JP2011190881A - 無段変速機 - Google Patents
無段変速機 Download PDFInfo
- Publication number
- JP2011190881A JP2011190881A JP2010058135A JP2010058135A JP2011190881A JP 2011190881 A JP2011190881 A JP 2011190881A JP 2010058135 A JP2010058135 A JP 2010058135A JP 2010058135 A JP2010058135 A JP 2010058135A JP 2011190881 A JP2011190881 A JP 2011190881A
- Authority
- JP
- Japan
- Prior art keywords
- rotating
- rotation
- center axis
- continuously variable
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Landscapes
- Friction Gearing (AREA)
Abstract
【課題】正駆動、逆駆動に拘わらず十分な動力伝達効率を確保すること。
【解決手段】共通の第1回転中心軸R1を有する第1及び第2の回転部材10,20と、第1回転中心軸R1とは別の第2回転中心軸R2を有し、第1回転部材10と第2回転部材20とで挟持されて当該第1及び第2の回転部材10,20との間におけるトルク伝達を可能にする遊星ボール50と、遊星ボール50を傾転させることで第1及び第2の回転部材10,20の間の回転比を変化させる変速制御部(溝52a,53a等)と、第1回転部材10に対して遊星ボール50に向けた押圧力を発生させるトルクカム13と、回転中の第2回転部材20に対して当該回転方向とは逆向きのトルクが入力される逆駆動のときに遊星ボール50から加えられたスラスト力を当該遊星ボール50に対する押圧力として第2回転部材20に伝える第1副押圧部(環状部60a等)と、を備えること。
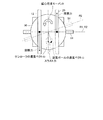
【選択図】図1
【解決手段】共通の第1回転中心軸R1を有する第1及び第2の回転部材10,20と、第1回転中心軸R1とは別の第2回転中心軸R2を有し、第1回転部材10と第2回転部材20とで挟持されて当該第1及び第2の回転部材10,20との間におけるトルク伝達を可能にする遊星ボール50と、遊星ボール50を傾転させることで第1及び第2の回転部材10,20の間の回転比を変化させる変速制御部(溝52a,53a等)と、第1回転部材10に対して遊星ボール50に向けた押圧力を発生させるトルクカム13と、回転中の第2回転部材20に対して当該回転方向とは逆向きのトルクが入力される逆駆動のときに遊星ボール50から加えられたスラスト力を当該遊星ボール50に対する押圧力として第2回転部材20に伝える第1副押圧部(環状部60a等)と、を備えること。
【選択図】図1
Description
本発明は、入出力間の回転速度(回転数)を無段階に変化させることが可能な無段変速機に関する。
従来、回転軸としてのシャフトと、このシャフトの中心軸を第1回転中心軸とする相対回転可能な複数の回転要素と、その第1回転中心軸と平行な別の第2回転中心軸を有し、第1回転中心軸を中心にして放射状に複数配置した転動部材と、を備え、対向させて配置した第1回転要素と第2回転要素とで各転動部材を挟持すると共に、各転動部材を第3回転要素の外周面上に配置した所謂トラクション遊星ギヤ機構の無段変速機が知られている。この種の無段変速機においては、軸線方向の押圧力を第1回転要素及び第2回転要素の内の少なくとも一方から転動部材に加え、これらの間に摩擦力(トラクション力)を発生させることで、これらの間での動力(トルク)の伝達を実現させる。例えば、下記の特許文献1には、シャフトを中心に放射状に配置した複数のボール(転動部材)について、サンローラ(回転要素)の外周面上に配設し、且つ、回転要素たる入力ディスクと出力ディスクとで挟持させた無段変速機が記載されている。この特許文献1の無段変速機においては、加速等の正駆動時に、ボールとサンローラとの間で発生したシャフト軸線方向のスラスト力をボールからサンローラに伝達し、更にシャフトを介して入力ディスクに伝えることができるよう構成されている。これが為、この無段変速機においては、正駆動時にはそのスラスト力を利用して入力ディスクからボールへの押圧力を発生させることができる。
尚、下記の特許文献2には、出力筒に加わる両方向(正駆動時の方向と減速等の逆駆動時の方向)のスラスト荷重を支承自在にする玉軸受が配設されたトロイダル型の無段変速機が開示されている。
しかしながら、上記特許文献1に記載の無段変速機では、逆駆動時に発生した正駆動時とは逆方向のスラスト力をボールへの押圧力として利用できない。これが為、逆駆動時には、正駆動時よりも動力伝達効率が低下してしまう。
そこで、本発明は、かかる従来例の有する不都合を改善し、正駆動、逆駆動に拘わらず十分な動力伝達効率を確保できる無段変速機を提供することを、その目的とする。
上記目的を達成する為、本発明は、対向させて相対回転可能に配置した共通の第1回転中心軸を有する第1及び第2の回転要素と、前記第1回転中心軸とは別の第2回転中心軸を有し、前記第1回転要素と前記第2回転要素とで挟持されて当該第1及び第2の回転要素との間におけるトルク伝達を可能にする転動部材と、前記転動部材を傾転させることで前記第1及び第2の回転要素の間の回転比を変化させる変速制御部と、前記第1又は第2の回転要素の内の少なくとも一方に対して前記転動部材に向けた押圧力を発生させる主押圧部と、回転中の前記第1又は第2の回転要素の内の一方に対して当該回転方向とは逆向きのトルクが入力される逆駆動のときに前記転動部材から加えられたスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の一方に伝える副押圧部と、を備えることを特徴としている。
ここで、前記第1又は第2の回転要素の内の一方を入力トルクと同じ向きに回転させる正駆動のときに前記転動部材から加えられた前記逆駆動時とは逆向きのスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の一方に伝える別の副押圧部を更に設けることが望ましい。
更に、前記主押圧部による押圧力と前記副押圧部による押圧力との合計が設計トラクション係数に応じた大きさとなるように当該主押圧部を設定することが望ましい。
また、前記主押圧部は、発生させる押圧力の大きさの制御が可能なものとし、前記主押圧部による押圧力と前記副押圧部による押圧力との合計が設計トラクション係数に応じた大きさとなるように当該主押圧部による押圧力を制御することが望ましい。
また、上記目的を達成する為、本発明は、対向させて相対回転可能に配置した共通の第1回転中心軸を有する第1及び第2の回転要素と、前記第1回転中心軸とは別の第2回転中心軸を有し、前記第1回転要素と前記第2回転要素とで挟持されて当該第1及び第2の回転要素との間におけるトルク伝達を可能にする転動部材と、前記転動部材を傾転させることで前記第1及び第2の回転要素の間の回転比を変化させる変速制御部と、前記第1又は第2の回転要素の内の一方を入力トルクと同じ向きに回転させる正駆動のときに前記転動部材から加えられたスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の一方に伝える第1副押圧部と、前記正駆動時の前記第1又は第2の回転要素の内の他方に対して当該回転方向とは逆向きのトルクが入力される逆駆動のときに前記転動部材から加えられた前記正駆動時とは逆向きのスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の前記正駆動時とは異なる方に伝える第2副押圧部と、を備えることを特徴としている。
これらの無段変速機においては、前記第1回転中心軸を有すると共に当該第1回転中心軸を中心に放射状に複数個配置した前記転動部材の転動面となる外周面を有し、前記第1及び第2の回転要素に対する相対回転が可能な第3回転要素と、前記第1回転中心軸を有し、前記第1から第3の回転要素に対する相対回転が可能で且つ前記第1回転中心軸を中心にして前記各転動部材を回転させることが可能な第4回転要素と、を設け、前記第1から第4の回転要素の内の何れか1つを前記第1回転中心軸を中心にして回転させぬようにすることが望ましい。
本発明に係る無段変速機は、逆駆動時においてもスラスト力を利用して転動部材に押圧力を発生させることができるので、正駆動時であると逆駆動時であるとに拘わらず、転動部材に向けた押圧力の発生が可能になる。これが為、この無段変速機は、第1及び第2の回転要素と転動部材との間の摩擦力(トラクション力)を増加させることが可能になり、良好な動力(トルク)の伝達効率を得ることができる。従って、この無段変速機においては、正駆動、逆駆動に拘わらず十分な動力伝達効率を確保することができる。
以下に、本発明に係る無段変速機の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
[実施例]
本発明に係る無段変速機の実施例を図1から図8に基づいて説明する。
本発明に係る無段変速機の実施例を図1から図8に基づいて説明する。
最初に、本実施例の無段変速機の一例について図1を用いて説明する。図1の符号1は、本実施例の無段変速機を示す。
この無段変速機1の主要部を成す無段変速機構は、共通の第1回転中心軸R1を有する相互間での相対回転が可能な第1から第4の回転要素10,20,30,40と、その第1回転中心軸R1と後述する基準位置において平行な別の第2回転中心軸R2を各々有する複数の第5回転要素50と、第1から第4の回転要素10,20,30,40の回転中心に配置した変速機回転軸としてのシャフト60と、を備えた所謂トラクション遊星ギヤ機構と云われるものである。この無段変速機1は、第2回転中心軸R2を第1回転中心軸R1に対して傾斜させ、第5回転要素50を傾転させることによって、入出力間の変速比を変えるものである。以下においては、特に言及しない限り、その第1回転中心軸R1や第2回転中心軸R2に沿う方向を軸線方向と云い、その第1回転中心軸R1周りの方向を周方向と云う。また、その第1回転中心軸R1に直交する方向を径方向と云い、その中でも、内方に向けた側を径方向内側と、外方に向けた側を径方向外側と云う。この無段変速機1においては、第1から第4の回転要素10,20,30,40の内の何れか1つを周方向へと回転させぬよう固定し、その内の残りが周方向に回転できるようになっている。
この無段変速機1においては、第1回転要素10と第2回転要素20と第3回転要素30と第4回転要素40との間で各第5回転要素50を介したトルクの伝達が行われる。例えば、この無段変速機1においては、第1から第4の回転要素10,20,30,40の内の1つがトルク(動力)の入力部となり、残りの回転要素の内の少なくとも1つがトルクの出力部となる。これが為、この無段変速機1においては、入力部となる何れかの回転要素と出力部となる何れかの回転要素との間の回転速度(回転数)の比が変速比となる。例えば、この無段変速機1は、車両の動力伝達経路上に配設される。その際には、その入力部がエンジンやモータ等の動力源側に連結され、その出力部が駆動輪側に連結される。この無段変速機1においては、入力部としての回転要素にトルクが入力された場合の各回転要素の回転動作を正駆動と云い、出力部としての回転要素に正駆動時とは逆方向のトルクが入力された場合の各回転要素の回転動作を逆駆動と云う。例えば、この無段変速機1は、先の車両の例示に従えば、加速等の様に動力源側からトルクが入力部たる回転要素に入力されて当該回転要素を回転させているときが正駆動となり、減速等の様に駆動輪側から出力部たる回転中の回転要素に正駆動時とは逆方向のトルクが入力されているときが逆駆動となる。
この無段変速機1においては、シャフト60の中心軸(第1回転中心軸R1)を中心にして放射状に複数個の第5回転要素50を配置する。その夫々の第5回転要素50は、対向させて配置した第1回転要素10と第2回転要素20とで挟持させると共に、第3回転要素30の外周面上に配設する。また、夫々の第5回転要素50は、自身の回転中心軸(第2回転中心軸R2)を中心にした自転を行う。更に、第5回転要素50は、第4回転要素40が上記の固定対象になっていなければ、その第4回転要素40と一緒に回転して、第1回転中心軸R1を中心にした公転を行う。この無段変速機1は、第1及び第2の回転要素10,20の内の少なくとも一方を第5回転要素50に押し付けることによって、第1から第4の回転要素10,20,30,40と第5回転要素50との間に適切な摩擦力(トラクション力)を発生させ、その間におけるトルクの伝達を可能にする。また、この無段変速機1は、夫々の第5回転要素50を自身の第2回転中心軸R2と第1回転中心軸R1とを含む平面上で傾転させ、第1回転要素10と第2回転要素20との間の回転速度(回転数)の比を変化させることによって、入出力間の回転速度(回転数)の比を変える。
ここで、この無段変速機1においては、第1及び第2の回転要素10,20が遊星歯車機構で云うところのリングギヤの機能を為すものとなる。また、第3回転要素30はトラクション遊星ギヤ機構のサンローラとして機能し、第4回転要素40はキャリアとして機能する。また、第5回転要素50は、トラクション遊星ギヤ機構におけるボール型ピニオンとして機能する。以下、第1及び第2の回転要素10,20については、各々「第1及び第2の回転部材10,20」と云う。また、第3回転要素30については「サンローラ30」と云い、第4回転要素40については「キャリア40」と云う。また、第5回転要素50については、「遊星ボール50」と云う。以下においては、キャリア40が上記の固定対象になっている場合を例に挙げて詳述する。
第1及び第2の回転部材10,20は、第1回転中心軸R1を回転軸とする円盤部材(ディスク)や円環部材(リング)であり、軸線方向で対向させて各遊星ボール50を挟み込むように配設する。具体的に、この第1及び第2の回転部材10,20には、シャフト60を挿入する為の円形の貫通孔が中心に形成されている。第1及び第2の回転部材10,20は、後述するスラスト軸受TB2,TB1を介してシャフト60に対する周方向の相対回転を行うことができる。また、この第1及び第2の回転部材10,20は、後で詳述する各遊星ボール50の径方向外側の外周曲面と接触する接触面を有している。その夫々の接触面は、例えば、遊星ボール50の外周曲面の曲率と同等の曲率の凹円弧面、その外周曲面の曲率とは異なる曲率の凹円弧面、凸円弧面又は平面等の形状を成している。ここでは、後述する基準位置の状態で第1回転中心軸R1から各遊星ボール50との接触部分までの距離が同じ長さになるように夫々の接触面を形成して、第1及び第2の回転部材10,20の各遊星ボール50に対する夫々の接触角が同じ角度になるようにしている。その接触角とは、基準から各遊星ボール50との接触部分までの角度のことである。ここでは、径方向を基準にしている。その夫々の接触面は、遊星ボール50の外周曲面に対して点接触又は面接触している。また、夫々の接触面は、第1及び第2の回転部材10,20から遊星ボール50に向けて軸線方向の力が加わった際に、その遊星ボール50に対して径方向内側で且つ斜め方向の力が加わるように形成されている。
サンローラ30は、第1回転中心軸R1を回転軸とした円筒状に成型する。このサンローラ30の外周面には、複数個の遊星ボール50が放射状に略等間隔で配置される。従って、このサンローラ30においては、その外周面が遊星ボール50の自転の際の転動面となる。このサンローラ30は、自らの回転動作によって夫々の遊星ボール50を転動(自転)させることもできれば、夫々の遊星ボール50の転動動作(自転動作)に伴って回転することもできる。また、このサンローラ30には、その内周面の軸線方向における中間部分に環状部30aを設ける。環状部30aは、その両側面が第1回転中心軸R1と直交する環状面になっている。
ここで、サンローラ30は、その環状部30aの内方に挿入されたシャフト60に対して周方向に相対回転できるように支持する。その支持は、サンローラ30とシャフト60の間に配設した軸受を介して行う。その軸受は、所謂アンギュラ軸受に相当するものであり、内輪(インナーレース)に相当する軸受部材31,32と、外輪(アウターレース)に相当する軸受部材33,34と、軸受ボール35と、を備える。例えば、軸受部材31,32は、内方にシャフト60を挿入できるよう円筒状に成型し、そのシャフト60上で対向させ且つシャフト60に対する軸線方向への相対移動ができないように配設する。この軸受部材31,32には、軸受ボール35の転動を支える環状の転動面31a,32aが形成される。その転動面31a,32aは、径方向内側に形成された環状の凹曲面と、径方向外側に形成された環状の側壁面と、を有する。その側壁面は、環状部30aの環状面に対して軸線方向で対向させる。一方、軸受部材33,34は、サンローラ30の内周面から環状部30aの環状面に沿わせた形状のものであり、サンローラ30に嵌合等で一体化されている。この軸受部材33,34は、軸受ボール35の転動を支える環状の転動面33a,34aを有する。その転動面33a,34aは、環状部30aの環状面に沿う環状部分に形成されたものであり、環状部30aの環状面と平行にしている。また、軸受ボール35は、その軸受部材31,33の間と軸受部材32,34の間に第1回転中心軸R1を中心にして放射状に複数個配設する。この軸受ボール35は、軸線方向へと力が加えられた際に、その力を転動面31a,32aにおける側壁面へと伝達できるように配置されることが望ましい。
キャリア40は、例えば、第1回転中心軸R1を回転軸とする第1及び第2の円盤部41,42を対向させて配置し、その第1及び第2の円盤部41,42を複数本の連結軸(図示略)で連結して、全体として籠状となるようにする。これにより、このキャリア40は、外周面に開放部分を有することになる。各遊星ボール50は、第1及び第2の円盤部41,42の間に配置し、その開放部分を介してキャリア40の外周面から径方向外側に一部分を突出させている。ここで例示するキャリア40は、前述したように固定対象になっており、周方向への回転を行わせない。
遊星ボール50は、サンローラ30の外周面上を転がる転動部材である。この遊星ボール50は、完全な球状体であることが好ましいが、少なくとも転動方向にて球形を成すもの、例えばラグビーボールの様な断面が楕円形状のものであってもよい。この遊星ボール50は、その中心を通って貫通させた支持軸51によって回転自在に支持する。例えば、遊星ボール50は、支持軸51の外周面との間に配設した軸受(図示略)によって、第2回転中心軸R2を回転軸とした支持軸51に対する相対回転(つまり自転)ができるようにしている。従って、この遊星ボール50は、支持軸51を中心にしてサンローラ30の外周面上を転動することができる。
その支持軸51の基準となる位置は、図1に示すように、第2回転中心軸R2が第1回転中心軸R1と平行になる位置である。この支持軸51は、その基準位置で形成される自身の回転中心軸(第2回転中心軸R2)と第1回転中心軸R1とを含む平面内において、基準位置とそこから傾斜させた位置との間を遊星ボール50と共に揺動(傾転)することができる。その傾転は、その平面内で遊星ボール50の中心を支点にして行われる。
この無段変速機1には、夫々の遊星ボール50を傾転させることによって変速させる変速制御部が設けられている。その遊星ボール50の傾転機構を成す変速制御部としては、この技術分野において周知のものを利用すればよい。例えば、この変速制御部としては、遊星ボール50から突出させた支持軸51の夫々の突出端部の内の少なくとも一方を上述した平面内で動作させるものが考えられる。この変速制御部は、その夫々の突出端部と、一方の突出端部が収められる第1円盤部材52の溝52aと、他方の突出端部が収められる第2円盤部材53の溝53aと、第1円盤部材52又は第2円盤部材53の内の少なくとも一方を他方に対して周方向に相対回転させる駆動装置(図示略)と、を備える。ここでは、駆動装置で第2円盤部材53を回転させる。その夫々の溝52a,53aは、突出端部よりも広い幅と遊星ボール50の傾転角に応じた長さとを有しており、第2円盤部材53の回転に伴い突出端部を上記の平面内で長手方向に案内する形状(例えば弧状や矩形状)になっている。このような形状の夫々の溝52a,53aは、突出端部を上記の平面内に沿って移動させる為に、第1回転中心軸R1を中心とした放射方向に対して傾斜させる。また、駆動装置は、例えば第1円盤部材52又は第2円盤部材53の内の少なくとも一方(ここでは第2円盤部材53)の外周面のネジ部に螺合させたウォームギヤであり、電動モータを電子制御装置(ECU)に制御させることで動作させる。この変速制御部においては、第2円盤部材53の回転に伴い一方の突出端部が図1の紙面下方に動いたならば、他方の突出端部が図1の紙面上方に動く。また、第2円盤部材53を逆回転させたときには、夫々の突出端部が逆方向に上下動する。これにより、この無段変速機1においては、支持軸51に上記の平面に沿った傾転力が付与されるので、その支持軸51と共に遊星ボール50を傾転させることができる。
この無段変速機1においては、夫々の遊星ボール50の傾転角が0度のときに、第1回転部材10と第2回転部材20とが同一回転速度(同一回転数)で回転する。つまり、このときには、第1回転部材10と第2回転部材20の回転比(回転速度又は回転数の比)が1になっている。一方、夫々の遊星ボール50を基準位置から傾転させた際には、第1回転部材10との接触部分(接触点)及び第2回転部材20との接触部分(接触点)が変わり、支持軸51の中心軸から第1回転部材10との接触部分までの距離が変化すると共に、支持軸51の中心軸から第2回転部材20との接触部分までの距離が変化する。これが為、第1回転部材10又は第2回転部材20の内の何れか一方が基準位置のときよりも高速で回転し、他方が低速で回転するようになる。例えば第2回転部材20は、遊星ボール50を一方へと傾転させたときに第1回転部材10よりも低回転になり(減速)、他方へと傾転させたときに第1回転部材10よりも高回転になる(増速)。従って、この無段変速機1においては、その傾転角を変えることによって、第1回転部材10と第2回転部材20との間の回転比を無段階に変化させることができる。尚、ここでの増速時には、図1における上側の遊星ボール50を紙面時計回り方向に傾転させ且つ下側の遊星ボール50を紙面反時計回り方向に傾転させる。また、減速時には、図1における上側の遊星ボール50を紙面反時計回り方向に傾転させ且つ下側の遊星ボール50を紙面時計回り方向に傾転させる。
この無段変速機1には、第1又は第2の回転部材10,20の内の少なくとも何れか一方を各遊星ボール50に押し付けて、第1及び第2の回転部材10,20と各遊星ボール50との間に挟圧力を発生させる押圧部が設けられている。その押圧部は、軸線方向の力(押圧力)を発生させることで、その間に挟圧力を生じさせるものである。その間においては、その挟圧力によって適切な摩擦力(トラクション力)が発生し、入力側となる何れか一方の回転トルクを効率良く他方に伝える。また、その押圧部の押圧力は、第1及び第2の回転部材10,20の接触面と各遊星ボール50の外周曲面の形状及び位置関係によって、各遊星ボール50を介してサンローラ30にも伝わる。これが為、サンローラ30と各遊星ボール50との間にも適切な摩擦力(トラクション力)が発生して、入力側となる何れか一方の回転トルクを効率良く他方に伝える。従って、その押圧力は、各遊星ボール50を介した第1回転部材10と第2回転部材20とサンローラ30との間のトルク伝達を維持し得る大きさとする。
ここでは、第1回転部材10をディスク部11とリング部12とに分割し、その間に押圧部としてトルクカム13を配設する。ディスク部11は、円盤部材であって、スラスト軸受TB2が配設される円盤部と、リング部12の環状面に対向させるべく突設した環状部と、を有する。リング部12は、上述した各遊星ボール50の外周曲面に対する接触面を備えた円環部材である。トルクカム13は、そのディスク部11の環状部とリング部12の夫々の環状面の間に配設する。例えば、このトルクカム13は、図2に示すように、ディスク部11と一体になって回転する第1係合部材13aと、リング部12と一体になって回転する第2係合部材13bと、その第1係合部材13aと第2係合部材13bに挟持されるカムローラ13cと、を有している。その第1係合部材13aと第2係合部材13bは、第1回転中心軸R1を回転軸とする環状部材である。一方、カムローラ13cは、第1係合部材13aと第2係合部材13bの互いに対向する面に各々形成したカム面13dにおいて挟持する。
このトルクカム13は、第1係合部材13a又は第2係合部材13bの回転トルクを軸力Faに変換し、その軸力Faを押圧力としてリング部12に伝えるものである。このトルクカム13においては、第1係合部材13aに正転方向のトルクが入力されているとき又は第2係合部材13bに逆転方向のトルクが入力されているときに、夫々のカム面13dの間隔が狭くなり、その夫々のカム面13dがカムローラ13cを挟み付けて相互に一体化されて、軸力Faを発生させる。これが為、夫々の対向するカム面13dは、一方が基準面に対する軸線方向の間隔を正転時の周方向に向けて徐々に拡げるよう傾斜させ、他方が基準面に対する軸線方向の間隔を正転時の周方向に向けて徐々に狭めるよう傾斜させる。その基準面とは、第1回転中心軸R1に対する垂線を含む仮想平面である。更に、このトルクカム13においては、その夫々のカム面13dに連なる爪13eが第1係合部材13aと第2係合部材13bとに形成されており、第1係合部材13aに逆転方向のトルクが入力されているとき又は第2係合部材13bに正転方向のトルクが入力されているときに、夫々の爪13eがカムローラ13cに引っかかり、軸力Faを発生させはしないが、第1係合部材13aと第2係合部材13bとが一体になって回転する。このトルクカム13においては、カムローラ13cが複数個用意されており、その数に合わせてカム面13dや爪13eも形成する。ここでは、便宜上、一方の周方向の回転を「正転」と云い、これとは逆方向の回転を「逆転」と云う。尚、トルクカム13は、何れの回転要素を入力部にした場合でも、正駆動時と逆駆動時に軸力Faを発生させるように設定することが好ましい。
このトルクカム13においては、入力トルクをTin、カムローラ13cが設けられている箇所の第1回転中心軸R1からの距離(つまりカム半径)をrcamとすると、カムローラ13cを挟み付けている箇所における円周方向(接線方向)の荷重Ftcamは、下記の式1で表すことができる。

そして、第1係合部材13aのカム面13dの傾斜角度(つまりカム角)をα1、第2係合部材13bのカム面13dのカム角をα2とすると、このトルクカム13が発生させる軸力Faは、下記の式2で表すことができる。
この無段変速機1においては、リング部12の回転に伴いリング部12と夫々の遊星ボール50との間に摩擦力(トラクション力Ft)が発生し、夫々の遊星ボール50が自転を始める。そして、この無段変速機1においては、その夫々の遊星ボール50の回転によって、各遊星ボール50と第2回転部材20との間、各遊星ボール50とサンローラ30との間にも摩擦力が発生し、その第2回転部材20とサンローラ30も回転を始める。
また、この無段変速機1においては、第2回転部材20の回転に伴い第2回転部材20と夫々の遊星ボール50との間に摩擦力が発生し、夫々の遊星ボール50が自転を始める。そして、この無段変速機1においては、その夫々の遊星ボール50の回転によって、各遊星ボール50とリング部12との間、各遊星ボール50とサンローラ30との間にも摩擦力が発生し、そのリング部12とサンローラ30も回転を始める。
また、この無段変速機1においては、サンローラ30の回転に伴いサンローラ30と夫々の遊星ボール50との間に摩擦力が発生し、夫々の遊星ボール50が自転を始める。そして、この無段変速機1においては、その夫々の遊星ボール50の回転によって、各遊星ボール50とリング部12との間、各遊星ボール50と第2回転部材20との間にも摩擦力が発生し、そのリング部12と第2回転部材20も回転を始める。
尚、この無段変速機1においては、キャリア40以外の回転要素を固定対象に設定した場合、そのキャリア40の回転に伴い夫々の遊星ボール50が自転と公転を始める。そして、この無段変速機1においては、その夫々の遊星ボール50の回転によって、各遊星ボール50とリング部12との間、各遊星ボール50と第2回転部材20との間、各遊星ボール50とサンローラ30との間にも摩擦力が発生し、そのリング部12と第2回転部材20とサンローラ30も回転を始める。
この無段変速機1においては、正駆動時又は逆駆動時に、トルクカム13で軸力Faが発生し、その軸力Faが押圧力としてリング部12に伝達される。そして、その押圧力は、リング部12、第2回転部材20及びサンローラ30と夫々の遊星ボール50との間の摩擦力を増加させる。これにより、この無段変速機1においては、その間における正駆動時又は逆駆動時のトルクの伝達効率が上昇する。例えば、動力源側にディスク部11を入力部として連結し、駆動輪側に第2回転部材20を出力部として連結した場合、この無段変速機1は、正駆動時に動力源の動力を変速比に応じて変速し、その変速後の動力を駆動輪側に車両の駆動力として伝えることができる。一方、逆駆動時には、動力源がエンジンならばエンジンブレーキを発生させることができ、また、動力源がモータならば電力の回生や回生制動を行うことができる。
このように、この無段変速機1においては、トルクカム13によってトルクの伝達効率を上昇させている。しかしながら、この種の無段変速機1は、入力トルクTinが高いほど大きな押圧力で遊星ボール50を押し付けなければ、その入力トルクTinに応じた摩擦力を発生させることができず、トルクの伝達効率が低下してしまう虞がある。例えば、動力源の出力トルクTpが高いときには、無段変速機1への入力トルクTinも高くなるので、押圧力が不足していると、トルクの伝達効率が低下してしまう可能性がある。これが為、この無段変速機1は、高い入力トルクTinに対応させるべく、そのトルクカム13の軸力Faによる押圧力に加えて、別の押圧力で第1回転部材10又は第2回転部材20の内の少なくとも一方を遊星ボール50に押し付けるようにする。以下、主な押圧力(軸力Fa)を発生させる押圧部(ここではトルクカム13)のことを「主押圧部」と云い、この主押圧部とは別の押圧力を発生させる押圧部のことを「副押圧部」と云う。
副押圧部は、正駆動時に押圧力を発生させるものと、逆駆動時に押圧力を発生させるものとを個別に用意する。以下、正駆動時に押圧力を発生させる副押圧部のことを第1押圧部と云い、逆駆動時に押圧力を発生させる副押圧部のことを第2押圧部と云う。
ところで、遊星ボール50におけるリング部12との接触部分においては、リング部12が回転し始めたときに、その回転方向と同じ向きの接線方向の摩擦力が加わる。そして、その接触部分は、遊星ボール50の外周面上において遊星ボール50の重心からずらした位置にある。これが為、その摩擦力は遊星ボール50において偏心荷重となるので、その摩擦力が加わった際には、その重心を中心にした回転モーメント(以下、「偏心荷重モーメント」という。)が遊星ボール50に発生する。更に、この無段変速機1の動作中においては、図3又は図4に示すように、遊星ボール50におけるリング部12との接触部分と第2回転部材20との接触部分とに逆方向の摩擦力が定常的に発生している。例えば、リング部12を入力側、第2回転部材20を出力側とした正転時の場合、リング部12との接触部分においては、リング部12の回転方向と同じ向きの接線方向の摩擦力となり、第2回転部材20との接触部分においては、第2回転部材20の回転方向とは逆向きの接線方向の摩擦力となる。これが為、遊星ボール50には、その摩擦力の向きの違いによって、重心を中心にした偏心荷重モーメントが発生する。
ここで、無段変速機1においては、遊星ボール50の傾転動作を円滑にする為に、その傾転動作の際に動作させる部材間に隙間を設けている。例えば、この例示においては、上述した支持軸51の夫々の突出端部と第1及び第2の円盤部材52,53の夫々の溝52a,53aとの間に隙間を設けている。これが為、遊星ボール50は、上記の偏心荷重モーメントが発生した場合に、その隙間に応じた量だけ偏心荷重モーメントの方向へと傾いてしまう。つまり、偏心荷重モーメントの方向は上述した第1回転中心軸R1と第2回転中心軸R2とを含む平面に沿うものではないので、その際には、その隙間と偏心荷重モーメントによって、第1回転中心軸R1と第2回転中心軸R2との間の平行状態が崩れてしまい、第2回転中心軸R2が上述した平面内から外れてしまう。従って、サンローラ30と遊星ボール50との間には、スキューが発生する。故に、サンローラ30には、遊星ボール50の偏心荷重モーメントに応じた、換言するならば図3又は図4に示すサンローラ30の速度ベクトルと遊星ボール50の速度ベクトルのずれに応じた軸線方向のスラスト力が遊星ボール50から加わる。その図3に示すスラスト力は、正駆動時のものである。また、図4に示すスラスト力は、逆駆動時のものである。第1及び第2の副押圧部は、そのスラスト力を利用する。
先ず、正駆動時の第1副押圧部について説明する。正駆動時のスラスト力は、図5に示すように、サンローラ30の環状部30aの環状面から軸受部材33に伝わり、その軸受部材33における環状の転動面33aを介して夫々の軸受ボール35に伝達された後、更に各軸受ボール35から軸受部材31の転動面31aにおける側壁面に伝達される。そして、このスラスト力は、軸受部材31からシャフト60に伝わる。従って、この第1副押圧部は、そのシャフト60に加わったスラスト力を第2回転部材20に押圧力として伝えるものにする。具体的に、この第1副押圧部は、図1及び図5に示すように、第2回転部材20の円盤部20aに軸線方向にて対向させたシャフト60の環状部60aと、その円盤部20aと環状部60aとの間に配設した環状のスラスト軸受TB1と、を備える。その環状部60aは、円盤部20aを外側から覆う位置に配置して、円盤部20aの径方向内側部分にスラスト力が伝わるよう外径を設定する。シャフト60に加わったスラスト力は、その環状部60aとスラスト軸受TB1を介して第2回転部材20に押圧力として伝わる。厳密に述べるのであれば、この第1副押圧部は、軸線方向への相対移動が規制されたサンローラ30、軸受部材33、軸受ボール35、軸受部材31、シャフト60(主軸部分及び環状部60a)及びスラスト軸受TB1によって、遊星ボール50からのスラスト力を押圧力として第2回転部材20へと伝えるものとなる。
このように、本実施例の無段変速機1は、正駆動時に主押圧部としてのトルクカム13による押圧力に加えて第1副押圧部によるスラスト力を利用した押圧力も働くので、その2種類の押圧力でリング部12、第2回転部材20及びサンローラ30と夫々の遊星ボール50との間の摩擦力を増加させ、その間におけるトルクの伝達効率を上昇させることができる。これが為、上記の例示の如き車両においては、無段変速機1の正駆動時におけるトルクの伝達効率が更に向上することになるので、動力源を高トルク化しても適切に駆動力を発生させることができる。
次に、逆駆動時の第2副押圧部について説明する。逆駆動時のスラスト力は、図4に示すように、正駆動時のスラスト力とは逆向きになる。このスラスト力は、環状部30aの環状面から軸受部材34に伝わり、その軸受部材34における環状の転動面34aを介して夫々の軸受ボール35に伝達された後、更に各軸受ボール35から軸受部材32の転動面33aにおける側壁面に伝達される。この逆駆動時のスラスト力は、軸受部材32を介してシャフト60に伝わる。従って、この第2副押圧部は、そのシャフト60に加わったスラスト力を第1回転部材10に押圧力として伝えるものにする。具体的に、この第2副押圧部は、図1及び図6に示すように、ディスク部11の円盤部に軸線方向にて対向させたシャフト60の環状部60bと、その円盤部と環状部60bとの間に配設した環状のスラスト軸受TB2と、を備える。その環状部60bは、ディスク部11の円盤部を外側から覆う位置に配置して、その円盤部の径方向内側部分にスラスト力が伝わるよう外径を設定する。シャフト60に加わったスラスト力は、その環状部60bとスラスト軸受TB2を介してディスク部11に押圧力として伝わる。その押圧力は、トルクカム13を介してリング部12に伝わり、夫々の遊星ボール50に働く。厳密に述べるのであれば、この第2副押圧部は、軸線方向への相対移動が規制されたサンローラ30、軸受部材34、軸受ボール35、軸受部材32、シャフト60(主軸部分及び環状部60b)及びスラスト軸受TB2によって、遊星ボール50からのスラスト力を押圧力として第1回転部材10(ディスク部11)へと伝えるものとなる。
このように、本実施例の無段変速機1は、逆駆動時にも正駆動時と同様に、主押圧部としてのトルクカム13による押圧力に加えて第2副押圧部による正駆動時とは逆向きのスラスト力を利用した押圧力も働くので、その2種類の押圧力でリング部12、第2回転部材20及びサンローラ30と夫々の遊星ボール50との間の摩擦力を増加させ、その間におけるトルクの伝達効率を上昇させることができる。これが為、上記の例示の如き車両においては、無段変速機1の逆駆動時におけるトルクの伝達効率が更に向上することになるので、動力源がエンジンならば適度な大きさのエンジンブレーキを発生させることができ、また、動力源がモータならば適量な電力の回生や適度な大きさの回生制動を行うことができるようになる。
ここで、この無段変速機1においては、主押圧部たるトルクカム13と第1副押圧部又は第2副押圧部とで発生させた全押圧力Fが大きすぎると、却ってトルクの伝達効率を低下させてしまう虞がある。これが為、トルクカム13や第1及び第2の副押圧部は、その全押圧力Fが適切な大きさとなるように設定することが望ましい。第1副押圧部や第2副押圧部による押圧力の元となるスラスト力Fbは、トルクカム13の軸力Faとの間に図7に示す線形性を持っており、下記の式3の如く表すことができる。その式3の「a」は、比例係数である。図7は、第1回転部材10を入力側、第2回転部材20を出力側とし、その第1回転部材10(ディスク部11)における入力回転数と変速比(第1回転部材10と第2回転部材20の回転比)を或る一定の大きさに固定したときの状態を示している。
この例示においては、発生したスラスト力Fbが全て押圧力になるものとしているので、トルクカム13と第1副押圧部又は第2副押圧部とによる全押圧力Fは、式2,3を用いて下記の式4の如くなる。
一方、遊星ボール50に作用するトラクション力Ftは、下記の式5で表される。また、遊星ボール50に作用する法線力Fnは、下記の式6で表される。その「nball」は、配設されている遊星ボール50の数である。「rt」は、第1回転中心軸R1からリング部12と遊星ボール50との接触部分までの距離(接触半径)である。また、「b」は、リング部12と遊星ボール50との接触部分における角度等の接触状態によって決まる係数である。
設計トラクション係数μtは、トルク伝達効率の1つの指標であるトラクション係数の目標値のことであり、下記の式7の如くそのトラクション力Ftと法線力Fnとによって導かれる。この設計トラクション係数μtは、その式7のように式4〜6を用いて纏めることができる。尚、ここでは、A=1/bとする。
この無段変速機1においては、その式7を満たすトルクカム13を設定することによって、過不足のない適切な大きさの全押圧力Fをトルクカム13と第1副押圧部又は第2副押圧部とで発生させることができるので、良好なトルクの伝達効率となる。ここで、無段変速機構の構造や大きさによってカム半径rcamは決まってしまうので、トルクカム13は、下記の式8を満たすカム角α1,α2に設定すればよい。ここで、そのカム角α1,α2は、違う角度に設定しても、同じ角度に設定してもよい。
尚、接触半径rtは、第1回転部材10と第2回転部材20の回転比によって変化する。これが為、トルクカム13は、その回転比の範囲内で設計トラクション係数μtを満足させるカム角α1,α2に設定してもよい。また、例えばその回転比に応じた設計トラクション係数μtを設定し、トルクカム13は、その夫々の設計トラクション係数μtを満足させるカム角α1,α2に設定してもよい。
以上示したように、本実施例の無段変速機1は、適度な大きさの押圧力を正駆動時、逆駆動時に拘わらず発生させることができる。また、この無段変速機1においては、その押圧力を発生させる為の機構や構造の大型化を抑えることができる。これが為、この無段変速機1は、車両等への搭載性にも優れたものとなる。
ここで、本実施例においては第1回転部材10側に主押圧部(トルクカム13)を配設したが、この無段変速機1は、第2回転部材20側にも主押圧部を配設してもよい。例えば、その第2回転部材20側の主押圧部としては、第1回転部材10側と同様にトルクカムを用いればよい。この第2回転部材20側においては、第2回転部材20を第1回転部材10と同様にディスク部とリング部に分割し、その間にトルクカム13と同様の構造のトルクカムを配設すればよい。
本実施例においては主押圧部としてトルクカム機構によるものを例示したが、その主押圧部は、液体や気体の圧力を利用して押圧力を発生させる液圧押圧機構や気圧押圧機構であってもよい。その液圧押圧機構や気圧押圧機構は、主押圧部としての押圧力が必要とされるとき(例えば正駆動時や逆駆動時)に、その動作が制御装置によって制御される。ここでは、そのような主押圧部の一例として、油圧を利用した油圧押圧機構について説明する。図8には、無段変速機1においてトルクカム13に替えて油圧押圧機構が適用されたもの(無段変速機2)の一例を示している。その無段変速機2の第1回転部材10については、先に例示した第2回転部材20と同様にディスク部とリング部とが一体化されたものとする。
その油圧押圧機構は、第1回転部材10又は第2回転部材20(この例示では第1回転部材10)を遊星ボール50に向けて押圧可能な環状の押圧部71と、この押圧部71を油圧の変化によって押動する油圧室72と、この油圧室72の油圧を調整する油圧制御装置73と、油圧室72の油圧を設定する演算装置74と、を備える。この油圧押圧機構には、トルクカム13で発生させていた軸力Faを押圧力Faとして発生させる。これが為、この無段変速機2においては、下記の式9に示す全押圧力Fが主押圧部たる油圧押圧機構と第2副押圧部とで発生することになる。
演算装置74は、その式9を満たす押圧力Faの目標値(必要押圧力)Fatgtを演算し、更に、その必要押圧力Fatgtを発生させる油圧室72の目標油圧を求めて設定する。その際、演算装置74は、先ず全押圧力Fの目標値(必要全押圧力)Ftgtを求めた後、この必要全押圧力Ftgtと比例係数(スラスト力係数)aとを用いて下記の式10(式9の変形式)から必要押圧力Fatgtを求める。その比例係数aは、例えば図7に示すようなマップから導き出すことができる。
必要全押圧力Ftgtは、式7を変形した下記の式11に基づいて求めることができる。
例えば動力源81の出力トルクTpが全て第1回転部材10に入力される場合、演算装置74は、その式11の入力トルクTinに出力トルクTpを代入する。また、無段変速機2と動力源81との間にクラッチやトルクコンバータが介在している場合、出力トルクTpがクラッチ等を介して減少することもあるので、演算装置74は、クラッチ等を介した大きさのトルクを式11の入力トルクTinに代入する。これらについては、第2回転部材20が入力部であるときでも同じである。一方、入力部がサンローラ30の場合(キャリア40を周方向へと回転可能な入力部として用いる場合も含む)、出力トルクTpが入力部と第1回転部材10の回転比に応じて変わるので、演算装置74には、その回転比によって変化したトルクを式11の入力トルクTinに代入させてもよい。
更に、トラクション係数は第1回転部材10の回転数(回転速度)に応じて変わるので、設計トラクション係数μtについては、その第1回転部材10の回転数(回転速度)に応じて変化させることが好ましい。ここで、例えば第1回転部材10が入力部となる場合、その第1回転部材10の回転数は、動力源81の回転数Npと比例関係にある。これが為、演算装置74には、設計トラクション係数μtを動力源81の回転数Npに基づきマップ等から求めて設定させればよい。このことは、第2回転部材20が入力部であるときでも同じである。一方、入力部がサンローラ30の場合(キャリア40を周方向へと回転可能な入力部として用いる場合も含む)には、動力源81の回転数Npに加えて、入力部と第1回転部材10の回転比の情報をも用いてマップ等から設計トラクション係数μtを設定させればよい。演算装置74は、その設定した設計トラクション係数μtを式11に代入する。
演算装置74は、油圧室72がそのようにして設定した目標油圧となるように油圧制御装置73を制御し、必要押圧力Fatgtを発生させる。これにより、この無段変速機2においては、その必要押圧力Fatgtとスラスト力Fb(=a*Fatgt)に応じた第1副押圧部又は第2副押圧部による押圧力とが発生する。このように、この無段変速機2においては、動力源81の出力トルクTpや回転数Npに応じた適切な過不足のない全押圧力Fをその都度設定することができる。これが為、この無段変速機2は、動力源81の運転状態に適応させた良好な伝達効率でのトルクの伝達が可能になる。
以上示した無段変速機1,2においてはシャフト60に対して相対回転可能なサンローラ30を備えているが、そのようなサンローラ30が無い無段変速機においても同様の作用効果を奏することができる。そのサンローラ30の無い無段変速機とは、例えば、無段変速機1,2において、シャフト60の外周面上に放射状に遊星ボール50を複数個配設したもの、軸線方向への相対移動ができぬようシャフト60に取り付けた円筒部材の外周面上に放射状に遊星ボール50を複数個配設したものなどである。前者の無段変速機においては、遊星ボール50からシャフト60に直接スラスト力が加わるので、そのスラスト力を利用した押圧力の発生が可能になる。また、後者の無段変速機においては、円筒部材を介してシャフト60に加わることになるので、そのスラスト力を利用した押圧力の発生が可能になる。
更に、以上の説明においては正駆動時(つまり第1回転要素10に正転方向のトルクが入力されて第1回転要素10が正転する場合)や逆駆動時(つまり正転中の第2回転要素20に逆転方向のトルクが入力された場合)を具体例として挙げたが、無段変速機1,2は、第1回転要素10(ディスク部11)に逆転方向のトルクが入力されて第1回転要素10が逆転する場合や第2回転要素20に正転方向のトルクが入力されて第2回転要素20が正転する場合にも利用可能である。この場合、無段変速機1においては、主押圧部たるトルクカム13で軸力Faを発生させることができない。また、無段変速機2においては、例えば、主押圧部たる液圧押圧機構や気圧押圧機構の液圧や気圧の低下によって、その主押圧部で適度な大きさの押圧力を発生させることができない可能性もある。この無段変速機1,2においては、そのような形態に代表される主押圧部が作動不能(軸力Faを発生不可能)なとき又は作動不良のときに、リング部12、第2回転部材20及びサンローラ30と夫々の遊星ボール50との間の摩擦力が増加せず、その間におけるトルクの伝達効率を上昇させることができない可能性がある。しかしながら、主押圧部がそのような状態であっても、この無段変速機1,2においては、遊星ボール50に偏心荷重モーメントが発生し、そのモーメント方向に応じたスラスト力がサンローラ30に加わる。従って、この無段変速機1,2は、主押圧部が作動不能な状態等になっていても、スラスト力を利用した押圧力によってトルクの伝達効率を上げることができる。
具体的に、第1回転要素10(ディスク部11)に逆転方向のトルクが入力されて第1回転要素10が逆転する場合、サンローラ30には、図4に示すスラスト力が加わる。これが為、この場合には、第2副押圧部の作用によってシャフト60の環状部60bから第1回転要素10に押圧力を加えることができる。一方、第2回転要素20に正転方向のトルクが入力されて第2回転要素20が正転する場合、サンローラ30には、図3に示すスラスト力が加わる。これが為、この場合には、第1副押圧部の作用によってシャフト60の環状部60aから第2回転要素20に押圧力を加えることができる。
このように、この無段変速機1,2は、主押圧部で押圧力を全く又は適度な大きさで発生させることができない状態においても、スラスト力を利用した第1副押圧部又は第2押圧部によって押圧力の発生が可能になる。従って、この無段変速機1,2においては、そのような状態であっても、リング部12、第2回転部材20及びサンローラ30と夫々の遊星ボール50との間の摩擦力の増加が可能になり、その間におけるトルクの伝達効率を上昇させることができる。
以上示したように、本実施例の無段変速機1,2は、各回転要素の回転方向に拘わらず、適度な大きさの押圧力を発生させ、トルクの伝達効率を向上させることができる。
尚、無段変速機1,2においては何れにも主押圧部を設けているが、例えば小さい入力トルクしか入力されない場合には、第1副押圧部と第2副押圧部のみで押圧力を発生させるように無段変速機を構築してもよい。
以上のように、本発明に係る無段変速機は、正駆動、逆駆動に拘わらず十分な動力伝達効率を確保する為の技術に有用である。
1,2 無段変速機
10 第1回転部材(第1回転要素)
11 ディスク部
12 リング部
13 トルクカム(主押圧部)
20 第2回転部材(第2回転要素)
20a 円盤部
30 サンローラ(第3回転要素)
30a 環状部
31,32,33,34 軸受部材
31a,32a,33a,34a 転動面
35 軸受ボール
40 キャリア(第4回転要素)
50 遊星ボール(転動部材、第5回転要素)
51 支持軸
52,53 円盤部材
52a,53a 溝
60 シャフト
60a,60b 環状部
71 押圧部
72 油圧室
73 油圧制御装置
74 演算装置
R1 第1回転中心軸
R2 第2回転中心軸
TB1,TB2 スラスト軸受
10 第1回転部材(第1回転要素)
11 ディスク部
12 リング部
13 トルクカム(主押圧部)
20 第2回転部材(第2回転要素)
20a 円盤部
30 サンローラ(第3回転要素)
30a 環状部
31,32,33,34 軸受部材
31a,32a,33a,34a 転動面
35 軸受ボール
40 キャリア(第4回転要素)
50 遊星ボール(転動部材、第5回転要素)
51 支持軸
52,53 円盤部材
52a,53a 溝
60 シャフト
60a,60b 環状部
71 押圧部
72 油圧室
73 油圧制御装置
74 演算装置
R1 第1回転中心軸
R2 第2回転中心軸
TB1,TB2 スラスト軸受
Claims (6)
- 対向させて相対回転可能に配置した共通の第1回転中心軸を有する第1及び第2の回転要素と、
前記第1回転中心軸とは別の第2回転中心軸を有し、前記第1回転要素と前記第2回転要素とで挟持されて当該第1及び第2の回転要素との間におけるトルク伝達を可能にする転動部材と、
前記転動部材を傾転させることで前記第1及び第2の回転要素の間の回転比を変化させる変速制御部と、
前記第1又は第2の回転要素の内の少なくとも一方に対して前記転動部材に向けた押圧力を発生させる主押圧部と、
回転中の前記第1又は第2の回転要素の内の一方に対して当該回転方向とは逆向きのトルクが入力される逆駆動のときに前記転動部材から加えられたスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の一方に伝える副押圧部と、
を備えることを特徴とした無段変速機。 - 前記第1又は第2の回転要素の内の一方を入力トルクと同じ向きに回転させる正駆動のときに前記転動部材から加えられた前記逆駆動時とは逆向きのスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の一方に伝える別の副押圧部を更に設けることを特徴とした請求項1記載の無段変速機。
- 前記主押圧部による押圧力と前記副押圧部による押圧力との合計が設計トラクション係数に応じた大きさとなるように当該主押圧部を設定することを特徴とした請求項1又は2に記載の無段変速機。
- 前記主押圧部は、発生させる押圧力の大きさの制御が可能なものであり、
前記主押圧部による押圧力と前記副押圧部による押圧力との合計が設計トラクション係数に応じた大きさとなるように当該主押圧部による押圧力を制御することを特徴とした請求項1又は2に記載の無段変速機。 - 対向させて相対回転可能に配置した共通の第1回転中心軸を有する第1及び第2の回転要素と、
前記第1回転中心軸とは別の第2回転中心軸を有し、前記第1回転要素と前記第2回転要素とで挟持されて当該第1及び第2の回転要素との間におけるトルク伝達を可能にする転動部材と、
前記転動部材を傾転させることで前記第1及び第2の回転要素の間の回転比を変化させる変速制御部と、
前記第1又は第2の回転要素の内の一方を入力トルクと同じ向きに回転させる正駆動のときに前記転動部材から加えられたスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の一方に伝える第1副押圧部と、
前記正駆動時の前記第1又は第2の回転要素の内の他方に対して当該回転方向とは逆向きのトルクが入力される逆駆動のときに前記転動部材から加えられた前記正駆動時とは逆向きのスラスト力を当該転動部材に対する押圧力として前記第1又は第2の回転要素の内の前記正駆動時とは異なる方に伝える第2副押圧部と、
を備えることを特徴とした無段変速機。 - 前記第1回転中心軸を有すると共に当該第1回転中心軸を中心に放射状に複数個配置した前記転動部材の転動面となる外周面を有し、前記第1及び第2の回転要素に対する相対回転が可能な第3回転要素と、
前記第1回転中心軸を有し、前記第1から第3の回転要素に対する相対回転が可能で且つ前記第1回転中心軸を中心にして前記各転動部材を回転させることが可能な第4回転要素と、
を設け、
前記第1から第4の回転要素の内の何れか1つを前記第1回転中心軸を中心にして回転させぬようにすることを特徴とした請求項1から5の内の何れか1つに記載の無段変速機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010058135A JP2011190881A (ja) | 2010-03-15 | 2010-03-15 | 無段変速機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010058135A JP2011190881A (ja) | 2010-03-15 | 2010-03-15 | 無段変速機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011190881A true JP2011190881A (ja) | 2011-09-29 |
Family
ID=44796016
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010058135A Withdrawn JP2011190881A (ja) | 2010-03-15 | 2010-03-15 | 無段変速機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011190881A (ja) |
-
2010
- 2010-03-15 JP JP2010058135A patent/JP2011190881A/ja not_active Withdrawn
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5131353B2 (ja) | 無段変速機 | |
| US8382636B2 (en) | Continuously variable transmission | |
| US20150038285A1 (en) | Continuously variable transmission | |
| JP5842921B2 (ja) | 無段変速機 | |
| JP2011190882A (ja) | 無段変速機 | |
| JP2011153645A (ja) | 無段変速機及び無段変速機の制御装置 | |
| JP5601420B2 (ja) | 無段変速機 | |
| JP2011190881A (ja) | 無段変速機 | |
| JP6119372B2 (ja) | ローディングカム装置及び摩擦ローラ式減速機 | |
| CN111279099B (zh) | 无级变速器以及自行车 | |
| JP2014214838A (ja) | 無段変速機 | |
| JP7422939B2 (ja) | 変速機 | |
| JP2014040892A (ja) | 摩擦ローラ式変速機 | |
| JP2011153649A (ja) | 駆動制御装置 | |
| JP2007255699A (ja) | 遊星ローラ変速装置および動力伝達変換機構 | |
| JP5488492B2 (ja) | 無段変速機 | |
| JP2009047218A (ja) | 無段変速装置 | |
| JP2012122567A (ja) | 無段変速機 | |
| JP2011202701A (ja) | 無段変速機 | |
| JP2012127457A (ja) | 無段変速機 | |
| JP5761445B2 (ja) | 無段変速機 | |
| JP4871244B2 (ja) | 摩擦型遊星動力伝達機構 | |
| JP5862335B2 (ja) | トロイダル型無段変速機 | |
| JP2014040886A (ja) | 摩擦ローラ式変速機 | |
| JP2003227553A (ja) | トロイダル型無段変速機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20130604 |