JP2012140979A - 車両用能動型防振装置 - Google Patents
車両用能動型防振装置 Download PDFInfo
- Publication number
- JP2012140979A JP2012140979A JP2010292095A JP2010292095A JP2012140979A JP 2012140979 A JP2012140979 A JP 2012140979A JP 2010292095 A JP2010292095 A JP 2010292095A JP 2010292095 A JP2010292095 A JP 2010292095A JP 2012140979 A JP2012140979 A JP 2012140979A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- control signal
- road
- restriction
- magnitude
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
- Combined Devices Of Dampers And Springs (AREA)
- Vibration Prevention Devices (AREA)
Abstract
【課題】悪路を走行し始めた場合と悪路から良路へ復帰した場合とにおいて所望の状態を達成できる車両用能動型防振装置を提供する。
【解決手段】路面から伝達される振動に基づいて振動検出部140により検出される振動の大きさenが閾値Thを超えた場合に、電磁アクチュエータを制御する制御信号ynを制限する。このときの1回当たりに制限する制御信号ynの制限量は、制限していない状態の制御信号ynに対して予め設定された一部割合とする。また、制御信号ynを制限している場合であって、振動検出部140により検出される振動の大きさenが閾値Thを下回った場合に、制御信号ynの制限を解除する。このときの1回当たりに制限解除する制御信号ynの制限解除量は、制限していない状態の制御信号ynに対して予め設定された一部割合とする。
【選択図】図5
【解決手段】路面から伝達される振動に基づいて振動検出部140により検出される振動の大きさenが閾値Thを超えた場合に、電磁アクチュエータを制御する制御信号ynを制限する。このときの1回当たりに制限する制御信号ynの制限量は、制限していない状態の制御信号ynに対して予め設定された一部割合とする。また、制御信号ynを制限している場合であって、振動検出部140により検出される振動の大きさenが閾値Thを下回った場合に、制御信号ynの制限を解除する。このときの1回当たりに制限解除する制御信号ynの制限解除量は、制限していない状態の制御信号ynに対して予め設定された一部割合とする。
【選択図】図5
Description
本発明は、車両のエンジンの駆動によって、車両を構成する防振対象部材が振動することを能動的に抑制する車両用能動型防振装置に関するものである。
特許文献1(特開2006−349028号公報)に記載の能動型エンジンマウントは、悪路走行中に電磁アクチュエータの制御を停止し、悪路から良路へ復帰した場合に電磁アクチュエータの制御を復帰するとされている。また、特許文献2(特開平10−318325号公報)に記載の能動型エンジンマウントは、悪路を走行して路面から車体に伝達される振動レベルが大きいときに、電磁アクチュエータの制御信号を段階的に低くして、当該振動レベルが小さくなると制御信号を復帰させるとされている。ここでは、複数回の振動レベルの積算値が閾値を超えた場合に、悪路であると判定している。
また、能動型防振装置として、能動型エンジンマウントの他に、特許文献3(特開2004−044680号公報)に記載の能動型ダイナミックダンパがある。
特許文献1,2などに記載の能動型エンジンマウントにおいては、加振体が非常に大きく振動することを防止するために、加振体用ストッパが設けられているものがある。そして、車両が悪路を走行する際に、電磁アクチュエータを駆動させると加振体が非常に大きく振動するおそれがある。そこで、特許文献1,2に記載のように、車両が悪路を走行する際に、電磁アクチュエータの制御信号を小さくすることで、加振体が加振体用ストッパに当接することを抑制できる。
また、能動型エンジンマウントにおいて、エンジン側取付部材が非常に大きく振動することを防止するために、取付部材用ストッパが設けられているものがある。そして、能動型エンジンマウントにおいては、加振体が振動することに伴って、受圧室の液圧変動によりエンジン側取付部材の振動が変化する。そのため、車両が悪路を走行する際に、加振体の振動に伴って、エンジン側取付部材が非常に大きく振動するおそれがある。このことについても、特許文献1,2に記載のように、車両が悪路を走行する際に、電磁アクチュエータの制御信号を小さくすることで、エンジン側取付部材が取付部材用ストッパに当接することを抑制できる。
また、特許文献3に記載の能動型ダイナミックダンパには、加振体が非常に大きく振動することを防止するために、ストッパが設けられているものがある。そこで、特許文献1,2に記載の技術を適用して、車両が悪路を走行する際に、電磁アクチュエータの制御信号を小さくすることで、加振体がストッパに当接することを抑制できる。
ところで、特許文献2においては、現在および過去数回分の車体の振動レベルの積算値が閾値を超えた場合に、電磁アクチュエータの制御信号を段階的に低くしている。つまり、悪路の誤判定を防止するために、現在および過去数回分の車体の振動レベルの積算値を用いて判定している。そのため、悪路を走行し始めてから電磁アクチュエータの制御信号を低くし始めるまでの間に、一定時間を要する。つまり、当該一定時間の間に、加振体の振動が大きくなるおそれがある。その結果、能動型エンジンマウントにおける加振体自体またはエンジン側取付部材、もしくは能動型ダイナミックダンパにおける加振体自体がストッパに当接するおそれがある。そうすると、能動型エンジンマウントにおける加振体自体またはエンジン側取付部材、もしくは能動型ダイナミックダンパにおける加振体自体がストッパに当接することによる異音が発生するという問題が生じる。
そこで、特許文献2に記載のように車体の振動レベルが大きくなると電磁アクチュエータの制御信号を段階的に低くすることを、悪路を走行している可能性があると判定された直後から実行することを考える。そうすることで、仮に、悪路の誤判定をしたとしても、制御信号の一部割合を制限するだけであるため、振動抑制効果が完全になくなることにはならない。
ここで、特許文献2に記載のように悪路から良路に復帰したと判定した場合に、電磁アクチュエータの制御信号の制限を解除している。この制限解除も、制限する場合と同様に、現在および過去数回分の車体の振動レベルの積算値が閾値を下回った場合に実行している。つまり、悪路から良路への復帰の誤判定を防止しているものと考えられる。これでは、上記と同様に、悪路から良路へ復帰したにも関わらず、電磁アクチュエータの制御信号が大きく制限された状態が継続している。
仮に、悪路から良路への復帰直後に、電磁アクチュエータの制御信号の制限を解除した場合には、以下の問題を生じる。一般に、電磁アクチュエータの制御周期は、悪路走行中における車体の振動レベルの振動周期に比べると短くなる。そのため、電磁アクチュエータの制御周期において、悪路ではないと判定された瞬間であっても、実際には悪路走行中である場合がある。つまり、実際には悪路走行中であるにも関わらず、電磁アクチュエータの制御周期において悪路でないと判定されてしまうと、その直後に電磁アクチュエータの制御信号の制限が解除されることになる。そうすると、実際には悪路走行中であるため、加振体が大きく振動して、能動型エンジンマウントにおける加振体自体またはエンジン側取付部材、もしくは能動型ダイナミックダンパにおける加振体自体がストッパに当接するおそれがある。
従って、悪路を走行し始めた直後から電磁アクチュエータの制御信号を制限させつつも、悪路の誤判定をした場合でも十分な振動抑制効果を発揮できることが望まれる。さらに、悪路から良路へ復帰した場合にも、その直後から電磁アクチュエータの制御信号の制限を復帰させつつも、悪路から良路への誤判定をした場合でも十分に電磁アクチュエータの制御信号を制限することが望まれる。
本発明は、このような事情に鑑みてなされたものであり、悪路を走行し始めた場合と悪路から良路へ復帰した場合とにおいて上述した所望の状態を達成できる車両用能動型防振装置を提供することを目的とする。
本発明の車両用能動型防振装置は、車両に設けられた防振対象部材と、前記防振対象部材に対して相対的に振動可能となるように、弾性体を介して前記防振対象部材に連結された加振体と、電磁力により前記防振対象部材に対して前記加振体を能動的に振動させる電磁アクチュエータと、前記防振対象部材の振動の大きさを低減するように前記電磁アクチュエータを制御する制御手段と、を備える車両用能動型防振装置であって、前記車両用能動型防振装置は、前記防振対象部材の振動の大きさを検出する振動検出手段をさらに備え、前記制御手段は、路面から伝達される振動に基づいて前記振動検出手段により検出される前記振動の大きさが所定閾値を超えた場合に、前記電磁アクチュエータを制御する制御信号を制限する制限手段と、前記制限手段により前記制御信号を制限している場合であって、前記振動検出手段により検出される前記振動の大きさが所定閾値を下回った場合に、前記電磁アクチュエータを制御する前記制御信号の制限を解除する解除手段と、を備え、前記制限手段により1回当たりに制限する前記制御信号の制限量は、前記制限手段により制限していない状態の前記制御信号に対して予め設定された一部割合であり、前記解除手段により1回当たりに制限解除する前記制御信号の制限解除量は、前記制限手段により制限していない状態の前記制御信号に対して予め設定された一部割合である。
本発明によれば、防振対象部材の振動の大きさが閾値より大きくなった場合に、電磁アクチュエータの制御信号の一部割合を制限している。つまり、防振対象部材の振動の大きな状態が継続した場合に、電磁アクチュエータの制御信号は、直ちに停止するのではなく、段階的に小さくなっていく。従って、車両が悪路を走行し始めた場合に、能動型エンジンマウントにおける加振体自体またはエンジン側取付部材、もしくは能動型ダイナミックダンパにおける加振体自体がストッパに当接することを抑制できる。
また、車両が悪路を走行しているわけではないにも関わらず、何らかの影響により防振対象部材の振動が閾値より大きくなったとしても、直ちに、電磁アクチュエータの制御信号を停止するわけではない。つまり、悪路の誤判定をして振動抑制効果が小さくなるとしても、振動抑制効果を直ちに完全に停止するものではない。従って、悪路の誤判定をしたとしても、十分に振動抑制効果を発揮できる。
さらに、制御信号の制限中に、防振対象部材の振動が閾値より小さくなった場合には、電磁アクチュエータの制御信号の一部割合の制限を解除している。つまり、制御信号の制限中において、防振対象部材の振動の小さな状態が継続した場合に、電磁アクチュエータの制御信号は、直ちに復帰するのではなく、段階的に復帰していく。従って、車両が悪路から良路へ復帰した場合には、振動抑制効果を十分に発揮させることができる。
また、車両が悪路から良路へ復帰していないにも関わらず、何らかの影響により防振対象部材の振動の大きさが閾値より小さくなったとしても、電磁アクチュエータの制御信号を直ちに完全に復帰させるわけではない。従って、この場合にも、能動型エンジンマウントにおける加振体自体またはエンジン側取付部材、もしくは能動型ダイナミックダンパにおける加振体自体がストッパに当接することを抑制できる。
ここで、本発明の能動型防振装置は、特開2006−349028号公報および特開平10−318325号公報に記載の能動型エンジンマウントや、特開2004−044680号公報に記載の能動型ダイナミックダンパに適用できる。能動型エンジンマウントは、車両のエンジンとその支持体との間に介在され、加振体の振動によってエンジンの振動を支持体に伝達することを能動的に抑制する装置である。また、能動型ダイナミックダンパは、車両の各種部材に設けられ、本発明の加振体に相当する質量体(マス)を振動させることで、取付部材の振動を能動的に抑制する装置である。
また、前記制限手段は、路面から伝達される振動に基づいて前記振動検出手段により検出される前記振動の大きさが所定閾値を超えた直後に、前記電磁アクチュエータを制御する制御信号を制限するようにしてもよい。
これにより、車両が悪路を走行し始めた直後から、電磁アクチュエータによる加振体の駆動振幅を小さくすることができる。従って、車両が悪路を走行し始めた直後から、能動型エンジンマウントにおける加振体自体またはエンジン側取付部材、もしくは能動型ダイナミックダンパにおける加振体自体がストッパに当接することを抑制できる。
また、前記解除手段は、前記制限手段により前記制御信号を制限している場合であって、前記振動検出手段により検出される前記振動の大きさが所定閾値を下回った直後に、前記電磁アクチュエータを制御する前記制御信号の制限を解除するようにしてもよい。
これにより、車両が悪路から良路へ復帰した直後から、電磁アクチュエータによる加振体の駆動振幅を復帰させることができる。従って、車両が悪路から良路へ復帰した直後から、振動抑制効果を向上することができる。
(1)能動型防振装置の本体構成
(1.1)概要説明
能動型防振装置は、エンジンを有する自動車に搭載され、エンジンの駆動によって、自動車を構成する防振対象部材が振動することを能動的に抑制する。ここでは、能動型防振装置の本体の例として、能動型エンジンマウントおよび能動型ダイナミックダンパを挙げる。以下に、それぞれについて説明する。
(1.1)概要説明
能動型防振装置は、エンジンを有する自動車に搭載され、エンジンの駆動によって、自動車を構成する防振対象部材が振動することを能動的に抑制する。ここでは、能動型防振装置の本体の例として、能動型エンジンマウントおよび能動型ダイナミックダンパを挙げる。以下に、それぞれについて説明する。
(1.2)能動型エンジンマウント
能動型エンジンマウント10について、図1を参照して説明する。能動型エンジンマウント10は、エンジンをエンジンフレームに対して支持する部材であり、加振体16bを能動的に振動させることにより、エンジンの振動を能動的にエンジンフレームに伝達することを抑制する。
能動型エンジンマウント10について、図1を参照して説明する。能動型エンジンマウント10は、エンジンをエンジンフレームに対して支持する部材であり、加振体16bを能動的に振動させることにより、エンジンの振動を能動的にエンジンフレームに伝達することを抑制する。
能動型エンジンマウント10は、第一取付金具11と、第二取付金具12と、本体ゴム弾性体13と、弾性仕切板14と、ダイヤフラム15と、アクチュエータ16と、加振体用ストッパ17と、取付金具用ストッパ18を備える。
第一取付金具11は、エンジン側に取付けられる部材である。第二取付金具12は、複数の部材により全体として筒状に形成され、防振対象部材としてのエンジンフレームに取付けられる部材である。そして、第一取付金具11と第二取付金具12とは、互いに離隔して対向配置されている。そして、第一取付金具11と第二取付金具12との間には本体ゴム弾性体13が介装されており、第一取付金具11と第二取付金具12とは弾性的に連結されている。
第二取付金具12の内部で本体ゴム弾性体13の図1の下方側には、円盤状のゴム製からなる弾性仕切板14が配置されている。この弾性仕切板14と本体ゴム弾性体13とにより、エンジンからの振動が入力される受圧室14aを形成している。また、第二取付金具12の内部で弾性仕切板14の図1の下方側には、変形容易な薄肉のゴム弾性膜により形成されたダイヤフラム15が配置されている。このダイヤフラム15と弾性仕切板14とにより、容積変化が容易に許容される平衡室14bを形成している。そして、受圧室14a及び平衡室14bには、非圧縮性流体が封入されている。さらに、受圧室14aと平衡室14bとは、オリフィス通路により連通している。
そして、アクチュエータ16は、固定子16aと、固定子16aに対して軸方向(図1の上下方向)に相対移動可能な加振体16bとを備える。固定子16aは、円筒形状に形成されており、第二取付金具12に固定されている。さらに、固定子16aは、コイルが巻回されている。
加振体16bは、アーマチャを構成し、固定子16aの中心孔を軸方向に移動可能に配置されている。さらに、加振体16bは、弾性仕切板14に連結されている。つまり、固定子16aのコイルに周期性の電流を供給することにより、当該電流量に応じた電磁力が発生し、当該電磁力により加振体16bが固定子16aに対して軸方向に振動する。そして、加振体16bの固定子16aに対する軸方向への振動することに伴い、弾性仕切板14が変形する。このように、弾性仕切板14の変形により、受圧室14aの圧力制御が行われる。つまり、弾性仕切板14を能動的に適切に変形させて受圧室14aの圧力を能動的に変化させることで、エンジンの振動がエンジンフレーム側へ伝達されないようにすることができる。
加振体用ストッパ17は、ゴムにより形成され、加振体16bの下面に対向する位置にて、第二取付金具12に固定されている。加振体用ストッパ17は、加振体16bが下方に大きく移動した場合に、加振体16bの移動を規制する。この加振体用ストッパ17は、加振体16bを構成する円筒形状の加振体本体と加振体本体に連結されるロッドとのそれぞれを規制することができる。
取付金具用ストッパ18は、第一取付金具11と第二取付金具12との相対変位を規制する。取付金具用ストッパ18は、第一取付金具11に取り付けられた一対のゴム板18a,18bにより構成される。一対のゴム板18a,18bの軸方向間には、第二取付金具12から延在して形成された当接部12aが挟まれるように配置されている。つまり、第一取付金具11と第二取付金具12とが大きく相対移動した場合には、当接部12aが、一対のゴム板18a,18bに当接する。
(1.3)能動型ダイナミックダンパ
能動型ダイナミックダンパ20について、図2を参照して説明する。能動型ダイナミックダンパ20は、例えばディファレンシャル装置を支持するサブフレームに取り付けられ、質量部材としての加振体23を能動的に振動させることにより、エンジンの駆動によって発生するサブフレームの振動を能動的に抑制することを抑制する。
能動型ダイナミックダンパ20について、図2を参照して説明する。能動型ダイナミックダンパ20は、例えばディファレンシャル装置を支持するサブフレームに取り付けられ、質量部材としての加振体23を能動的に振動させることにより、エンジンの駆動によって発生するサブフレームの振動を能動的に抑制することを抑制する。
能動型ダイナミックダンパ20は、外筒金具21と、コイル部材22と、加振体23と、ゴム弾性体連結部24と、第一ストッパ25と、第二ストッパ26とを備える。外筒金具21は、複数の部材により全体として筒状に形成され、防振対象部材としてのサブフレームに固定される。コイル部材22は、円筒形状に形成されており、外筒金具21の内周面に固定され、コイルが巻回されている。
加振体23は、コイル部材22に対して軸方向に相対的に移動可能に設けられており、ダイナミックダンパの質量部材として機能する。加振体23は、ヨーク23aと、質量付加体23bと、連結ロッド23cとを備える。ヨーク23aは、円筒形状に形成され、コイル部材22の内周面との間に所定の径方向ギャップを有してコイル部材22の中心孔に配置される。質量付加体23bは、厚肉の円盤形状に形成され、ヨーク23aと同軸的に配置される。連結ロッド23cは、ヨーク23aと質量付加体23bとを連結する。
ゴム弾性体連結部24は、中心孔を有する円盤形状に形成され、質量付加体23bの下端面の中心部と外筒金具21の内周面とを弾性的に連結する。第一ストッパ25は、第一ストッパ支持体25aと第一ストッパゴム25bとを備える。第一ストッパ支持体25aは、外筒金具21の内周面から径方向内側に突出して、質量付加体23bの外周側上端面に対して軸方向に離間して対向する位置に設けられている。第一ストッパゴム25bは、第一ストッパ支持体25aの先端下面に固定され、質量付加体23bの外周側上端面に対して軸方向に離間して対向する位置に設けられている。第一ストッパゴム25bは、加振体23が軸方向上側に大きく移動した場合に、加振体23の軸方向上側の移動を規制することができる。
第二ストッパ26は、ゴムにより形成され、質量付加体23bの下端突出部の下面に設けられている。この第二ストッパ26は、外筒金具21に一体的に固定された底板部21aの上面に対して軸方向に離間して対向する位置に設けられている。そして、加振体23が軸方向下方に大きく移動した場合に、第二ストッパ26と外筒金具21の底板部21aとの当接により、加振体23の移動を規制することができる。
そして、コイル部材22のコイルに周期的な電流を供給することにより、ヨーク23aを含む加振体23をコイル部材22に対して振動させることができる。そして、加振体23とゴム弾性体連結部24との共振作用により、防振対象部材であるサブフレームの振動を能動的に抑制することができる。
(2)能動型防振装置の制御装置の構成
上述したように、能動型防振装置の本体として例示した能動型エンジンマウント10において、加振体16bが大きく振動した場合に、加振体16bが加振体用ストッパ17に当接することにより、加振体16bの移動を規制している。また、能動型エンジンマウント10において、第一取付金具11と第二取付金具12との相対変位が大きくなると、取付金具用ストッパ18を構成する一対のゴム板18a,18bと当接部12aとの当接により、第一取付金具11と第二取付金具12との相対移動を規制している。
上述したように、能動型防振装置の本体として例示した能動型エンジンマウント10において、加振体16bが大きく振動した場合に、加振体16bが加振体用ストッパ17に当接することにより、加振体16bの移動を規制している。また、能動型エンジンマウント10において、第一取付金具11と第二取付金具12との相対変位が大きくなると、取付金具用ストッパ18を構成する一対のゴム板18a,18bと当接部12aとの当接により、第一取付金具11と第二取付金具12との相対移動を規制している。
また、能動型ダイナミックダンパ20において、加振体23が大きく振動した場合に、質量付加体23bが第一ストッパゴム25bに当接することにより、加振体23の振動の一方向の移動を規制している。また、加振体23が大きく振動した場合に、第二ストッパ26と外筒金具21の底板部21aとの当接により、加振体23の振動の他方向の移動を規制している。
ところで、自動車が悪路を走行している場合には、路面からの振動の入力によって、能動型エンジンマウント10における加振体16bが第二取付金具12に対して大きく振動し、また第一取付金具11と第二取付金具12とが大きく相対移動するおそれがある。また、自動車が悪路を走行している場合には、能動型ダイナミックダンパ20における加振体23が外筒金具21に対して大きく振動するおそれがある。
そうすると、悪路走行中において、各ストッパ17,18,25,26とその当接部材が当接することにより、振動や異音の発生原因となってしまう。そこで、能動型防振装置の加振体16b,23の加振力を適切に制御することにより、悪路走行中において各ストッパ17,18,25,26とその当接部材が当接することを抑制すると共に、振動抑制効果を十分に発揮することができるようにした。以下に詳細に説明する。
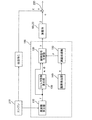
能動型防振装置の制御装置100における機能ブロックについて、図3を参照して説明する。図3は、具体的には、能動型エンジンマウント10における加振体16bの制御を行う制御装置、および、能動型ダイナミックダンパ20における加振体23の制御を行う制御装置の機能ブロックである。
図3に示すように、能動型防振装置の制御装置100は、車両に搭載されたエンジン210により発生する振動が評価点としての車両における防振対象部材220(エンジンフレームまたはサブフレーム)に伝達されることを能動的に抑制するための装置である。この能動型防振装置の制御装置100は、図3に示すように、周波数算出部110と、フィルタ係数算出部120と、制御信号生成部130と、振動検出部140と、悪路処理部150とを備えている。
周波数算出部110は、エンジン210の回転数を検出するための回転検出器(図示せず)から周期性のパルス信号を入力する。そして、周波数算出部110は、入力されたパルス信号に基づき、該パルス信号の周波数fを算出する。この周波数fは、エンジン210により発生する振動の周波数となる。
フィルタ係数算出部120は、制御信号ynの振幅フィルタ係数anおよび位相フィルタ係数φnを算出する。このフィルタ係数算出部120による振幅フィルタ係数anおよび位相フィルタ係数φnは、例えば、適応最小平均自乗フィルタ(Filtered-X LMS)を用いた適応制御により算出することができる。また、振幅フィルタ係数anおよび位相フィルタ係数φnは、適応制御の他に、予め記憶したマップデータを用いて、周波数fに応じた値を選出することもできる。
制御信号生成部130は、周波数算出部110にて算出された周波数fおよびフィルタ係数算出部120にて算出された各フィルタ係数an,φnに基づいて、制御信号ynを生成する。ここで、マップデータを用いて制御信号ynを生成する場合と、適応制御を用いて制御信号ynを生成する場合とについて、それぞれ説明する。
マップデータを用いる場合には、式(1)に従って得られる制御信号ynを生成する。つまり、制御信号ynは、周波数fおよびフィルタ係数an,φnに基づいて算出される周期性の信号となる。ここで、添字のnは、サンプリング数(時間ステップ)を表す添字である。また、出力制限係数μnは、0以上1以下の値であり、後述する悪路処理部150により算出される係数である。出力制限係数μnについては、後述にて詳細に説明する。

制御信号生成部130は、適応制御を用いた場合には、式(2)に従って得られる制御信号ynを生成する。この場合、フィルタ係数算出部120にて、振幅フィルタ係数および位相フィルタ係数は、式(3)(4)に従って更新される。ここで、式(3)の振幅更新式において、前回更新された振幅フィルタ係数anから加減算する第二加減算項は、出力制限係数μnを乗算している。
ここで、加振体16b,23(図1または図2にも示す)は、制御信号生成部130により生成された制御信号ynに応じた制御振動を発生するように駆動される。つまり、制御信号ynに応じた電流が固定子16aのコイルまたはコイル部材22のコイルに供給されることで、発生する電磁力により加振体16b,23が振動する。ここでは、制御信号ynが大きいほど、大きな電流がコイルに供給され、加振体16b,23の振幅を大きくさせるように作用する。
振動検出部140は、自動車の悪路を走行することにより、路面から自動車に伝達される振動を検出する。ここでは、振動検出部140は、防振対象部材としてのエンジンフレームまたはサブフレームに設けられた加速度センサを用いる。つまり、振動検出部140は、防振対象部材の振動を検出する。
悪路処理部150は、振動検出部140により検出された振動の大きさに応じて、制御信号ynの出力制限係数μnを決定する。出力制限係数μnは、上述したように、0以上1以下の値である。この悪路処理部150による詳細な処理について、図4を参照して説明する。
まず、悪路処理部150は、初期状態として出力制限係数μnを0と設定する。そして、振動検出部140により検出された振動enを入力する(ステップS1)。続いて、振動検出部140により検出された振動enが閾値Thを超えているか否かを判定することにより、自動車が悪路を走行中であるか、それとも良路を走行中であるかを判定する(ステップS2)。ここで、振動検出部140により検出された振動の大きさenの絶対値|en|が閾値Thを超えた場合には、悪路フラグをON状態にする。一方、振動検出部140により検出された振動の大きさenの絶対値|en|が閾値Th以下の場合には、悪路フラグをOFF状態にする。
続いて、悪路フラグがON状態か否かを判定する(ステップS3)。そして、悪路フラグがON状態の場合には(ステップS3:Y)、悪路走行中であると判断して、直前の出力制限係数μn−1にΔμを加算した値を次の出力制限係数μnとする(ステップS4)。そして、処理をリターンする。
ここで、出力制限係数μnを1回当たりに大きくする量Δμは、1よりも十分に小さな値に設定している。つまり、悪路フラグのON状態が1回発生したことのみによっては、出力制限係数μnが一気に1になることはない。悪路フラグのON状態が複数回高頻度で発生した場合に、ようやく1になる。そして、出力制限係数μnがΔμずつ大きくなることで、制御信号ynが、Δμの比率に応じた分だけ小さくなる。つまり、悪路走行中と判断されると、制御信号ynが直前の制限割合に対して少しの割合だけ制限される。
一方、ステップS3において、悪路フラグがOFF状態の場合には(ステップS3:N)、良路走行中であると判断して、直前の出力制限係数μn−1からΔμを減算した値を次の出力制限係数μnとする。ただし、出力制限係数μnは、0を超えないようにする。
具体的には、悪路フラグがOFF状態の場合には、直前の出力制限係数μn−1が0であるか否かを判定する(ステップS5)。ここで、直前の出力制限係数μn−1が0の場合とは、制御信号yn−1が制限されていない状態に相当し、直前の出力制限係数μn−1が0でない(0より大きい)場合とは、制御信号yn−1が制限されている状態に相当する。
そして、出力制限係数μn−1が0であれば(ステップS5:Y)、次の出力制限係数μnは、直前の出力制限係数μnと同様に0のままとなる(ステップS6)。そして、処理をリターンする。一方、悪路フラグがOFF状態の場合に、直前の出力制限係数μn−1が0でない場合には(ステップS5:N)、現在制御信号yn−1が制限されている状態であるため、直前の出力制限係数μn−1からΔμを減算した値を次の出力制限係数μnとする(ステップS7)。そして、処理をリターンする。
ここで、出力制限係数μnを1回当たりに大きくする量Δμは、1よりも十分に小さな値に設定している。つまり、悪路フラグのOFF状態が1回発生したことのみによっては、出力制限係数μnが一気に0に戻ることはない。悪路フラグのOFF状態が複数回高頻度で発生した場合に、ようやく0に戻る。そして、出力制限係数μnがΔμずつ小さくなることで、制御信号ynが、Δμの比率に応じた分だけ大きくなる。つまり、悪路走行の後に良路走行中と判断されると、制御信号ynが直前の制限割合に対して少しの割合だけ制限が解除される。
(3)能動型防振装置の制御装置100の動作
次に、上述した制御装置100の動作について、二つの例を挙げて説明する。第一例としては、悪路の判定を連続的で、その後、良路の判定が連続的の場合とし、第二例としては、悪路の判定が不連続の場合とする。
次に、上述した制御装置100の動作について、二つの例を挙げて説明する。第一例としては、悪路の判定を連続的で、その後、良路の判定が連続的の場合とし、第二例としては、悪路の判定が不連続の場合とする。
(3.1)第一例
制御装置100の動作を説明する例として第一例について、図5を参照して説明する。第一例は、上述したように、自動車が激しい悪路を走行している場合を想定しており、悪路の判定が連続的に行われる場合である。そして、その後、良路に復帰して、良路の判定が連続的に行われる場合となる。
制御装置100の動作を説明する例として第一例について、図5を参照して説明する。第一例は、上述したように、自動車が激しい悪路を走行している場合を想定しており、悪路の判定が連続的に行われる場合である。そして、その後、良路に復帰して、良路の判定が連続的に行われる場合となる。
図5(a)には、路面から伝達される振動に基づいて振動検出部140により検出される振動の大きさenの挙動を示す。つまり、時刻t1までは良路を走行しており、時刻t1からt2の間にて悪路を走行し、時刻t2以降において良路に復帰している状態とする。また、閾値Th,−Thは、破線にて示す。つまり、悪路を走行している時刻t1からt2の間、振動の大きさenの絶対値は、閾値Thを超えた状態を継続している。
また、図5(b)には、制御装置100の制御信号のサンプリング信号を示す。図5(b)におけるパルス波の間隔が、サンプリング周期となる。つまり、当該サンプリング信号がON状態となると、制御信号生成部130は、制御信号ynを生成し出力する。つまり、nが、サンプリング信号の度に1ずつ増加する。
図5(c)に示す悪路フラグは、図5(a)の振動の大きさenの絶対値が閾値Thを超えた場合にON状態となり、図5(a)の振動の大きさの絶対値が閾値Th以下の場合にOFF状態となる。そして、悪路フラグは、図5(b)に示すサンプリング信号がON状態になる度に、ON状態かOFF状態かの判定が行われる。従って、時刻t1の直後におけるt11に、悪路フラグはON状態に変更され、時刻t2の直後におけるt21に、悪路フラグはOFF状態に変更される。
図5(c)に示すように、悪路フラグが時刻t11からt21の間連続してON状態となることで、出力制限係数μnは、図5(d)に示すように、時刻t11からt21の間、サンプリング信号のONの度にΔμずつ大きくなっている。つまり、出力制限係数μnの増加量は、時刻t11からt21までのサンプリング信号の回数×Δμとなる。
時刻t21以降は、良路に復帰しているため、悪路フラグは、OFF状態を継続する。従って、図5(d)の時刻t21以降において、出力制限係数μnは、サンプリング信号の度にΔμずつ小さくなっている。そして、時刻t31において、出力制限係数μnは、0に復帰する。
図5(d)に示すような出力制限係数μnが設定された場合において、制御信号ynは、図5(e)に示すような挙動となる。ここで、図5(e)において、説明の容易化のため、振幅フィルタ係数anおよび位相フィルタ係数φnは、一定値の場合として図示している。つまり、振幅フィルタ係数anおよび位相フィルタ係数φnを一定値とした場合には、時刻t11からt21の間において、制御信号ynの絶対値が徐々に小さくなっている。また、時刻t21以降において、制御信号ynの絶対値は徐々に大きくなっている。なお、実際には、フィルタ係数算出部120によって振幅フィルタ係数anおよび位相フィルタ係数φnは、適宜変更するものであるため、実際の制御信号ynの挙動は複雑な変化をする。
(3.2)第二例
次に、制御装置100の動作を説明する例として第二例について、図6を参照して説明する。第二例は、上述したように、自動車が第一例に比べて緩やかな悪路を走行している場合を想定しており、悪路の判定が不連続に行われる場合である。そして、その後、良路に復帰して、良路の判定が連続的に行われる場合となる。
次に、制御装置100の動作を説明する例として第二例について、図6を参照して説明する。第二例は、上述したように、自動車が第一例に比べて緩やかな悪路を走行している場合を想定しており、悪路の判定が不連続に行われる場合である。そして、その後、良路に復帰して、良路の判定が連続的に行われる場合となる。
図6(a)には、路面から伝達される振動に基づいて振動検出部140により検出される振動の大きさenの挙動を示す。つまり、時刻t4までは良路を走行しており、時刻t4からt5の間にて悪路を走行し、時刻t5以降において良路に復帰している状態とする。また、閾値Th,−Thは、破線にて示す。つまり、悪路を走行している時刻t4からt5の間、振動の大きさenの絶対値は、時々、閾値Thを超えた状態となる。
また、図6(b)には、制御装置100の制御信号のサンプリング信号を示す。図6(b)におけるパルス波の間隔が、サンプリング周期となる。つまり、当該サンプリング信号がON状態となると、制御信号生成部130は、制御信号ynを生成し出力する。つまり、nが、サンプリング信号の度に1ずつ増加する。
図6(c)に示す悪路フラグは、図6(a)の振動の大きさenの絶対値が閾値Thを超えた場合にON状態となり、図6(a)の振動の大きさの絶対値が閾値Th以下の場合にOFF状態となる。そして、悪路フラグは、図6(b)に示すサンプリング信号がON状態になる度に、ON状態かOFF状態かの判定が行われる。従って、時刻t4の直後におけるt41(図6(a)の左から一番目の黒丸印)に、悪路フラグはON状態に変更される。その後、図6(a)の左から一番目の白丸印で、悪路フラグはOFF状態に変更され、図6(a)の左から二番目の黒丸印にて再び悪路フラグがON状態になる。そして、時刻t5の直後におけるt51に到達するまでの間、悪路フラグは、ON状態とOFF状態とを数回繰り返す。時刻t51以降は、悪路フラグはOFF状態を継続する。
図6(c)に示すように、時刻t41からt51の間、悪路フラグがON状態になったときに、出力制限係数μnは、図6(d)に示すように、サンプリング信号のONの度にΔμずつ大きくなっている。ただし、時刻t41からt51の間にも、悪路フラグがOFF状態になると、出力制限係数μnは、サンプリング信号の度にΔμずつ小さくなっている。従って、時刻t41からt51の間において、出力制限係数μnは、図5に示す第一例に比べて大きくならない。
時刻t51以降は、良路に復帰しているため、悪路フラグは、OFF状態を継続する。従って、図6(d)の時刻t51以降において、出力制限係数μnは、サンプリング信号の度にΔμずつ小さくなっている。そして、時刻t61において、出力制限係数μnは、0に復帰する。
図6(d)に示すような出力制限係数μnが設定された場合において、制御信号ynは、図6(e)に示すような挙動となる。ここで、図6(e)において、図5(e)と同様に、説明の容易化のため、振幅フィルタ係数anおよび位相フィルタ係数φnは、一定値の場合として図示している。つまり、振幅フィルタ係数anおよび位相フィルタ係数φnを一定値とした場合には、時刻t41からt51の間において、制御信号ynの絶対値が小さくなったり大きくなったり変化している。また、時刻t51以降において、制御信号ynの絶対値は徐々に大きくなっている。
(4)実施形態の効果
上述したように、悪路による振動の大きさenの絶対値が閾値Thより大きくなった場合に、出力制限係数μnを1回当たりに大きくする量Δμは、1よりも十分に小さな値(一部の割合)に設定している。つまり、当該場合に、制御信号ynの一部割合を制限している。つまり、防振対象部材の振動が大きな状態が継続した場合には、制御信号ynは、直ちに停止するのではなく、段階的に小さくなっていく。従って、自動車が悪路を走行し始めた場合に、能動型エンジンマウント10における加振体16bが加振体用ストッパ17に当接することを抑制でき、第一取付金具11が取付金具用ストッパ18に当接することを抑制できる。また、自動車が悪路を走行し始めた場合に、能動型ダイナミックダンパ20における加振体23がストッパ25に当接することを抑制できる。また、上記の場合に、第二ストッパ26が、外筒金具21の底板部21aに当接することを抑制できる。
上述したように、悪路による振動の大きさenの絶対値が閾値Thより大きくなった場合に、出力制限係数μnを1回当たりに大きくする量Δμは、1よりも十分に小さな値(一部の割合)に設定している。つまり、当該場合に、制御信号ynの一部割合を制限している。つまり、防振対象部材の振動が大きな状態が継続した場合には、制御信号ynは、直ちに停止するのではなく、段階的に小さくなっていく。従って、自動車が悪路を走行し始めた場合に、能動型エンジンマウント10における加振体16bが加振体用ストッパ17に当接することを抑制でき、第一取付金具11が取付金具用ストッパ18に当接することを抑制できる。また、自動車が悪路を走行し始めた場合に、能動型ダイナミックダンパ20における加振体23がストッパ25に当接することを抑制できる。また、上記の場合に、第二ストッパ26が、外筒金具21の底板部21aに当接することを抑制できる。
また、自動車が悪路を走行しているわけではないにも関わらず、何らかの影響により防振対象部材の振動が閾値より大きくなったとしても、直ちに、制御信号ynを停止するわけではない。つまり、悪路の誤判定をして振動抑制効果が小さくなるとしても、振動抑制効果を直ちに完全に停止するものではない。従って、悪路の誤判定をしたとしても、十分に振動抑制効果を発揮できる。
また、振動検出部140により検出される振動の大きさenの絶対値が閾値Thを超えた直後に、制御信号ynを制限している。これにより、自動車が悪路を走行し始めた直後から、加振体16b,23の駆動振幅を小さくすることができる。従って、自動車が悪路を走行し始めた直後から、能動型エンジンマウント10における加振体16bまたは第一取付金具11、もしくは能動型ダイナミックダンパ20における加振体23または外筒金具21がストッパ17,18,25,26に当接することを抑制できる。
また、制御信号ynの制限中に、悪路による振動の大きさenの絶対値が閾値Th以下になった場合に、出力制限係数μnの制限を解除している。出力制限係数μnを1回当たりに小さくする量Δμは、1よりも十分に小さな値(一部の割合)に設定している。つまり、制御信号ynの制限中において、防振対象部材の振動の小さな状態が継続した場合に、制御信号ynは、直ちに復帰するのではなく、段階的に復帰していく。従って、自動車が悪路から良路へ復帰した場合には、振動抑制効果を十分に発揮させることができる。
また、自動車が悪路から良路へ復帰していないにも関わらず、何らかの影響により防振対象部材の振動の大きさenの絶対値が閾値Thより小さくなったとしても、制御信号ynを直ちに完全に復帰させるわけではない。従って、この場合にも、能動型エンジンマウント10における加振体16bまたは第一取付金具11、もしくは能動型ダイナミックダンパ20における加振体23または外筒金具21がストッパ17,18,25,26に当接することを抑制できる。
また、制御信号ynを制限している場合であって、振動検出部140により検出される振動の大きさenの絶対値が閾値Thを下回った直後に、制御信号ynの制限を解除するようにしている。これにより、自動車が悪路から良路へ復帰した直後から、加振体16b,23の駆動振幅を復帰させることができる。従って、自動車が悪路から良路へ復帰した直後から、振動抑制効果を向上することができる。
また、第二例に示すように、悪路走行中であっても、サンプリング信号の周期と悪路による振動の周期が異なることに起因して、あるサンプリング信号がONのときには振動の大きさenの絶対値が閾値Thを超えているとしても、他のサンプリング信号がONのときには振動の大きさenの絶対値が閾値Th以下となる場合がある。このような場合に、振動の大きさenの絶対値が閾値Thを超えた直後に出力制限係数μnを大きくし、かつ、振動の大きさenの絶対値が閾値Th以下となった直後に出力制限係数μnを小さくするとしても、出力制限係数μnの1回当たりの変化量Δμは、1よりも十分に小さいため、ほとんど影響ない。むしろ、振動の大きさenに応じて適切な振動抑制効果を発揮できると共に、振動の大きさenの変化に俊敏に対応することができる。
10:能動型エンジンマウント、 11:第一取付金具
12:第二取付金具、 12a:当接部、 13:本体ゴム弾性体
14:弾性仕切板、 14a:受圧室、 14b:平衡室、 15:ダイヤフラム
16:アクチュエータ、 16a:固定子、 16b:加振体
17:加振体用ストッパ、 18:取付金具用ストッパ、 18a,18b:ゴム板
20:能動型ダイナミックダンパ、 21:外筒金具、 22:コイル部材
23:加振体、 23a:ヨーク、 23b:質量付加体、 23c:連結ロッド
24:ゴム弾性体連結部
25:第一ストッパ、 25a:第一ストッパ支持体、 25b:第一ストッパゴム
26:第二ストッパ
100:制御装置、 220:防振対象部材
12:第二取付金具、 12a:当接部、 13:本体ゴム弾性体
14:弾性仕切板、 14a:受圧室、 14b:平衡室、 15:ダイヤフラム
16:アクチュエータ、 16a:固定子、 16b:加振体
17:加振体用ストッパ、 18:取付金具用ストッパ、 18a,18b:ゴム板
20:能動型ダイナミックダンパ、 21:外筒金具、 22:コイル部材
23:加振体、 23a:ヨーク、 23b:質量付加体、 23c:連結ロッド
24:ゴム弾性体連結部
25:第一ストッパ、 25a:第一ストッパ支持体、 25b:第一ストッパゴム
26:第二ストッパ
100:制御装置、 220:防振対象部材
Claims (3)
- 車両に設けられた防振対象部材と、
前記防振対象部材に対して相対的に振動可能となるように、弾性体を介して前記防振対象部材に連結された加振体と、
電磁力により前記防振対象部材に対して前記加振体を能動的に振動させる電磁アクチュエータと、
前記防振対象部材の振動の大きさを低減するように前記電磁アクチュエータを制御する制御手段と、
を備える車両用能動型防振装置であって、
前記車両用能動型防振装置は、前記防振対象部材の振動の大きさを検出する振動検出手段をさらに備え、
前記制御手段は、
路面から伝達される振動に基づいて前記振動検出手段により検出される前記振動の大きさが所定閾値を超えた場合に、前記電磁アクチュエータを制御する制御信号を制限する制限手段と、
前記制限手段により前記制御信号を制限している場合であって、前記振動検出手段により検出される前記振動の大きさが所定閾値を下回った場合に、前記電磁アクチュエータを制御する前記制御信号の制限を解除する解除手段と、
を備え、
前記制限手段により1回当たりに制限する前記制御信号の制限量は、前記制限手段により制限していない状態の前記制御信号に対して予め設定された一部割合であり、
前記解除手段により1回当たりに制限解除する前記制御信号の制限解除量は、前記制限手段により制限していない状態の前記制御信号に対して予め設定された一部割合である車両用能動型防振装置。 - 請求項1において、
前記制限手段は、路面から伝達される振動に基づいて前記振動検出手段により検出される前記振動の大きさが所定閾値を超えた直後に、前記電磁アクチュエータを制御する制御信号を制限する車両用能動型防振装置。 - 請求項1または2において、
前記解除手段は、前記制限手段により前記制御信号を制限している場合であって、前記振動検出手段により検出される前記振動の大きさが所定閾値を下回った直後に、前記電磁アクチュエータを制御する前記制御信号の制限を解除する車両用能動型防振装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010292095A JP2012140979A (ja) | 2010-12-28 | 2010-12-28 | 車両用能動型防振装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010292095A JP2012140979A (ja) | 2010-12-28 | 2010-12-28 | 車両用能動型防振装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012140979A true JP2012140979A (ja) | 2012-07-26 |
Family
ID=46677444
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010292095A Pending JP2012140979A (ja) | 2010-12-28 | 2010-12-28 | 車両用能動型防振装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012140979A (ja) |
-
2010
- 2010-12-28 JP JP2010292095A patent/JP2012140979A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5792948A (en) | Active vibration control apparatus for vehicle | |
| JP5736036B2 (ja) | 車両の振動低減システム | |
| JPH11223238A (ja) | 能動型振動制御装置 | |
| JPH06109072A (ja) | パワーユニットの防振支持装置 | |
| JP3978908B2 (ja) | 防振支持装置 | |
| JP2006207794A (ja) | 能動型防振装置 | |
| JPH08177960A (ja) | 防振支持装置 | |
| JP2012140979A (ja) | 車両用能動型防振装置 | |
| JP6961953B2 (ja) | 振動低減装置 | |
| JP3593866B2 (ja) | 能動型騒音振動制御装置 | |
| JP3402120B2 (ja) | 能動型振動制御装置 | |
| JP5141420B2 (ja) | 駆動部支持構造及び駆動支持系の制御方法 | |
| JP3747619B2 (ja) | 能動型振動制御装置 | |
| JP3598888B2 (ja) | 車両用能動型振動制御装置 | |
| JP3624694B2 (ja) | 能動型騒音振動制御装置 | |
| JP3997610B2 (ja) | 車両用能動型振動制御装置 | |
| JPH09317816A (ja) | 能動型振動制御装置 | |
| JPH09319380A (ja) | 能動型騒音振動制御装置 | |
| JP4379125B2 (ja) | サスペンション装置 | |
| JP3419231B2 (ja) | 能動型振動制御装置 | |
| JP3336946B2 (ja) | 防振支持装置 | |
| JPH11173370A (ja) | 防振支持装置 | |
| JP3804275B2 (ja) | 能動型騒音振動制御装置 | |
| JPH04302729A (ja) | パワーユニット用マウント | |
| JPH05126200A (ja) | パワーユニツト用マウント |