JP2010228690A - 車両運動制御装置 - Google Patents
車両運動制御装置 Download PDFInfo
- Publication number
- JP2010228690A JP2010228690A JP2009080852A JP2009080852A JP2010228690A JP 2010228690 A JP2010228690 A JP 2010228690A JP 2009080852 A JP2009080852 A JP 2009080852A JP 2009080852 A JP2009080852 A JP 2009080852A JP 2010228690 A JP2010228690 A JP 2010228690A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- braking
- value
- acceleration
- generated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/1755—Brake regulation specially adapted to control the stability of the vehicle, e.g. taking into account yaw rate or transverse acceleration in a curve
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/60—Regenerative braking
- B60T2270/613—ESP features related thereto
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Abstract
【解決手段】操作入力情報には車両に横運動を発生させる横運動操作指標を含み、車両運動情報には、車両に発生する前後加速度および車両横方向の運動を表す横運動指標を含み、横運動操作指標が所定値以下、または横運動指標が所定値以下の領域において、横運動操作指標と横運動指標が比例する略線形関係となる前後加速度最大値を操作性確保限界加速度とし、操作性確保限界加速度を制駆動力制御により車両に発生させる前後加速度の上限値として、制駆動トルク制御を行う車両運動制御装置。
【選択図】 図8
Description
実施形態の説明に先立ち、理解が容易になるよう、以下、図1〜図8を用いて、本実施形態における制駆動力制御時の車輪前後力上限値に関して、その概念を説明する。

以下、図9〜図15を用いて、本発明の第1の実施形態による車両運動制御装置の構成及び動作について説明する。
以下、図16,図17を用いて、本発明の第2の実施形態による車両運動制御装置の構成及び動作について説明する。
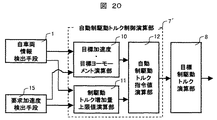
以下、図18〜図20を用いて、本発明の第3の実施形態による車両運動制御装置の構成及び動作について説明する。
以下、図21を用いて、本発明の第4の実施形態による車両運動制御装置の構成及び動作について説明する。
2 車両運動制御演算手段
3 車輪制駆動トルクアクチュエータ
4 ブレーキランプ
5 外界情報取得手段
6 ドライバ要求制駆動トルク演算部
7 自動制駆動トルク制御演算部
8 目標制駆動トルク演算部
9 アクチュエータ駆動指令値演算部
10 目標加速度・目標ヨーモーメント演算部
11 制駆動トルク増加量上限値演算部
12 自動制駆動トルク指令値演算部
13 車両挙動安定化制駆動トルク補正制御演算部
14 摩擦限界制駆動トルク補正制御演算部
15 要求加速度検出手段
16 蓄電装置
Claims (12)
- 車両の周囲情報と、ドライバによる操作入力情報及び車両運動情報を含む車両情報のうち、前記周囲情報または前記車両情報の少なくとも一方に基づいて、少なくとも各車輪の制動トルクまたは駆動トルクの一方を制御する制駆動トルク制御を行う車両運動制御装置であって、
前記操作入力情報には車両に横運動を発生させる横運動操作指標を含み、
前記車両運動情報には、車両に発生する前後加速度および車両横方向の運動を表す横運動指標を含み、
前記横運動操作指標が所定値以下、または前記横運動指標が所定値以下の領域において、前記横運動操作指標と前記横運動指標が比例する略線形関係となる前後加速度最大値を操作性確保限界加速度とし、前記操作性確保限界加速度を前記制駆動力制御により車両に発生させる前後加速度の上限値として、前記制駆動トルク制御を行う車両運動制御装置。 - 請求項1記載の車両運動制御装置であって、
前記横運動操作指標は、操舵角の絶対値、もしくは横すべり角の絶対値の一部または全部であり、
前記横運動指標は、車両に発生する横加速度の絶対値、もしくは車両に発生するヨーレートの絶対値の少なくとも一部または全部である車両運動制御装置。 - 請求項1記載の車両運動制御装置であって、
前記横運動操作指標が所定値および前記横運動指標の所定値は、予め設定される値,ドライバにより入力された値、もしくは前記周囲情報または操作入力情報の少なくとも一方に基づいて設定される値のうち、少なくとも一つの値である車両運動制御装置。 - 請求項1記載の車両運動制御装置であって、
前記前後加速度最大値は、各車輪に発生する制駆動力の制駆動トルク制御入力に対する非線形度合いに基づいて設定される値,推定または検知により自車両が走行している路面で発生可能とされた加速度限界、および前記操作性確保限界加速度に基づいて設定される値である車両運動制御装置。 - 請求項1記載の車両運動制御装置であって、
発生する前後力の上限値を前記摩擦限界、または発生する加速度の上限値を前記加速度限界としてドライバが制動トルクを入力する第1の制動トルク入力部と、
発生する制動力の上限値を前記操作性確保限界、または発生する加速度の上限値を前記操作性確保限界加速度としてドライバが制動トルクを入力する第2の制動トルク入力部と、を有する車両運動制御装置。 - 請求項1記載の車両運動制御装置であって、
発生する前後力の上限値を前記摩擦限界、または発生する加速度の上限値を前記加速度限界としてドライバが駆動トルクを入力する第1の駆動トルク入力部と、
発生する制動力の上限値を前記操作性確保限界、または発生する加速度の上限値を前記操作性確保限界加速度としてドライバが駆動トルクを入力する第2の駆動トルク入力部とを有する車両運動制御装置。 - 車両の周囲情報と、ドライバによる操作入力情報及び車両運動情報を含む車両情報のうち、前記周囲情報または前記車両情報の少なくとも一方に基づいて、少なくとも各車輪の制動トルクまたは駆動トルクの一方を制御する制駆動トルク制御を行う車両運動制御装置であって、
前記操作入力情報には車輪に横力を発生させる横力操作指標を含み、
前記車両運動情報には、車輪に発生する横力を表す車輪横力指標を含み、
前記横力操作指標が所定値以下、もしくは前記車輪横力指標が所定値以下の領域において、前記横力操作指標と前記車輪横力指標が比例する略線形関係となる前後力最大値を操作性確保限界とし、前記操作性確保限界を、前記制駆動トルク制御により車両に発生させる前後力の上限値として、前記制駆動トルクを行う車両運動制御装置。 - 請求項7記載の車両運動制御装置であって、
前記横力操作指標は、操舵角の絶対値、もしくは車輪横すべり角の絶対値の一部または全部であり、
前記横力指標は、車輪に発生する横力,車両に発生する横加速度の絶対値、もしくは車両に発生するヨーレートの絶対値の一部または全部である車両運動制御装置。 - 請求項7記載の車両運動制御装置であって、
前記横力操作指標が所定値および前記横力指標の所定値は、予め設定される値,ドライバにより入力された値、もしくは前記周囲情報または操作入力情報の少なくとも一方に基づいて設定される値のうち、少なくとも一つの値である車両運動制御装置。 - 請求項7記載の車両運動制御装置であって、
前記前後加速度最大値は、各車輪に発生する制駆動力の制駆動トルク制御入力に対する非線形度合いに基づいて設定される値,推定または検知により自車両が走行している路面で発生可能な前後力の摩擦限界、および前記操作性確保限界に基づいて設定される値である車両運動制御装置。 - 請求項7記載の車両運動制御装置であって、
発生する前後力の上限値を前記摩擦限界、または発生する加速度の上限値を前記加速度限界としてドライバが制動トルクを入力する第1の制動トルク入力部と、
発生する制動力の上限値を前記操作性確保限界、または発生する加速度の上限値を前記操作性確保限界加速度としてドライバが制動トルクを入力する第2の制動トルク入力部と、を有する車両運動制御装置。 - 請求項7記載の車両運動制御装置であって、
発生する前後力の上限値を前記摩擦限界、または発生する加速度の上限値を前記加速度限界としてドライバが駆動トルクを入力する第1の駆動トルク入力部と、
発生する制動力の上限値を前記操作性確保限界、または発生する加速度の上限値を前記操作性確保限界加速度としてドライバが駆動トルクを入力する第2の駆動トルク入力部とを有する車両運動制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009080852A JP4920054B2 (ja) | 2009-03-30 | 2009-03-30 | 車両運動制御装置 |
| US12/709,040 US20100250083A1 (en) | 2009-03-30 | 2010-02-19 | Vehicle Dynamics Control Device |
| EP10154107.6A EP2236376B1 (en) | 2009-03-30 | 2010-02-19 | Vehicle dynamics control device |
| US14/217,590 US8983748B2 (en) | 2009-03-30 | 2014-03-18 | Vehicle dynamics control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009080852A JP4920054B2 (ja) | 2009-03-30 | 2009-03-30 | 車両運動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010228690A true JP2010228690A (ja) | 2010-10-14 |
| JP4920054B2 JP4920054B2 (ja) | 2012-04-18 |
Family
ID=42103000
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009080852A Active JP4920054B2 (ja) | 2009-03-30 | 2009-03-30 | 車両運動制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US20100250083A1 (ja) |
| EP (1) | EP2236376B1 (ja) |
| JP (1) | JP4920054B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2626259A1 (en) | 2012-02-09 | 2013-08-14 | Hitachi Automotive Systems, Ltd. | Vehicle motion control apparatus, and vehicle motion control method |
| KR20140075745A (ko) * | 2011-09-20 | 2014-06-19 | 지멘스 악티엔게젤샤프트 | 안티록 브레이크 시스템을 구비한 차량 및 차량 제동 방법 |
| JPWO2013046299A1 (ja) * | 2011-09-26 | 2015-03-26 | トヨタ自動車株式会社 | 車両の運転支援システム |
| CN104812612A (zh) * | 2012-11-21 | 2015-07-29 | 日立汽车系统株式会社 | 车辆控制装置 |
| WO2016051942A1 (ja) * | 2014-09-29 | 2016-04-07 | 日立オートモティブシステムズ株式会社 | 車両の運動制御方法、装置、および、それを搭載した車両 |
| US20230278624A1 (en) * | 2022-01-31 | 2023-09-07 | Advics Co., Ltd. | Motion control device for vehicle, computer-readable medium that stores motion control program, and motion control method for vehicle |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070213911A1 (en) * | 2006-03-09 | 2007-09-13 | Ford Global Technologies, Llc | Trailbraking |
| US8062175B2 (en) * | 2008-11-04 | 2011-11-22 | GM Global Technology Operations LLC | Method and apparatus for optimizing braking control during a threshold braking event |
| JP5143103B2 (ja) * | 2009-09-30 | 2013-02-13 | 日立オートモティブシステムズ株式会社 | 車両の運動制御装置 |
| JP5542014B2 (ja) * | 2010-09-10 | 2014-07-09 | 富士重工業株式会社 | 車両挙動制御装置 |
| GB2483720B (en) | 2010-09-20 | 2017-10-25 | Jaguar Land Rover Ltd | Improvements relating to brake control |
| WO2013037850A1 (de) * | 2011-09-12 | 2013-03-21 | Continental Teves Ag & Co. Ohg | Zeitkorrigiertes sensorsystem |
| JP5838681B2 (ja) * | 2011-09-16 | 2016-01-06 | いすゞ自動車株式会社 | アクチュエータの制御方法及びアクチュエータの制御装置 |
| US8855844B2 (en) * | 2011-10-11 | 2014-10-07 | Robert Bosch Gmbh | System and method for optimal deceleration of a vehicle using regenerative braking |
| US8587424B2 (en) * | 2011-12-05 | 2013-11-19 | David Aberizk | Vehicle regenerative deceleration actuator and indicator system and method |
| US8965609B2 (en) * | 2011-12-29 | 2015-02-24 | Kawasaki Jukogyo Kabushiki Kaisha | Electric vehicle |
| JP2014076715A (ja) * | 2012-10-10 | 2014-05-01 | Mitsubishi Motors Corp | ブレーキランプ制御装置 |
| US10358037B2 (en) * | 2013-03-28 | 2019-07-23 | Honda Motor Co., Ltd. | Vehicular brake system |
| JP2014193691A (ja) | 2013-03-29 | 2014-10-09 | Hitachi Automotive Systems Ltd | 車両の運動制御装置 |
| JP5880500B2 (ja) * | 2013-08-29 | 2016-03-09 | トヨタ自動車株式会社 | 車両 |
| JP6138655B2 (ja) | 2013-10-10 | 2017-05-31 | 日立オートモティブシステムズ株式会社 | 車両の運動制御装置 |
| KR101890440B1 (ko) * | 2013-11-11 | 2018-09-28 | 주식회사 만도 | 브레이크 트랙션 컨트롤 시스템의 브레이크 제동압력 한계값 제한 방법 |
| DE102014208524B4 (de) * | 2014-05-07 | 2025-10-30 | Robert Bosch Gmbh | Ortsgebundene verkehrsanalyse mit erkennung eines verkehrspfads |
| US9707967B2 (en) * | 2015-06-30 | 2017-07-18 | Kelsey-Hayes Company | Method of traction control for a motor vehicle |
| CN105083280A (zh) * | 2015-07-27 | 2015-11-25 | 北汽福田汽车股份有限公司 | 一种四驱车辆扭矩控制方法和系统 |
| KR101964026B1 (ko) * | 2015-11-09 | 2019-03-29 | 닛산 지도우샤 가부시키가이샤 | 제구동력 제어 방법 및 제구동력 제어 장치 |
| JP6604894B2 (ja) * | 2016-04-12 | 2019-11-13 | 日立オートモティブシステムズ株式会社 | 車両制御装置及び方法 |
| US10053070B2 (en) * | 2016-05-19 | 2018-08-21 | General Electric Company | System and method for traction control |
| US10974705B2 (en) * | 2016-06-15 | 2021-04-13 | Volvo Truck Corporation | Wheel controller for a vehicle |
| CN109311462B (zh) * | 2016-06-15 | 2021-03-05 | 日立汽车系统株式会社 | 车辆控制装置 |
| DE102016211728A1 (de) * | 2016-06-29 | 2018-01-04 | Trw Automotive U.S. Llc | Reibwertschätzer |
| JP6765908B2 (ja) * | 2016-09-07 | 2020-10-07 | Ntn株式会社 | 車両の旋回制御装置 |
| US10534364B2 (en) * | 2016-11-17 | 2020-01-14 | Baidu Usa Llc | Method and system for autonomous vehicle speed following |
| CN106740769B (zh) * | 2016-12-26 | 2019-03-26 | 清华大学苏州汽车研究院(相城) | 一种路面附着自适应的自主紧急制动控制算法 |
| JP6990622B2 (ja) * | 2018-04-26 | 2022-01-12 | 日立Astemo株式会社 | 制駆動力制御装置、車両制御方法および車両制御システム |
| US11345327B2 (en) | 2018-08-06 | 2022-05-31 | Xl Hybrids, Inc. | Throttle signal controller for a dynamic hybrid vehicle |
| JP7124561B2 (ja) * | 2018-08-28 | 2022-08-24 | 株式会社デンソー | 旋回制御装置 |
| CN111452781B (zh) * | 2020-03-24 | 2023-01-17 | 东南大学 | 一种改善加速舒适性的轮毂电机驱动电动汽车强鲁棒自适应驱动防滑控制方法 |
| CN111746501B (zh) * | 2020-07-06 | 2021-08-20 | 清华大学 | 一种基于驱制动协同控制的车辆操纵极限扩展方法和系统 |
| CN115743081A (zh) * | 2021-03-23 | 2023-03-07 | 武汉路特斯汽车有限公司 | 一种底盘控制方法及底盘控制系统 |
| US12115965B2 (en) | 2021-03-30 | 2024-10-15 | Komatsu America Corp. | Vehicle with antilock braking system |
| CN113200034A (zh) * | 2021-05-31 | 2021-08-03 | 联合汽车电子有限公司 | 一种扭矩控制方法、装置、存储介质、车辆 |
| EP4140839B1 (en) * | 2021-08-31 | 2024-10-30 | Volvo Truck Corporation | Vehicle control based on a dynamically configured sideslip limit |
| CN113928339A (zh) * | 2021-10-21 | 2022-01-14 | 东风悦享科技有限公司 | 一种基于状态判断和误差反馈的车辆纵向运动控制系统及方法 |
| CN114633780B (zh) * | 2021-12-30 | 2022-11-25 | 中南大学 | 重载列车及其纵向动力学牵引运行优化控制系统 |
| JP7476910B2 (ja) * | 2022-01-26 | 2024-05-01 | トヨタ自動車株式会社 | 車両の制御システムおよび制御方法 |
| JP7850009B2 (ja) * | 2022-05-27 | 2026-04-22 | 株式会社Subaru | 制駆動力制御装置 |
| CN115946546B (zh) * | 2023-01-17 | 2024-04-16 | 重庆赛力斯新能源汽车设计院有限公司 | 崎岖路况下电动汽车单踏板模式减速运行控制方法及系统 |
| CN118597107A (zh) * | 2023-06-15 | 2024-09-06 | 华为技术有限公司 | 扭矩控制方法及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003261016A (ja) * | 2002-03-08 | 2003-09-16 | Toyota Central Res & Dev Lab Inc | 最大路面摩擦係数推定装置 |
| JP2007106273A (ja) * | 2005-10-14 | 2007-04-26 | Nissan Motor Co Ltd | 車両走行状態推定装置 |
| JP2007112367A (ja) * | 2005-10-24 | 2007-05-10 | Hitachi Ltd | 車両タイヤ状態検出方法および車両タイヤ状態検出装置 |
| JP2007269294A (ja) * | 2006-03-31 | 2007-10-18 | Toyota Central Res & Dev Lab Inc | 車両運動制御装置及び制御方法 |
| WO2008133150A1 (ja) * | 2007-04-17 | 2008-11-06 | Nissan Motor Co., Ltd. | 車輪接地面摩擦状態推定のための装置と方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03189338A (ja) * | 1989-12-19 | 1991-08-19 | Japan Electron Control Syst Co Ltd | トラクションコントロール装置 |
| JPH061229A (ja) | 1992-06-19 | 1994-01-11 | Fuji Heavy Ind Ltd | 自動ブレーキ装置の制御方法 |
| JP3062777B2 (ja) | 1992-07-14 | 2000-07-12 | 本田技研工業株式会社 | 自動車の車速制御装置 |
| JP3784436B2 (ja) * | 1995-11-20 | 2006-06-14 | 本田技研工業株式会社 | 車両の制動力制御装置 |
| JPH10269499A (ja) | 1997-03-26 | 1998-10-09 | Mitsubishi Motors Corp | 車両の車速制御装置 |
| DE10130663A1 (de) * | 2001-06-28 | 2003-01-23 | Continental Teves Ag & Co Ohg | Verfahren zum Modifizieren einer Fahrstabilitätsregelung eines Fahrzeugs |
| JP4089359B2 (ja) * | 2002-09-03 | 2008-05-28 | 株式会社日立製作所 | ハイブリッド車の制御装置 |
| JP2009520643A (ja) * | 2005-12-15 | 2009-05-28 | ザ・グッドイヤー・タイヤ・アンド・ラバー・カンパニー | 車両特性を決定する方法 |
| JP2007216839A (ja) | 2006-02-16 | 2007-08-30 | Fujitsu Ten Ltd | 運転支援装置及び運転支援方法 |
| JP4636012B2 (ja) * | 2006-12-11 | 2011-02-23 | トヨタ自動車株式会社 | 車両の制動制御装置 |
| JP4568302B2 (ja) | 2007-05-18 | 2010-10-27 | 株式会社日立製作所 | 加加速度情報を用いた車両の前後加速度制御装置 |
| JP2009120116A (ja) | 2007-11-16 | 2009-06-04 | Hitachi Ltd | 車両衝突回避支援装置 |
| CN102143869B (zh) * | 2008-11-25 | 2014-07-16 | 丰田自动车株式会社 | 车辆的行驶控制装置 |
-
2009
- 2009-03-30 JP JP2009080852A patent/JP4920054B2/ja active Active
-
2010
- 2010-02-19 EP EP10154107.6A patent/EP2236376B1/en active Active
- 2010-02-19 US US12/709,040 patent/US20100250083A1/en not_active Abandoned
-
2014
- 2014-03-18 US US14/217,590 patent/US8983748B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003261016A (ja) * | 2002-03-08 | 2003-09-16 | Toyota Central Res & Dev Lab Inc | 最大路面摩擦係数推定装置 |
| JP2007106273A (ja) * | 2005-10-14 | 2007-04-26 | Nissan Motor Co Ltd | 車両走行状態推定装置 |
| JP2007112367A (ja) * | 2005-10-24 | 2007-05-10 | Hitachi Ltd | 車両タイヤ状態検出方法および車両タイヤ状態検出装置 |
| JP2007269294A (ja) * | 2006-03-31 | 2007-10-18 | Toyota Central Res & Dev Lab Inc | 車両運動制御装置及び制御方法 |
| WO2008133150A1 (ja) * | 2007-04-17 | 2008-11-06 | Nissan Motor Co., Ltd. | 車輪接地面摩擦状態推定のための装置と方法 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140075745A (ko) * | 2011-09-20 | 2014-06-19 | 지멘스 악티엔게젤샤프트 | 안티록 브레이크 시스템을 구비한 차량 및 차량 제동 방법 |
| KR101975623B1 (ko) * | 2011-09-20 | 2019-05-07 | 루카스 오토모티브 게엠베하 | 안티록 브레이크 시스템을 구비한 차량 및 차량 제동 방법 |
| JPWO2013046299A1 (ja) * | 2011-09-26 | 2015-03-26 | トヨタ自動車株式会社 | 車両の運転支援システム |
| EP2626259A1 (en) | 2012-02-09 | 2013-08-14 | Hitachi Automotive Systems, Ltd. | Vehicle motion control apparatus, and vehicle motion control method |
| JP2013163422A (ja) * | 2012-02-09 | 2013-08-22 | Hitachi Automotive Systems Ltd | 車両運動制御装置及び車両運動制御方法 |
| CN104812612A (zh) * | 2012-11-21 | 2015-07-29 | 日立汽车系统株式会社 | 车辆控制装置 |
| CN104812612B (zh) * | 2012-11-21 | 2016-12-14 | 日立汽车系统株式会社 | 车辆控制装置 |
| WO2016051942A1 (ja) * | 2014-09-29 | 2016-04-07 | 日立オートモティブシステムズ株式会社 | 車両の運動制御方法、装置、および、それを搭載した車両 |
| JP2016068649A (ja) * | 2014-09-29 | 2016-05-09 | 日立オートモティブシステムズ株式会社 | 車両の運動制御方法、装置、および、それを搭載した車両 |
| US10384673B2 (en) | 2014-09-29 | 2019-08-20 | Hitachi Automotive Systems, Ltd. | Method and device for controlling vehicle motion and vehicle equipped with same |
| US20230278624A1 (en) * | 2022-01-31 | 2023-09-07 | Advics Co., Ltd. | Motion control device for vehicle, computer-readable medium that stores motion control program, and motion control method for vehicle |
| US12454313B2 (en) * | 2022-01-31 | 2025-10-28 | Advics Co., Ltd. | Motion control device for vehicle, computer-readable medium that stores motion control program, and motion control method for vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140200787A1 (en) | 2014-07-17 |
| EP2236376B1 (en) | 2015-04-15 |
| US8983748B2 (en) | 2015-03-17 |
| EP2236376A1 (en) | 2010-10-06 |
| JP4920054B2 (ja) | 2012-04-18 |
| US20100250083A1 (en) | 2010-09-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4920054B2 (ja) | 車両運動制御装置 | |
| CN105612091B (zh) | 车辆的运动控制装置 | |
| CN103241127B (zh) | 车辆运动控制装置以及车辆运动控制方法 | |
| CN102481930B (zh) | 车辆的运动控制装置 | |
| CN102421645B (zh) | 用于执行车辆驾驶稳定性的闭环或开环控制的方法和设备 | |
| CN105102291B (zh) | 车辆的运动控制装置 | |
| CN105882631B (zh) | 车辆用行驶控制装置 | |
| KR101697809B1 (ko) | 브레이킹 및 드라이빙 동작들로 드라이빙 역학에 영향을 미치는 방법 및 브레이킹 시스템 | |
| EP3530535B1 (en) | Vehicle movement control device, vehicle movement control method, and vehicle movement control program | |
| US8395491B2 (en) | Method for controlling driving stability | |
| JP5841265B2 (ja) | 車輪制御装置、車両、車輪制御方法 | |
| JP5503260B2 (ja) | 車両運動制御装置 | |
| CN106132755A (zh) | 车辆的运动控制系统、车辆、以及程序 | |
| CN104703854A (zh) | 车辆的运动控制装置 | |
| CN104245462A (zh) | 车辆的驾驶支援系统、路面摩擦状态推定系统 | |
| JP2017505259A (ja) | 車両速度制御システムおよび車両速度制御方法 | |
| US11072337B2 (en) | Method for ascertaining the coefficient of friction between a vehicle wheel and the roadway | |
| WO2016092586A1 (ja) | 制駆動力制御装置及び制駆動力制御方法 | |
| JP2015030314A (ja) | 車両制御装置 | |
| JP2014212614A (ja) | 車輪制御装置、車両、車輪制御方法 | |
| JP2014231284A (ja) | 車両制御装置 | |
| JPH10138894A (ja) | 車両の自動制動制御装置 | |
| US20240383336A1 (en) | Vehicle control device, vehicle control method, and vehicle control program | |
| JP4928221B2 (ja) | 車両挙動制御装置 | |
| KR101373280B1 (ko) | 차량 자세 제어 시스템의 회전 보조 기능을 제공하기 위한 장치 및 그 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111004 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120131 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4920054 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150210 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |