JP2011226257A - 建設機械用安全装置 - Google Patents
建設機械用安全装置 Download PDFInfo
- Publication number
- JP2011226257A JP2011226257A JP2011085433A JP2011085433A JP2011226257A JP 2011226257 A JP2011226257 A JP 2011226257A JP 2011085433 A JP2011085433 A JP 2011085433A JP 2011085433 A JP2011085433 A JP 2011085433A JP 2011226257 A JP2011226257 A JP 2011226257A
- Authority
- JP
- Japan
- Prior art keywords
- safety device
- drive unit
- construction machine
- movable range
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000010276 construction Methods 0.000 title claims abstract description 53
- 238000001514 detection method Methods 0.000 claims abstract description 19
- 238000011156 evaluation Methods 0.000 claims abstract description 18
- 239000003086 colorant Substances 0.000 claims description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images

Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
- E21B7/024—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting having means for adapting to inclined terrain; having means for stabilizing the vehicle while drilling
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B41/00—Equipment or details not covered by groups E21B15/00 - E21B40/00
- E21B41/0021—Safety devices, e.g. for preventing small objects from falling into the borehole
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
- E21B7/022—Control of the drilling operation; Hydraulic or pneumatic means for activation or operation
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Environmental & Geological Engineering (AREA)
- Fluid Mechanics (AREA)
- Physics & Mathematics (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Component Parts Of Construction Machinery (AREA)
- Earth Drilling (AREA)
- Emergency Lowering Means (AREA)
Abstract
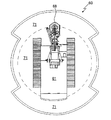
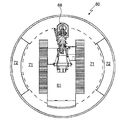
【解決手段】キャリアユニット10に対する駆動ユニット18の現在位置を1個又は複数個の検出手段28,29で検出する。建設機械1の傾きに対し所与レベルの安全性を提供しつつ駆動ユニット18を動かせる可動範囲を、1個又は複数個の入力値に基づき、評価ユニット22が1個又は複数個定める。表示手段20が、キャリアユニット10に対する駆動ユニット18の現在位置と併せ、その可動範囲を表示する。
【選択図】図1
Description
Claims (12)
- キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置であって、
キャリアユニットに対する駆動ユニットの現在位置を検出する1個又は複数個の検出手段と、
キャリアユニットに対する駆動ユニットの現在位置を表示する表示手段と、
建設機械の傾きに対し所与レベルの安全性を提供しつつ駆動ユニットを動かせる可動範囲を1個又は複数個の入力値に基づき1個又は複数個定める評価ユニットと、
を備え、駆動ユニットの現在位置と併せその可動範囲を表示手段で表示させる安全装置。 - 請求項1記載の安全装置であって、駆動ユニットがキャリアユニットに対し鉛直軸周りで可枢動な建設機械で使用される安全装置において、
1個又は複数個の検出手段が、キャリアユニットに対する駆動ユニットの鉛直軸周りでの枢動方向現在位置を検出し、
駆動ユニットの枢動方向現在位置と併せその可動範囲を表示手段で表示させる安全装置。 - 請求項2記載の安全装置であって、駆動ユニットが鉛直軸に対し径方向に可動な建設機械で使用される安全装置において、
1個又は複数個の検出手段が、鉛直軸に対する駆動ユニットの径方向現在位置を検出し、
駆動ユニットの径方向現在位置と併せその可動範囲を表示手段で表示させる安全装置。 - 請求項1記載の安全装置であって、キャリアユニットが走行装置、駆動ユニットがドリルツール等の基礎構築ツールを1個又は複数個有する建設機械で使用される安全装置。
- 請求項1記載の安全装置であって、上記現在位置と併せ上記可動範囲を、表示手段で同じスケッチマップ上に表示させる安全装置。
- 請求項1記載の安全装置であって、駆動ユニットの位置が変化しているときに、表示手段で上記可動範囲を固定表示させる安全装置。
- 請求項1記載の安全装置であって、建設機械又はその一部の平面的な模式像と併せ、上記可動範囲を表示手段で表示させる安全装置。
- 請求項1記載の安全装置であって、表示手段で上記可動範囲を有色ハイライト表示させる安全装置。
- 請求項1記載の安全装置であって、
評価ユニットが、稼働制限のない第1可動範囲及び建設機械稼働制限がある第2可動範囲を定め、
それらの可動範囲を、互いに色を違え且つ上記現在位置と併せ、表示手段で互いに同じスケッチマップ上に表示する安全装置。 - 請求項1記載の安全装置であって、評価ユニットが、オペレータにより初期設定される建設機械稼働パラメタを参照して上記可動範囲を定める安全装置。
- 請求項1記載の安全装置であって、評価ユニットに対する入力値が、建設機械に備わる検出手段によって検出された値、マニュアル入力された値、データベースから得られた値又はその任意の組合せである安全装置。
- 請求項1記載の安全装置を備える建設機械。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10004085.6 | 2010-04-16 | ||
| EP10004085.6A EP2378054B1 (de) | 2010-04-16 | 2010-04-16 | Baumaschine mit einer Sicherheitseinrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011226257A true JP2011226257A (ja) | 2011-11-10 |
| JP5564462B2 JP5564462B2 (ja) | 2014-07-30 |
Family
ID=42710507
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011085433A Expired - Fee Related JP5564462B2 (ja) | 2010-04-16 | 2011-04-07 | 建設機械用安全装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8624752B2 (ja) |
| EP (1) | EP2378054B1 (ja) |
| JP (1) | JP5564462B2 (ja) |
| CN (1) | CN102220862B (ja) |
| BR (1) | BRPI1101739A2 (ja) |
| RU (1) | RU2466241C1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025529456A (ja) * | 2022-10-06 | 2025-09-04 | バウアー マシーネン ゲーエムベーハー | 土木機械及び土木機械運転方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2672057B1 (en) | 2012-06-07 | 2017-08-16 | Sandvik Mining and Construction Oy | Dynamic working area |
| DE102015003177A1 (de) | 2015-03-12 | 2016-09-15 | Liebherr-Werk Nenzing Gmbh | Verfahren zum Betrieb einer mobilen Arbeitsmaschine mit Bodendruckbegrenzung |
| DE102015215666A1 (de) * | 2015-08-18 | 2017-02-23 | Robert Bosch Gmbh | Werkerführung direkt auf Anzeige Display des Werkzeugs |
| EP3553229B1 (de) | 2018-04-11 | 2024-05-29 | BAUER Spezialtiefbau GmbH | Tiefbauvorrichtung und system zum überwachen einer baustelle |
| EP3722512B1 (de) * | 2019-04-08 | 2022-06-08 | BAUER Maschinen GmbH | Tiefbaugerät und verfahren zum betreiben des tiefbaugeräts |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1990007465A1 (fr) * | 1988-12-27 | 1990-07-12 | Kato Works Co., Ltd. | Dispositif de securite pour grues |
| JPH08326459A (ja) * | 1995-05-30 | 1996-12-10 | Aichi Corp | 穴掘建柱車の安全装置 |
| JPH10273921A (ja) * | 1997-01-31 | 1998-10-13 | Komatsu Ltd | 建設機械の転倒防止装置 |
| JP2004308185A (ja) * | 2003-04-04 | 2004-11-04 | Mitsui Miike Mach Co Ltd | 縦穴掘削装置 |
| JP2010001613A (ja) * | 2008-06-18 | 2010-01-07 | Hitachi Constr Mach Co Ltd | 解体作業機の安全監視装置 |
| JP2010138657A (ja) * | 2008-12-15 | 2010-06-24 | Caterpillar Japan Ltd | 解体作業機 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI801541A7 (fi) * | 1979-05-18 | 1980-11-19 | Coles Cranes Ltd | Saekerhetsindikator foer last |
| US4511974A (en) * | 1981-02-04 | 1985-04-16 | Kabushiki Kaisha Toyoda Jidoshokki Seisakusho | Load condition indicating method and apparatus for forklift truck |
| SU1159991A1 (ru) | 1984-12-28 | 1985-06-07 | Киевский институт автоматики им.ХХУ съезда КПСС | Устройство дл автоматизированного контрол силового режима металлоконструкций оборудовани роторных комплексов |
| US5730305A (en) | 1988-12-27 | 1998-03-24 | Kato Works Co., Ltd. | Crane safety apparatus |
| DE8912027U1 (de) | 1989-10-10 | 1989-11-23 | Wirth Maschinen- Und Bohrgeraete-Fabrik Gmbh, 5140 Erkelenz | Bohrgerät |
| US6894621B2 (en) * | 1997-02-27 | 2005-05-17 | Jack B. Shaw | Crane safety devices and methods |
| JP2000034093A (ja) | 1998-07-21 | 2000-02-02 | Kobe Steel Ltd | 旋回式作業機械とその安全作業領域及び定格荷重の設定方法 |
| US6272413B1 (en) * | 1999-03-19 | 2001-08-07 | Kabushiki Kaisha Aichi Corporation | Safety system for boom-equipped vehicle |
| DE20011371U1 (de) | 2000-06-28 | 2000-09-14 | Bauer Spezialtiefbau Gmbh, 86529 Schrobenhausen | Bauarbeitsgerät |
| US6343799B1 (en) * | 2000-08-01 | 2002-02-05 | Caterpillar Inc. | Tilt mechanism for work machine |
| US6637523B2 (en) * | 2000-09-22 | 2003-10-28 | The University Of Hong Kong | Drilling process monitor |
| US6985795B2 (en) * | 2001-09-21 | 2006-01-10 | Schlage Lock Company | Material handler with center of gravity monitoring system |
| RU2245294C2 (ru) | 2003-04-09 | 2005-01-27 | Мамаев Камиль Мамаевич | Способ моментной защиты стрелового крана по сигналам датчиков опор и устройство для его реализации |
| RU2267458C1 (ru) | 2004-04-28 | 2006-01-10 | Тульский государственный университет | Система контроля грузовой устойчивости мобильных грузоподъемных машин |
| CN100357530C (zh) * | 2005-05-25 | 2007-12-26 | 石午江 | 多功能电动旋挖钻机 |
| US7325634B2 (en) | 2005-06-23 | 2008-02-05 | Atlas Copco Drilling Solutions | Track-mounted drilling machine with active suspension system |
| US7734397B2 (en) * | 2005-12-28 | 2010-06-08 | Wildcat Technologies, Llc | Method and system for tracking the positioning and limiting the movement of mobile machinery and its appendages |
| ATE396306T1 (de) * | 2006-03-01 | 2008-06-15 | Bauer Maschinen Gmbh | Bauarbeitsvorrichtung und verfahren zur bereitstellung eines transportzustands für eine bauarbeitsvorrichtung |
| KR100934947B1 (ko) * | 2007-10-02 | 2010-01-06 | 볼보 컨스트럭션 이키프먼트 홀딩 스웨덴 에이비 | 레벨링 수단이 구비된 중장비의 영상표시 시스템 |
| DE102007057462A1 (de) * | 2007-11-29 | 2009-06-10 | Bayer Materialscience Ag | Verfahren zur Herstellung von Phosgen mit reduzierter CO-Emission |
-
2010
- 2010-04-16 EP EP10004085.6A patent/EP2378054B1/de not_active Revoked
-
2011
- 2011-03-25 US US13/072,460 patent/US8624752B2/en active Active
- 2011-03-28 RU RU2011111328/03A patent/RU2466241C1/ru active
- 2011-04-07 JP JP2011085433A patent/JP5564462B2/ja not_active Expired - Fee Related
- 2011-04-15 BR BRPI1101739-2A patent/BRPI1101739A2/pt not_active IP Right Cessation
- 2011-04-15 CN CN201110095046.2A patent/CN102220862B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1990007465A1 (fr) * | 1988-12-27 | 1990-07-12 | Kato Works Co., Ltd. | Dispositif de securite pour grues |
| JPH08326459A (ja) * | 1995-05-30 | 1996-12-10 | Aichi Corp | 穴掘建柱車の安全装置 |
| JPH10273921A (ja) * | 1997-01-31 | 1998-10-13 | Komatsu Ltd | 建設機械の転倒防止装置 |
| JP2004308185A (ja) * | 2003-04-04 | 2004-11-04 | Mitsui Miike Mach Co Ltd | 縦穴掘削装置 |
| JP2010001613A (ja) * | 2008-06-18 | 2010-01-07 | Hitachi Constr Mach Co Ltd | 解体作業機の安全監視装置 |
| JP2010138657A (ja) * | 2008-12-15 | 2010-06-24 | Caterpillar Japan Ltd | 解体作業機 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025529456A (ja) * | 2022-10-06 | 2025-09-04 | バウアー マシーネン ゲーエムベーハー | 土木機械及び土木機械運転方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2378054A1 (de) | 2011-10-19 |
| RU2466241C1 (ru) | 2012-11-10 |
| JP5564462B2 (ja) | 2014-07-30 |
| US8624752B2 (en) | 2014-01-07 |
| EP2378054B1 (de) | 2019-08-28 |
| BRPI1101739A2 (pt) | 2013-01-15 |
| US20110254694A1 (en) | 2011-10-20 |
| CN102220862A (zh) | 2011-10-19 |
| CN102220862B (zh) | 2015-05-20 |
| RU2011111328A (ru) | 2012-10-10 |
| HK1162632A1 (en) | 2012-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5564462B2 (ja) | 建設機械用安全装置 | |
| JP5395109B2 (ja) | 調節範囲を決定するコンピュータユニットを有する建設機械及びその建設機械を動作させる方法 | |
| CN102718147B (zh) | 吊钩运动控制系统和塔式起重机 | |
| CN106715317B (zh) | 操作移动式起重机的方法与装置以及移动式起重机 | |
| JP5464782B2 (ja) | クレーン | |
| JP6161776B1 (ja) | クレーン作業補助装置 | |
| CN106185627A (zh) | 吊钩偏角监测装置、垂直吊装监控装置及移动式起重机 | |
| JP2014091632A (ja) | アウトリガパッド監視装置 | |
| EP3722248B1 (en) | Lifting/lowering device | |
| JP2009137763A (ja) | 建設機械の安定性を監視するための装置および方法 | |
| JP6161156B2 (ja) | 転角試験装置 | |
| CN103130098B (zh) | 一种吊钩偏角万向水平仪监测装置及起重机 | |
| JP2018142123A (ja) | 遠隔操縦システム | |
| JP2012111570A (ja) | 吊荷旋回装置 | |
| JP6113342B1 (ja) | 天井クレーンにおける吊り上げ位置調整装置 | |
| JP5375295B2 (ja) | クローラクレーンのカウンタウエイト構造 | |
| CN105939766B (zh) | 搅拌消泡装置 | |
| JP4015158B2 (ja) | クレーン吊荷操作表示装置 | |
| KR20150047678A (ko) | 레이더 마스트의 진동저감 장치 | |
| JP2017194381A (ja) | 建設機械の傾斜検出装置 | |
| JP3795480B2 (ja) | リフティングジャッキ昇降システム | |
| KR20200127724A (ko) | 경동 장치 및 경동 방법 | |
| JP7607409B2 (ja) | クレーンの表示装置 | |
| JP7362427B2 (ja) | 建設機械の荷重計測装置 | |
| JP2009068262A (ja) | 杭打機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121113 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130208 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130214 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131022 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140527 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140616 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5564462 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |