JP2011081663A - 画像描画装置、画像描画方法、及びコンピュータプログラム - Google Patents
画像描画装置、画像描画方法、及びコンピュータプログラム Download PDFInfo
- Publication number
- JP2011081663A JP2011081663A JP2009234394A JP2009234394A JP2011081663A JP 2011081663 A JP2011081663 A JP 2011081663A JP 2009234394 A JP2009234394 A JP 2009234394A JP 2009234394 A JP2009234394 A JP 2009234394A JP 2011081663 A JP2011081663 A JP 2011081663A
- Authority
- JP
- Japan
- Prior art keywords
- perfect circle
- storage area
- end point
- registered
- divisions
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—Two-dimensional [2D] image generation
- G06T11/20—Drawing from basic elements
- G06T11/23—Drawing from basic elements using straight lines or curves
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Image Generation (AREA)
Abstract
【解決手段】円図形が幾つの直線に分割されるかを、当該円図形の半径rと対応付けて分割数テーブルTB1に登録しておく。また、分割された直線の端点のX座標算出用データD_xとY座標算出用データD_yとを、直線分割数Nと対応付けて端点テーブルTB2に予め登録しておく。したがって、描画図形が円図形の場合には、外形(曲線)をベジエ曲線で近似する必要がなく、三角関数の演算により、分割された直線の各分割点(端点)を直接に且つ高速に求めることができる。また、分割された直線の端点の座標の計算処理で負荷の掛かる計算処理の効率化を図ることができる。
【選択図】図1
Description
また、複数の円図形の描画が指定された場合には、処理の繰り返しが増えるため、多大な負荷となる場合があるといった課題があった。
また、円図形から分割された直線の座標は、ラスター毎に計算されていた。そのため、ラインジョイン処理・ラインキャップ処理において補間図形として円が指定された場合等、多数の円図形の描画が指定された場合には、多大な負荷が掛かるという課題があった。
本発明は、このような問題点に鑑みてなされたものであり、真円のエッジの部分を複数の直線に分割して真円を描画するに際し、当該直線の端点の情報を高速に生成することを目的とする。
(第1の実施形態)
まず、本発明の第1の実施形態について説明する。
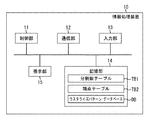
図1は、情報処理装置10の構成の一例を示す図である。情報処理装置10は、制御部11と、通信部12と、入力部13と、記憶部14と、表示部15とを有している。
制御部11は、例えばCPU等を用いて構成され、情報処理装置10を統括制御する。通信部12は、例えば通信インターフェース等を用いて構成され、外部装置との通信を行う。入力部13は、例えばキーボード及びマウス等を用いて構成され、ユーザによる情報処理装置10に対する入力操作を受け付ける。記憶部14は、例えばROM、RAM、及びHDD等を用いて構成され、情報処理装置10におけるデータ及びコンピュータプログラム等を記憶する。本実施形態では、記憶部14には、後述する分割数テーブルTB1、端点テーブルTB2、及びラスタライズパターン・データベースDBが予め設定(記憶)されている。この他、最大分割半径Rd、最大分割数M、及び最大ラスタライズ半径Rrも記憶部14に予め設定(記憶)されている。ただし、分割数テーブルTB1、端点テーブルTB2、ラスタライズパターン・データベースDB、最大分割半径Rd、最大分割数M、及び最大ラスタライズ半径Rrの少なくとも何れか1つは、情報処理装置10と通信可能な外部装置に記憶されていてもよい。また、これらのパラメータの値は、実施される形態や環境、システムの処理能力に依存する。
最大分割半径Rd、最大分割数M(Mは2以上の整数)は、それぞれ、後述する分割数テーブルTB1、端点テーブルTB2が許容する最大円半径、分割数の最大値である。描画する円図形(真円)の半径rが最大円半径Rdを超える場合、当該円図形については、分割数テーブルTB1、端点テーブルTB2、ラスタライズパターン・データベースDBを用いたレンダリング処理は不可と判断される。この場合、当該円図形については、ベジエ曲線への分割を行う従来の処理が選択される。
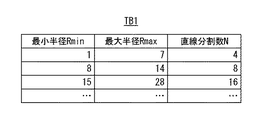
分割数テーブルTB1は、与えられた円図形の半径rから、円の直線分割数N(Nは2以上の整数)を得るためのテーブルである。図2に示すように、分割数テーブルTB1は、直線分割数Nと、当該直線分割数Nを持つ円の最大半径Rmaxと、当該円の最小半径Rminとを構成要素とする。与えられた円図形の半径rを最小半径Rminから最大半径Rmaxまでの間に含む直線分割数Nが分割数テーブルTB1に含まれる。ここで、分割数テーブルTB1の各直線分割数Nは、後述する端点テーブルTB2の効率化のために、最大分割数Mの公約数となるようにすることが望ましい。
端点テーブルTB2は、円図形を複数の直線に分割する際に、各直線(線分)の端点の座標を予め行いテーブル化したものである。各直線の端点の座標は、三角関数等の計算を行うことにより求めることができる。通常、N個に直線分割された線分の端点EPn(xn, yn)(n = 0, 1, ・・・, N-1)は、図3(a)に示すように、円の中心点の座標(xo, yo)、円の半径r、及び基準点からの角度θn[rad]により三角関数を用いて求められる。基準点からの角度θnとは、中心点と基準点EP0とを結ぶ直線と、中心点と端点EPnとを結ぶ直線とのなす角度である。基準点からの角度θnは、円の分割数が定まっていれば基準点EP0を0(ゼロ)とする、N個に直線分割された線分の端点を特定する端点番号nを用いて求めることができ、その値を用いた三角関数の計算も予めテーブル化することが可能である。
ここで、端点テーブルTB2を、円図形の半径r、直線分割数N毎に複数保持する必要はなく、最大分割数Mで作成された端点テーブルTB2を、異なる直線分割数Nの端点のX、Y座標を求める際にも利用でき、単一のテーブルのみで対応できる。その方法として、まず、所望する円図形の直線分割数Nと最大分割数Mとから、端点テーブルTB2の参照間隔をM/Nとする。そして、端点番号nの端点の座標を求める際には、n×M/Nをインデックスとして端点テーブルTB2からデータを取得するようにする(図3(b)の左端を参照)。この方法により、単一の端点テーブルTB2のみで、直線分割数Nに依存せずに、N個に直線分割された線分の端点の座標を得ることができる。したがって、複数のテーブルに冗長な情報を格納するといったことが無く、効率良くデータを保持することが可能である。直線分割で対応可能な分割数(円半径)は、端点テーブルTB2の分割数に依存するため、端点テーブルTB2の分割数(最大分割数M)は出来得る限り大きな値であることが望ましい。このように本実施形態では、端点テーブルTB2には、M個のインデックスがある。
Xn=xo+r×sin(θn) ・・・(1)
Yn=yo−r×cos(θn) ・・・(2)
θn=n×2π/N ・・・(3)
Xn=xo+r×TB2[n×M/N, 1] ・・・(4)
Yn=yo−r×TB2[n×M/N, 2] ・・・(5)
ここで、TB2[n×M/N, 1]は、端点テーブルTB2のインデックスn×M/NのD_xの値を示し、TB2[n×M/N, 2]は、端点テーブルTB2のインデックスn×M/NのD_yを示す。
ラスタライズパターン・データベースDBは、分割された線分の描画内容を表すラスタライズデータをデータベース化したものである。
図4は、分割後の線分からラスタライズパターン・データベースDBを用いてラスタライズデータを得る手法の一例を説明する図である。
図4に示すように、ラスタライズパターン・データベースDBは、開始位置CP及び終了位置NP(両端点)の相対的な位置関係の一例として、両端点の座標を整数化したものの差分(dx, dy)と該差分の最大値MAX(dx, dy)をインデックスとする。また、ラスタライズパターン・データベースDBは、分割された線分のラスタライズパターン・データとして、例えば、直前のラスターに対するX方向の変化分及びY方向の変化分(l_dx, l_dy)を格納する。
ここで、円図形から分割される線分の長さ、傾きは限られている。したがって、ラスタライズパターン・データ83として、線分の全てのラスタライズパターンをデータベース化する必要はない。このように、必要なラスタライズパターン・データのみを保持することで、格納するデータ量を削減し、処理の効率化を図ることができる。
円図形のベクトルデータの描画が指定されると、ステップS1において、制御部11は、描画対象の円図形の半径rが最大分割半径Rd以下であるか否かを判定する。この判定の結果、指定された円図形の半径rが最大分割半径Rd以下である場合には、ステップS2に進み、分割数テーブルTB1と端点テーブルTB2とを用いた後述する円図形の直線分割処理が実行される。
一方、指定された円図形の半径rが最大分割半径Rd以下でない場合には、ステップS3に進み、後述する曲線分割処理を経て直線分割を行う従来手法に基づく直線分割処理が実行される。
ステップS4の判定の結果、円図形の半径rが最大ラスタライズ半径Rr以下でない場合、又はステップS3の処理が実行された場合には、ステップS6に進む。そして、各線分について、ラスター単位で表示装置における座標の算出を行う従来手法に基づくラスタライズ処理が実行される。
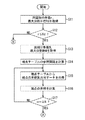
まず、円図形のベクトルデータの描画が指示されると、図6のステップS11において制御部11は、描画対象の円図形の半径rと、最大分割半径Rdとを取得する。
次に、ステップS12において、制御部11は、描画対象の円図形の半径rが最大分割半径Rd以下であるか否かを判定する。この判定の結果、描画対象の円図形の半径rが最大分割半径Rd以下である場合には、分割数テーブルTB1及び端点テーブルTB2を用いた端点の座標の算出が可能と判断してステップS13に進む。一方、描画対象の円図形の半径rが最大分割半径Rd以下でない場合には、分割数テーブルTB1及び端点テーブルTB2を用いた端点の座標の算出は不可と判断し、図8のステップS25に進む。後述するように、ステップS25以降では、円図形を複数の曲線ベクトルに分割した後に直線分割する従来手法に基づく直線分割処理が行われる。
このように本実施形態では、例えば、ステップS13の処理を実行することにより第1の導出手段の一例が実現され、分割数テーブルTB1を用いることにより第1の記憶領域の一例が実現される。
次に、ステップS14において、制御部11は、最大分割数Mで作成された単一の端点テーブルTB2から所望の直線分割数Nに対応したデータの参照を可能とするための参照間隔M/Nを計算する。
次に、ステップS15において、制御部11は、端点番号n(n = 0, 1, ・・・、N-1)と参照間隔M/Nとから、端点テーブルTB2の参照インデックスをn×M/Nとして所望の端点の座標算出用データD_x、D_yを取得する。
以上のように本実施形態では、例えば、ステップS14〜S17の処理を実行することにより第2の導出手段の一例が実現され、端点テーブルTB2を用いることにより第2の記憶領域の一例が実現される。
次に、ステップS19において、制御部11は、描画対象の円図形の半径rが最大ラスタライズ半径Rr以下であるか否かを判定する。この判定の結果、描画対象の円図形の半径rが最大ラスタライズ半径Rr以下である場合には、ラスタライズパターン・データベースDBを用いたラスタライズ処理が可能と判断してステップS20へ進む。一方、描画対象の円図形の半径rが最大ラスタライズ半径Rr以下でない場合には、図9のステップS31に進む。ステップS31では、後述するように、各線分について、表示装置における座標の算出をラスター単位で行う従来手法に基づくラスタライズ処理が実行される。
次に、ステップS21において、制御部11は、ステップS20で計算した差分dnの最大値MAX(dx, dy)を計算する。
次に、ステップS22において、制御部11は、差分dnと、当該差分dnの最大値MAX(dx, dy)とをインデックスとしてラスタライズパターン・データベースDBから、所望の線分のラスタライズパターン・データを一意に取得する。
次に、ステップS23において、制御部11は、線分の開始端点CPに、ステップS22で取得したラスタライズパターン・データを順次加算することで線分の表示装置における座標を高速に求める。
以上のように本実施形態では、例えば、ステップS20〜24の処理を実行することにより第3の導出手段の一例が実現され、ラスタライズパターン・データベースDBを用いることにより第3の記憶領域の一例が実現される。
ステップS25に進むと、制御部11は、円図形のベジエ曲線(以下の説明では必要に応じて分割曲線Cnと称する)への分割数Ncを1象限1曲線として計算する。
次に、ステップS26において、制御部11は、分割曲線Cn(n = 1, 2, ・・・, Nc)の開始点、終了点を含む制御点を計算する。制御点の計算は、特許文献3に記載されているように公知の技術であるので、ここでは、詳細な説明を省略する。
次に、ステップS27において、制御部11は、直線近似方法を用いて、ステップS26で計算された制御点から分割曲線Cnの直線分割数Nnを計算する。直線近似方法は、特許文献4に記載されているように公知の技術であるので、ここでは、詳細な説明を省略する。
次に、ステップS29において、制御部11は、現在のiに1を加算したものが、分割曲線Cnの直線分割数Nn以上であるか否かを判定する。この判定の結果、現在のiに1を加算したものが、分割曲線Cnの直線分割数Nn以上でない場合には、ステップS28に戻り、現在のiに1を加算したものを現在のiとし、当該i番目の分割線分Siの両端点の座標を計算する。
一方、現在のiに1を加算したものが、分割曲線Cnの直線分割数Nn以上となり、分割曲線Cnの各分割線分Siの両端点の座標が計算されると、ステップS30に進む。ステップS30に進むと、制御部11は、現在の端点番号nに1を加算したものが、分割曲線Cnの分割数Nc以上であるか否かを判定する。この判定の結果、現在の端点番号nに1を加算したものが、分割曲線Cnの分割数Nc以上でない場合には、ステップS26に戻り、現在の端点番号nに1を加算したものを現在の端点番号nとし、当該端点番号nについて処理を実行する。このようにして、ステップS26〜S29の処理をNc個の分割曲線毎に繰り返し、円図形の直線分割が行われると、図9のステップS31に進む。図8のフローチャートが実行された場合、円図形の半径rが大きく、直線分割後の各線分のラスタライズパターンが多数あると判断される。そこで、本実施形態では、図8のフローチャートが実行された場合には、図9のフローチャートを実行し、各線分について、ラスター単位で表示装置における座標の算出を行う従来手法に基づくラスタライズ処理が行われる。
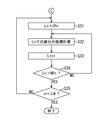
次に、ステップS32において、制御部11は、線分Snの処理ラスター位置Lnにおける表示装置上の座標を計算する。その後、ステップS33において、制御部11は、現在の処理ラスター位置Lnに1を加算し、現在の処理ラスター位置を次の位置(ラスター)へ移動させる。
次に、ステップS34において、制御部11は、現在の処理ラスター位置Lnが、線分Snの終了点NPnを超えたか否かを判定する。この判定の結果、現在の処理ラスター位置Lnが、線分Snの終了点NPnを超えていない場合には、ステップS32に戻り、現在の処理ラスター位置Lnについて処理を行う。そして、現在の処理ラスター位置Lnが、線分Snの終了点NPnを超え、線分Snの終了点NPnの座標が計算されると(線分Snのラスタライズ処理が行われると)、ステップS35に進む。
ステップS35に進むと、制御部11は、現在の端点番号nに1を加算したものが、描画対象の円図形の直線分割数N以上であるか否かを判定する。この判定の結果、現在の端点番号nに1を加算したものが、描画対象の円図形の直線分割数N以上でない場合には、ステップS15に戻り、現在の端点番号nに1を加算したものを現在の端点番号nとし、当該端点番号nについて処理を実行する。このようにして、ステップS31〜S34の線分のラスタライズ処理がN個の線分毎に繰り返し行われ、円図形のラスタライズ処理が行われると、本フローチャートによる処理を終了する。
また、本実施形態では、線分をラスタライズしたデータをラスタライズパターンとして、線分の両端点の座標の差分と対応付けてラスタライズパターン・データベースDBに予め登録しておく。したがって、線分とラスター(スキャンライン)との交点の座標をその都度(スキャンライン毎に)計算することなく線分を描画することが可能になる。
また、本実施形態では、円図形が幾つの直線に分割されるかを、当該円図形の半径rと対応付けて分割数テーブルTB1に登録した場合を例に挙げて説明した。しかしながら、円図形の半径rの代わりに、円図形の直径や円周等、円図形(真円)の大きさの情報を用いるようにしてもよい。
また、本実施形態では、円図形の半径rと、最大分割半径Rd及び最大ラスタライズ半径Rrとの比較結果に応じて処理を切り替えるようにした。しかしながら、最大分割半径Rd及び最大ラスタライズ半径Rrの少なくとも何れか一方を設定せずに、図6のステップS13、S20以降の処理を無条件で実行するようにしてもよい。
また、本実施形態では、情報処理装置10が画像描画装置の一例である場合について説明したが、画像描画装置は、印刷装置等であってもよい。
次に、本発明の第2の実施形態について説明する。前述した第1の実施形態では、一般的な円図形(の全部)を描画する場合を例に挙げて説明した。これに対し、本実施形態では、ラインジョイン処理、ラインキャップ処理において、補間図形として円が指定された場合の描画について説明する。この場合には、円図形の必要な一部だけを選択し描画する必要がある。このように本実施形態と前述した第1の実施形態とは、ラスタライズ処理の対象となる図形が異なることによる処理(曲線の図形を複数の直線に分割し、分割した直線の端点の座標を導出する処理)が主として異なる。したがって、本実施形態の説明において、前述した第1の実施形態と同一の部分については、図1〜図9に付した符号と同一の符号を付す等して詳細な説明を省略する。
図10(a)に示すように、線幅のある線の描画を行う場合、折れ線部分に隙間51が発生する。この隙間51を直線、折れ線、円等の所定の形状で、図10(b)に示すように補間する処理がラインジョイン処理である。一方、図10(a)に示すように、線幅のある線の描画を行う場合に線端52を直線、円等の所定の形状で図10(b)に示すように補間する処理がラインキャップ処理である。
図11(a)に示すように、線幅wを持つ折れ線を、ラインジョイン処理において、円で補間して描画する場合、折れ線の隙間を破線141で示す形状に円図形で補間する必要がある。以下の説明では、必要に応じてこの円図形を補間円図形と称する。
図12は、直線分割処理の一例を説明するフローチャートであり、図6の代わりに実行されるものである。本実施形態においても、第1の実施形態で説明したように、予めパラメータが設定される。
まず、図12のステップS41において、制御部11は、補間円図形の半径rと、最大分割数Rdとを取得する。このとき、ラインジョイン処理、ラインキャップ処理における補間円図形の半径rは、描画線分(折れ線)の線幅wの2分の1となるので、制御部11は、まず線幅wを取得し、取得した線幅wを1/2倍したものを補間円図形の半径rとして求める。
一方、描画対象の円図形の半径rが最大分割半径Rd以下である場合には、ステップS43に進む。ステップS43に進むと、制御部11は、描画対象の円図形の半径rを用いて分割数テーブルTB1から、描画対象の円図形(1周分の円)の直線分割数Nを直接取得すると共に、最大分割数Mを取得する。
このように本実施形態では、例えば、ステップS43の処理を実行することにより第1の導出手段の一例が実現され、分割数テーブルTB1を用いることにより第1の記憶領域の一例が実現される。
次に、ステップS44において、制御部11は、最大分割数Mで作成された単一の端点テーブルTB2から所望の直線分割数Nに対応したデータ参照を可能とするための参照間隔M/Nを計算する。
そこで、ステップS45において、制御部11は、必要な端点の開始端点番号nsと終了端点番号neとを計算する。その方法として、まず、制御部11は、基準点EP0から各角点SP、FPまでの角度θs、θe[rad]を求める。ここで、基準点EP0から角点SPまでの角度θsは、中心点と基準点EP0とを結ぶ直線と、中心線と角点SPとを結ぶ直線とのなす角度である。また、基準点EP0から角点FPまでの角度θeは、中心点と基準点EP0とを結ぶ直線と、中心線と角点FPとを結ぶ直線とのなす角度である。次に、制御部11は、端点の開始端点番号nsを(n−1)×2π/M<θs≦n×2π/Mを満たすnとして計算する。同様に制御部11は、端点の終了端点番号neをn×2π/M≦θe<(n+1)×2π/Mを満たすnとして計算する。これにより、円図形の描画に必要な端点番号が求まる。端点の開始端点番号nsが求まると、ステップS46において、制御部11は、端点座標計算の開始点をn=nsとしてセットする。
次に、ステップS48において、制御部11は、ステップS47で取得した座標算出用データD_x、D_yを用いて、端点EPnの座標(xn, yn)を、前述した(4)式、(5)式により計算する。本実施形態でも、制御部11は、異なる象限の端点テーブルTB2の座標算出用データを所望の端点の座標算出用データに適応させる手段を有する。
以上のように本実施形態では、例えば、ステップS44〜S49の処理を実行することにより第2の導出手段の一例が実現され、端点テーブルTB2を用いることにより第2の記憶領域の一例が実現される。
本発明は、以下の処理を実行することによっても実現される。即ち、上述した実施形態の機能を実現するソフトウェア(プログラム)を、ネットワーク又は各種記憶媒体を介してシステム或いは装置に供給し、そのシステム或いは装置のコンピュータ(またはCPUやMPU等)がプログラムを読み出して実行する処理である。
Claims (9)
- 真円のベクトルデータの一部または全部を、複数の直線に分割し、分割した複数の直線に基づいて、当該真円の一部または全部をラスタライズする画像描画装置であって、
前記真円の分割数を、真円の大きさに係る情報に対して分割数に係る情報が予め登録された第1の記憶領域を参照して導出する第1の導出手段と、
前記真円のベクトルデータの一部または全部を、前記第1の導出手段により導出された分割数で分割することにより得られる複数の直線の端点の位置を、分割数に係る情報に対して端点の位置に係る情報が予め登録された第2の記憶領域を参照して導出する第2の導出手段と、
前記第2の導出手段により導出された位置に端点を有する複数の直線に基づいて、前記真円の一部または全部をラスタライズする描画手段と、を有することを特徴とする画像描画装置。 - 前記第2の記憶領域には、予め定められているM個の分割数に係る情報に対して端点の位置に係る情報が登録されており、
前記第2の導出手段は、前記第1の導出手段により導出された分割数であるNがMよりも小さい場合には、M/Nの間隔で、前記第2の記憶領域に登録されている端点の位置に係る情報を読み出すことを特徴とする請求項1に記載の画像描画装置。 - 前記第2の記憶領域には、分割数に応じた端点の位置であって、真円の一部分に対応する端点の位置に係る情報が登録されており、
前記第2の導出手段は、前記第2の記憶領域に登録されていない真円の他の部分に対応する端点の位置に係る情報を、前記第2の記憶領域に登録されている情報を用いて導出することを特徴とする請求項1又は2に記載の画像描画装置。 - 前記第1の導出手段は、前記真円の大きさが、予め定められた大きさよりも小さい場合に、当該真円の分割数を、前記第1の記憶領域を参照して導出することを特徴とする請求項1〜3の何れか1項に記載の画像描画装置。
- 前記描画手段は、前記第2の導出手段により導出された位置に端点を有する直線の描画内容を表すラスタライズパターンを、直線の両端点の相対的な位置関係に係る情報に対して当該直線のラスタライズパターンに係る情報が予め登録された第3の記憶領域を参照して導出することを特徴とする請求項1〜4の何れか1項に記載の画像描画装置。
- 前記第3の記憶領域には、直線の両端点の相対的な位置関係に応じた当該直線のラスタライズパターンであって、真円の一部分に対応する当該直線のラスタライズパターンに係る情報が登録されており、
前記描画手段は、前記第3の記憶領域に登録されていない真円の他の部分に対応する直線のラスタライズパターンに係る情報を、前記第3の記憶領域に登録されている情報を用いて導出することを特徴とする請求項5に記載の画像描画装置。 - 前記第3の導出手段は、前記真円の大きさが、予め定められた大きさよりも小さい場合に、前記第2の導出手段により導出された位置に端点を有する直線の描画内容を表すラスタライズパターンを、前記第3の記憶領域を参照して導出することを特徴とする請求項5又は6に記載の画像描画装置。
- 真円のベクトルデータの一部または全部を、複数の直線に分割し、分割した複数の直線に基づいて、当該真円の一部または全部をラスタライズする画像描画方法であって、
前記真円の分割数を、真円の大きさに係る情報に対して分割数に係る情報が予め登録された第1の記憶領域を参照して導出する第1の導出工程と、
前記真円のベクトルデータの一部または全部を、前記第1の導出工程により導出された分割数で分割することにより得られる複数の直線の端点の位置を、分割数に係る情報に対して端点の位置に係る情報が予め登録された第2の記憶領域を参照して導出する第2の導出工程と、
前記第2の導出工程により導出された位置に端点を有する複数の直線に基づいて、前記真円の一部または全部をラスタライズする描画工程と、を有することを特徴とする画像描画方法。 - 請求項1〜7の何れか1項に記載の画像描画装置の各手段としてコンピュータを機能させることを特徴とするコンピュータプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009234394A JP5479017B2 (ja) | 2009-10-08 | 2009-10-08 | 画像描画装置、画像描画方法、及びコンピュータプログラム |
| US12/896,683 US20110084968A1 (en) | 2009-10-08 | 2010-10-01 | Image drawing apparatus, image drawing method, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009234394A JP5479017B2 (ja) | 2009-10-08 | 2009-10-08 | 画像描画装置、画像描画方法、及びコンピュータプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011081663A true JP2011081663A (ja) | 2011-04-21 |
| JP2011081663A5 JP2011081663A5 (ja) | 2012-11-22 |
| JP5479017B2 JP5479017B2 (ja) | 2014-04-23 |
Family
ID=43854492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009234394A Expired - Fee Related JP5479017B2 (ja) | 2009-10-08 | 2009-10-08 | 画像描画装置、画像描画方法、及びコンピュータプログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20110084968A1 (ja) |
| JP (1) | JP5479017B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115115799B (zh) * | 2021-03-19 | 2026-03-10 | 北京百度网讯科技有限公司 | 空间线的绘制方法、装置、设备、存储介质和程序产品 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63140382A (ja) * | 1986-12-02 | 1988-06-11 | Fujitsu Ltd | 円類の多角形近似描画方法 |
| JPH02254576A (ja) * | 1989-03-29 | 1990-10-15 | Ricoh Co Ltd | 直線描画方法 |
| JPH08221585A (ja) * | 1995-02-14 | 1996-08-30 | Toshiba Corp | 円の描画方式 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2207839B (en) * | 1987-07-30 | 1991-07-10 | Ibm | Line generation in a display system |
| JPH1011592A (ja) * | 1996-06-19 | 1998-01-16 | Canon Inc | 図形処理装置及び方法 |
| US6700576B1 (en) * | 1999-03-25 | 2004-03-02 | 3Dlabs, Inc., Ltd. | Variable stride circle rendering apparatus and method |
-
2009
- 2009-10-08 JP JP2009234394A patent/JP5479017B2/ja not_active Expired - Fee Related
-
2010
- 2010-10-01 US US12/896,683 patent/US20110084968A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63140382A (ja) * | 1986-12-02 | 1988-06-11 | Fujitsu Ltd | 円類の多角形近似描画方法 |
| JPH02254576A (ja) * | 1989-03-29 | 1990-10-15 | Ricoh Co Ltd | 直線描画方法 |
| JPH08221585A (ja) * | 1995-02-14 | 1996-08-30 | Toshiba Corp | 円の描画方式 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110084968A1 (en) | 2011-04-14 |
| JP5479017B2 (ja) | 2014-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20150116367A1 (en) | Information processing device, display enlarging method, and computer readable medium | |
| JP4370438B2 (ja) | ベクター画像描画装置、ベクター画像描画方法およびプログラム | |
| US5524198A (en) | Character or graphic processing method and apparatus | |
| JP2013097392A (ja) | 警告表示方法および警告表示プログラム | |
| JP5479017B2 (ja) | 画像描画装置、画像描画方法、及びコンピュータプログラム | |
| JP6025427B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP6297169B2 (ja) | 描画装置、および描画方法 | |
| CN102436357A (zh) | 图像处理装置及图像处理方法 | |
| JP2019121061A (ja) | 画像拡大装置 | |
| JP6278716B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP6590606B2 (ja) | 画像処理装置、画像処理方法、プログラム | |
| JP2013539880A (ja) | ラスター化方法とラスター化装置 | |
| JP2008054271A (ja) | 画像処理装置、及び、プログラム | |
| JP2005107871A (ja) | 画像表示方法と装置、該方法によるプログラムとこれを格納した記録媒体 | |
| US20060119897A1 (en) | Output apparatus and program thereof | |
| JP5134585B2 (ja) | 変倍画像生成装置および変倍画像生成法 | |
| JPH1131231A (ja) | 画像形成装置およびグラデーション描画方法 | |
| JP5614953B2 (ja) | 画像処理装置および画像処理方法 | |
| JP4710508B2 (ja) | 画像処理プログラム、画像処理装置 | |
| JP2011081663A5 (ja) | ||
| JP6021690B2 (ja) | 数値制御装置 | |
| JP3485055B2 (ja) | 台形描画方法および台形描画装置 | |
| JP2001273508A (ja) | 画像処理装置 | |
| JP2017211579A (ja) | 文字作成装置 | |
| JPH11213178A (ja) | 3次元データ表示装置および3次元データ変換プログラムを記録した記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121009 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121009 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131008 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140212 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5479017 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |