JP2011237390A - 加速度センサ - Google Patents
加速度センサ Download PDFInfo
- Publication number
- JP2011237390A JP2011237390A JP2010111424A JP2010111424A JP2011237390A JP 2011237390 A JP2011237390 A JP 2011237390A JP 2010111424 A JP2010111424 A JP 2010111424A JP 2010111424 A JP2010111424 A JP 2010111424A JP 2011237390 A JP2011237390 A JP 2011237390A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration sensor
- gap
- beam portion
- axis direction
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000001133 acceleration Effects 0.000 title claims abstract description 127
- 238000001514 detection method Methods 0.000 claims abstract description 13
- 230000005484 gravity Effects 0.000 claims description 7
- 230000035945 sensitivity Effects 0.000 abstract description 17
- 239000000758 substrate Substances 0.000 description 26
- 239000004065 semiconductor Substances 0.000 description 20
- 238000005530 etching Methods 0.000 description 17
- 238000004088 simulation Methods 0.000 description 12
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 11
- 229910052710 silicon Inorganic materials 0.000 description 11
- 239000010703 silicon Substances 0.000 description 11
- 238000006073 displacement reaction Methods 0.000 description 10
- 238000001020 plasma etching Methods 0.000 description 10
- 238000000034 method Methods 0.000 description 7
- 229910004298 SiO 2 Inorganic materials 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 5
- 239000012535 impurity Substances 0.000 description 5
- 238000000206 photolithography Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 2
- ZOXJGFHDIHLPTG-UHFFFAOYSA-N Boron Chemical compound [B] ZOXJGFHDIHLPTG-UHFFFAOYSA-N 0.000 description 1
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 1
- 229910018503 SF6 Inorganic materials 0.000 description 1
- 229910052796 boron Inorganic materials 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 229910052731 fluorine Inorganic materials 0.000 description 1
- 239000011737 fluorine Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005468 ion implantation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- SFZCNBIFKDRMGX-UHFFFAOYSA-N sulfur hexafluoride Chemical compound FS(F)(F)(F)(F)F SFZCNBIFKDRMGX-UHFFFAOYSA-N 0.000 description 1
- 229960000909 sulfur hexafluoride Drugs 0.000 description 1
Images





Landscapes
- Pressure Sensors (AREA)
Abstract
【解決手段】支持枠11と、支持枠11に対して変位可能に設けられた錘部12と支持枠11と錘部12と支持する可撓性を有する梁部13と、梁部13に、梁部13の幅方向の中心線上を含んで設けられている空隙部14と、梁部13に設けられているひずみ抵抗検出部Rとを備える加速度センサ10を構成する。
【選択図】図1
Description
従来の加速度センサの構造の一例を図6に示す。図6Aは、加速度センサのXY軸方向の平面図であり、図6Bは、図6Aに示す加速度センサのB−B’線断面図である。図6中において矢印は、加速度センサのX軸、Y軸及びZ軸方向を示している。
また、梁部103の上面には、ピエゾ抵抗素子Rx、Ry、Rzが形成されている。
上述の構成の加速度装置において、XY軸方向は、図7A及び図7Bに示すように、4つの梁部203のたわみとして、ピエゾ抵抗素子Rx1、Rx2、Rx3、Rx4、又は、ピエゾ抵抗素子Ry1、Ry2、Ry3、Ry4により各々の軸の逆相成分を検出している。
また、Z軸方向の加速度は、錘部102を支持している4つの梁部103により同相のたわみとして、ピエゾ抵抗素子Rz1、Rz2、Rz3、Rz4で検出している。
例えば、図7Aに示すように、X軸方向に加速度が加えられたときには、錘部102がX軸方向の加速度と逆相成分に変位する。このため、加速度方向の梁部103が、それぞれ伸縮する。また、錘部102は重心が梁部102との接続部分よりも下側にあるため、回転モーメントが発生する。そして、錘部図7Bに示すように、梁部103がそれぞれ、上下(Z)方向にひずむ。
このように、錘部102がX軸方向に変位したとき、Y軸方向の梁部103は、X軸方向に引っ張られると同時に、支持枠101と錘部102との間で、錘部102の回転によるねじり変形が発生する。
上述のように、従来の構造の加速度センサでは、構造上XY軸方向の検出感度を高くすることが困難であった。
本実施の形態の加速度センサの構成図を図1に示す。図1Aは、加速度センサのXY軸方向の平面図であり、図1Bは、図1Aに示す加速度センサのA−A’線断面図である。図1では、図示するX軸、Y軸、Z軸からなるXYZ三次元座標系を定義している。図1中において矢印は、加速度センサのX軸、Y軸及びZ軸方向を示している。
また、錘部12は、図1Bに示すようにZ軸方向の上面が、梁部13及び支持枠11と同一平面に形成され、Z軸方向の下方が梁部13に対して充分に深く形成されている。このため、錘部12は、梁部13と接続している位置よりも、充分に深い位置に重心を備えている。
また、梁部13には、支持枠11から錘部12までの全域にわたって空隙部14が形成され、さらに、Z軸方向に貫通して空隙部14が形成されている。このため、梁部13は、空隙部14により2本に分離されて構成されている。
なお、Z軸方向の加速度を検知するピエゾ抵抗素子は、X軸とY軸のどちらの梁部に形成してもよい。
空隙部14は、梁部13の中心線C上に形成され、XY平面上において、空隙部14の長手方向と、梁部13の長手方向が、ほぼ同一の方向となるように、平行に形成されている。また、空隙部14は、梁部13の幅方向の中心線C上であり、上述のピエゾ抵抗素子Rx、Ry、Rzの形成領域外に設けられている。
また、空隙部14が梁部13のねじれ中心軸に形成されていることが好ましい。
このねじり変形をする際に、梁部13にねじれを許容する構成の空隙部14を設けておくことにより、梁部13が容易にねじり変形を許容することができる。例えば、空隙部14を挟んで梁部がそれぞれ上下に変位することができ、梁部13が容易にねじり変形する。
まず、シリコン等の半導体基板を準備する。そして、半導体基板の一方の主面側にフォトリソグラフィを用いてレジストパターンを形成する。レジストパターンは、支持枠、錘部、及び、梁部を形成する部分を覆うパターンとする。そして、レジストパターンをマスクとして、RIE(Reactive Ion Etching)等を用いて半導体基体をエッチングする。このときのエッチングは、梁部を形成する厚さと同じ深さまで行う。このエッチングにより、加速度センサの梁部を形成することができる。
まず、フォトリソグラフィを用いて、半導体基体上にレジストパターンを形成する。このレジストパターンは、梁部に形成する空隙部以外を覆うパターンとする。そして、レジストパターンをマスクとして、RIE(Reactive Ion Etching)などを用いて半導体基体をエッチングする。このときのエッチングは、空隙部を形成する所定の深さまで行う。
なお、半導体基板の所定の領域に不純物ドープ層を形成する手法は、従来の半導体装置の製造方法と同様の方法により形成することができるため、詳細な説明は省略する。
まず、半導体基板の裏面側に、フォトリソグラフィを用いてレジストパターンを形成する。このとき形成するレジストパターンは、支持枠、及び、錘部を形成する部分を覆うパターンとする。
次に、レジストパターンをマスクとして、Deep RIE法を用いて半導体基体をエッチングする。このときのエッチングは、上述の梁部を形成する工程において半導体基体をエッチングした位置まで行う。
Deep RIEは、エッチングステップとエッチング壁面保護ステップとを交互に行いながら、半導体基体をエッチングする方法である。エッチングステップは、例えば、主に六フッ化硫黄(SF6)を用いて等方エッチングを行う。また、保護ステップは、例えば、C4F8等のフッ素系ガスを用いて側壁を保護する。側壁を保護することで横方向のエッチングを抑制する。
この工程により、支持枠と錘部との間に、梁部を除く貫通穴を形成する。上述のDeep RIE法によるエッチングは、半導体基体の一方の主面側から梁部の厚さまでと同じ深さまで行う。このエッチングにより、加速度センサの梁部を形成することができる。
なお、空隙部を、梁部のZ軸方向に貫通している構成とする場合には、上述の梁部を形成するためのエッチングと同時に行うことができる。例えば、半導体基板の一方の主面側にフォトリソグラフィを用いて支持枠、錘部、及び、梁部を形成する部分を覆い、空隙部を形成する部分が開口されたレジストパターンを形成する。そして、RIE等を用いて梁部を形成する厚さと同じ深さまで半導体基体をエッチングする。この工程により、半導体基板の一方の主面側に、梁部と空隙部とを同時に形成することができる。そして、上述の製造方法と同じ工程により、本実施の形態の加速度センサを製造することができる。
以上のように、SOI基板を用いると精度良く加速度センサを製造することができる。
(実施例1)
上述の実施の形態の加速度センサについて、以下の構成の加速度センサによるシミュレーションを行った。
錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、梁部の長さが50μmであり、空隙が設けられている部分の梁部の幅は10μmであり、梁部の幅の合計は20μmであり、空隙部の幅方向の長さが10μmである。
また、比較として、図6に示す、梁部に空隙部を設けていない従来構造の加速度センサを作製した。作製した比較例の加速度センサの各構成のサイズを示す。錘部はXY軸方向の長さが100μmの正方形であり、Z軸方向の長さが500μmであり、錘部と梁部との距離が50μmであり、梁部の幅が20μmである。
図2Bは、上記の実施例の加速度センサのシミュレーションにおいて、梁部13Aにおいて大きくひずみが発生した支持枠11から10μmの位置と、40μmの位置でのひずみを表している。図2Bは、縦軸に梁部13Aのひずみεを示している。また、横軸に、加速度センサに加える外力の角度(位相)を示している。
また、比較例の加速度センサについて、上述の実施例の加速度センサと同様にシミュレーションを行った結果を図3A,Bに示す。
梁部に空隙部を設ける構成とすることにより、加速度センサにXY成分の加速度が加わると、錘部は回転運動をする。このとき、梁部に空隙部が設けられていると、この空隙部を中心軸として回転しやすくなる。つまり、加速度センサの4つの梁部に空隙部を設けることにより、この空隙部を中心軸としてXY軸に回転しやすくなる。これをXY成分に平行な梁でひずみを測るとシミュレーションでは、空隙部を設けない構成とした場合に比べ、約1.5倍のひずみが発生することが分かる。従って、梁部に空隙部を設ける構成とすることにより、非常に効果かがあることがわかる。
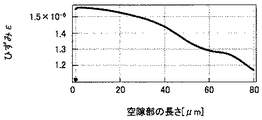
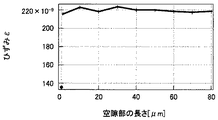
加速度センサにおいて、空隙部の幅方向の長さを変化させたときのひずみεをシミュレーションを行った。実施例1と同様の図1に示す構成の加速度センサを、梁部の幅方向の空隙部の長さを変化させて作製した。
このように、梁部に空隙部を設けることにより、Z軸方向の加速度に対しても、加速度センサの検出感度を向上させることができる。
Claims (6)
- 支持枠と、
前記支持枠に対して変位可能に設けられた錘部と
前記支持枠と前記錘部と支持する可撓性を有する梁部と、
前記梁部に、前記梁部の幅方向の中心線上を含んで設けられている空隙部と、
前記梁部に設けられているひずみ抵抗検出部とを備える
ことを特徴とする加速度センサ。 - 前記梁部の幅方向の中心線と、前記空隙部の幅方向の中心線がほぼ同じ方向であるように前記空隙が設けられていることを特徴とする請求項1に記載の加速度センサ。
- 前記空隙部の幅方向の中心線が、前記錘部の重心点を通るように前記空隙が設けられていること特徴とする請求項1又は2に記載の加速度センサ。
- 前記空隙が、前記梁部のねじれ中心軸を含んで設けられていることを特徴とする請求項1〜3のいずれかに記載の加速度センサ。
- 前記梁部が、前記空隙部により複数本に分離されていることを特徴とする請求項1〜4のいずれかに記載の加速度センサ。
- 前記ひずみ抵抗検出部がピエゾ抵抗素子からなることを特徴とする請求項1〜5のいずれかに記載の加速度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010111424A JP2011237390A (ja) | 2010-05-13 | 2010-05-13 | 加速度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010111424A JP2011237390A (ja) | 2010-05-13 | 2010-05-13 | 加速度センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011237390A true JP2011237390A (ja) | 2011-11-24 |
Family
ID=45325516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010111424A Pending JP2011237390A (ja) | 2010-05-13 | 2010-05-13 | 加速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011237390A (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61139719A (ja) * | 1984-12-12 | 1986-06-27 | Nissan Motor Co Ltd | 半導体回転センサ |
| JPH05172843A (ja) * | 1991-12-25 | 1993-07-13 | Omron Corp | 半導体加速度センサ |
| JPH06194380A (ja) * | 1992-12-24 | 1994-07-15 | Nippon Seiki Co Ltd | 半導体加速度センサ |
| JPH11242050A (ja) * | 1998-02-24 | 1999-09-07 | Matsushita Electric Works Ltd | 3軸加速度センサ |
| JP2005283402A (ja) * | 2004-03-30 | 2005-10-13 | Fujitsu Media Device Kk | 慣性センサ |
-
2010
- 2010-05-13 JP JP2010111424A patent/JP2011237390A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61139719A (ja) * | 1984-12-12 | 1986-06-27 | Nissan Motor Co Ltd | 半導体回転センサ |
| JPH05172843A (ja) * | 1991-12-25 | 1993-07-13 | Omron Corp | 半導体加速度センサ |
| JPH06194380A (ja) * | 1992-12-24 | 1994-07-15 | Nippon Seiki Co Ltd | 半導体加速度センサ |
| JPH11242050A (ja) * | 1998-02-24 | 1999-09-07 | Matsushita Electric Works Ltd | 3軸加速度センサ |
| JP2005283402A (ja) * | 2004-03-30 | 2005-10-13 | Fujitsu Media Device Kk | 慣性センサ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9061895B2 (en) | Micromechanical structure comprising a mobile part having stops for out-of plane displacements of the structure and its production process | |
| CN103869100B (zh) | 微机电 z 轴面外止挡件 | |
| US9513310B2 (en) | High-sensitivity, z-axis micro-electro-mechanical detection structure, in particular for an MEMS accelerometer | |
| US8671756B2 (en) | MEMS biaxial resonant accelerometer | |
| US7617729B2 (en) | Accelerometer | |
| EP3156804B1 (en) | Microelectromechanical sensor device with reduced stress sensitivity | |
| EP3151018B1 (en) | Mems sensor with reduced cross-axis sensitivity | |
| CN103713158B (zh) | 加速度传感器 | |
| CN101467050B (zh) | 加速度传感器 | |
| CN217180964U (zh) | 微机电传感器器件以及电子系统 | |
| EP3564682B1 (en) | Inertial sensor with single proof mass and multiple sense axis capability | |
| JP3956999B2 (ja) | 加速度センサ | |
| KR20170004123A (ko) | 센서 소자 및 그 제조 방법 | |
| US10775171B2 (en) | MEMS gyroscope with improved rejection of a quadrature error | |
| EP2990807B1 (en) | Resonant sensor | |
| WO2008038537A1 (en) | Acceleration sensor | |
| JP2011237390A (ja) | 加速度センサ | |
| KR102774922B1 (ko) | 미세 기계 센서 | |
| WO2011161917A1 (ja) | 加速度センサ | |
| Mohammed et al. | High dynamic range Z-axis hybrid spring MEMS capacitive accelerometer | |
| Fujiyoshi et al. | An SOI 3-axis accelerometer with a zigzag-shaped Z-electrode for differential detection | |
| US9964561B2 (en) | Acceleration sensor | |
| JP5046240B2 (ja) | 加速度センサの製造方法 | |
| US8984942B2 (en) | Suspended masses in micro-mechanical devices | |
| JP6020590B2 (ja) | 角加速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20130405 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130412 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20130405 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131008 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140225 |