JP2010096609A - 圧力センサ素子 - Google Patents
圧力センサ素子 Download PDFInfo
- Publication number
- JP2010096609A JP2010096609A JP2008267168A JP2008267168A JP2010096609A JP 2010096609 A JP2010096609 A JP 2010096609A JP 2008267168 A JP2008267168 A JP 2008267168A JP 2008267168 A JP2008267168 A JP 2008267168A JP 2010096609 A JP2010096609 A JP 2010096609A
- Authority
- JP
- Japan
- Prior art keywords
- sensor element
- gel
- carbon fiber
- coiled carbon
- matrix portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 229920000049 Carbon (fiber) Polymers 0.000 claims abstract description 98
- 239000004917 carbon fiber Substances 0.000 claims abstract description 98
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 claims abstract description 80
- 239000011159 matrix material Substances 0.000 claims abstract description 66
- 229920000642 polymer Polymers 0.000 claims abstract description 26
- 229920001296 polysiloxane Polymers 0.000 claims description 14
- 229920002125 Sokalan® Polymers 0.000 claims description 10
- 239000004215 Carbon black (E152) Substances 0.000 claims description 9
- 229930195733 hydrocarbon Natural products 0.000 claims description 9
- 150000002430 hydrocarbons Chemical class 0.000 claims description 9
- 239000004584 polyacrylic acid Substances 0.000 claims description 9
- 229920005992 thermoplastic resin Polymers 0.000 claims description 9
- 239000000512 collagen gel Substances 0.000 claims description 7
- 230000035515 penetration Effects 0.000 claims description 7
- 239000000758 substrate Substances 0.000 claims description 7
- 230000035945 sensitivity Effects 0.000 abstract description 28
- 230000008859 change Effects 0.000 abstract description 20
- 230000008602 contraction Effects 0.000 abstract description 5
- 239000000499 gel Substances 0.000 description 81
- 238000000034 method Methods 0.000 description 12
- 238000001514 detection method Methods 0.000 description 11
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 7
- 239000013013 elastic material Substances 0.000 description 6
- 239000003054 catalyst Substances 0.000 description 5
- 239000011248 coating agent Substances 0.000 description 5
- 238000000576 coating method Methods 0.000 description 5
- 230000005291 magnetic effect Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 239000011347 resin Substances 0.000 description 5
- 229920002050 silicone resin Polymers 0.000 description 5
- 238000004804 winding Methods 0.000 description 5
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 4
- 229910052799 carbon Inorganic materials 0.000 description 4
- 230000000052 comparative effect Effects 0.000 description 4
- 239000010408 film Substances 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- 239000000843 powder Substances 0.000 description 4
- 239000000835 fiber Substances 0.000 description 3
- 239000007789 gas Substances 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 229920001495 poly(sodium acrylate) polymer Polymers 0.000 description 3
- NNMHYFLPFNGQFZ-UHFFFAOYSA-M sodium polyacrylate Chemical compound [Na+].[O-]C(=O)C=C NNMHYFLPFNGQFZ-UHFFFAOYSA-M 0.000 description 3
- -1 superelastic coils Substances 0.000 description 3
- 229920001817 Agar Polymers 0.000 description 2
- 108010010803 Gelatin Proteins 0.000 description 2
- VVQNEPGJFQJSBK-UHFFFAOYSA-N Methyl methacrylate Chemical compound COC(=O)C(C)=C VVQNEPGJFQJSBK-UHFFFAOYSA-N 0.000 description 2
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Chemical compound C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 2
- YTPLMLYBLZKORZ-UHFFFAOYSA-N Thiophene Chemical compound C=1C=CSC=1 YTPLMLYBLZKORZ-UHFFFAOYSA-N 0.000 description 2
- 239000008272 agar Substances 0.000 description 2
- HSFWRNGVRCDJHI-UHFFFAOYSA-N alpha-acetylene Natural products C#C HSFWRNGVRCDJHI-UHFFFAOYSA-N 0.000 description 2
- 229910052786 argon Inorganic materials 0.000 description 2
- 230000036772 blood pressure Effects 0.000 description 2
- 210000004204 blood vessel Anatomy 0.000 description 2
- 239000002134 carbon nanofiber Substances 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 229920001577 copolymer Polymers 0.000 description 2
- 238000004132 cross linking Methods 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 125000002534 ethynyl group Chemical group [H]C#C* 0.000 description 2
- 230000005294 ferromagnetic effect Effects 0.000 description 2
- 229920000159 gelatin Polymers 0.000 description 2
- 239000008273 gelatin Substances 0.000 description 2
- 235000019322 gelatine Nutrition 0.000 description 2
- 235000011852 gelatine desserts Nutrition 0.000 description 2
- 229910002804 graphite Inorganic materials 0.000 description 2
- 239000010439 graphite Substances 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 239000012535 impurity Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012856 packing Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 229920001059 synthetic polymer Polymers 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 229910052723 transition metal Inorganic materials 0.000 description 2
- 150000003624 transition metals Chemical class 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- RWSOTUBLDIXVET-UHFFFAOYSA-N Dihydrogen sulfide Chemical compound S RWSOTUBLDIXVET-UHFFFAOYSA-N 0.000 description 1
- 244000043261 Hevea brasiliensis Species 0.000 description 1
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 239000004372 Polyvinyl alcohol Substances 0.000 description 1
- 229920001328 Polyvinylidene chloride Polymers 0.000 description 1
- 229920002472 Starch Polymers 0.000 description 1
- GFBZUOBHZYBBBR-UHFFFAOYSA-N [Fe].[In].[Sn] Chemical compound [Fe].[In].[Sn] GFBZUOBHZYBBBR-UHFFFAOYSA-N 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 229920006026 co-polymeric resin Polymers 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229920000578 graft copolymer Polymers 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- 229910000037 hydrogen sulfide Inorganic materials 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 229920003052 natural elastomer Polymers 0.000 description 1
- 229920005615 natural polymer Polymers 0.000 description 1
- 229920001194 natural rubber Polymers 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 229920002451 polyvinyl alcohol Polymers 0.000 description 1
- 239000005033 polyvinylidene chloride Substances 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 229930195734 saturated hydrocarbon Natural products 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 235000019698 starch Nutrition 0.000 description 1
- 239000008107 starch Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- 238000005979 thermal decomposition reaction Methods 0.000 description 1
- 229920002725 thermoplastic elastomer Polymers 0.000 description 1
- 229920002803 thermoplastic polyurethane Polymers 0.000 description 1
- 229930192474 thiophene Natural products 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000001947 vapour-phase growth Methods 0.000 description 1
Images

Landscapes
- Compositions Of Macromolecular Compounds (AREA)
Abstract
【課題】本発明の目的は、センサに対する微弱な圧力変化であっても従来よりもさらに感度良く検出することができる圧力センサ素子を提供することにある。
【解決手段】圧力センサ素子1は、コイル状炭素繊維を高分子系ゲルに分散したセンサ素子マトリクス部2を備えている。高分子系ゲルによって従来よりも弾性率が低く柔らかく形成されたセンサ素子マトリクス部2に分散されたコイル状炭素繊維は、その伸縮に応じて電気特性が変化するため、その特性変化を検出することで高感度に圧力を検出する。
【選択図】図1
【解決手段】圧力センサ素子1は、コイル状炭素繊維を高分子系ゲルに分散したセンサ素子マトリクス部2を備えている。高分子系ゲルによって従来よりも弾性率が低く柔らかく形成されたセンサ素子マトリクス部2に分散されたコイル状炭素繊維は、その伸縮に応じて電気特性が変化するため、その特性変化を検出することで高感度に圧力を検出する。
【選択図】図1
Description
本発明は、圧力センサ素子に関するものである。特に、コイル状炭素繊維がゲルの中に分散されてセンサ素子マトリクス部を構成しており、微小な圧力を高感度に検出することのできる圧力センサ素子に関する。
コイル状炭素繊維(カーボンマイクロコイル)は、直径0.01〜100μm、ピッチ0.01〜100μmの螺旋構造を有する炭素繊維である。コイル状炭素繊維には伸縮性があり、その伸縮によって電気特性であるインダクタンス(L)、キャパシタンス(C)、及びレジスタンス(R)が変化するという性質を備えている。具体的には、コイル状炭素繊維が伸長すると前記L、C、及びRが増加し、コイル状炭素繊維が収縮すると前記L、C、及びRは減少する。コイル状炭素繊維の伸縮と前記L、C、Rの値の変化とは非常に高い相関を有しており、且つ再現性がよいことから、このコイル状炭素繊維は触圧を高精度に測定するセンサに利用することが可能である。
発明者らは、このコイル状炭素繊維を弾性材料に分散させてマトリクス部を形成し、このマトリクス部を利用することで、外圧を高精度に検出することができる圧力センサを発明し、特許文献1において提案している。特許文献1の圧力センサのマトリクス部には、長さが90〜150μm、コイルの直径が0.1〜10μmのコイル状炭素繊維が含まれる。このコイル状炭素繊維を分散させる弾性材料としては、シリコーン樹脂、ウレタン樹脂、エポキシ樹脂、スチレンと熱可塑性エラストマーとの共重合樹脂等の樹脂が好適に用いられる。特許文献1の圧力センサは、弾性材料中のコイル状炭素繊維の含量を増やすことによって外圧の検出感度を上げることが可能であるが、含量が30重量%を越えた場合にはマトリクス部が固くなって検出感度が落ちる傾向が認められるため、弾性材料中に含まれるコイル状炭素繊維の含量を0.1〜30重量%としている。
特許文献1の圧力センサは、簡単な構造でありながら幅広い圧力を高感度に検出することができ、且つ機械的強度に優れている。このために、例えば医療用器具のカテーテルの先端に取り付けられて血管内壁に当たったか否かを事前に検出し、血管の内壁を傷つけることを事前に回避することができる。又、血圧や脈拍の変化を常に監視し、異常を早期に検出することができる。
特許文献2には、外力の作用で抵抗値が変化する導電性感圧部材と、この導電性感圧部材を支持する支持体とを備え、外力の検出のために該導電性部材の抵抗値を検出する感圧センサにおいて、導電性部材にゲル又はエラストマーにコイル状炭素繊維を混入した部材を利用する技術が開示されている。しかしこの特許文献2には、具体的なゲルとして如何なるものを使用するのかについては詳細に開示されてはいない。
特開2006−204378号公報
特開2006−184098号公報
本発明者らは、前記特許文献1の提案後も継続して検討を進めることにより、改良すべき課題が存在していることを知るに至った。特許文献1の圧力センサには、コイル状炭素繊維が弾性材料である樹脂に分散されたマトリクス部が用いられている。圧力を受けたマトリクス部の中のコイル状炭素繊維は、周囲の樹脂と同程度に変形することでその電気特性(LCR成分)が変化する。ところが、特許文献1にて提案した樹脂は全てコイル状炭素繊維よりも固く弾性率が大きい。このために、極めて微小な圧力を受けた場合のマトリクス部の変形は、同じ圧力をコイル状炭素繊維単体が受けた場合と比較すると、相対的に小さくなっていた。特許文献1の圧力センサは、マトリクス部に分散されているコイル状炭素繊維の変形に伴う電気特性の変化を検知して高感度に外圧を検出するため、マトリクス部の変形が微小である場合にはその中のコイル状炭素繊維の変形を検出することが困難であり、微弱な圧力を検出するための圧力センサとしては感度が不充分な場合があった。
本発明は、このような従来技術における課題を解決するためになされたものであり、その目的とするところは、センサに対する極めて微弱な圧力変化であっても従来よりもさらに感度良く検出することができる圧力センサ素子を提供することにある。
上記目的を達成するために、本発明の圧力センサ素子は、コイル状炭素繊維を高分子系ゲル中に分散したセンサ素子マトリクス部と、センサ素子マトリクス部を支持する基板と、センサ素子マトリクス部に接続される一対の電極とを備えていることを特徴とする。本発明のセンサ素子マトリクス部に適用される高分子系ゲルは、シリコーンゲル、ポリアクリル酸系ゲル、炭化水素系熱可塑性樹脂を含むゲル、コラーゲンゲルの中のいずれか1種又は2種以上を含むゲルである。
本発明の圧力センサ素子は、コイル状炭素繊維を分散させるために、弾性材料の中でも柔らかく弾性率が小さいシリコーンゲル、ポリアクリル酸系ゲル、炭化水素系熱可塑性樹脂を含むゲル、コラーゲンゲルの中のいずれか1種又は2種以上のゲルを適用してマトリクス部を構成する。これにより本発明の圧力センサ素子のマトリクス部は、僅かな触圧に対して従来よりも変形し易くなり、同時にマトリクス部に分散しているコイル状炭素繊維が変形しやすくなることから、コイル状炭素繊維の電気特性の変化を大きく発現させることができる。この結果、本発明の圧力センサ素子は、極めて微弱な圧力変化であっても従来よりもさらに感度良く検出することが可能となる。
本発明の圧力センサ素子は、センサ素子マトリクス部の高分子系ゲルに対するコイル状炭素繊維の添加量が0.1〜40重量%であり、且つコイル状炭素繊維の長さが10μm以上10mm以下であることを特徴とする。
圧力センサ素子が微弱な圧力変化に対して高い検出感度を得るためには、電気信号を発生するコイル状炭素繊維の添加量を0.1重量%以上とすることが好ましい。一方で、コイル状炭素繊維の添加量が40重量%を越えた場合には、マトリクス部が固くなりセンサとして必要な感度が得られなくなる恐れがある。以上のことから、センサ素子マトリクス部の高分子系ゲルに対するコイル状炭素繊維の添加量は0.1〜40重量%が好適である。
又、コイル状炭素繊維は、10μm以上の長さのものを用いることで検出感度を高くすることが可能である。一方で、10mm以上の非常に長いコイル状炭素繊維を用いることは、高分子系ゲルに均一に分散させることが困難となる。このため、センサ素子マトリクス部に添加されるコイル状炭素繊維の長さは、10μm以上10mm以下が好適である。
本発明の圧力センサは、センサ素子マトリクス部に用いられる高分子系ゲルが、JIS K2220で規定される針入度で20以上200以下であることを特徴とする。本発明に係る圧力センサは、センサ素子マトリクス部に用いられる高分子系ゲルが前記針入度を備えることによって、従来用いられていた弾性体よりも有意に小さい弾性率を備えることとなる。この結果、センサ素子マトリクス部全体の弾性率を小さくすることが可能となり、極めて微弱な圧力変化であっても従来よりもさらに感度良く検出することができる。
本発明の圧力センサ素子は、コイル状炭素繊維を分散させるために、弾性材料の中でも弾性率が小さく柔らかい、シリコーンゲル、ポリアクリル酸系ゲル、炭化水素系熱可塑性樹脂を含むゲル、コラーゲンゲルの中のいずれか1種又は2種以上のゲルを適用してセンサ素子マトリクス部を構成する。これにより、センサ素子マトリクス部に加えられる圧力が微小であってもより変形し易くなり、センサ素子マトリクス部に含まれるコイル状炭素繊維のより大きな構造変化がもたらされる。この結果、コイル状炭素繊維の電気特性(LCR成分)の変化が大きくなって、圧力の検出感度が向上する。
本発明は、センサ素子マトリクス部を構成するゲルが柔らかいために、従来よりもコイル状炭素繊維の添加量を増やすことが可能であり、これによって一層圧力の検出感度を高めることができる。
以下本発明について添付図面に基づいて具体的に説明する。本実施形態における圧力センサ素子の概略断面図を図1に示す。本実施態様における圧力センサ素子1は、コイル状炭素繊維がゲルに分散されて構成されたセンサ素子マトリクス部2(以下、単にマトリクス部2とも称する)と、このマトリクス部2を支持している基板3とを備えている。マトリクス部2の変形によりコイル状炭素繊維の構造変化がもたらされ、この構造変化による電気特性の変化が検出されて圧力が検出される。
マトリクス部2と基板3との間に、マトリクス部2の電気特性の変化を感受するように一対の電極4が設けられている。電極4には、それぞれ図示されない接続線が接続されて延びており、図示されないLCR測定装置に接続されて、電気特性としてインダクタンス(L)、静電容量(C、キャパシタンス)及び電気抵抗(R、レジスタンス)を測定してオシロスコープ等に表示することができるようになっている。
マトリクス部2は、高分子系ゲルにコイル状炭素繊維が分散されて構成されている。このゲルは誘電体であって、静電容量(C)を有し、コンデンサとして作用する。本発明で好適に使用される高分子系ゲルは、安定な支持構造を有する3次元網目構造を持っており、高分子及びその膨潤体で構成されている。高分子系ゲルには、寒天やゼラチンなどの天然高分子ゲルと、メチルメタクリレート、シリコーン、スチレンージビニルベンゼン共重合体のような合成高分子系ゲルの2種類がある。高分子系ゲルは、高分子が液体を吸収し膨潤したものである。したがって、高分子系ゲルは、見かけ上液体と固体の中間の物質形態をとっているが、架橋度の違いに応じて高分子ゲルは粘性のある液体に近いものからかなり硬い固体まで変化する。また一般にゴムのような弾性を示すと同時に、非線形的に形状を変える塑性をも併せ持っている。さらに外界と作用する開放系物質であるという事も高分子ゲルの重要な特性である。
本発明を実施するために使用される最良の高分子系ゲルとしては、シリコーンゲル、ポリアクリル酸系ゲル、炭化水素系熱可塑性樹脂を含むゲル、コラーゲンゲル等が用いられる。具体的には、シリコーンゲルとして、信越化学(株)製の商品名、KE−1052(JIS K2220で規定される針入度65)、KE1056(JIS K2220で規定される針入度90)等が挙げられる。ポリアクリル酸系ゲルとしては、ポリアクリル酸ナトリウム、カルボキシビニルポリマー等が挙げられる。炭化水素系熱可塑性樹脂を含むゲルとして大場機工(株)の商品名、ゲルOKパッキン等が挙げられる。
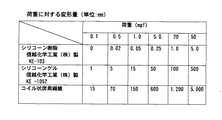
ゲルの硬さは圧力センサ素子1の感度を向上させる上で重要である。ゲルがJIS K2220で規定される針入度で20以上200以下の堅さを備えることによって、従来用いられていた樹脂に対して弾性率が有意に小さくなり、変形しやすくなる。図2に、デュロメータ硬度24の従来のシリコーン樹脂(信越化学(株)製 商品名:KE−103)と、JIS K 2220で規定される針入度が65のシリコーンゲル(信越化学(株)製 商品名:KE−1052)と、コイル状炭素繊維について、加重に対する変形量を示す。同一の加重を受けた場合のシリコーンゲルの変形量はシリコーン樹脂の変形量よりも大きく、シリコーンゲルが、よりコイル状炭素繊維に近い硬さを備えていることが明らかである。シリコーンゲルとコイル状炭素繊維とで構成されるセンサ素子マトリクス部2は、その弾性率が従来と比較して非常に小さく柔らかいために、極微弱な圧力変化であっても伸縮してその圧力を高感度で検出することができる。
前記の高分子系ゲルにはコイル状炭素繊維が分散されるが、そのコイル状炭素繊維としては一重巻きのコイル状炭素繊維、二重巻きのコイル状炭素繊維、超弾性コイル又はそれらの混合物等が用いられる。コイル状炭素繊維は弾性体としての機械特性を有していると同時に、その伸縮により電気特性であるインダクタンス(L)、静電容量(C)及び電気抵抗(R)が変化する。このため、それらの変化量に基づいて圧力を検出することができる。例えば、コイル状炭素繊維を伸ばすと上記L、C及びRが増加し、収縮させるとL、C及びRが減少する。具体的には、所定のコイル状炭素繊維を例えば4mm伸ばすと、Lは0.1mH増加し、Cは600pF増加し、Rは4.5kΩ増加する。そして、コイル状炭素繊維を収縮させて元の長さに戻すと、L、C及びRは元の値まで再現性良く戻る。
コイル状炭素繊維と高分子系ゲルから成るマトリクス部に外部から圧力が加わったとき、まずゲルが伸縮し、次いでコイル状炭素繊維が伸縮するため、ゲルを介してコイル状炭素繊維に加わる圧力に基づいて前記L、C及びRの値が変化する。
前記一重巻きのコイル状炭素繊維としては、1本のコイルの直径が0.01〜50μm、コイルのギャップ(繊維と繊維との間隔)が0.01〜10μm及びコイルの長さが10μm〜10mmであるものが好ましい。製造の容易性等の観点から、コイルの直径は0.1〜10μmであることが好ましく、ギャップは0.1〜10μmであることが好ましい。このコイル状炭素繊維は、一定の太さを有するコイルが一定のピッチ(間隔)をおいて一重巻きで螺旋状に延びるように形成されている。このため、一重巻きのコイル状炭素繊維は、弾力性に優れ、あらゆる方向からの圧力に対して容易に変形し、従ってあらゆる方向からの圧力を高感度で検出することができる。
一方、二重巻きのコイル状炭素繊維の場合には、2本のコイルが交互に密接した状態で螺旋状に延び、従って全体としてほぼ円筒状をなし、中心には空洞が形成されている。二重巻きのコイル状炭素繊維としては、コイルの直径が0.01〜50μm、ギャップがほぼ0で長さが10μm〜10mmであるものが好ましい。二重巻きのコイル状炭素繊維は一重巻きのコイル状炭素繊維に比べて弾力性が乏しく、圧力を受けたときに変位しにくいという性質がある。
また、超弾性コイルはコイルの直径が大きく、線径が小さいものをいい、弾力性がより大きいコイルのことをいう。具体的には、超弾性コイルは、コイルの直径が5〜50μm、コイルのギャップが0.1〜10μm及びコイルの長さが10μm〜10mmであるものが好ましい。なお、コイル状炭素繊維の巻き方向は、コイルの軸線を中心として時計方向(右巻き)又は反時計方向(左巻き)のいずれであってもよい。
コイル状炭素繊維は、ゲル中に0.1〜40重量%含まれることが好ましい。より好ましい含量は、1〜10重量%である。含有量が0.1重量%未満の場合には、ゲルに対するコイル状炭素繊維の割合が少ないために、コイル状炭素繊維に基づく圧力センサ12の感度が低下する。一方、含有量が40重量%を越える場合には、ゲルに対するコイル状炭素繊維の割合が多くなり過ぎて固くなり、又成形性が悪くなる傾向を示す。
コイル状炭素繊維は、どのような製法で製造されたものであってもよいが、例えば触媒活性化CVD(化学気相成長)法等により得られる。この気相成長法は、Ni粉末触媒を塗布したグラファイト基板上に、チオフェン又は硫化水素を不純物として含有するアセチレン、水素ガス、アルゴンを流入させ、600〜950℃に加熱して、気相中でアセチレンを分解してコイル状炭素繊維を得る方法である。この方法により得られるコイル状炭素繊維は非晶質であり、その大半が繊維の中心部分まで微細な炭素粒が詰まった状態で形成されている。また、一部には中空状に形成されたものも観察される。
さらに、加熱処理を施すことにより、非晶質のコイル状炭素繊維をグラファイト化(六方晶系)することができる。加熱条件としては、ヘリウム又はアルゴンなどの不活性雰囲気下で、処理温度を950〜3000℃、好ましくは1500〜3000℃、最も好ましくは2000〜3000℃である。また処理時間は、0.1〜100時間、好ましくは1〜20時間、最も好ましくは3〜10時間である。このような処理を経ることにより、グラファイト層において炭素繊維を構成する炭素粒が規則正しく配列されることにより磁場の変動などを検知する際に生じる電気抵抗の変動が著しくなるために、共振特性が顕著となる。すなわちLCR共振回路におけるR成分などの変動が顕著となるので、センサの検出感度を向上させることができる。
なお、前記方法以外にもコイル状炭素繊維の製造方法としては、遷移金属触媒を設けた基板上に5b族化合物または6b族化合物よりなる不純物ガスと炭素原料ガスを600〜900℃の温度下において反応領域に静磁場を与えながら熱分解させて製造する方法(特開平11−124740号公報)や、鎖状飽和炭化水素などを原料として400〜900℃の温度範囲で、0.3〜60.0MPaの絶対圧力範囲で、触媒として遷移金属と酸化物半導体を共存させて製造する方法(特開2004−352592号公報)、インジウム・スズ・鉄系触媒を用いることを特徴とする方法(特開2004−261630号公報)などがあり、これらの製造方法により得られるコイル状炭素繊維を用いることも勿論可能である。
こうして得られたコイル状炭素繊維を、マトリクス部2の加圧と除圧が行われる方向に配向させた状態で配置することにより、コイル状炭素繊維が伸縮によって圧力の検出をより効果的に行うことができる。コイル状炭素繊維を配向させる方法としては例えば、コイル状炭素繊維の表面に強磁性体膜をコーティングする工程、前記コイル状炭素繊維をゲルに添加し、混合する工程、前記混合物を鋳型内に充填して、該型に対して配向させたい方向に強力磁石(永久磁石では磁場強度が1テスラ(1万ガウス)程度であるのに対し、高温超電導バルク磁石は10テスラ以上の磁場発生が可能)をセットしたのち、混合物を固化させる工程、固化させたゲルに一対の電極4を接続する工程、からなる製造方法がある。強磁性体のコーティングによってコイル状炭素繊維が、磁場内で整列され、その状態でゲルを注入し固化させて固定し、コイル状炭素繊維が配向されたセンサを得ることができるのである。
ゲルの中には、コイル状炭素繊維以外に気相成長繊維(VGCF)、カーボンナノファイバー、炭素粉末、金属粉末、誘電体粉末、圧電体粉末等を配合することもできる。また、コイル状炭素繊維の表面には、導電性を高めるために、金、銅等の金属薄膜を形成することにより、圧力センサ1の感度及び安定性を向上させることができる。
前記ゲルにコイル状炭素繊維を分散させる方法としては、硬化する前のゲルにコイル状炭素繊維を添加し、真空遠心混合して均一に分散させた後、脱泡し、鋳型に充填する方法がある。
本発明の圧力センサ素子1のマトリクス部2に、シリコーンゲル、ポリアクリル酸系ゲル、炭化水素系熱可塑性樹脂を含むゲル、コラーゲンゲルの他に、メチルメタクリレートゲル、ポリビニルアルコール/ポリアクリル系ゲル、スチレンージビニルベンゼン共重合体ゲルなどの合成高分子系ゲル、寒天やゼラチンなどの天然系ゲル、でんぷん/ポリアクリル酸グラフト系ポリマーゲルなどの複合ゲルを用いることができる。
コイル状炭素繊維を分散させたゲルをそのままの状態でマトリクス部2に用いた場合には大気と反応して変質する。変質を防止するためには、マトリクス部2の表面に架橋度を上げた層を形成するか、若しくはマトリクス部2の表面に超薄膜で被覆を行うことが好ましい。被覆の材料としては、天然ゴム、チオックス、ラテックス(登録商標)等のゴム、シリコーン、ポリ塩化ビニリデン、ポリプロピレン等の気体と液体の透過性の低いものが好適に用いられる。
マトリクス部2を微小鋳型に充填して硬化する場合には、あらかじめ微小鋳型上に上記被覆材料の超薄膜をライニングし、コイル状炭素繊維を分散させた硬化前のゲルを注入後、その上からさらに超薄膜をライニングして固化させることで、必要な被覆を行うことができる。大きな鋳型を用いてマトリクス部2を作成する場合には、マトリクス部2を硬化した後、超薄膜のライニングを施すことも可能である。又、マトリクス部2の硬化を行う前に、鋳型に電極4を配置した状態にしておくことによりセンサ素子との電気的接続が形成されて成形できる。
以下、実施例及び比較例により、本発明の実施形態をさらに具体的に説明する。
(実施例1)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維をシリコーンゲル(商品名:KE1052,信越化学工業製)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例2)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維を、ポリアクリル酸系ゲル(ポリアクリル酸ナトリウム)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例3)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維を、コラーゲンゲル中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例4)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維を、炭化水素系熱可塑性樹脂を含むゲル(商品名:ゲルOKパッキン,大場機工(株)製)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(比較例1)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維をシリコーン樹脂(商品名:KE103,信越化学工業製)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例1)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維をシリコーンゲル(商品名:KE1052,信越化学工業製)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例2)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維を、ポリアクリル酸系ゲル(ポリアクリル酸ナトリウム)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例3)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維を、コラーゲンゲル中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(実施例4)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維を、炭化水素系熱可塑性樹脂を含むゲル(商品名:ゲルOKパッキン,大場機工(株)製)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
(比較例1)
長さが平均500μm、コイル径が平均5μmのコイル状炭素繊維をシリコーン樹脂(商品名:KE103,信越化学工業製)中に10.0重量%添加したセンサ素子マトリクス部2を形成して、圧力センサ素子1を作成した。
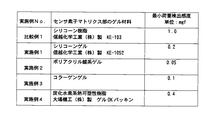
実施例1〜4及び比較例1にて成形した圧力センサ素子は、直径10mm、高さ5mmの半球形状に成形されている。これらの圧力センサ素子を静置した状態で、センサ素子マトリクス部2の上側から微小な荷重をかけて徐々にその荷重を増やすことで、各々の圧力センサ素子の最小荷重検出感度を測定した。その結果を図3に示す。図3からも明らかなように、本発明実施例1〜4の圧力センサ素子は、シリコーン樹脂にてマトリクス部2を形成された従来の圧力センサ素子に比較して、最も感度の低い実施例4の炭化水素系熱可塑性樹脂を含むゲルを適用した圧力センサ素子であっても、従来の40%の荷重である0.4mgfの荷重を検出することが可能である。又、最も感度の高い実施例3のポリアクリル酸ナトリウムを適用した圧力センサ素子は、従来の5%の荷重である0.05mgfの荷重を検出することが可能であり、従来の20倍の感度を備えている。このように、本発明の圧力センサ素子1は、微小な圧力に対してセンサ素子マトリクス部2がより大きく変形可能でありそこに含まれるコイル状炭素繊維にもより大きな構造変化がもたらされるために、コイル状炭素繊維の電気特性(LCR成分)がより変化し易くなっており、結果圧力の検出感度が向上している。
本実施例1〜4の圧力センサ素子1は、センサ素子マトリクス部2を構成するゲルが柔らかいために、従来よりもコイル状炭素繊維の添加量を増やすことが可能であり、これによって一層圧力の検出感度を高めることができる。
本発明の圧力センサ素子は、センサ素子マトリクス部を高分子系ゲルで構成することにより、従来の圧力センサ素子よりも感度が著しく向上している。そこで、このように高感度な圧力センサ素子は、カテーテル用センサ素子をはじめとして、各種触覚情報検知用センサ素子、血圧測定用センサ素子、血流音検出センサ素子、波動検出用センサ素子、として利用可能である。
1 圧力センサ素子
2 センサ素子マトリクス部
3 基板
4 電極
2 センサ素子マトリクス部
3 基板
4 電極
Claims (3)
- コイル状炭素繊維を高分子系ゲル中に分散したセンサ素子マトリクス部と、
前記センサ素子マトリクス部を支持する基板と、
前記センサ素子マトリクス部に接続される一対の電極とを備えている圧力センサ素子であって、
センサ素子マトリクス部の高分子系ゲルが、シリコーンゲル、ポリアクリル酸系ゲル、炭化水素系熱可塑性樹脂を含むゲル、コラーゲンゲルの中のいずれか1種又は2種以上を含むゲルであることを特徴とする圧力センサ素子。 - センサ素子マトリクス部の高分子系ゲルに対するコイル状炭素繊維の添加量が0.1〜40重量%であり、且つコイル状炭素繊維の長さが10μm以上10mm以下であることを特徴とする請求項1に記載の圧力センサ素子。
- センサ素子マトリクス部の高分子系ゲルはJIS K2220で規定される針入度が20以上200以下であることを特徴とする請求項1又は2に記載の圧力センサ素子。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008267168A JP2010096609A (ja) | 2008-10-16 | 2008-10-16 | 圧力センサ素子 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008267168A JP2010096609A (ja) | 2008-10-16 | 2008-10-16 | 圧力センサ素子 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010096609A true JP2010096609A (ja) | 2010-04-30 |
Family
ID=42258398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008267168A Pending JP2010096609A (ja) | 2008-10-16 | 2008-10-16 | 圧力センサ素子 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010096609A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105156775A (zh) * | 2015-08-11 | 2015-12-16 | 广东双虹新材料科技有限公司 | 一种管内流体压力能被检知的弹性微管 |
| KR20160109621A (ko) * | 2015-03-12 | 2016-09-21 | 엘지이노텍 주식회사 | 레인 센서 및 이를 포함하는 와이퍼 구동 장치 |
| KR20170084879A (ko) * | 2016-01-13 | 2017-07-21 | (주)창성 | 탄소마이크로코일센서를 포함하는 통행자 인식시스템 |
| US9735747B2 (en) * | 2015-07-10 | 2017-08-15 | Intel Corporation | Balancing mobile device audio |
| KR20180061495A (ko) * | 2016-11-29 | 2018-06-08 | 중앙대학교 산학협력단 | 센서 및 이의 제조방법 |
| CN108981976A (zh) * | 2018-08-14 | 2018-12-11 | 深圳大学 | 一种柔性电容式应力传感器芯片及其制备方法 |
| KR20190132853A (ko) * | 2018-05-21 | 2019-11-29 | 한국전자통신연구원 | 나노 복합체 센서의 제조 방법 및 나노 복합체의 제조 방법 |
| CN111198063A (zh) * | 2018-11-16 | 2020-05-26 | 北京纳米能源与系统研究所 | 一种压力传感器 |
-
2008
- 2008-10-16 JP JP2008267168A patent/JP2010096609A/ja active Pending
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10407028B2 (en) | 2015-03-12 | 2019-09-10 | Lg Innotek Co., Ltd. | Rain sensor and wiper driving apparatus comprising same |
| KR20160109621A (ko) * | 2015-03-12 | 2016-09-21 | 엘지이노텍 주식회사 | 레인 센서 및 이를 포함하는 와이퍼 구동 장치 |
| KR102327610B1 (ko) | 2015-03-12 | 2021-11-17 | 엘지이노텍 주식회사 | 레인 센서 및 이를 포함하는 와이퍼 구동 장치 |
| CN107428315B (zh) * | 2015-03-12 | 2021-02-05 | Lg伊诺特有限公司 | 雨传感器和包括该雨传感器的雨刷驱动装置 |
| CN107428315A (zh) * | 2015-03-12 | 2017-12-01 | Lg伊诺特有限公司 | 雨传感器和包括该雨传感器的雨刷驱动装置 |
| EP3269603A4 (en) * | 2015-03-12 | 2018-02-21 | LG Innotek Co., Ltd. | Rain sensor and wiper driving apparatus comprising same |
| US9735747B2 (en) * | 2015-07-10 | 2017-08-15 | Intel Corporation | Balancing mobile device audio |
| CN105156775A (zh) * | 2015-08-11 | 2015-12-16 | 广东双虹新材料科技有限公司 | 一种管内流体压力能被检知的弹性微管 |
| KR20170084879A (ko) * | 2016-01-13 | 2017-07-21 | (주)창성 | 탄소마이크로코일센서를 포함하는 통행자 인식시스템 |
| KR101896158B1 (ko) | 2016-11-29 | 2018-09-07 | 중앙대학교 산학협력단 | 센서 및 이의 제조방법 |
| KR20180061495A (ko) * | 2016-11-29 | 2018-06-08 | 중앙대학교 산학협력단 | 센서 및 이의 제조방법 |
| KR20190132853A (ko) * | 2018-05-21 | 2019-11-29 | 한국전자통신연구원 | 나노 복합체 센서의 제조 방법 및 나노 복합체의 제조 방법 |
| KR102576519B1 (ko) * | 2018-05-21 | 2023-09-12 | 한국전자통신연구원 | 나노 복합체 센서의 제조 방법 및 나노 복합체의 제조 방법 |
| CN108981976A (zh) * | 2018-08-14 | 2018-12-11 | 深圳大学 | 一种柔性电容式应力传感器芯片及其制备方法 |
| CN111198063A (zh) * | 2018-11-16 | 2020-05-26 | 北京纳米能源与系统研究所 | 一种压力传感器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010096609A (ja) | 圧力センサ素子 | |
| Huang et al. | Three-dimensional light-weight piezoresistive sensors based on conductive polyurethane sponges coated with hybrid CNT/CB nanoparticles | |
| Shu et al. | Flexible resistive tactile pressure sensors | |
| Qiu et al. | A path beyond metal and silicon: polymer/nanomaterial composites for stretchable strain sensors | |
| Cheng et al. | A highly sensitive piezoresistive sensor with interlocked graphene microarrays for meticulous monitoring of human motions | |
| Wang et al. | Mechanically flexible conductors for stretchable and wearable e‐skin and e‐textile devices | |
| Huang et al. | A unique, flexible, and porous pressure sensor with enhanced sensitivity and durability by synergy of surface microstructure and supercritical fluid foaming | |
| Yang et al. | Flexible, conductive, and highly pressure-sensitive graphene-polyimide foam for pressure sensor application | |
| Chang et al. | A high-sensitivity and low-hysteresis flexible pressure sensor based on carbonized cotton fabric | |
| Yuan et al. | Flexible and breathable strain sensor with high performance based on MXene/nylon fabric network | |
| Li et al. | Design of a wearable and shape-memory fibriform sensor for the detection of multimodal deformation | |
| Yuan et al. | Bending and Stretching‐Insensitive, Crosstalk‐free, flexible pressure sensor arrays for Human‐machine interactions | |
| Tai et al. | Flexible pressure sensing film based on ultra-sensitive SWCNT/PDMS spheres for monitoring human pulse signals | |
| Cheng et al. | Low‐cost, highly sensitive, and flexible piezoresistive pressure sensor characterized by low‐temperature interfacial polymerization of polypyrrole on latex sponge | |
| JP4627661B2 (ja) | カテーテル用圧力センサ | |
| Yang et al. | Construction of laser-induced graphene/silver nanowire composite structures for low-strain, high-sensitivity flexible wearable strain sensors | |
| Zhu et al. | Large‐area hand‐covering elastomeric electronic skin sensor with distributed multifunctional sensing capability | |
| Xue et al. | Wearable and visual pressure sensors based on Zn 2 GeO 4@ polypyrrole nanowire aerogels | |
| Gao et al. | Flexible and sensitive piezoresistive electronic skin based on TOCN/PPy hydrogel films | |
| Yuan et al. | A flexible viscoelastic coupling cable with self-adapted electrical properties and anti-impact performance toward shapeable electronic devices | |
| CN105444928A (zh) | 一种压阻型线状柔性应力传感器的制备方法 | |
| CN113720386A (zh) | 一种测量温度和应变的双模态柔性传感器及其制备方法 | |
| Chen et al. | CNT@ leather-based electronic bidirectional pressure sensor | |
| Oren et al. | Helical-shaped graphene tubular spring formed within microchannel for wearable strain sensor with wide dynamic range | |
| Li et al. | A Seamlessly Integrated Sandwich‐Structured Hydrogel for Supercapacitors and Multimodal Wearable Sensors Enabling Information Transmission |