JP2010245155A - ウェハ吸引パッド及びそれを備えたプリアライナ - Google Patents
ウェハ吸引パッド及びそれを備えたプリアライナ Download PDFInfo
- Publication number
- JP2010245155A JP2010245155A JP2009089964A JP2009089964A JP2010245155A JP 2010245155 A JP2010245155 A JP 2010245155A JP 2009089964 A JP2009089964 A JP 2009089964A JP 2009089964 A JP2009089964 A JP 2009089964A JP 2010245155 A JP2010245155 A JP 2010245155A
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- vacuum
- pad
- vacuum groove
- groove
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
スループットに寄与でき、ウェハの開放後においてもパッド上でのウェハがずれず、アライメント精度が高精度でありながら、パーティクル汚染が極めて少ないプリアライナを提供する。
【解決手段】
ウェハを吸引して保持するパッド1が、パッド1の表面から突出してウェハを直接支持し、パッド1の表面とウェハとの間に微小な隙間を形成する複数の支持片10と、複数の支持片10の内側に形成され、ウェハとともに略閉空間を形成する第1真空溝11と、複数の支持片10の外側に形成され、ウェハとともに略閉空間を形成する第2真空溝12と、を備え、第1真空溝11の略閉空間の圧力G1と第2真空溝の略閉空間の圧力G2との関係が、G1≦G2となるよう第1と第2の真空溝を真空吸引
する。
【選択図】図1
Description
一般的にプリアライナは半導体製造装置や半導体の検査装置内にあって、ウェハハンドリングロボットの近傍に設置され、半導体搬送システムの一部として機能し、ウェハハンドリングロボットによって載置されたウェハの位置を合わせる。プリアライナは載置されたウェハのノッチを検出するためのノッチ検出センサを備えており、パッドにウェハが載置されると、ウェハを旋回させることでノッチ検出センサにて順次ウェハ外周をセンシングし、ノッチ位置を検出するとともに、その際の旋回位置情報から演算処理を行い、ノッチ位置をあらかじめ決められた所定の位置に旋回させる。従って、ウェハを載置するパッドは、ノッチ位置の検出や位置あわせのための旋回をするため、ウェハを確実に保持固定する必要がある。
また、ガラス基板を保持する方法として、同心上に配置したゴムから成るシールリングの内側を真空ポンプで吸引して真空チャックする方法がある(例えば、特許文献2参照)。
また、特許文献1において、応答性の問題から、負圧を得る方法としてファンではなく、真空ポンプを接続した場合を考える。この場合には、ウェハ周辺部の大気部分の占める割合が大きいため、真空吸引する体積量が極めて大きく、すなわち開放空間を吸引することになるので、真空度が上がらずに十分な保持力を得ることができない、もしくは、保持力を得るまでに時間がかかる、真空ポンプなどの真空源の真空度が低下して、他の真空機器を使用している場合はそれらへの影響が出てくる、これらへの影響を少なくするためには大きな容量の真空ポンプが必要になる、など、多くの問題がある。
また、ウェハの保持時は、シールリングによりウェハ裏面との間の気密性が保たれている。そのため、ウェハ搬送ロボットなどとのウェハ受け渡しの際に、保持力を開放させるために大気を流入させると、大気突入の勢いによりウェハの位置がずれる問題がある。アライメントを行ったウェハがずれると位置精度が保てず、結果としてプリアライナのアライメント精度が悪くなるという問題がある。この問題を最小限にするために、大気流入速度をスローベントなどの徐々に流入させる方法をとると、保持力開放までに時間がかかり、スループットを悪化させるという問題がある。
請求項1記載の発明は、ウェハを真空吸着して保持するウェハ吸引パッドにおいて、 前記パッドの表面から突出して前記ウェハを直接支持し、前記パッドの表面と前記ウェハとの間に微小な隙間を形成する複数の支持片と、前記複数の支持片の内側に形成され、前記ウェハとともに略閉空間を形成する第1真空溝と、前記複数の支持片の外側に形成され、前記ウェハとともに略閉空間を形成する第2真空溝と、を備え、前記第1真空溝の略閉空間の圧力G1と前記第2真空溝の略閉空間の圧力G2との関係が、G1≦G2となるよう前記第1と第2の真空溝が真空吸引されることを特徴としたウェハ吸引パッドとするものである。
請求項2記載の発明は、前記複数の支持片のそれぞれが、ゴムで形成されることを特徴とした請求項1記載のウェハ吸引パッドとするものである。
請求項3記載の発明は、前記複数の支持片が、同一円周上に配置され、前記円周と同心の円を描くよう前記第1真空溝が形成され、前記複数の支持片の円周と前記第1真空溝が形成する円と同心の円を描くよう前記第2真空溝が環状に形成されることを特徴とした請求項1記載のウェハ吸引パッドとするものである。
請求項4記載の発明は、前記第1真空溝を真空吸引する真空源と、前記第2真空溝を真空吸引する真空源とが各々独立して設けられることを特徴とした請求項1記載のウェハ吸引パッドとするものである。
請求項5記載の発明は、前記第1真空溝を真空吸引する真空源と、前記第2真空溝を真空吸引する真空源とが同一のものであって、前記第2真空溝を真空吸引する流路に設けられたレギュレータによって前記第2真空溝の真空吸引が前記第1真空溝の真空吸引よりも弱められることを特徴とした請求項1記載のウェハ吸引パッドとするものである。
請求項6記載の発明は、ウェハを真空吸引によって保持するパッドと、前記ウェハを保持したパッドを旋回させる旋回機構と、前記パッドに保持されたウェハの外周を検知するセンサと、を備え、前記センサによって検出された前記ウェハのノッチ或いはオリフラを所望の方向へ回転させるプリアライナにおいて、前記パッドが、前記パッドの表面から突出して前記ウェハを直接支持し、前記パッドの表面と前記ウェハとの間に微小な隙間を形成する複数の支持片と、前記複数の支持片の内側に形成され、前記ウェハとともに略閉空間を形成する第1真空溝と、前記複数の支持片の外側に形成され、前記ウェハとともに略閉空間を形成する第2真空溝と、を備え、前記第1真空溝の略閉空間の圧力G1と前記第2真空溝の略閉空間の圧力G2との関係が、G1≦G2となるよう前記第1と第2の真空溝が真空吸引されることを特徴としたプリアライナとするものである。
請求項7記載の発明は、請求項6記載のプリアライナと、前記プリアライナに前記ウェハを載置するウェハハンドリングロボットと、を備えたことを特徴とする半導体搬送システムとするものである。
請求項8記載の発明は、請求項7記載の半導体搬送システムを備えたことを特徴とする半導体製造装置とするものである。
請求項9記載の発明は、請求項7記載の半導体搬送システムを備えたことを特徴とする半導体検査装置とするものである。
また、保持力開放時の大気突入は、ウェハと真空溝とが略閉空間であることから、ウェハの位置には影響なく真空溝は大気圧に戻ることからウェハの位置ずれも発生しないため、高精度のアライメントができる。さらに、ウェハ裏面に接触しているのは支持片のみであり、ウェハ接触部の面積がほとんどないので、ウェハ裏面のパーティクル付着が極めて少ない。
したがって、本発明にて、高スループット、アライメント精度が高精度でありながら、パーティクル汚染が極めて少ないプリアライナを提供することができる。
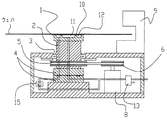
1はウェハを載置するパッドであり、パッドベース2に固定されている。パッドベース2の外周にはベアリングを設けており、パッドベース2およびパッド1は、装置本体に対して回転自在に支持されている。パッドベース2の下側には、ロータリジョイント4が接続されている。ロータリジョイント4は上下に2分割された部品で構成され、それらに圧縮空気もしくは真空を流す事が出来る流路が独立して複数路形成されており、上下いずれかの部品が連続して旋回できるようになっており、本実施例では上側を旋回させるものである。なお、旋回中であっても流路は独立してシールされているため、流路内の気体の圧力などは何ら変化はない。
また、パッドベース2にはプーリ5が設けられており、サーボモータである旋回用モータ8の軸端に設けているプーリ6とタイミングベルト7にて接続されていて、パットベース2は旋回動作ができるとともに、旋回位置情報が図示していないコントローラにて管理される。
9はノッチ検出センサであり、パッド1に載置されたウェハの外周付近に設けられ、ウェハのノッチ位置を検出することができる。パッド1に載置されたウェハを旋回させることで、ウェハ外周にあるノッチをノッチ検出センサ9がセンシングし、ノッチ位置情報と旋回位置情報を図示していないコントローラにより演算処理することで、ウェハのノッチを割り出し、ウェハを所定の位置へ旋回させることができる。
第1真空溝11、第2真空溝12は、パッドベース2内部に独立して形成された流路にそれぞれ接続しており、さらに、ロータリジョイント4の流路と連通している。ロータリジョイント4の固定側となる下側の部品から第1真空溝11に連通している流路は、大気流路との切り換え用のソレノイドバルブ13を介して半導体製造装置の真空源へと接続されている。一方、第2真空溝12に連通している流路は、圧縮空気などから真空を生成する真空発生器や大気流路との切り換え用のソレノイドバルブなどからなる真空発生ユニット14に接続されている。
図4は、パッドにおける他の実施例を示すもので、パッド面からのウェハ支持片10をゴムから成るOリングの切断片をほんの僅かだけ飛び出すように埋設固定したものである。
図示していないウェハハンドリングロボットがプリアライナのパッド1にウェハを載置する。載置すると、ソレノイドバルブ13、真空発生ユニット14により、第1真空溝11と第2真空溝12に真空吸引を行う。ウェハはウェハ支持片10による摩擦力に加え、真空吸引による保持力が増加し、パッド1に保持される。次にノッチ位置検出のためにウェハ旋回動作を行う。
この真空吸引の際、第1真空溝11は、その外周にある第2真空溝12により、差圧が少ないため真空源に大きな負担なく、第1真空溝11が形成する略閉空間の真空を確保することができる。また、第2真空溝12は、第2真空溝12が形成する略閉空間の外側は大気であるので、この空間の真空度の確保の点では高い真空度まで吸引することは容易でないものの、第1真空溝11の真空源とは独立しているため、第1真空溝11に求める高い真空度の確保には何ら影響がない。
なお、第1真空溝11の真空源の能力が十分に大きい場合は、図3の例で示すように第1真空溝11に高い真空度が確保できるように真空レギュレータ15を調整すればよい。
そして、ノッチ検出センサ9によるノッチ検出と、その際の旋回位置情報により、図示していないコントローラによる演算処理により、ノッチ位置があらかじめ決められた位置になるように、さらにウェハを旋回させて、アライメント動作を終了する。
その後、図示していないウェハハンドリングロボットがプリアライナのパッド1にアクセスしたところで、ソレノイドバルブ13.真空発生ユニット14の切り換えにより真空印加を開放し、ウェハを取り去る。真空吸引の開放についても、第1真空溝11、第2真空溝12には、支持片10によりウェハ下面との間に極僅かではあるが空隙がある略閉空間であるため、ウェハの位置がずれることなく、かつ時間がかかることなくすぐに真空吸引を開放することができる。
2 パッドベース
3 ベアリング
4 ロータリジョイント
5 プーリ
6 プーリ
7 タイミングベルト
8 旋回用モータ
9 ノッチ検出センサ
10 ウェハ支持片
11 第1真空溝
12 第2真空溝
13 ソレノイドバルブ
14 真空発生ユニット
15 真空レギュレータ
Claims (9)
- ウェハを真空吸着して保持するウェハ吸引パッドにおいて、
前記パッドの表面から突出して前記ウェハを直接支持し、前記パッドの表面と前記ウェハとの間に微小な隙間を形成する複数の支持片と、
前記複数の支持片の内側に形成され、前記ウェハとともに略閉空間を形成する第1真空溝と、
前記複数の支持片の外側に形成され、前記ウェハとともに略閉空間を形成する第2真空溝と、を備え、
前記第1真空溝の略閉空間の圧力G1と前記第2真空溝の略閉空間の圧力G2との関係が、G1≦G2となるよう前記第1と第2の真空溝が真空吸引されることを特徴としたウェハ吸引パッド。 - 前記複数の支持片のそれぞれが、ゴムで形成されることを特徴とした請求項1記載のウェハ吸引パッド。
- 前記複数の支持片が、同一円周上に配置され、前記円周と同心の円を描くよう前記第1真空溝が形成され、前記複数の支持片の円周と前記第1真空溝が形成する円と同心の円を描くよう前記第2真空溝が環状に形成されることを特徴とした請求項1記載のウェハ吸引パッド。
- 前記第1真空溝を真空吸引する真空源と、前記第2真空溝を真空吸引する真空源とが各々独立して設けられることを特徴とした請求項1記載のウェハ吸引パッド。
- 前記第1真空溝を真空吸引する真空源と、前記第2真空溝を真空吸引する真空源とが同一のものであって、前記第2真空溝を真空吸引する流路に設けられたレギュレータによって前記第2真空溝の真空吸引が前記第1真空溝の真空吸引よりも弱められることを特徴とした請求項1記載のウェハ吸引パッド。
- ウェハを真空吸引によって保持するパッドと、前記ウェハを保持したパッドを旋回させる旋回機構と、前記パッドに保持されたウェハの外周を検知するセンサと、を備え、前記センサによって検出された前記ウェハのノッチ或いはオリフラを所望の方向へ回転させるプリアライナにおいて、
前記パッドが、
前記パッドの表面から突出して前記ウェハを直接支持し、前記パッドの表面と前記ウェハとの間に微小な隙間を形成する複数の支持片と、
前記複数の支持片の内側に形成され、前記ウェハとともに略閉空間を形成する第1真空溝と、
前記複数の支持片の外側に形成され、前記ウェハとともに略閉空間を形成する第2真空溝と、を備え、
前記第1真空溝の略閉空間の圧力G1と前記第2真空溝の略閉空間の圧力G2との関係が、G1≦G2となるよう前記第1と第2の真空溝が真空吸引されることを特徴としたプリアライナ。 - 請求項6記載のプリアライナと、前記プリアライナに前記ウェハを載置するウェハハンドリングロボットと、を備えたことを特徴とする半導体搬送システム。
- 請求項7記載の半導体搬送システムを備えたことを特徴とする半導体製造装置。
- 請求項7記載の半導体搬送システムを備えたことを特徴とする半導体検査装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009089964A JP5316172B2 (ja) | 2009-04-02 | 2009-04-02 | ウェハ吸引パッド及びそれを備えたプリアライナ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009089964A JP5316172B2 (ja) | 2009-04-02 | 2009-04-02 | ウェハ吸引パッド及びそれを備えたプリアライナ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010245155A true JP2010245155A (ja) | 2010-10-28 |
| JP5316172B2 JP5316172B2 (ja) | 2013-10-16 |
Family
ID=43097881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009089964A Expired - Fee Related JP5316172B2 (ja) | 2009-04-02 | 2009-04-02 | ウェハ吸引パッド及びそれを備えたプリアライナ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5316172B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013157462A (ja) * | 2012-01-30 | 2013-08-15 | Yaskawa Electric Corp | 伝達機構、基板位置決め装置およびロボット |
| CN111001544A (zh) * | 2019-12-31 | 2020-04-14 | 青岛天仁微纳科技有限责任公司 | 用于纳米压印的均匀旋涂设备 |
| JP2022010545A (ja) * | 2020-06-29 | 2022-01-17 | 京セラ株式会社 | 吸着パッド |
| CN120048780A (zh) * | 2025-04-23 | 2025-05-27 | 素珀电子科技(上海)有限公司 | 一种半导体晶圆动态定心装置 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0661134A (ja) * | 1992-08-05 | 1994-03-04 | Tokyo Ohka Kogyo Co Ltd | スピンナーチャック |
| JPH07142348A (ja) * | 1993-11-16 | 1995-06-02 | Nikon Corp | 露光装置 |
| JPH09134949A (ja) * | 1995-10-27 | 1997-05-20 | Samsung Aerospace Ind Ltd | 真空チャック |
| JPH10242255A (ja) * | 1997-02-28 | 1998-09-11 | Kyocera Corp | 真空吸着装置 |
| JPH11214486A (ja) * | 1998-01-27 | 1999-08-06 | Komatsu Ltd | 基板処理装置 |
| JP2005101455A (ja) * | 2003-09-26 | 2005-04-14 | Canon Inc | 位置決め装置 |
| JP2006235018A (ja) * | 2005-02-23 | 2006-09-07 | Hitachi High-Technologies Corp | 露光装置、露光方法、及び表示用パネル基板の製造方法 |
| JP2006305713A (ja) * | 2005-03-28 | 2006-11-09 | Nikon Corp | 吸着装置、研磨装置、半導体デバイス及び半導体デバイス製造方法 |
| JP2007012838A (ja) * | 2005-06-30 | 2007-01-18 | Nikon Corp | 基板保持方法、位置計測方法、基板保持装置、露光装置、デバイス製造方法 |
| JP2007207840A (ja) * | 2006-01-31 | 2007-08-16 | Sumitomo Osaka Cement Co Ltd | サセプタ装置 |
| JP2007273693A (ja) * | 2006-03-31 | 2007-10-18 | Nikon Corp | 基板保持部材及び基板保持方法、基板保持装置、並びに露光装置及び露光方法 |
-
2009
- 2009-04-02 JP JP2009089964A patent/JP5316172B2/ja not_active Expired - Fee Related
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0661134A (ja) * | 1992-08-05 | 1994-03-04 | Tokyo Ohka Kogyo Co Ltd | スピンナーチャック |
| JPH07142348A (ja) * | 1993-11-16 | 1995-06-02 | Nikon Corp | 露光装置 |
| JPH09134949A (ja) * | 1995-10-27 | 1997-05-20 | Samsung Aerospace Ind Ltd | 真空チャック |
| JPH10242255A (ja) * | 1997-02-28 | 1998-09-11 | Kyocera Corp | 真空吸着装置 |
| JPH11214486A (ja) * | 1998-01-27 | 1999-08-06 | Komatsu Ltd | 基板処理装置 |
| JP2005101455A (ja) * | 2003-09-26 | 2005-04-14 | Canon Inc | 位置決め装置 |
| JP2006235018A (ja) * | 2005-02-23 | 2006-09-07 | Hitachi High-Technologies Corp | 露光装置、露光方法、及び表示用パネル基板の製造方法 |
| JP2006305713A (ja) * | 2005-03-28 | 2006-11-09 | Nikon Corp | 吸着装置、研磨装置、半導体デバイス及び半導体デバイス製造方法 |
| JP2007012838A (ja) * | 2005-06-30 | 2007-01-18 | Nikon Corp | 基板保持方法、位置計測方法、基板保持装置、露光装置、デバイス製造方法 |
| JP2007207840A (ja) * | 2006-01-31 | 2007-08-16 | Sumitomo Osaka Cement Co Ltd | サセプタ装置 |
| JP2007273693A (ja) * | 2006-03-31 | 2007-10-18 | Nikon Corp | 基板保持部材及び基板保持方法、基板保持装置、並びに露光装置及び露光方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013157462A (ja) * | 2012-01-30 | 2013-08-15 | Yaskawa Electric Corp | 伝達機構、基板位置決め装置およびロボット |
| CN111001544A (zh) * | 2019-12-31 | 2020-04-14 | 青岛天仁微纳科技有限责任公司 | 用于纳米压印的均匀旋涂设备 |
| JP2022010545A (ja) * | 2020-06-29 | 2022-01-17 | 京セラ株式会社 | 吸着パッド |
| JP7538635B2 (ja) | 2020-06-29 | 2024-08-22 | 京セラ株式会社 | 吸着パッド |
| CN120048780A (zh) * | 2025-04-23 | 2025-05-27 | 素珀电子科技(上海)有限公司 | 一种半导体晶圆动态定心装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5316172B2 (ja) | 2013-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI509725B (zh) | 基板處理裝置 | |
| US8297568B2 (en) | Sucking and holding device | |
| TWI850451B (zh) | 晶圓搬送裝置、及晶圓搬送方法 | |
| CN110828359B (zh) | 预对准装置及硅片预对准方法 | |
| TWI818942B (zh) | 接合裝置及接合方法 | |
| JP6568986B1 (ja) | アライメント装置、半導体ウエハ処理装置、およびアライメント方法 | |
| JPH08195428A (ja) | 真空吸着装置 | |
| JP5316172B2 (ja) | ウェハ吸引パッド及びそれを備えたプリアライナ | |
| CN113910072B (zh) | 吸盘转台和晶圆加工系统 | |
| JP5493919B2 (ja) | チャックテーブル装置およびこれを用いた半導体装置の製造方法 | |
| JP2006310697A (ja) | 吸着チャック | |
| TWM608263U (zh) | 基板處理裝置 | |
| JP2002329769A (ja) | アライメント装置 | |
| CN111261565A (zh) | 一种半导体设备及其晶圆传输腔室和晶圆传输方法 | |
| JP2004140058A (ja) | ウエハ搬送装置およびウエハ処理装置 | |
| CN104103568A (zh) | 卡盘工作台 | |
| JP2014241357A (ja) | 基板保持装置、及び光学装置、及び基板保持方法 | |
| JPH08143147A (ja) | 薄板状ワークの吸着装置 | |
| JP2022172553A (ja) | 吸引保持テーブル及び加工装置 | |
| CN216980525U (zh) | 一种晶圆对准装置 | |
| JP2008053325A (ja) | 基板搬送装置及び基板搬送方法 | |
| CN118927054A (zh) | 晶圆加工方法、晶圆吸附装置、磨削装置及减薄设备 | |
| JP2008270233A (ja) | 真空吸着装置用吸着体及び真空吸着装置 | |
| JP6756600B2 (ja) | 基板処理装置および基板処理方法 | |
| JP5187231B2 (ja) | プリアライナ装置、ウェハ搬送システム、半導体製造装置、半導体検査装置およびウェハのアライメント方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111214 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130129 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130301 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130624 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |