット面321の軸方向の厚さを半径方向の内側から外側に向かって漸次厚くする。
【選択図】図5
Description
本発明は、ロータとステータとがロータの出力軸の軸線方向に沿って所定の空隙をもって対向的に配置されるアキシャルエアギャップ型電動機に関し、さらに詳しく言えば、1マグネット当たりマグネットとステータコアとの間の距離を変えて、磁束集中による鉄損の増加を抑制したアキシャルエアギャップ型電動機に関する。
アキシャルエアギャップ型電動機は、ステータ(固定子)の一方または両方の側面にロータ(回転子)をロータの出力軸の軸線方向に所定の空隙をもって対向的に配置した電動機であり、回転軸方向の長さを短くできるという特徴がある。
例えば特許文献1に記載されているアキシャルエアギャップ型電動機において、ステータは、内部に電磁鋼板の積層体からなるコア部材を有する複数のポールメンバーを出力軸の軸線を中心に環状に連結したものからなり、側面にはローターマグネットに対向するコア部材のティース面が露出している。
また、ロータは、円板状のロータバックヨークに複数のロータマグネットが出力軸の軸線を中心に環状に配置されている。各ロータマグネットは、内径側から外径側に向けて周方向の幅が拡がる扇状に形成されている。
特許文献1のロータマグネットは、トルクリップルおよびコギングトルクを低減する目的のために、ロータマグネットの外径側が外側に向かってさらに円弧状に張り出されている。
しかしながら、ステータコアのティース面の周方向の幅は、内径側から外径側に向かって広がる扇状に形成されているため、ロータマグネットの内径側では、ティース面の内径寄りでは幅が狭く、マグネットの磁束が集中し、これによって鉄損を伴ってしまう。
これを防止する方法の1つとして、特許文献2では、ローターマグネットの内径側の幅を、中心軸と外径側の幅方向の両端とを結んだ角度θよりも小さい角度範囲内に設けて、内径側の磁束集中を抑えているようにしている。
しかしながら、ロータマグネットの内径側の周方向の幅をさらに小さくしたとしても、その変化量は微少であるため、磁束の集中を理想的に抑えることは困難であった。
そこで、本発明は上述した課題を解決するため、ロータマグネットの内径側における磁束の集中を抑えて、鉄損を低減したアキシャルエアギャップ型電動機を提供することにある。
上述した目的を達成するため、本発明は以下に示すいくつかの特徴を備えている。請求項1に記載の発明は、ステータとロータとが上記ロータの出力軸の軸線に沿って所定の空隙をもって対向配置されているアキシャルエアギャップ型電動機において、上記ロータは、上記軸線を中心として環状に配置された複数のロータマグネットを含み、上記ロータマグネットは、上記ステータに対向するマグネット面の軸方向の厚さが半径方向の内径側から外径側に向かって漸次厚くなるように形成されていることを特徴としている。
請求項2に記載の発明は、上記請求項1において、上記ステータは、内径側と外径側とで周方向の幅が異なるボビン状のコア部材を含む複数のポールメンバーが、上記軸線を中心に環状に配置されており、上記ローターマグネットの内径側の厚みをtm,外径側の厚みをTm,上記コア部材の巻線部の内径側の周方向の幅をtk,外径側の周方向の幅をTkとしたとき、上記ローターマグネットは、
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足することを特徴としている。
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足することを特徴としている。
請求項3に記載の発明は、上記請求項1または2において、上記マグネット面は、側面視にて少なくとも一部が直線状に傾斜していることを特徴としている。
請求項4に記載の発明は、上記請求項1または2において、上記マグネット面は、側面視にて少なくとも一部が階段状に傾斜していることを特徴としている。
請求項5に記載の発明は、上記請求項1または2において、上記マグネット面は、側面視にて少なくとも一部が円弧状に傾斜していることを特徴としている。
請求項1に記載の発明によれば、ロータマグネットのステータに対向するマグネット面の軸方向の厚さが半径方向の内側から外側に向かって漸次厚くなるように形成されていることにより、ロータマグネットの軸方向の厚さが、半径方向の内側で薄くなる。したがって、コア部材の内径側での磁束を集中しないようにでき、鉄損の増加を抑制することができる。
請求項2に記載の発明によれば、ステータは、内部に内径側と外径側とで周方向の幅が異なるボビン状のコア部材を含む複数のポールメンバーが軸線を中心に環状に配置されており、ローターマグネットが
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足することにより、内径側に集中する磁束を低減させることができ、鉄損の増加を抑制することができる。
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足することにより、内径側に集中する磁束を低減させることができ、鉄損の増加を抑制することができる。
請求項3に記載の発明によれば、マグネット面は、少なくとも一部が直線状に傾斜していることにより、マグネットの加工も用意であり、内径側から外径側に向かう磁束変化もスムーズである。
請求項4に記載の発明によれば、マグネット面の少なくとも一部が階段状に傾斜していることにより、内径側の磁束密度と、外径側の磁束密度の明確に変えることができる。
請求項5に記載の発明によれば、マグネット面の一部を円弧状に形成することにより、より磁束変化をスムーズにすることができる。
図1は本発明の一実施形態に係るアキシャルエアギャップ型電動機の要部断面図であり、図2はステータの正面図であり、図3はポールメンバーとコア部材の斜視図であり、図4はロータの正面図、背面図および側面図であり、図5はロータマグネットの要部拡大側面図である。図6はロータマグネットの変形例を示す要部拡大断面図であり、図7はロータマグネットとコア部材の条件を説明する説明図であり、図8は本発明と従来の単位面積当たりの磁束密度の変化率を表したグラフである。
図1に示すように、このアキシャルエアギャップ型電動機1は、円板状に形成されたステータ2と、同ステータ2の軸方向(図1では左右方向)の両側面に所定の空隙をもって対向配置された一対のロータ3,3とを備えている。各ロータ3,3は回転駆動力を出力するロータ出力軸4に同軸的に連結されている。
ステータ2およびロータ3,3は、円筒状のハウジング10内に収納されている。この例において、ハウジング10は、インサート成形によって樹脂と一体化されたステータ2の外周面を外殻の一部として用い、ステータ2の両端に円板状の蓋部材10a,10bを取り付けることにより構成されている。
図2に示すように、ステータ2は、回転軸線を中心軸として環状に配置された複数個(この例では9個)のポールメンバー21a〜21iが含まれている。各ポールメンバー21a〜21iは、同一構成のため、この例ではポールメンバー21aを例にとって説明する。
図3(a),(b)を併せて参照して、ポールメンバー21aは、左右一対のフランジ状のティース面22,22を有するボビン状のコア部材23と、コア部材23をティース面22を残して覆うインシュレータ24とを有する。
コア部材23は、H字状に打ち抜かれた電磁鋼板を半径方向に沿って多数積層することにより形成されている。コア部材23の各ティース面22の円周方向の端縁は、隣り合うポールメンバー21a〜21iをロータマグネット32a〜32hが移動する際に磁束変化を滑らかにするため、スキュー(傾斜)が形成されていることが好ましい。
インシュレータ24は絶縁樹脂からなり、ティース面22を残してコア部材23の全体を覆い隠している。インシュレータ24は、ティース面22とほぼ同一面となるフランジ部25,25が設けられており、これによりポールメンバー21aはボビン状に形成され、ボビンに沿ってコイル26(図1参照)が巻回される。
再び図1を参照し、ステータ2の中心部には、ロータ出力軸4を軸受する軸受部27が配置されている。軸受部27は、一対のラジアルボールベアリング271,272をステータ2の両側面にそれぞれ配し、その内輪にロータ出力軸4が圧入され、外輪側は合成樹脂内に埋設されている。本発明において、軸受部27の構成は任意である。
この例において、ロータ3,3は、1つのロータ出力軸4を共有しているが、各ロータ3,3ごとにロータ出力軸を有する2出力軸タイプであってもよい。さらには、ローラ出力軸4を持たずステータ2に対して直に支持させるシャフトレス型としてもよい。また、ロータ3は、1つであってもよいし、複数であってもよい。
次に、ロータ3,3について説明するが、ロータ3,3は同一構成であるため、この例では一方のロータ3についてのみ説明する。以下において、ロータ3の正面とは、ステータ2のティース面22に対向する面をいう。
図4(a)〜(c)に示すように、ロータ3は、円板状のロータバックヨーク31と、このロータバックヨーク31に支持されるロータマグネット32とを備えており、ステータ2の軸線に同軸的に配置されている。
ロータバックヨーク31は、例えば電気亜鉛メッキ鋼板などの磁性材料を円板状に形成したものからなり、中央には、ロータ出力軸4が圧入固定される軸固定孔33が設けられている。ロータバックヨーク31には、ロータバックヨーク31の軽量化と防振特性を向上させるため、複数の打抜孔34が軸固定孔33を中心に環状に形成されている。
この例において、打抜孔34は、それぞれ扇状に8箇所形成されているが、打抜孔34の形状は、仕様に応じて任意に変更可能であり、その設置数が大きさなども自由に設計できる。
ロータバックヨーク31にはさらに、ロータマグネット32をインサート成形などによって一体的に固定するための貫通孔35が設けられている。貫通孔35は、ロータバックヨーク31の軸方向に貫通し、この例において、ロータマグネット32の各セグメントごとにセグメントの回転防止のため2個1組で8極(8個)設けられている。
ロータマグネット32は、上述した8セグメント(極)のマグネットメンバー32a〜32hから構成されているが、各マグネットメンバー32a〜32hは、それぞれ同一構成であるため、以下においては1つのマグネットメンバー32aを例にとって説明する。
マグネットメンバー32aは、磁束密度が飽和しない磁石材料が用いられており、この例では、SmFeNプラスチックマグネットが用いられている。なお、マグネットメンバー32aの素材は仕様に応じて任意であり、焼結磁石などであってもよい。
図4(a)に示すように、マグネットメンバー32aは、ステータ2のティース面22に対向する面321が、半径方向の内側から外側に向けて周方向の幅が大きくなる扇状に形成されており、半径方向の外周面側がさらに凸状に張り出すように形成されている。
これによれば、マグネットメンバー32aのティース対向面321が、半径方向に内径側から外径側に向かって凸状に形成されていることにより、誘起電圧波形が正弦波状になり、トルクリップルやコギングトルクを小さく抑えることができる。上述した特許文献2に記載されているマグネット形状の場合は、誘起電圧波形が矩形状にあり、トルクリップルやコギングトルクを抑えることができない。
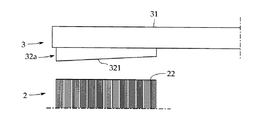
図5を併せて参照して、マグネットメンバー32aは、ティース対向面321の軸方向の厚さが半径方向の内側から外側に向かって漸次厚くなるように形成されている。この例において、ティース対向面321は、側面視において内径側から外径側に向けて直線状に厚さが増している。
図9(a)〜(d)を用いて、ロータマグネット32の半径r上で発生する磁束がコア部材23の内径側でいかに分散されるかを述べる。図9(a)および(b)は、ロータマグネット32の内径側の周方向の幅を小さくした場合(特許文献2のような場合)のロータマグネット32からコア部材23の内径側への磁束の流れを表している。
図9(a)から分かるように、ロータ3が回転軸を中心に回転してコア部材23を横切るとき、ロータマグネット32の半径r上で発生する磁束φがティース面22を介してコア部材23の巻線部25を流れる。このとき、磁束φは、コア部材23はH字状の電磁鋼板が半径方向に沿って積層されて構成されているため、半径方向(積層方向)よりも軸方向(電磁鋼板内)に流れようとする。
図9(a)のロータマグネット32の場合、ロータマグネット32の内径側の周方向の幅が外径側よりも小さくされているので、ロータマグネット32がコア部材23の上を横切る間、電磁鋼板には磁束φが流れてゆく。したがって、電磁鋼板の周方向の断面で磁気飽和の状態となった場合、鉄損が大きくなり、損失が発生する。
次に、本発明のロータマグネットである図9(c)について述べる。本発明のロータマグネット32は、マグネット面の軸方向の厚さが半径方向の内側から外側にかけて漸次厚くなるように形成されている。換言すれば、内径側のマグネット面231の軸方向の厚さは薄くなっている。
このとき、半径r上でのロータマグネット32の周方向の磁束がφであるとき、マグネットの軸方向の厚さは薄くなっているので、周方向の幅は、図9(a)と比較して大きくなり、ロータマグネット32がコア部材23上を横切って電磁鋼板に磁束φが流れる区間は小さくなる。したがって、電磁鋼板の周方向の断面を通過する磁束φが周方向に分散されて、磁束飽和の状態が改善され、鉄損の発生を抑えられる。
これによれば、上述した条件を満足するようにロータマグネット32の内径側から外径側に向けて厚さを変えてゆくことで、図8に示すように、単位面積当たりの磁束密度の変化率を従来と比較した場合、従来は台形状のピーク曲線となるのに対し、実施例は、両端から中央に向かって半円状のピーク曲線となり、鉄損が大きくなる領域にピーク曲線がかかる領域が少なくなる。
さらに、本発明によれば、コア部材23での磁気飽和を緩和するには、マグネットの軸方向の厚みを薄くするだけでよく、ステータ2と対向するロータマグネット32のマグネット面321の形状を自由に設計できる。
なお、この例において、ティース対向面32は、その厚みが内径側から外径側に向かって直線状に増すように形成されているが、これ以外に図6(a)に示すように、内径側から中央にかけての一部が傾斜するように形成されていてもよい。
さらには、図6(b)に示すように、ティース対向面32を内径側から外径側に向かって階段状に厚さを変化させるようにしてもよい。さらには、図6(c)および(d)に示すように、内径側から外径側に向かって凸曲面または凹曲面状に形成されていてもよく、内径側から外径側に向かって厚さが厚くなるように形成されていれば、これら変形例も本発明に含まれる。
図7(a)〜(c)を参照して、上記実施例でのロータマグネット32の軸方向の厚みと、コア部材23の巻線部の周方向の幅との関係は、以下の式により表すことができる。すなわち、ローターマグネット32aの内径側の厚みをtm,外径側の厚みをTm,ローターマグネット32aの内径側の周方向の幅をlm,外径側の周方向の幅をLm,コア部材23の巻線部の内径側の周方向の幅をtk,外径側の周方向の幅をTkとしたとき、ローターマグネット32aは、
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足するように設計されている。
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足するように設計されている。
なお、本実施例では、コア部材23の巻線部の周方向の幅tkは、内径側に向かうにつれて小さくなっている(コア部材23のティース面形状がほぼ台形状となっている)が、本発明はこの実施例に限定されない。例えば、コア部材23の巻線の周方向の幅tkと、外径側の幅Tkとが同じになる条件であってもよい。すなわち、(tk/Tk)=1となり、コア部材23のティース面形状が方形状となる。
このような場合においては、コア部材23の巻線部の周方向の幅が、径方向で同じになり、磁束の通りやすさに差は生じないように思われるが、ロータマグネット32の周方向の幅が内径と外径で異なる場合は、例えば図7(a)に示すように、内径側の周方向の幅lmが、外径側の周方向の幅Lmよりも大きくなる場合には、コア部材23の巻線部の内径側で磁気飽和の状態となり得る。このような場合には、ロータマグネット32の内径側の磁気飽和を抑えるため、厚みtmを小さくすることが好ましい。すなわち、以下の式で表される条件を満足すればよい。
(Lm/lm)<1のときに、(tm/Tm)<1
(Lm/lm)<1のときに、(tm/Tm)<1
1 アキシャルエアギャップ型電動機
2 ステータ
21a〜21i ポールメンバー
22 ティース面
23 コア部材
3 ロータ
31 ロータバックヨーク
32a〜32h ロータマグネット
321 ティース対向面
4 ロータ出力軸
5 回路基板
2 ステータ
21a〜21i ポールメンバー
22 ティース面
23 コア部材
3 ロータ
31 ロータバックヨーク
32a〜32h ロータマグネット
321 ティース対向面
4 ロータ出力軸
5 回路基板
Claims (5)
- ステータとロータとが上記ロータの出力軸の軸線に沿って所定の空隙をもって対向配置されているアキシャルエアギャップ型電動機において、
上記ロータは、上記軸線を中心として環状に配置された複数のロータマグネットを含み、上記ロータマグネットは、上記ステータに対向するマグネット面の軸方向の厚さが半径方向の内径側から外径側に向かって漸次厚くなるように形成されていることを特徴とするアキシャルエアギャップ型電動機。 - 上記ステータは、内径側と外径側とで周方向の幅が異なるボビン状のコア部材を含む複数のポールメンバーが、上記軸線を中心に環状に配置されており、
上記ローターマグネットの内径側の厚みをtm,外径側の厚みをTm,上記コア部材の巻線部の内径側の周方向の幅をtk,外径側の周方向の幅をTkとしたとき、上記ローターマグネットは、
(tk/Tk)<1のとき、(tm/Tm)<1
の条件を満足することを特徴とする請求項1に記載のアキシャルエアギャップ型電動機。 - 上記マグネット面は、側面視にて少なくとも一部が直線状に傾斜していることを特徴とする請求項1または2に記載のアキシャルエアギャップ型電動機。
- 上記マグネット面は、側面視にて少なくとも一部が階段状に傾斜していることを特徴とする請求項1または2に記載のアキシャルエアギャップ型電動機。
- 上記マグネット面は、側面視にて少なくとも一部が円弧状に傾斜していることを特徴とする請求項1または2に記載のアキシャルエアギャップ型電動機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008092289A JP2009247158A (ja) | 2008-03-31 | 2008-03-31 | アキシャルエアギャップ型電動機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008092289A JP2009247158A (ja) | 2008-03-31 | 2008-03-31 | アキシャルエアギャップ型電動機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009247158A true JP2009247158A (ja) | 2009-10-22 |
Family
ID=41308462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008092289A Pending JP2009247158A (ja) | 2008-03-31 | 2008-03-31 | アキシャルエアギャップ型電動機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009247158A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101243303B1 (ko) | 2011-11-07 | 2013-03-15 | 동아대학교 산학협력단 | 영구자석형 전동기 |
| CN108880038A (zh) * | 2018-07-26 | 2018-11-23 | 南京航空航天大学 | 混合极转子及电机 |
| DE102020101642A1 (de) | 2020-01-24 | 2021-07-29 | Schaeffler Technologies AG & Co. KG | Rotor, Verfahren zur Herstellung eines Rotors und Axialflussmaschine |
| WO2026058526A1 (ja) * | 2024-09-12 | 2026-03-19 | 株式会社デンソー | 回転電機 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005253188A (ja) * | 2004-03-03 | 2005-09-15 | Equos Research Co Ltd | アキシャルギャップ回転電機 |
| JP2006067650A (ja) * | 2004-08-25 | 2006-03-09 | Fujitsu General Ltd | アキシャルギャップ型電動機 |
-
2008
- 2008-03-31 JP JP2008092289A patent/JP2009247158A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005253188A (ja) * | 2004-03-03 | 2005-09-15 | Equos Research Co Ltd | アキシャルギャップ回転電機 |
| JP2006067650A (ja) * | 2004-08-25 | 2006-03-09 | Fujitsu General Ltd | アキシャルギャップ型電動機 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101243303B1 (ko) | 2011-11-07 | 2013-03-15 | 동아대학교 산학협력단 | 영구자석형 전동기 |
| CN108880038A (zh) * | 2018-07-26 | 2018-11-23 | 南京航空航天大学 | 混合极转子及电机 |
| DE102020101642A1 (de) | 2020-01-24 | 2021-07-29 | Schaeffler Technologies AG & Co. KG | Rotor, Verfahren zur Herstellung eines Rotors und Axialflussmaschine |
| US20230051582A1 (en) * | 2020-01-24 | 2023-02-16 | Schaeffler Technologies AG & Co. KG | Rotor, method for producing a rotor and axial flux machine |
| WO2026058526A1 (ja) * | 2024-09-12 | 2026-03-19 | 株式会社デンソー | 回転電機 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9013082B2 (en) | Rotating machine and rotor thereof | |
| CN100578892C (zh) | 电动发电机 | |
| JP5418467B2 (ja) | 回転電機 | |
| JP5120687B2 (ja) | 永久磁石型回転機の固定子構造 | |
| US9337692B2 (en) | Permanent magnet rotor with flux barrier for reduced demagnetization | |
| JPWO2017212575A1 (ja) | 永久磁石モータ | |
| JP2015070721A (ja) | 永久磁石回転電機 | |
| JP6748852B2 (ja) | ブラシレスモータ | |
| JP2018057155A (ja) | 回転電機の回転子 | |
| US12580433B2 (en) | Rotor and motor | |
| JP2011166952A (ja) | 永久磁石形回転機 | |
| JP2008278590A (ja) | 回転電機 | |
| JP4466262B2 (ja) | アキシャルギャップモータのロータ構造 | |
| WO2022114176A1 (ja) | 電動機 | |
| JP2010035375A (ja) | モータ | |
| JP2009247158A (ja) | アキシャルエアギャップ型電動機 | |
| JP2012125111A (ja) | アウターロータ型回転機のロータ | |
| JP2014180096A (ja) | 永久磁石回転電機およびエレベーター駆動巻上機 | |
| JP5801693B2 (ja) | モータ | |
| JP2020010539A (ja) | ロータ、及びブラシレスモータ | |
| KR20180138323A (ko) | 자속 집중형 모터 | |
| JP2005210828A (ja) | 回転電機のロータおよび回転電機 | |
| WO2025197096A1 (ja) | ロータ及びモータ | |
| JP2005039909A (ja) | 永久磁石埋込型モータ | |
| JP6012046B2 (ja) | ブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100319 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120215 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120704 |