JP2010208002A - ロボット装置の制御装置及びロボット装置の制御方法 - Google Patents
ロボット装置の制御装置及びロボット装置の制御方法 Download PDFInfo
- Publication number
- JP2010208002A JP2010208002A JP2009059849A JP2009059849A JP2010208002A JP 2010208002 A JP2010208002 A JP 2010208002A JP 2009059849 A JP2009059849 A JP 2009059849A JP 2009059849 A JP2009059849 A JP 2009059849A JP 2010208002 A JP2010208002 A JP 2010208002A
- Authority
- JP
- Japan
- Prior art keywords
- manipulator
- intruding object
- area
- approximate
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 58
- 238000001514 detection method Methods 0.000 claims abstract description 56
- 238000012544 monitoring process Methods 0.000 claims abstract description 19
- 239000007787 solid Substances 0.000 claims description 41
- 238000013459 approach Methods 0.000 claims description 19
- 230000006866 deterioration Effects 0.000 abstract 1
- 238000012806 monitoring device Methods 0.000 description 35
- 238000005259 measurement Methods 0.000 description 32
- 239000002699 waste material Substances 0.000 description 9
- 238000012545 processing Methods 0.000 description 7
- 230000002093 peripheral effect Effects 0.000 description 6
- 238000003466 welding Methods 0.000 description 5
- 238000010422 painting Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 241000282412 Homo Species 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000000452 restraining effect Effects 0.000 description 2
- 210000003423 ankle Anatomy 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000009191 jumping Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 238000012502 risk assessment Methods 0.000 description 1
- 238000004092 self-diagnosis Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images









Landscapes
- Manipulator (AREA)
Abstract
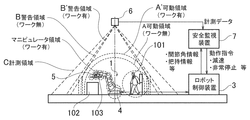
【解決手段】マニピュレータ1の可動領域を包括し可動領域よりも広い領域であって侵入物体101の侵入が可能である警戒領域Bに対する侵入物体101の侵入を監視する侵入検知手段6と、マニピュレータ1の動作状態を特定するとともにマニピュレータ1の動作を制御する制御手段3,7とを備える。制御手段3,7は、検知手段6により、警戒領域B内への侵入物体101の侵入が検知された場合には、マニピュレータ1の動作を減速させ、マニピュレータ1の可動領域A内への侵入物体101の侵入が検知されるとともにマニピュレータ1と侵入物体101との距離が所定の距離以下となったときには、マニピュレータ1の動作を停止させる。
【選択図】図1
Description
マニピュレータを備えたロボット装置の動作を制御するためのロボット装置の制御装置であって、マニピュレータの可動領域を包括し該可動領域よりも広い領域であって侵入物体の侵入が可能である警戒領域に対する侵入物体の侵入を監視する侵入検知手段と、マニピュレータの動作状態を特定するとともに該マニピュレータの動作を制御する制御手段とを備え、制御手段は、検知手段により、警戒領域内への侵入物体の侵入が検知された場合には、マニピュレータの動作を減速させ、マニピュレータの可動領域内への侵入物体の侵入が検知されるとともにマニピュレータと侵入物体との距離が所定の距離以下となったときには、マニピュレータの動作を停止させることを特徴とするものである。
構成1を有するロボット装置の制御装置において、侵入検知手段は、3次元認識センサであって、制御手段は、侵入検知手段による検知結果に基づいて侵入物体を包絡する第1の近似立体を設定するとともに、マニピュレータの構造及び該マニピュレータに対する制御情報に基づいてマニピュレータの動作状態を特定しこのマニピュレータを包絡する第2の近似立体を設定し、これら第1及び第2の近似立体同士の干渉の有無を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成1を有するロボット装置の制御装置において、侵入検知手段は、2次元認識センサ、または、3次元認識センサであって、制御手段は、侵入検知手段による検知結果に基づいて侵入物体の水平面への投影図形を包絡する第1の近似図形を設定するとともに、マニピュレータの構造及び該マニピュレータに対する制御情報に基づいてマニピュレータの動作状態を特定しこのマニピュレータの水平面への投影図形を包絡する第2の近似図形を設定し、これら第1及び第2の近似図形同士の干渉の有無を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成1を有するロボット装置の制御装置において、侵入検知手段は、3次元認識センサであって、制御手段は、侵入検知手段による検知結果に基づいて侵入物体の中心点を設定するとともに、マニピュレータの構造及び該マニピュレータに対する制御情報に基づいてマニピュレータの動作状態を特定しこのマニピュレータの複数の代表点を設定し、これら中心点及び各代表点間の距離を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成1を有するロボット装置の制御装置において、侵入検知手段は、2次元認識センサ、または、3次元認識センサであって、制御手段は、侵入検知手段による検知結果に基づいて侵入物体の水平面への投影図形の中心点及び水平面上において中心点から一定の距離の点を包絡した近似図形を設定するとともに、侵入検知手段によりマニピュレータの動作状態を特定しマニピュレータの水平面への投影図形を設定しこれら近似図形及び投影図形の干渉の有無を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成1、構成2、構成3、または、構成5を有するロボット装置の制御装置において、マニピュレータがワークを把持している場合には、把持されているワークの大きさに応じて、警戒領域、近似立体、または、近似図形を拡大することを特徴とするものである。
構成1、構成2、構成3、または、構成5を有するロボット装置の制御装置において、侵入物体を包括する警戒領域を設定し、この警戒領域及びマニピュレータの可動領域を包括する警戒領域の少なくとも一方について、これら警戒領域よりも狭い一、または、二以上に多重化された危険領域を設定して多重化し、侵入物体領域とマニピュレータとの警戒領域同士が重なった場合には、第1段階の減速を行い、一方の危険領域と他方の警戒領域とが重なった場合には、侵入物体領域とマニピュレータとの接近に応じて順次多段的に減速することを特徴とするものである。
マニピュレータを備えたロボット装置の動作を制御するためのロボット装置の制御方法であって、マニピュレータの可動領域を包括し該可動領域よりも広い領域であって侵入物体の侵入が可能である警戒領域に対する侵入物体の侵入を監視し、警戒領域内への侵入物体の侵入が検知された場合には、マニピュレータの動作を減速させ、マニピュレータの可動領域内への侵入物体の侵入が検知されるとともにマニピュレータと侵入物体との距離が所定の距離以下となったときには、マニピュレータの動作を停止させることを特徴とするものである。
構成8を有するロボット装置の制御方法において、侵入物体の監視結果に基づいて侵入物体を包絡する第1の近似立体を設定するとともに、マニピュレータの構造及び該マニピュレータに対する制御情報に基づいてマニピュレータの動作状態を特定しこのマニピュレータを包絡する第2の近似立体を設定し、これら第1及び第2の近似立体同士の干渉の有無を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成8を有するロボット装置の制御方法において、侵入物体の監視結果に基づいて侵入物体の水平面への投影図形を包絡する第1の近似図形を設定するとともに、マニピュレータの構造及び該マニピュレータに対する制御情報に基づいてマニピュレータの動作状態を特定しこのマニピュレータの水平面への投影図形を包絡する第2の近似図形を設定し、これら第1及び第2の近似図形同士の干渉の有無を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成8を有するロボット装置の制御方法において、侵入物体の監視結果に基づいて侵入物体の中心点を設定するとともに、マニピュレータの構造及び該マニピュレータに対する制御情報に基づいてマニピュレータの動作状態を特定しこのマニピュレータの複数の代表点を設定し、これら中心点及び各代表点間の距離を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成8を有するロボット装置の制御方法において、侵入物体の監視結果に基づいて侵入物体の水平面への投影図形の中心点及び水平面上において中心点から一定の距離の点を包絡した近似図形を設定するとともに、マニピュレータを監視することによりマニピュレータの動作状態を特定しマニピュレータの水平面への投影図形を設定し、これら近似図形及び投影図形の干渉の有無を判定することにより、マニピュレータと侵入物体との距離が所定の距離以下となったことを判別することを特徴とするものである。
構成8、構成9、構成10、または、構成12を有するロボット装置の制御方法において、マニピュレータがワークを把持している場合には、把持されているワークの大きさに応じて、警戒領域、近似立体、または、近似図形を拡大することを特徴とするものである。
構成8、構成9、構成10、または、構成12を有するロボット装置の制御方法において、侵入物体を包括する警戒領域を設定し、この警戒領域及びマニピュレータの可動領域を包括する警戒領域の少なくとも一方について、これら警戒領域よりも狭い一、または、二以上に多重化された危険領域を設定して多重化し、侵入物体領域とマニピュレータとの警戒領域同士が重なった場合には、第1段階の減速を行い、一方の危険領域と他方の警戒領域とが重なった場合には、侵入物体領域とマニピュレータとの接近に応じて順次多段的に減速することを特徴とするものである。
図1は、本発明に係るロボット装置の制御装置の構成を示す模式的な側面図である。
本発明に係るロボット装置の制御方法は、本発明に係るロボット装置の制御装置を動作させることによって実施される。このロボット装置の制御方法は、ロボット装置の通常の運転中だけではなく、調整、試験、メンテナンス、教示、検査等を含む種々の作業中にも実施することができる。
図4は、本発明に係るロボット装置の制御装置の第2の実施の形態における構成を示す模式的な側面図である。
図5は、本発明に係るロボット装置の制御装置の第3の実施の形態における構成を示す模式的な側面図である。
前述の実施の形態においては、侵入検知手段となる3次元センサ6して、レーザレーダ(レーザレンジファインダ)を例示しているが、3次元センサ6としては、ステレオカメラ等を用いることもできる。
図6は、侵入物体領域を多重化した第5の実施の形態を示す側面図である。
図7は、本発明に係るロボット装置の制御装置の第6の実施の形態における構成を示す模式的な側面図及び平面図である。
図9は、本発明に係るロボット装置の制御装置の第7の実施の形態における構成を示す模式的な側面図及び平面図である。
図10は、本発明に係るロボット装置の制御装置の第8の実施の形態における構成を示す模式的な側面図及び平面図である。
3 ロボット制御装置
4 ロボット基台部
5 先端ツール機構
6 3次元センサ
7 安全監視装置
101 侵入物体
Claims (14)
- マニピュレータを備えたロボット装置の動作を制御するためのロボット装置の制御装置であって、
前記マニピュレータの可動領域を包括し該可動領域よりも広い領域であって、侵入物体の侵入が可能である警戒領域に対する前記侵入物体の侵入を監視する侵入検知手段と、
前記マニピュレータの動作状態を特定するとともに、該マニピュレータの動作を制御する制御手段と
を備え、
前記制御手段は、前記検知手段により、前記警戒領域内への前記侵入物体の侵入が検知された場合には、前記マニピュレータの動作を減速させ、前記マニピュレータの可動領域内への前記侵入物体の侵入が検知されるとともに、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったときには、前記マニピュレータの動作を停止させる
ことを特徴とするロボット装置の制御装置。 - 前記侵入検知手段は、3次元認識センサであって、
前記制御手段は、前記侵入検知手段による検知結果に基づいて前記侵入物体を包絡する第1の近似立体を設定するとともに、前記マニピュレータの構造及び該マニピュレータに対する制御情報に基づいて前記マニピュレータの動作状態を特定し、このマニピュレータを包絡する第2の近似立体を設定し、これら第1及び第2の近似立体同士の干渉の有無を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項1記載のロボット装置の制御装置。 - 前記侵入検知手段は、2次元認識センサ、または、3次元認識センサであって、
前記制御手段は、前記侵入検知手段による検知結果に基づいて前記侵入物体の水平面への投影図形を包絡する第1の近似図形を設定するとともに、前記マニピュレータの構造及び該マニピュレータに対する制御情報に基づいて前記マニピュレータの動作状態を特定し、このマニピュレータの水平面への投影図形を包絡する第2の近似図形を設定し、これら第1及び第2の近似図形同士の干渉の有無を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項1記載のロボット装置の制御装置。 - 前記侵入検知手段は、3次元認識センサであって、
前記制御手段は、前記侵入検知手段による検知結果に基づいて前記侵入物体の中心点を設定するとともに、前記マニピュレータの構造及び該マニピュレータに対する制御情報に基づいて前記マニピュレータの動作状態を特定し、このマニピュレータの複数の代表点を設定し、これら中心点及び各代表点間の距離を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項1記載のロボット装置の制御装置。 - 前記侵入検知手段は、2次元認識センサ、または、3次元認識センサであって、
前記制御手段は、前記侵入検知手段による検知結果に基づいて前記侵入物体の水平面への投影図形の中心点及び水平面上において前記中心点から一定の距離の点を包絡した近似図形を設定するとともに、前記侵入検知手段により前記マニピュレータの動作状態を特定し前記マニピュレータの水平面への投影図形を設定し、これら近似図形及び投影図形の干渉の有無を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項1記載のロボット装置の制御装置。 - 前記マニピュレータがワークを把持している場合には、把持されているワークの大きさに応じて、前記警戒領域、前記近似立体、または、前記近似図形を拡大する
ことを特徴とする請求項1、請求項2、請求項3、または、請求項5記載のロボット装置の制御装置。 - 前記侵入物体を包括する警戒領域を設定し、この警戒領域及び前記マニピュレータの可動領域を包括する前記警戒領域の少なくとも一方について、これら警戒領域よりも狭い一、または、二以上に多重化された危険領域を設定して多重化し、
前記侵入物体領域と前記マニピュレータとの警戒領域同士が重なった場合には、第1段階の減速を行い、一方の危険領域と他方の警戒領域とが重なった場合には、前記侵入物体領域と前記マニピュレータとの接近に応じて順次多段的に減速する
ことを特徴とする請求項1、請求項2、請求項3、または、請求項5記載のロボット装置の制御装置。 - マニピュレータを備えたロボット装置の動作を制御するためのロボット装置の制御方法であって、
前記マニピュレータの可動領域を包括し該可動領域よりも広い領域であって、侵入物体の侵入が可能である警戒領域に対する前記侵入物体の侵入を監視し、
前記警戒領域内への前記侵入物体の侵入が検知された場合には、前記マニピュレータの動作を減速させ、前記マニピュレータの可動領域内への前記侵入物体の侵入が検知されるとともに、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったときには、前記マニピュレータの動作を停止させる
ことを特徴とするロボット装置の制御方法。 - 前記侵入物体の監視結果に基づいて、前記侵入物体を包絡する第1の近似立体を設定するとともに、前記マニピュレータの構造及び該マニピュレータに対する制御情報に基づいて前記マニピュレータの動作状態を特定し、このマニピュレータを包絡する第2の近似立体を設定し、これら第1及び第2の近似立体同士の干渉の有無を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項8記載のロボット装置の制御方法。 - 前記侵入物体の監視結果に基づいて、前記侵入物体の水平面への投影図形を包絡する第1の近似図形を設定するとともに、前記マニピュレータの構造及び該マニピュレータに対する制御情報に基づいて前記マニピュレータの動作状態を特定し、このマニピュレータの水平面への投影図形を包絡する第2の近似図形を設定し、これら第1及び第2の近似図形同士の干渉の有無を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項8記載のロボット装置の制御方法。 - 前記侵入物体の監視結果に基づいて、前記侵入物体の中心点を設定するとともに、前記マニピュレータの構造及び該マニピュレータに対する制御情報に基づいて前記マニピュレータの動作状態を特定し、このマニピュレータの複数の代表点を設定し、これら中心点及び各代表点間の距離を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項8記載のロボット装置の制御方法。 - 前記侵入物体の監視結果に基づいて、前記侵入物体の水平面への投影図形の中心点及び水平面上において前記中心点から一定の距離の点を包絡した近似図形を設定するとともに、前記マニピュレータを監視することにより前記マニピュレータの動作状態を特定し前記マニピュレータの水平面への投影図形を設定し、これら近似図形及び投影図形の干渉の有無を判定することにより、前記マニピュレータと前記侵入物体との距離が所定の距離以下となったことを判別する
ことを特徴とする請求項8記載のロボット装置の制御方法。 - 前記マニピュレータがワークを把持している場合には、把持されているワークの大きさに応じて、前記警戒領域、前記近似立体、または、前記近似図形を拡大する
ことを特徴とする請求項8、請求項9、請求項10、または、請求項12記載のロボット装置の制御方法。 - 前記侵入物体を包括する警戒領域を設定し、この警戒領域及び前記マニピュレータの可動領域を包括する前記警戒領域の少なくとも一方について、これら警戒領域よりも狭い一、または、二以上に多重化された危険領域を設定して多重化し、
前記侵入物体領域と前記マニピュレータとの警戒領域同士が重なった場合には、第1段階の減速を行い、一方の危険領域と他方の警戒領域とが重なった場合には、前記侵入物体領域と前記マニピュレータとの接近に応じて順次多段的に減速する
ことを特徴とする請求項8、請求項9、請求項10、または、請求項12記載のロボット装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009059849A JP5343641B2 (ja) | 2009-03-12 | 2009-03-12 | ロボット装置の制御装置及びロボット装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009059849A JP5343641B2 (ja) | 2009-03-12 | 2009-03-12 | ロボット装置の制御装置及びロボット装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010208002A true JP2010208002A (ja) | 2010-09-24 |
| JP5343641B2 JP5343641B2 (ja) | 2013-11-13 |
Family
ID=42968749
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009059849A Active JP5343641B2 (ja) | 2009-03-12 | 2009-03-12 | ロボット装置の制御装置及びロボット装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5343641B2 (ja) |
Cited By (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011125975A (ja) * | 2009-12-18 | 2011-06-30 | Denso Wave Inc | ロボットの干渉回避装置 |
| JP2012223831A (ja) * | 2011-04-15 | 2012-11-15 | Mitsubishi Electric Corp | 衝突回避装置 |
| CN103226885A (zh) * | 2012-01-30 | 2013-07-31 | 精工爱普生株式会社 | 侵入检测装置、机械手以及侵入检测方法 |
| WO2013140579A1 (ja) * | 2012-03-22 | 2013-09-26 | 株式会社安川電機 | 作業ロボットおよびロボットシステム |
| WO2013140514A1 (ja) * | 2012-03-19 | 2013-09-26 | 株式会社安川電機 | 作業ロボットおよびロボットシステム |
| JP2013545625A (ja) * | 2010-12-16 | 2013-12-26 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 操作装置のため、特に産業用ロボットのための安全装置、並びに、安全装置の動作方法 |
| JP2014140920A (ja) * | 2013-01-23 | 2014-08-07 | Denso Wave Inc | ロボット周辺への物体の侵入を監視する監視システムおよび監視方法 |
| JP2014148027A (ja) * | 2013-02-04 | 2014-08-21 | Seiko Epson Corp | 警報装置 |
| US20140277724A1 (en) * | 2013-03-15 | 2014-09-18 | Kabushiki Kaisha Yaskawa Denki | Robot system and method for controlling robot system |
| JP2014180723A (ja) * | 2013-03-19 | 2014-09-29 | Yaskawa Electric Corp | ロボットシステム及び被加工物の製造方法 |
| JP2014180724A (ja) * | 2013-03-19 | 2014-09-29 | Yaskawa Electric Corp | ロボットシステム及び被加工物の製造方法 |
| WO2014173725A1 (de) * | 2013-04-26 | 2014-10-30 | Pilz Gmbh & Co. Kg | Vorrichtung und verfahren zum absichern einer automatisiert arbeitenden maschine |
| JP2015515613A (ja) * | 2012-03-16 | 2015-05-28 | ピルツ ゲーエムベーハー アンド コー.カーゲー | 自動機械の危険な作業区域の安全を守るための方法および装置 |
| JP2016078184A (ja) * | 2014-10-17 | 2016-05-16 | ファナック株式会社 | ロボットの干渉領域設定装置 |
| JP2016087785A (ja) * | 2014-11-07 | 2016-05-23 | コマウ・ソシエタ・ペル・アチオニComau Societa Per Azioni | 産業用ロボット及び産業用ロボットの制御方法 |
| WO2016103308A1 (ja) * | 2014-12-26 | 2016-06-30 | 川崎重工業株式会社 | ロボットシステム |
| JP2016137544A (ja) * | 2015-01-27 | 2016-08-04 | ファナック株式会社 | ロボットの設置台の輝度が変化するロボットシステム |
| KR101725177B1 (ko) * | 2016-02-19 | 2017-04-10 | 하이윈 테크놀로지스 코포레이션 | 로봇 안전 보호 장치 |
| DE102016122650A1 (de) | 2015-12-29 | 2017-06-29 | Hiwin Technologies Corp. | Robotersicherheitssystem |
| JP2017520419A (ja) * | 2014-07-02 | 2017-07-27 | シーメンス アクチエンゲゼルシヤフトSiemens Aktiengesellschaft | 警報方法およびロボットシステム |
| JP2017177283A (ja) * | 2016-03-30 | 2017-10-05 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびシミュレーション装置 |
| ITUA20163608A1 (it) * | 2016-05-19 | 2017-11-19 | Milano Politecnico | Procedimento e dispositivo per il controllo della movimentazione di uno o più robot collaborativi |
| JP2018130793A (ja) * | 2017-02-15 | 2018-08-23 | オムロン株式会社 | 監視システム、監視装置、および監視方法 |
| JP2018147179A (ja) * | 2017-03-03 | 2018-09-20 | Idec株式会社 | リスクアセスメント支援方法およびリスクアセスメント支援プログラム |
| CN108568815A (zh) * | 2017-03-13 | 2018-09-25 | 发那科株式会社 | 机器人系统和机器人控制方法 |
| JP2018176397A (ja) * | 2017-04-21 | 2018-11-15 | オムロン株式会社 | ロボットシステム |
| US20180336402A1 (en) * | 2017-05-17 | 2018-11-22 | Fanuc Corporation | Monitor apparatus for monitoring spatial region set by dividing monitor region |
| CN108858181A (zh) * | 2017-05-16 | 2018-11-23 | 欧姆龙株式会社 | 机器人系统 |
| US10213916B2 (en) | 2016-03-23 | 2019-02-26 | Seiko Epson Corporation | Control apparatus and robot system |
| CN110026977A (zh) * | 2018-01-12 | 2019-07-19 | 株式会社日立制作所 | 机器人控制装置及自动组装系统 |
| DE102019001036A1 (de) | 2018-02-19 | 2019-08-22 | Fanuc Corporation | Objektüberwachungsvorrichtung, die einen Sensor verwendet |
| JP2019193974A (ja) * | 2019-06-11 | 2019-11-07 | ファナック株式会社 | ロボットシステムおよびロボット制御方法 |
| WO2019240051A1 (ja) * | 2018-06-11 | 2019-12-19 | パナソニックIpマネジメント株式会社 | 測距システム及び測距方法 |
| JP2020049623A (ja) * | 2018-09-28 | 2020-04-02 | Idec株式会社 | 安全制御システム |
| US10618170B2 (en) | 2017-02-17 | 2020-04-14 | Fanuc Corporation | Robot system |
| JP2020097091A (ja) * | 2018-12-14 | 2020-06-25 | オムロン株式会社 | ロボット干渉判定装置、ロボット干渉判定方法、ロボット制御装置、ロボット制御システム、人動作予測装置、および人動作予測方法 |
| JP2020097088A (ja) * | 2018-12-19 | 2020-06-25 | ファナック株式会社 | ロボット制御装置、ロボット制御システム、及びロボット制御方法 |
| JP2020138247A (ja) * | 2019-02-27 | 2020-09-03 | セイコーエプソン株式会社 | ロボットシステム |
| JP2020529932A (ja) * | 2017-08-07 | 2020-10-15 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 少なくとも1つの作業ステップを実行するためのハンドリング装置を有するハンドリングアセンブリ、方法及びコンピュータプログラム |
| WO2020240977A1 (ja) | 2019-05-28 | 2020-12-03 | オムロン株式会社 | 安全監視システム、安全監視制御装置、および安全監視方法 |
| WO2021033355A1 (ja) | 2019-08-21 | 2021-02-25 | オムロン株式会社 | ロボットの制御装置、ロボットの制御方法、及びプログラム |
| JP2021035705A (ja) * | 2019-08-30 | 2021-03-04 | Johnan株式会社 | 制御装置、制御方法およびプログラム |
| DE102016010284B4 (de) | 2015-08-31 | 2021-09-02 | Fanuc Corporation | Robotersystem, das einen Sichtsensor verwendet |
| JP2021126767A (ja) * | 2017-02-07 | 2021-09-02 | ヴェオ ロボティクス, インコーポレイテッド | 作業空間安全監視および機器制御 |
| DE102018004584B4 (de) | 2017-07-19 | 2021-11-18 | Fanuc Corporation | Bearbeitungssystem |
| JP2021534010A (ja) * | 2018-08-30 | 2021-12-09 | ヴェオ ロボティクス, インコーポレイテッド | 安全重視用途に関する産業ロボット動力学のシステム識別 |
| US11235469B2 (en) | 2018-06-26 | 2022-02-01 | Seiko Epson Corporation | Robot controller and robot system |
| CN114027968A (zh) * | 2021-11-30 | 2022-02-11 | 深圳市联影高端医疗装备创新研究院 | 手术设备、电外科手术装置和手术设备的安全检测方法 |
| US11420330B2 (en) | 2016-03-25 | 2022-08-23 | Seiko Epson Corporation | Robot control device, robot, and simulation device |
| EP4088887A1 (en) * | 2021-05-13 | 2022-11-16 | OMRON Corporation | Area setting device, rack, control system, area setting method, and program |
| US11820025B2 (en) | 2017-02-07 | 2023-11-21 | Veo Robotics, Inc. | Safe motion planning for machinery operation |
| US12030186B2 (en) | 2018-10-11 | 2024-07-09 | Sony Corporation | Control device, control method, and non-transitory computer readable storage medium |
| KR102902119B1 (ko) * | 2024-10-30 | 2025-12-22 | 주식회사 브릴스 | 충돌방지 안전 관제 시스템 |
| JP7832421B1 (ja) * | 2025-04-24 | 2026-03-17 | ファナック株式会社 | ロボットの動作を制御する制御装置及び方法、進入監視機能を設定する装置及び方法、並びに、コンピュータプログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12459123B2 (en) | 2022-02-16 | 2025-11-04 | Mantis Robotics, Inc. | Robot system with object detecting sensors |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61206002A (ja) * | 1985-03-11 | 1986-09-12 | Hitachi Seiki Co Ltd | ロボツトの安全装置 |
| JP2678005B2 (ja) * | 1988-03-04 | 1997-11-17 | ファナック株式会社 | ロボットの干渉チェック方法 |
| JPH11226889A (ja) * | 1998-02-16 | 1999-08-24 | Shinko Electric Co Ltd | 作業装置 |
| JP2000202790A (ja) * | 1999-01-14 | 2000-07-25 | Sharp Corp | ロボット装置 |
| JP2003222295A (ja) * | 2001-10-24 | 2003-08-08 | Sick Ag | 機械の保安関連機能を制御する方法及び装置 |
| JP2004243427A (ja) * | 2003-02-12 | 2004-09-02 | Yaskawa Electric Corp | ロボット制御装置およびロボット制御方法 |
| JP3704706B2 (ja) * | 2002-03-13 | 2005-10-12 | オムロン株式会社 | 三次元監視装置 |
| JP2006501487A (ja) * | 2002-09-24 | 2006-01-12 | ピルツ ゲーエムベーハー アンド コー.カーゲー | 危険領域を保護する方法および装置 |
| JP2006043861A (ja) * | 2004-08-09 | 2006-02-16 | Honda Motor Co Ltd | マン・マシン作業システム |
| JP2007283450A (ja) * | 2006-04-18 | 2007-11-01 | National Institute Of Advanced Industrial & Technology | 人間ロボット共存作業用安全装置 |
| JP2008279524A (ja) * | 2007-05-08 | 2008-11-20 | Ihi Corp | 複数ロボットの衝突検知方法及びロボット装置 |
-
2009
- 2009-03-12 JP JP2009059849A patent/JP5343641B2/ja active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61206002A (ja) * | 1985-03-11 | 1986-09-12 | Hitachi Seiki Co Ltd | ロボツトの安全装置 |
| JP2678005B2 (ja) * | 1988-03-04 | 1997-11-17 | ファナック株式会社 | ロボットの干渉チェック方法 |
| JPH11226889A (ja) * | 1998-02-16 | 1999-08-24 | Shinko Electric Co Ltd | 作業装置 |
| JP2000202790A (ja) * | 1999-01-14 | 2000-07-25 | Sharp Corp | ロボット装置 |
| JP2003222295A (ja) * | 2001-10-24 | 2003-08-08 | Sick Ag | 機械の保安関連機能を制御する方法及び装置 |
| JP3704706B2 (ja) * | 2002-03-13 | 2005-10-12 | オムロン株式会社 | 三次元監視装置 |
| JP2006501487A (ja) * | 2002-09-24 | 2006-01-12 | ピルツ ゲーエムベーハー アンド コー.カーゲー | 危険領域を保護する方法および装置 |
| JP2004243427A (ja) * | 2003-02-12 | 2004-09-02 | Yaskawa Electric Corp | ロボット制御装置およびロボット制御方法 |
| JP2006043861A (ja) * | 2004-08-09 | 2006-02-16 | Honda Motor Co Ltd | マン・マシン作業システム |
| JP2007283450A (ja) * | 2006-04-18 | 2007-11-01 | National Institute Of Advanced Industrial & Technology | 人間ロボット共存作業用安全装置 |
| JP2008279524A (ja) * | 2007-05-08 | 2008-11-20 | Ihi Corp | 複数ロボットの衝突検知方法及びロボット装置 |
Cited By (105)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011125975A (ja) * | 2009-12-18 | 2011-06-30 | Denso Wave Inc | ロボットの干渉回避装置 |
| JP2013545625A (ja) * | 2010-12-16 | 2013-12-26 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 操作装置のため、特に産業用ロボットのための安全装置、並びに、安全装置の動作方法 |
| US9475200B2 (en) | 2010-12-16 | 2016-10-25 | Robert Bosch Gmbh | Safety device for a handling apparatus, in particular an industrial robot, and method for operating the safety device |
| JP2012223831A (ja) * | 2011-04-15 | 2012-11-15 | Mitsubishi Electric Corp | 衝突回避装置 |
| CN103226885A (zh) * | 2012-01-30 | 2013-07-31 | 精工爱普生株式会社 | 侵入检测装置、机械手以及侵入检测方法 |
| JP2015515613A (ja) * | 2012-03-16 | 2015-05-28 | ピルツ ゲーエムベーハー アンド コー.カーゲー | 自動機械の危険な作業区域の安全を守るための方法および装置 |
| WO2013140514A1 (ja) * | 2012-03-19 | 2013-09-26 | 株式会社安川電機 | 作業ロボットおよびロボットシステム |
| CN104169051A (zh) * | 2012-03-19 | 2014-11-26 | 株式会社安川电机 | 作业机器人及机器人系统 |
| WO2013140579A1 (ja) * | 2012-03-22 | 2013-09-26 | 株式会社安川電機 | 作業ロボットおよびロボットシステム |
| CN104203505A (zh) * | 2012-03-22 | 2014-12-10 | 株式会社安川电机 | 作业机器人及机器人系统 |
| US10081107B2 (en) | 2013-01-23 | 2018-09-25 | Denso Wave Incorporated | System and method for monitoring entry of object into surrounding area of robot |
| JP2014140920A (ja) * | 2013-01-23 | 2014-08-07 | Denso Wave Inc | ロボット周辺への物体の侵入を監視する監視システムおよび監視方法 |
| JP2014148027A (ja) * | 2013-02-04 | 2014-08-21 | Seiko Epson Corp | 警報装置 |
| JP2014176933A (ja) * | 2013-03-15 | 2014-09-25 | Yaskawa Electric Corp | ロボットシステム、及び、ロボットシステムの制御方法 |
| US20140277724A1 (en) * | 2013-03-15 | 2014-09-18 | Kabushiki Kaisha Yaskawa Denki | Robot system and method for controlling robot system |
| US9162359B2 (en) | 2013-03-15 | 2015-10-20 | Kabushiki Kaisha Yaskawa Denki | Robot system and method for controlling robot system |
| JP2014180724A (ja) * | 2013-03-19 | 2014-09-29 | Yaskawa Electric Corp | ロボットシステム及び被加工物の製造方法 |
| JP2014180723A (ja) * | 2013-03-19 | 2014-09-29 | Yaskawa Electric Corp | ロボットシステム及び被加工物の製造方法 |
| WO2014173725A1 (de) * | 2013-04-26 | 2014-10-30 | Pilz Gmbh & Co. Kg | Vorrichtung und verfahren zum absichern einer automatisiert arbeitenden maschine |
| US10302251B2 (en) | 2013-04-26 | 2019-05-28 | Pilz Gmbh & Co. Kg | Apparatus and method for safeguarding an automatically operating machine |
| JP2017520419A (ja) * | 2014-07-02 | 2017-07-27 | シーメンス アクチエンゲゼルシヤフトSiemens Aktiengesellschaft | 警報方法およびロボットシステム |
| JP2016078184A (ja) * | 2014-10-17 | 2016-05-16 | ファナック株式会社 | ロボットの干渉領域設定装置 |
| US9584796B2 (en) | 2014-10-17 | 2017-02-28 | Fanuc Corporation | Apparatus for setting interference region of robot |
| JP2016087785A (ja) * | 2014-11-07 | 2016-05-23 | コマウ・ソシエタ・ペル・アチオニComau Societa Per Azioni | 産業用ロボット及び産業用ロボットの制御方法 |
| CN107107349B (zh) * | 2014-12-26 | 2019-11-22 | 川崎重工业株式会社 | 机械臂系统 |
| WO2016103308A1 (ja) * | 2014-12-26 | 2016-06-30 | 川崎重工業株式会社 | ロボットシステム |
| JPWO2016103308A1 (ja) * | 2014-12-26 | 2017-06-15 | 川崎重工業株式会社 | ロボットシステム |
| CN107107349A (zh) * | 2014-12-26 | 2017-08-29 | 川崎重工业株式会社 | 机械臂系统 |
| US10345788B2 (en) | 2014-12-26 | 2019-07-09 | Kawasaki Jukogyo Kabushiki Kaisha | Robot system |
| US9764474B2 (en) | 2015-01-27 | 2017-09-19 | Fanuc Corporation | Robot system in which brightness of installation table for robot is changed |
| JP2016137544A (ja) * | 2015-01-27 | 2016-08-04 | ファナック株式会社 | ロボットの設置台の輝度が変化するロボットシステム |
| DE102016010284B4 (de) | 2015-08-31 | 2021-09-02 | Fanuc Corporation | Robotersystem, das einen Sichtsensor verwendet |
| DE102016122650B4 (de) | 2015-12-29 | 2022-05-25 | Hiwin Technologies Corp. | Robotersicherheitssystem |
| DE102016122650A1 (de) | 2015-12-29 | 2017-06-29 | Hiwin Technologies Corp. | Robotersicherheitssystem |
| KR101725177B1 (ko) * | 2016-02-19 | 2017-04-10 | 하이윈 테크놀로지스 코포레이션 | 로봇 안전 보호 장치 |
| US10213916B2 (en) | 2016-03-23 | 2019-02-26 | Seiko Epson Corporation | Control apparatus and robot system |
| US11420330B2 (en) | 2016-03-25 | 2022-08-23 | Seiko Epson Corporation | Robot control device, robot, and simulation device |
| JP2017177283A (ja) * | 2016-03-30 | 2017-10-05 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびシミュレーション装置 |
| WO2017199196A1 (en) * | 2016-05-19 | 2017-11-23 | Politecnico Di Milano | Method and device for controlling the motion of one or more collaborative robots |
| US11110605B2 (en) | 2016-05-19 | 2021-09-07 | Politecnico Di Milano | Method and device for controlling the motion of one or more collaborative robots |
| ITUA20163608A1 (it) * | 2016-05-19 | 2017-11-19 | Milano Politecnico | Procedimento e dispositivo per il controllo della movimentazione di uno o più robot collaborativi |
| US12036683B2 (en) | 2017-02-07 | 2024-07-16 | Veo Robotics, Inc. | Safe motion planning for machinery operation |
| US11820025B2 (en) | 2017-02-07 | 2023-11-21 | Veo Robotics, Inc. | Safe motion planning for machinery operation |
| EP4088891A1 (en) * | 2017-02-07 | 2022-11-16 | Veo Robotics, Inc. | Workspace safety monitoring and equipment control |
| JP7122776B2 (ja) | 2017-02-07 | 2022-08-22 | ヴェオ ロボティクス, インコーポレイテッド | 作業空間安全監視および機器制御 |
| US12397434B2 (en) | 2017-02-07 | 2025-08-26 | Symbotic Llc | Safe motion planning for machinery operation |
| JP2021126767A (ja) * | 2017-02-07 | 2021-09-02 | ヴェオ ロボティクス, インコーポレイテッド | 作業空間安全監視および機器制御 |
| JP2018130793A (ja) * | 2017-02-15 | 2018-08-23 | オムロン株式会社 | 監視システム、監視装置、および監視方法 |
| US10618170B2 (en) | 2017-02-17 | 2020-04-14 | Fanuc Corporation | Robot system |
| JP2018147179A (ja) * | 2017-03-03 | 2018-09-20 | Idec株式会社 | リスクアセスメント支援方法およびリスクアセスメント支援プログラム |
| US10695909B2 (en) | 2017-03-13 | 2020-06-30 | Fanuc Corporation | Robot system and robot control method |
| JP2018149627A (ja) * | 2017-03-13 | 2018-09-27 | ファナック株式会社 | ロボットシステムおよびロボット制御方法 |
| CN108568815B (zh) * | 2017-03-13 | 2020-07-14 | 发那科株式会社 | 机器人系统和机器人控制方法 |
| CN108568815A (zh) * | 2017-03-13 | 2018-09-25 | 发那科株式会社 | 机器人系统和机器人控制方法 |
| JP2018176397A (ja) * | 2017-04-21 | 2018-11-15 | オムロン株式会社 | ロボットシステム |
| CN108858181A (zh) * | 2017-05-16 | 2018-11-23 | 欧姆龙株式会社 | 机器人系统 |
| JP2018192556A (ja) * | 2017-05-16 | 2018-12-06 | オムロン株式会社 | ロボットシステム |
| JP2018195959A (ja) * | 2017-05-17 | 2018-12-06 | ファナック株式会社 | 監視領域を分割した空間領域を監視する監視装置 |
| US10482322B2 (en) | 2017-05-17 | 2019-11-19 | Fanuc Corporation | Monitor apparatus for monitoring spatial region set by dividing monitor region |
| US20180336402A1 (en) * | 2017-05-17 | 2018-11-22 | Fanuc Corporation | Monitor apparatus for monitoring spatial region set by dividing monitor region |
| DE102018004584B4 (de) | 2017-07-19 | 2021-11-18 | Fanuc Corporation | Bearbeitungssystem |
| US11478932B2 (en) | 2017-08-07 | 2022-10-25 | Robert Bosch Gmbh | Handling assembly comprising a handling device for carrying out at least one work step, method, and computer program |
| JP2020529932A (ja) * | 2017-08-07 | 2020-10-15 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 少なくとも1つの作業ステップを実行するためのハンドリング装置を有するハンドリングアセンブリ、方法及びコンピュータプログラム |
| JP7058126B2 (ja) | 2018-01-12 | 2022-04-21 | 株式会社日立製作所 | ロボット制御装置および自動組立システム |
| CN110026977B (zh) * | 2018-01-12 | 2022-03-29 | 株式会社日立制作所 | 机器人控制装置及自动组装系统 |
| JP2019123022A (ja) * | 2018-01-12 | 2019-07-25 | 株式会社日立製作所 | ロボット制御装置および自動組立システム |
| CN110026977A (zh) * | 2018-01-12 | 2019-07-19 | 株式会社日立制作所 | 机器人控制装置及自动组装系统 |
| DE102019001036B4 (de) | 2018-02-19 | 2022-08-04 | Fanuc Corporation | Objektüberwachungsvorrichtung, die einen Sensor verwendet |
| DE102019001036A1 (de) | 2018-02-19 | 2019-08-22 | Fanuc Corporation | Objektüberwachungsvorrichtung, die einen Sensor verwendet |
| WO2019240051A1 (ja) * | 2018-06-11 | 2019-12-19 | パナソニックIpマネジメント株式会社 | 測距システム及び測距方法 |
| JPWO2019240051A1 (ja) * | 2018-06-11 | 2021-06-24 | パナソニックIpマネジメント株式会社 | 測距システム及び測距方法 |
| JP7398658B2 (ja) | 2018-06-11 | 2023-12-15 | パナソニックIpマネジメント株式会社 | 測距システム及び測距方法 |
| CN112262028A (zh) * | 2018-06-11 | 2021-01-22 | 松下知识产权经营株式会社 | 测距系统及测距方法 |
| CN112262028B (zh) * | 2018-06-11 | 2024-03-15 | 松下知识产权经营株式会社 | 测距系统及测距方法 |
| US11235469B2 (en) | 2018-06-26 | 2022-02-01 | Seiko Epson Corporation | Robot controller and robot system |
| JP2021534010A (ja) * | 2018-08-30 | 2021-12-09 | ヴェオ ロボティクス, インコーポレイテッド | 安全重視用途に関する産業ロボット動力学のシステム識別 |
| US11766780B2 (en) | 2018-08-30 | 2023-09-26 | Veo Robotics, Inc. | System identification of industrial robot dynamics for safety-critical applications |
| JP7262847B2 (ja) | 2018-08-30 | 2023-04-24 | ヴェオ ロボティクス, インコーポレイテッド | 安全重視用途に関する産業ロボット動力学のシステム識別 |
| JP7401965B2 (ja) | 2018-09-28 | 2023-12-20 | Idec株式会社 | 安全制御システム |
| JP2020049623A (ja) * | 2018-09-28 | 2020-04-02 | Idec株式会社 | 安全制御システム |
| US12030186B2 (en) | 2018-10-11 | 2024-07-09 | Sony Corporation | Control device, control method, and non-transitory computer readable storage medium |
| JP7462195B2 (ja) | 2018-12-14 | 2024-04-05 | オムロン株式会社 | ロボット干渉判定装置、ロボット干渉判定方法、ロボット制御装置、ロボット制御システム、人動作予測装置、および人動作予測方法 |
| JP7243979B2 (ja) | 2018-12-14 | 2023-03-22 | オムロン株式会社 | ロボット干渉判定装置、ロボット干渉判定方法、ロボット制御装置、ロボット制御システム、人動作予測装置、および人動作予測方法 |
| JP2020097091A (ja) * | 2018-12-14 | 2020-06-25 | オムロン株式会社 | ロボット干渉判定装置、ロボット干渉判定方法、ロボット制御装置、ロボット制御システム、人動作予測装置、および人動作予測方法 |
| JP2023029629A (ja) * | 2018-12-14 | 2023-03-03 | オムロン株式会社 | ロボット干渉判定装置、ロボット干渉判定方法、ロボット制御装置、ロボット制御システム、人動作予測装置、および人動作予測方法 |
| US11345036B2 (en) | 2018-12-19 | 2022-05-31 | Fanuc Corporation | Robot control device, robot control system, and robot control method |
| JP6997068B2 (ja) | 2018-12-19 | 2022-01-17 | ファナック株式会社 | ロボット制御装置、ロボット制御システム、及びロボット制御方法 |
| JP2020097088A (ja) * | 2018-12-19 | 2020-06-25 | ファナック株式会社 | ロボット制御装置、ロボット制御システム、及びロボット制御方法 |
| US11345034B2 (en) | 2019-02-27 | 2022-05-31 | Seiko Epson Corporation | Robot system |
| JP2020138247A (ja) * | 2019-02-27 | 2020-09-03 | セイコーエプソン株式会社 | ロボットシステム |
| JP7207010B2 (ja) | 2019-02-27 | 2023-01-18 | セイコーエプソン株式会社 | ロボットシステム及びその制御方法 |
| WO2020240977A1 (ja) | 2019-05-28 | 2020-12-03 | オムロン株式会社 | 安全監視システム、安全監視制御装置、および安全監視方法 |
| JP2019193974A (ja) * | 2019-06-11 | 2019-11-07 | ファナック株式会社 | ロボットシステムおよびロボット制御方法 |
| JP7346997B2 (ja) | 2019-08-21 | 2023-09-20 | オムロン株式会社 | ロボットの制御装置、ロボットの制御方法、及びプログラム |
| WO2021033355A1 (ja) | 2019-08-21 | 2021-02-25 | オムロン株式会社 | ロボットの制御装置、ロボットの制御方法、及びプログラム |
| JP2021030339A (ja) * | 2019-08-21 | 2021-03-01 | オムロン株式会社 | ロボットの制御装置、ロボットの制御方法、及びプログラム |
| KR20220020979A (ko) | 2019-08-21 | 2022-02-21 | 오므론 가부시키가이샤 | 로봇의 제어 장치, 로봇의 제어 방법, 및 프로그램 |
| EP4019213A4 (en) * | 2019-08-21 | 2023-08-30 | OMRON Corporation | Control device for robot, control method for robot, and program |
| JP2021035705A (ja) * | 2019-08-30 | 2021-03-04 | Johnan株式会社 | 制御装置、制御方法およびプログラム |
| EP4088887A1 (en) * | 2021-05-13 | 2022-11-16 | OMRON Corporation | Area setting device, rack, control system, area setting method, and program |
| US12459122B2 (en) | 2021-05-13 | 2025-11-04 | Omron Corporation | Area setting device, rack, control system, area setting method, and non-transitory computer readable medium storing program |
| CN114027968B (zh) * | 2021-11-30 | 2024-04-02 | 深圳市联影高端医疗装备创新研究院 | 手术设备、电外科手术装置和手术设备的安全检测方法 |
| CN114027968A (zh) * | 2021-11-30 | 2022-02-11 | 深圳市联影高端医疗装备创新研究院 | 手术设备、电外科手术装置和手术设备的安全检测方法 |
| KR102902119B1 (ko) * | 2024-10-30 | 2025-12-22 | 주식회사 브릴스 | 충돌방지 안전 관제 시스템 |
| JP7832421B1 (ja) * | 2025-04-24 | 2026-03-17 | ファナック株式会社 | ロボットの動作を制御する制御装置及び方法、進入監視機能を設定する装置及び方法、並びに、コンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5343641B2 (ja) | 2013-11-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5343641B2 (ja) | ロボット装置の制御装置及びロボット装置の制御方法 | |
| JP3223826U (ja) | 産業用ロボット | |
| US9914221B2 (en) | Teleoperation of machines having at least one actuated mechanism and a fault detection and recovery system | |
| US20160279796A1 (en) | Robot control apparatus having function of detecting contact with object or person | |
| JP5370127B2 (ja) | ロボットの干渉回避装置 | |
| Geravand et al. | Human-robot physical interaction and collaboration using an industrial robot with a closed control architecture | |
| US10081107B2 (en) | System and method for monitoring entry of object into surrounding area of robot | |
| US8280551B2 (en) | Manipulator with camera | |
| JP6713762B2 (ja) | 建設作業用ロボットおよび建設作業用ロボットの制御方法 | |
| US20160243700A1 (en) | Human cooperation robot system in which robot is caused to perform retreat operation | |
| EP2824522B1 (en) | Human safety provision in mobile automation environments | |
| JP5304347B2 (ja) | ロボット装置の制御装置及びロボット装置の制御方法 | |
| CN111230854A (zh) | 一种智能协作机器人安全控制软件系统 | |
| WO2017060989A1 (ja) | 可動装置の動作制御装置、動作制御システム、および可動装置の動作制御方法 | |
| US10780579B2 (en) | Work robot system | |
| CN114901437B (zh) | 用于监测加工过程的方法和装置 | |
| JP2024023695A (ja) | ロボットグリッパ、およびロボットグリッパの操作方法 | |
| JP5915322B2 (ja) | ロボット装置 | |
| EP2900432B1 (en) | Method for supervising a robot | |
| KR101882565B1 (ko) | 오버라이드를 토대로 하는 예견적인 속도 규제 | |
| CN109249430B (zh) | 带自动移动机器和限界器的设施、限界器和运行方法 | |
| CN109249387B (zh) | 用于配置移动自动机的方法和配置装置 | |
| US20240316772A1 (en) | Control Method, Robot System, And Non-Transitory Computer-Readable Storage Medium Storing Program | |
| US20240316777A1 (en) | Control Method, Robot System, And Non-Transitory Computer-Readable Storage Medium Storing Program | |
| JP7629777B2 (ja) | ロボットの制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130312 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130716 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130729 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5343641 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |