JP2012108630A - 無人搬送車の走行制御装置、および無人搬送車 - Google Patents
無人搬送車の走行制御装置、および無人搬送車 Download PDFInfo
- Publication number
- JP2012108630A JP2012108630A JP2010255527A JP2010255527A JP2012108630A JP 2012108630 A JP2012108630 A JP 2012108630A JP 2010255527 A JP2010255527 A JP 2010255527A JP 2010255527 A JP2010255527 A JP 2010255527A JP 2012108630 A JP2012108630 A JP 2012108630A
- Authority
- JP
- Japan
- Prior art keywords
- section
- travel
- guide
- sensor output
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【課題】走行ガイド、ステーション等の位置ずれを修正しなくても、安定して走行・荷役を行うことができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2は、複数の区間に区分けされた走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号を出力するガイドセンサ3a、3bと、現在走行中の区間である現区間を特定する区間特定手段4a、4b、10と、区間毎の目標センサ出力値が予め格納された記憶部11と、記憶部11を参照して現区間に応じた目標センサ出力値を取得し、ガイドセンサ3a、3bから出力されるセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
【選択図】図2
【解決手段】本発明に係る走行制御装置2は、複数の区間に区分けされた走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号を出力するガイドセンサ3a、3bと、現在走行中の区間である現区間を特定する区間特定手段4a、4b、10と、区間毎の目標センサ出力値が予め格納された記憶部11と、記憶部11を参照して現区間に応じた目標センサ出力値を取得し、ガイドセンサ3a、3bから出力されるセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
【選択図】図2
Description
本発明は、走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置、および無人搬送車に関する。
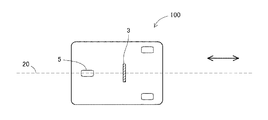
従来から、工場や倉庫等においては、ステーションから別のステーションへと荷物を搬送する荷役手段として無人搬送車が使用されている。図7に示すように、従来の無人搬送車100は、走行経路に沿って敷設された走行ガイド20を検知するガイドセンサ3と、操舵輪5を含む複数の車輪を備え、走行ガイド20がガイドセンサ3の幅方向中心にくるように操舵輪5の操舵角が制御される(例えば、特許文献1参照)。
走行ガイド20としては、例えば、路面近傍に埋設された磁性材料からなる磁気棒が使用される。この場合、ガイドセンサ3としては、磁気棒によって生じた磁界の強度を検出する磁気センサが使用される。
この他、走行ガイド20としては、路面上に貼り付けられた磁気テープや色付テープを使用することもできる。しかしながら、これらの走行ガイド20は、剥がれや色褪せが生じた場合に面倒な補修作業が必要となる。したがって、補修作業を行いたくない場合は、路面に埋設する磁気棒を走行ガイド20として使用することが多い。
ところで、無人搬送車100によって荷役を行う工場や倉庫を設計する際には、該無人搬送車100が障害物に接触することなく安定して走行・荷役が行えるように走行経路が決定され、走行ガイド20の敷設位置が計画される。しかしながら、実際には施工誤差が少なからず発生するので、計画通りに走行ガイド20が敷設されなかったり、ステーションや他の設備の位置がずれたりして、予定していた走行・荷役が行えない場合がある。
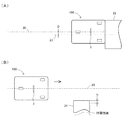
例えば、図8(A)は、走行ガイド20またはステーション22の位置がずれたために、走行ガイド20とステーション中心線23とが距離Dだけずれた場合であるが、この場合は、ステーション22と無人搬送車100との間での荷物の移積に失敗するおそれがある。また、図8(B)は、他の設備24が走行ガイド20の方に距離Dだけずれて設置された場合であるが、この場合は、他の設備24と無人搬送車100の間の距離を十分に確保することができず、衝突の危険がある。
このため、従来の無人搬送車100によって荷役を行う工場や倉庫において上記のずれが発生した場合は、走行ガイド20、ステーション22または他の設備24の位置を計画にしたがって修正する必要があり、手間とコストがかかっていた。
本発明は上記事情に鑑みてなされたものであって、走行ガイド、ステーション等の位置ずれを修正しなくても、安定して走行・荷役を行うことができる無人搬送車の走行制御装置、および無人搬送車を提供することにある。
上記課題を解決するために、本発明に係る走行制御装置は、複数の区間に区分けされた走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号を出力するガイドセンサと、現在走行中の区間である現区間を特定する区間特定手段と、区間毎の目標センサ出力値が予め格納された記憶部と、記憶部を参照して現区間に応じた目標センサ出力値を取得し、ガイドセンサから出力されたセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部とを備えたことを特徴としている。
この構成によれば、無人搬送車を走行ガイドから意図的にオフセットして走行させることができる。また、そのオフセット量は、区間毎に任意に設定することができる。したがって、この構成によれば、走行ガイド、ステーション等の位置ずれが生じた場合においても、ずれた分だけ無人搬送車をオフセットして走行させることができるので、走行ガイド、ステーション等の位置ずれを修正しなくても安定して走行・荷役を行うことができる。
上記走行制御装置において、目標センサ出力値は、標準センサ出力値に対するオフセット値として格納されていてもよい。
上記走行制御装置の区間特定手段は、例えば、走行ガイド近傍に設けられたマーカの存在を検知する区間センサと、検知されたマーカの数を積算することにより現区間を特定する区間特定部とから構成することができる。
上記走行制御装置の区間特定手段は、例えば、走行ガイド近傍に設けられたマーカに記憶されている区間情報を読み取る区間センサと、読み取られた区間情報に基づいて現区間を特定する区間特定部とから構成することもできる。
また、上記課題を解決するために、本発明に係る無人搬送車は、上記いずれかの走行制御装置と、少なくとも1つの操舵輪と、走行制御装置の制御下で操舵輪の操舵角を変化させるモータとを備えたことを特徴としている。
本発明によれば、走行ガイド、ステーション等の位置ずれを修正しなくても、安定して走行・荷役を行うことができる無人搬送車の走行制御装置、および無人搬送車を提供することができる。
以下、添付図面を参照して、本発明に係る無人搬送車の走行制御装置および無人搬送車の好ましい実施形態について説明する。
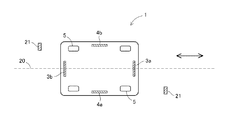
図1に、本発明に係る無人搬送車および該無人搬送車が使用される環境(工場、倉庫等)の概略図を示す。同図に示すように、無人搬送車1は、車両前部および後部に各1つ設けられたガイドセンサ3a、3bと、車両右部および左部に各1つ設けられた区間センサ4a、4bと、車両四隅に設けられた操舵輪5とを備えている。各ガイドセンサ3a、3bおよび各区間センサ4a、4bは、路面に向けて配置されている。また、操舵輪5のいくつかは駆動輪としての機能も兼ね備えている。
路面には、走行ガイド20およびマーカ21が敷設されている。本実施形態に係る走行ガイド20は、断面形状が数mm角、長さが1mの磁性材料からなる磁気棒で構成され、路面の表面近傍に切れ目なく埋め込まれている。本実施形態に係るマーカ21も磁性材料からなり、路面の表面近傍に埋め込まれている。
走行ガイド20は、無人搬送車1の走行経路に沿って敷設されている。また、走行経路は複数の区間に区分けされており、各区間の境界に少なくとも1つのマーカ21が設けられている。
無人搬送車1のガイドセンサ3a、3bおよび区間センサ4a、4bは、磁気センサからなる。ガイドセンサ3a、3bは、走行ガイド20周辺の磁界の強度を検出する。また、区間センサ4a、4bは、マーカ21周辺の磁界の強度を検出する。図1に示すように、マーカ21は走行ガイド20から左右に一定距離離間した位置に設けられているので、走行ガイド20による磁界とマーカ21による磁界が、互いに影響を及ぼし合うことはない。
無人搬送車1は、基本的に、走行ガイド20がガイドセンサ3a、3bの幅方向中心にくるように制御される。具体的には、走行ガイド20の位置がガイドセンサ3a、3bの左側に寄っている場合は、操舵輪5が反時計回りに旋回し、進行方向が左側に向けられる。一方、走行ガイド20の位置がガイドセンサ3a、3bの右側に寄っている場合は、操舵輪5が時計回りに旋回し、進行方向が右側に向けられる。
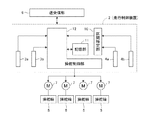
図2は、無人搬送車1の内部構造を示すブロック図である。同図に示すように、無人搬送車1は、基地局からの指令を受け取るとともに、無人搬送車1に関する情報を基地局に送る送受信部6と、基地局からの指令された荷役を行うために、各センサから得た情報に基づいて操舵輪5の操舵角を制御する走行制御装置2と、走行制御装置2の制御下で操舵輪5の操舵角を変化させるモータ7とを備えている。
走行制御装置2は、前記ガイドセンサ3a、3bと、前記区間センサ4a、4bと、区間特定部10と、記憶部11と、操舵制御部12とからなる。このうち、区間特定部10、記憶部11および操舵制御部12は、マイコンおよび該マイコンの制御下でモータ7を駆動するインバータ回路等から構成されている。
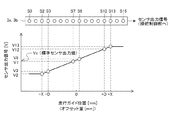
図3に示すように、ガイドセンサ3a、3bは、例えば、S0〜S15で表された計16個の単位磁気センサを横一列に並べたものであり、走行ガイド20の位置に応じたセンサ出力信号を操舵制御部12に向けて出力する。より具体的には、ガイドセンサ3a、3bは、走行ガイド20がガイドセンサ3a、3bの幅方向中心(走行ガイド位置=0[mm])に位置するときはV7およびV8の中間電圧値Vc、走行ガイド20が単位磁気センサS2の真下に位置するときは電圧値V2、走行ガイド20が単位磁気センサS13の真下に位置するときは電圧値V13を有するセンサ出力信号を出力する。
再び図2を参照して、区間センサ4a、4bは、マーカ21の中心にくると信号を出力する。区間特定部10は、区間センサ4a、4bからの信号を検出した回数、すなわち通過したマーカ21の数の積算値に基づいて、現在走行中の区間である現区間を特定する。区間特定部10は、特定した現区間に関する信号を操舵制御部12に向けて出力する。なお、区間センサ4a、4bおよび区間特定部10は、本発明の“区間特定手段”を構成する。
記憶部11には、区間毎の目標センサ出力値が予め格納されている。図4に示すように、目標センサ出力値は、走行ガイド20がガイドセンサ3a、3bの幅方向中心にくるように走行させたい区間、すなわち走行ガイド20に沿って無人搬送車1を走行させたいほとんどの区間においてはVcであるが、走行ガイド20から左右いずれかの方向にオフセットさせて走行させたい区間(区間3および区間9)についてはVc以外の値となっている。
操舵制御部12は、区間特定部10から出力された現区間に関する信号を受け取った後、記憶部11を参照して、現区間に応じた目標センサ出力値を取得する。そして、取得した目標センサ出力値と、ガイドセンサ3a、3bから出力されたセンサ出力信号の電圧値とをそれぞれ比較して、両者の間に差があれば、その差が極小となるようにモータ7を駆動して操舵輪5の操舵角を変更する。一方、両者に差がなければ、操舵制御部12は、操舵輪5の操舵角を現状のまま維持する。このような制御は、PI制御、PID制御等により実現することができる。
結局、本発明に係る走行制御装置2によれば、予め記憶部11にVc以外の目標センサ出力値を格納しておくことにより、無人搬送車1を走行ガイド20から意図的にオフセットして走行させることができる。
次に、図5および図6を参照して、走行制御装置2による走行制御の具体例について説明する。なお、いずれの具体例においても、記憶部11には図4に示す目標センサ出力値が予め格納されているものとする。
図5は、走行ガイド20が計画通りに敷設されなかったか、ステーション22が計画通りに設置されなかったか、またはその両方の理由により、本来一致すべき走行ガイド20とステーション中心線23とが距離Dだけずれた場合である。この場合、無人搬送車1を走行ガイド20に沿って走行させると、図8(A)に示すような状態となって、ステーション22と無人搬送車1との間での荷物の移積に失敗するおそれがある。
しかしながら、本具体例では、区間2の目標センサ出力値がVc、区間3の目標センサ出力値がV3となっているので、無人搬送車1は、区間2では走行ガイド20がガイドセンサ3a、3bの幅方向中心(走行ガイド位置=0[mm])にくるように走行制御される(図5(A)参照)。そして、マーカ21を通過して区間3に入ると、無人搬送車1は、センサ出力信号の電圧値がV3となるように走行制御される。すなわち、無人搬送車1は、走行ガイド20がガイドセンサ3a、3bの幅方向中心から距離Dだけ離れた単位磁気センサS3の真下にくるように走行制御される(図3、図5(B)参照)。これにより、無人搬送車1は、ステーション中心線23をガイドセンサ3a、3bの幅方向中心に捉えながら走行することができる。
ステーション22との間で荷物の移積を終えた後、マーカ21を再び通過して区間2に入ると、無人搬送車1は、走行ガイド20がガイドセンサ3a、3bの幅方向中心にくるように走行制御される(図5(C)参照)。
図6は、他の設備24が走行ガイド20の方に距離Dだけずれて配置された場合である。この場合、無人搬送車1を走行ガイド20に沿って走行させると、他の設備24と無人搬送車1の間の距離を十分に確保することができず、無人搬送車1が他の設備24に衝突するおそれがある。
しかしながら、本具体例では、区間8および区間10の目標センサ出力値がVc、区間9の目標センサ出力値がV12となっているので、無人搬送車1は、区間8および区間10では走行ガイド20がガイドセンサ3a、3bの幅方向中心にくるように走行制御され(図6(A)(C)参照)、区間9では、センサ出力信号の電圧値がV12となるように走行制御される(図6(B)参照)。すなわち、区間9を走行中の無人搬送車1は、走行ガイド20がガイドセンサ3a、3bの幅方向中心から距離Dだけ離れた単位磁気センサS12の真下にくるように走行制御される(図3参照)。これにより、無人搬送車1は、他の設備24に衝突することなく走行することができる。
結局、本発明に係る走行制御装置2によれば、無人搬送車1を走行ガイド20から意図的にオフセットして走行させることができる。また、そのオフセット量は、区間毎に任意に設定することができる。したがって、本発明に係る走行制御装置2によれば、走行ガイド20、ステーション22、他の設備24の位置ずれが生じた場合においても、ずれた分だけ無人搬送車1をオフセットして走行させることができるので、位置ずれを修正しなくても安定して走行・荷役を行うことができる。
以上、本発明に係る走行制御装置および無人搬送車の好ましい実施形態について説明したが、本発明は上記の構成に限定されるものではない。
例えば、上記実施形態では、車両四隅に操舵輪5を備えた全方向に走行可能な無人搬送車1を一例に挙げて説明したが、本発明はその他の無人搬送車にも適用可能である。
また、上記実施形態では、センサ出力信号の電圧値と直接対比可能な目標センサ出力値が記憶部11に格納されていることとしたが、目標センサ出力値は、標準センサ出力値(Vc)に対するオフセット値として格納されていてもよい。この場合は、操舵制御部12においてオフセット値と標準センサ出力値とを足し合わせた値が求められ、この値とセンサ出力信号の電圧値との差に基づいて走行制御が行われる。
また、上記実施形態では、マーカ21の数を積算することによって現区間を特定したが、マーカ21に該マーカ21が設けられている区間の区間情報を記憶させ、区間センサ4a、4bで該区間情報を読み取ることにより、現区間を特定してもよい。なお、このようなマーカ21としては例えばRFIDタグがある。
また、上記実施形態では、走行ガイド20として磁気棒を使用したが、これに代えて、磁気テープや色付テープを使用することもできる。
1 無人搬送車
2 走行制御装置
3a、3b ガイドセンサ
4a、4b 区間センサ
5 操舵輪
6 送受信部
7 モータ
10 区間特定部
11 記憶部
12 操舵制御部
20 走行ガイド
21 マーカ
22 ステーション
23 ステーション中心線
24 他の設備
S0〜S15 単位磁気センサ
2 走行制御装置
3a、3b ガイドセンサ
4a、4b 区間センサ
5 操舵輪
6 送受信部
7 モータ
10 区間特定部
11 記憶部
12 操舵制御部
20 走行ガイド
21 マーカ
22 ステーション
23 ステーション中心線
24 他の設備
S0〜S15 単位磁気センサ
Claims (5)
- 複数の区間に区分けされた走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置であって、
前記走行ガイドとの相対位置に応じたセンサ出力信号を出力するガイドセンサと、
現在走行中の前記区間である現区間を特定する区間特定手段と、
前記区間毎の目標センサ出力値が予め格納された記憶部と、
前記記憶部を参照して前記現区間に応じた前記目標センサ出力値を取得し、前記ガイドセンサから出力された前記センサ出力信号の値と前記目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部と、
を備えたことを特徴とする走行制御装置。 - 前記目標センサ出力値は、標準センサ出力値に対するオフセット値として格納されていることを特徴とする請求項1に記載の走行制御装置。
- 前記区間特定手段は、
前記走行ガイド近傍に設けられたマーカの存在を検知する区間センサと、
検知された前記マーカの数を積算することにより前記現区間を特定する区間特定部と、
を有することを特徴とする請求項1または2に記載の走行制御装置。 - 前記区間特定手段は、
前記走行ガイド近傍に設けられたマーカに記憶されている区間情報を読み取る区間センサと、
読み取られた前記区間情報に基づいて前記現区間を特定する区間特定部と、
を有することを特徴とする請求項1または2に記載の走行制御装置。 - 請求項1〜4のいずれかに記載の走行制御装置と、
少なくとも1つの操舵輪と、
前記走行制御装置の制御下で前記操舵輪の操舵角を変化させるモータと、
を備えたことを特徴とする無人搬送車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010255527A JP2012108630A (ja) | 2010-11-16 | 2010-11-16 | 無人搬送車の走行制御装置、および無人搬送車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010255527A JP2012108630A (ja) | 2010-11-16 | 2010-11-16 | 無人搬送車の走行制御装置、および無人搬送車 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012108630A true JP2012108630A (ja) | 2012-06-07 |
Family
ID=46494193
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010255527A Pending JP2012108630A (ja) | 2010-11-16 | 2010-11-16 | 無人搬送車の走行制御装置、および無人搬送車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012108630A (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08256522A (ja) * | 1995-03-27 | 1996-10-08 | Hitachi Ltd | 無人芝刈りシステム |
| JPH1185271A (ja) * | 1997-09-08 | 1999-03-30 | Kubota Corp | 移動車の誘導制御装置 |
| JP2002373023A (ja) * | 2001-06-14 | 2002-12-26 | Nippon Yusoki Co Ltd | 自動誘導式荷役車両 |
| JP2003044137A (ja) * | 2001-07-31 | 2003-02-14 | Isuzu Motors Ltd | 自動操舵装置 |
| JP2008033760A (ja) * | 2006-07-31 | 2008-02-14 | Secom Co Ltd | 移動ロボット |
-
2010
- 2010-11-16 JP JP2010255527A patent/JP2012108630A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08256522A (ja) * | 1995-03-27 | 1996-10-08 | Hitachi Ltd | 無人芝刈りシステム |
| JPH1185271A (ja) * | 1997-09-08 | 1999-03-30 | Kubota Corp | 移動車の誘導制御装置 |
| JP2002373023A (ja) * | 2001-06-14 | 2002-12-26 | Nippon Yusoki Co Ltd | 自動誘導式荷役車両 |
| JP2003044137A (ja) * | 2001-07-31 | 2003-02-14 | Isuzu Motors Ltd | 自動操舵装置 |
| JP2008033760A (ja) * | 2006-07-31 | 2008-02-14 | Secom Co Ltd | 移動ロボット |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR960000882B1 (ko) | 이동차의 주행제어 설비 | |
| EP3165422B1 (en) | Systems and methods for sensing a load carried by a material handling vehicle | |
| US20100039293A1 (en) | Localisation of vehicle or mobile objects based on embedded rfid tags | |
| CN101795923A (zh) | 自动运输装载系统及方法 | |
| CN109466903A (zh) | 一种多托盘自动搬运车及其搬运方法 | |
| US11242229B2 (en) | Arrangement of a gantry lifting device and of a row of spaced-apart marking elements | |
| CN104950895B (zh) | 仓储物流用rfid及视觉识别导航车的导航控制方法 | |
| JP2014189393A (ja) | コンテナターミナル | |
| JP2012108630A (ja) | 無人搬送車の走行制御装置、および無人搬送車 | |
| JP5158724B2 (ja) | 無人搬送車の走行制御装置、および無人搬送車 | |
| CN118519437A (zh) | 自动导引车、仓储系统及自动导引车的导航定位方法 | |
| JP7698185B2 (ja) | 無人搬送車ルート案内システム、無人搬送車ルート案内方法 | |
| JP2784253B2 (ja) | 移動車の走行制御装置 | |
| US12608023B2 (en) | Article transport facility | |
| JP7294029B2 (ja) | 物品搬送設備 | |
| CN115003612B (zh) | 运输器和用于运输对象的方法 | |
| JP2022042165A (ja) | 無人走行台車および無人走行台車を用いた搬送システム | |
| JP2010020515A (ja) | 無人車両 | |
| KR102765172B1 (ko) | 반송 시스템 | |
| JP5157054B2 (ja) | 運搬装置、運搬装置の進入制限システム | |
| KR102898317B1 (ko) | 물품 반송 설비 | |
| JP7729309B2 (ja) | 搬送設備 | |
| JP2974110B2 (ja) | 移動車制御設備 | |
| US12321885B2 (en) | Physical distribution management system and physical distribution management method | |
| EP3170786B1 (en) | Guide for loading and unloading equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120620 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121107 |