JP2011237333A - 衛星測位受信機 - Google Patents
衛星測位受信機 Download PDFInfo
- Publication number
- JP2011237333A JP2011237333A JP2010110332A JP2010110332A JP2011237333A JP 2011237333 A JP2011237333 A JP 2011237333A JP 2010110332 A JP2010110332 A JP 2010110332A JP 2010110332 A JP2010110332 A JP 2010110332A JP 2011237333 A JP2011237333 A JP 2011237333A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- code
- time
- satellite
- propagation time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
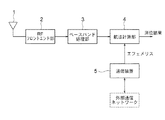
【解決手段】SPS用受信アンテナで受信されたRF信号にフロントエンド処理を行うフロントエンド手段と、フロントエンド処理により得られたデジタル信号に対して信号捕捉および追尾処理を行って信号伝播時間を得るベースバンド処理手段と、当該信号伝播時間に基づき疑似距離計算および測位計算を行う航法計算手段とを備え、ベースバンド処理手段が、複数の衛星のうち、一番最初に航法データをデコードして信号が送信されたSPSシステム時刻を得た基準衛星については、従来手法どおりにそのシステム時刻を使って信号伝播時間を算出し、それ以外の衛星については、その衛星と基準衛星とのコード位相差を求め、コード位相差から信号伝播時間を算出する。
【選択図】図6
Description
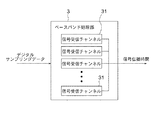
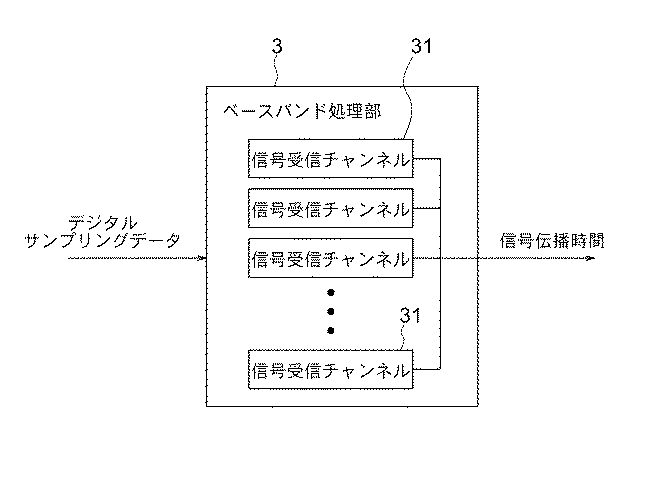
この発明の実施の形態1に係るベースバンド処理部3における動作の流れを図6に示す。図6の処理において、ステップS1〜S14までの処理は、図5と基本的に同じである。図6と図5との違いは、図6においては、図5のステップS15の信号伝播時間計算を行わずに、ステップS20の信号伝播時間計算を代わりに行う。図5のステップS15においては、自らの信号受信チャンネル31で取得した時刻を使って信号伝播時間を計算していたが、図6のステップS20においては、当該時刻は使わずに、基準衛星の信号受信チャンネル31から、基準衛星のコード位相と信号伝播時間とを取得して、他の衛星からのデジタルサンプリングデータの信号伝播時間を計算する。なお、ここで、基準衛星とは、受信したい複数の衛星の中で、測位信号を捕捉して航法メッセージからその信号の送信時刻が一番最初に取得できた衛星のことを基準衛星と呼ぶこととする。
本実施の形態は、基本的には実施の形態1と変わらないが、信号捕捉時にTiered Codeを使うとTiered Codeのコード長は長いため、コード位相の探索に時間がかかってしまう。そこで、本実施の形態においては、GALILEOの場合には、信号捕捉時にPrimary Codeを用い、信号捕捉が完了したら、その時点からTiered Codeに移行する手法を用いる。例えば、Primary Codeが4[msec]の長さを持ち、Secondary Codeが25ビットの場合、Primary Codeによる信号捕捉後、25種類のコードタイミングを検査すればTiered Codeのコード位相を得ることができる。信号捕捉においてTiered Codeに移行後の処理は実施の形態1と全く同じである。
本実施の形態も、実施の形態1と基本的に変わらないが、Tiered Codeによって基準衛星とのコード位相差が判明した後は、Tiered Codeを使い続ける必要はないため、本実施の形態においては、基準衛星とのコード位相差が判明した後はPrimary Codeによるコード追尾処理に移行する。このようなことができるのは、Tiered Codeによる測位において式(2)によって信号伝播時間Δtkが計算できている時には、いわゆるコードアンビギュイティが解けている状態であるから、Primary Codeによるコード位相に対してもコードアンビギュイティを決定することができ、信号伝播時間Δtkを算出できるからである。このことは、次式を使って説明される。
Claims (4)
- 複数の衛星からRF信号を受信するSPS用受信アンテナと、
受信された上記RF信号に対して、増幅処理、フィルタ処理、および、A/D変換処理を含むフロントエンド処理を行うフロントエンド手段と、
上記フロントエンド処理により得られたデジタル信号に対して、信号捕捉および追尾処理を行って、信号伝播時間を得るベースバンド処理手段と、
上記信号伝播時間に基づき、疑似距離計算および測位計算を行う航法計算手段と
を備え、
上記ベースバンド処理手段は、
上記複数の衛星のうち、一番最初に航法データより信号が送信されたSPSシステム時刻を得た基準衛星については、当該SPSシステム時刻を使って信号伝播時間を算出し、
それ以外の衛星については、その衛星と上記基準衛星とのコード位相差を求め、上記コード位相差から信号伝播時間を算出する
ことを特徴とする衛星測位受信機。 - 上記ベースバンド処理手段は、コードアンビギュイティを決定することで、上記基準衛星の追尾の途絶が起きた場合に、それ以外の衛星の観測値を利用して新規に追尾を開始した衛星の信号伝播時間の算出を速やかに開始できる
ことを特徴とする請求項1に記載の衛星測位受信機。 - 上記ベースバンド処理手段は、信号捕捉時にはPrimary Codeを用い、信号捕捉完了後はTiered Codeを用いることを特徴とする請求項1または2に記載の衛星測位受信機。
- 上記ベースバンド処理手段は、Tiered Codeを用いて、上記基準衛星とのコード位相差を求め、それ以降は、Primary Codeを用いて、信号伝播時間の計算を行うことを特徴とする請求項1ないし3のいずれか1項に記載の衛星測位受信機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110332A JP5650436B2 (ja) | 2010-05-12 | 2010-05-12 | 衛星測位受信機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110332A JP5650436B2 (ja) | 2010-05-12 | 2010-05-12 | 衛星測位受信機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011237333A true JP2011237333A (ja) | 2011-11-24 |
| JP5650436B2 JP5650436B2 (ja) | 2015-01-07 |
Family
ID=45325474
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010110332A Expired - Fee Related JP5650436B2 (ja) | 2010-05-12 | 2010-05-12 | 衛星測位受信機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5650436B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102571136A (zh) * | 2012-01-29 | 2012-07-11 | 北京航空航天大学 | 一种双路伪码捕获系统的相关峰检测方法 |
| CN102594393A (zh) * | 2012-01-29 | 2012-07-18 | 北京航空航天大学 | 一种卫星综合基带设备的通用伪码同步系统 |
| JP2014048288A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| JP2014048289A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| JP2014048286A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| JP2014048287A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| CN103926594A (zh) * | 2014-04-30 | 2014-07-16 | 深圳市星耀航威通讯技术有限公司 | 卫星定位接收机 |
| TWI449941B (zh) * | 2012-12-27 | 2014-08-21 | Acer Inc | 定位系統和定位方法 |
| TWI451115B (zh) * | 2012-12-05 | 2014-09-01 | Inst Information Industry | 衛星定位方法、衛星虛擬距離計算裝置及其衛星虛擬距離計算方法 |
| WO2015099194A1 (ja) | 2013-12-27 | 2015-07-02 | 日本電気株式会社 | 衛星測位システム、測位端末、測位方法、及び記録媒体 |
| CN112731485A (zh) * | 2020-12-23 | 2021-04-30 | 大唐半导体设计有限公司 | 一种卫星导航定位接收机及提高接收机定位精度的方法 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9019A (en) * | 1852-06-15 | Charles fleischbl | ||
| JPH05150031A (ja) * | 1991-11-29 | 1993-06-18 | Sony Corp | Gps受信機 |
| JPH07280912A (ja) * | 1994-04-08 | 1995-10-27 | Matsushita Electric Ind Co Ltd | Gps受信機 |
| JP2007124291A (ja) * | 2005-10-28 | 2007-05-17 | Matsushita Electric Ind Co Ltd | 測位装置およびその制御方法 |
| JP2008128791A (ja) * | 2006-11-20 | 2008-06-05 | Denso Corp | 周波数変換回路及び衛星測位信号受信装置 |
| JP2008547338A (ja) * | 2005-07-01 | 2008-12-25 | ヨーロピアン スペース エージェンシー | 衛星ナビゲーション・システムのための拡散符号 |
| JP2010002372A (ja) * | 2008-06-23 | 2010-01-07 | Furuno Electric Co Ltd | 多周波gnss受信装置 |
| JP2010091461A (ja) * | 2008-10-09 | 2010-04-22 | Seiko Epson Corp | 衛星信号受信装置、計時装置及び衛星信号受信方法 |
-
2010
- 2010-05-12 JP JP2010110332A patent/JP5650436B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9019A (en) * | 1852-06-15 | Charles fleischbl | ||
| JPH05150031A (ja) * | 1991-11-29 | 1993-06-18 | Sony Corp | Gps受信機 |
| JPH07280912A (ja) * | 1994-04-08 | 1995-10-27 | Matsushita Electric Ind Co Ltd | Gps受信機 |
| JP2008547338A (ja) * | 2005-07-01 | 2008-12-25 | ヨーロピアン スペース エージェンシー | 衛星ナビゲーション・システムのための拡散符号 |
| JP2007124291A (ja) * | 2005-10-28 | 2007-05-17 | Matsushita Electric Ind Co Ltd | 測位装置およびその制御方法 |
| JP2008128791A (ja) * | 2006-11-20 | 2008-06-05 | Denso Corp | 周波数変換回路及び衛星測位信号受信装置 |
| JP2010002372A (ja) * | 2008-06-23 | 2010-01-07 | Furuno Electric Co Ltd | 多周波gnss受信装置 |
| JP2010091461A (ja) * | 2008-10-09 | 2010-04-22 | Seiko Epson Corp | 衛星信号受信装置、計時装置及び衛星信号受信方法 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102571136A (zh) * | 2012-01-29 | 2012-07-11 | 北京航空航天大学 | 一种双路伪码捕获系统的相关峰检测方法 |
| CN102594393A (zh) * | 2012-01-29 | 2012-07-18 | 北京航空航天大学 | 一种卫星综合基带设备的通用伪码同步系统 |
| CN102594393B (zh) * | 2012-01-29 | 2013-12-25 | 北京航空航天大学 | 一种卫星综合基带设备的通用伪码同步系统 |
| CN102571136B (zh) * | 2012-01-29 | 2014-01-22 | 北京航空航天大学 | 一种双路伪码捕获系统的相关峰检测方法 |
| JP2014048288A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| JP2014048289A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| JP2014048286A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| JP2014048287A (ja) * | 2012-08-31 | 2014-03-17 | O2 Micro Inc | ナビゲーションデータを同期させる方法及び装置 |
| TWI451115B (zh) * | 2012-12-05 | 2014-09-01 | Inst Information Industry | 衛星定位方法、衛星虛擬距離計算裝置及其衛星虛擬距離計算方法 |
| US9244154B2 (en) | 2012-12-27 | 2016-01-26 | Acer Incorporated | System and method for positioning device under test |
| TWI449941B (zh) * | 2012-12-27 | 2014-08-21 | Acer Inc | 定位系統和定位方法 |
| JP2015125119A (ja) * | 2013-12-27 | 2015-07-06 | 日本電気株式会社 | 衛星測位システム、測位端末、測位方法、及びプログラム |
| WO2015099194A1 (ja) | 2013-12-27 | 2015-07-02 | 日本電気株式会社 | 衛星測位システム、測位端末、測位方法、及び記録媒体 |
| CN105849589A (zh) * | 2013-12-27 | 2016-08-10 | 日本电气株式会社 | 全球导航卫星系统、定位终端、定位方法以及记录介质 |
| US10564295B2 (en) | 2013-12-27 | 2020-02-18 | Nec Corporation | Global navigation satellite system, positioning terminal, positioning method, and recording medium |
| CN103926594A (zh) * | 2014-04-30 | 2014-07-16 | 深圳市星耀航威通讯技术有限公司 | 卫星定位接收机 |
| CN112731485A (zh) * | 2020-12-23 | 2021-04-30 | 大唐半导体设计有限公司 | 一种卫星导航定位接收机及提高接收机定位精度的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5650436B2 (ja) | 2015-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5650436B2 (ja) | 衛星測位受信機 | |
| US11650327B2 (en) | Antenna phase center compensation for orbital assistance data | |
| RU2438146C2 (ru) | Система и/или способ для уменьшения неоднозначностей в принимаемых сигналах спутниковой системы определения местоположения (sps) | |
| CN102047136B (zh) | 利用卫星系统的因特网热点定位 | |
| JP5730483B2 (ja) | Gnss信号の捕捉のための方法、製品、加入者装置、及びシステム | |
| US20080111737A1 (en) | Method and system for hybrid location aiding for multi-mode devices | |
| EP2202532B1 (en) | Supporting a relative positioning | |
| US20110018762A1 (en) | Method and system for calibrating a local gnss clock using non-gnss system clocks in a gnss enabled mobile device | |
| US20040192345A1 (en) | Methods, systems and computer program products for providing location determination information to an assisted location service | |
| JP2003533063A (ja) | 移動ターミナルの位置を決定するための方法および装置 | |
| WO2008034728A1 (en) | Integrated mobile-terminal navigation | |
| US20090251364A1 (en) | Method and system of a mobile subscriber estimating position | |
| KR20140071785A (ko) | 항법위성시스템 수신기 및 그것의 의사거리 및 위치 계산 방법 | |
| JP5996577B2 (ja) | 受信されたsps信号の時間基準を入手するシステムおよび方法 | |
| CN114730018B (zh) | 对同时gnss接收和无线传输的管理 | |
| AU2013294159B2 (en) | Satellite positioning signal receiving method and device | |
| JPWO2013125344A1 (ja) | 測位信号検出方法、測位信号検出プログラム、測位信号受信装置、測位装置および情報機器端末 | |
| KR20130011129A (ko) | Gps 신호 획득 및 추적 장치와 그 방법 | |
| US20140002303A1 (en) | Apparatus and method for handling jamming signal | |
| WO2014079133A1 (zh) | 兼容gps、bd2和glonass系统的辅助同步方法 | |
| WO2011056879A2 (en) | Methods and apparatuses using mixed navigation system constellation sources for time setting | |
| KR20010051654A (ko) | 타이밍 측정 방법 | |
| JP6047944B2 (ja) | 受信装置及び相関積算処理方法 | |
| KR20010062101A (ko) | 시간 교정 방법 | |
| CN101506681B (zh) | 用于减少所接收sps信号中的模糊性的系统和/或方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130401 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130802 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131018 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140624 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140912 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20140924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141111 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5650436 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |