JP2012142899A - アンテナ装置 - Google Patents
アンテナ装置 Download PDFInfo
- Publication number
- JP2012142899A JP2012142899A JP2011001283A JP2011001283A JP2012142899A JP 2012142899 A JP2012142899 A JP 2012142899A JP 2011001283 A JP2011001283 A JP 2011001283A JP 2011001283 A JP2011001283 A JP 2011001283A JP 2012142899 A JP2012142899 A JP 2012142899A
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- directional
- antenna device
- control unit
- signal input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Variable-Direction Aerials And Aerial Arrays (AREA)
- Radio Transmission System (AREA)
Abstract
【課題】装置自体の姿勢状態に影響を受けることなく、所定方向からの対象物の接近を精度良く認識し、あるいは認識させることが可能なアンテナ装置を提供する。
【解決手段】アンテナ装置100は、複数の指向性アンテナ103と、これら複数の指向性アンテナを支持するアンテナ支持部102と、アンテナ支持部102の姿勢状態と移動方向に基づいて、複数の指向性アンテナ103のうちの少なくとも一つから入力又は出力される信号の利得を制御する演算制御部105を有する。
【選択図】図1
【解決手段】アンテナ装置100は、複数の指向性アンテナ103と、これら複数の指向性アンテナを支持するアンテナ支持部102と、アンテナ支持部102の姿勢状態と移動方向に基づいて、複数の指向性アンテナ103のうちの少なくとも一つから入力又は出力される信号の利得を制御する演算制御部105を有する。
【選択図】図1
Description
本発明は、複数の指向性アンテナを有するアンテナ装置に関する。
本技術分野の背景技術として特開2009−81769号公報(特許文献1)がある。この公報には、「[課題]装置の設置方向が変化した場合にも特定の通信対象との間で安定した通信が可能な低コストで消費電力が小さい機器を提供すること。[解決手段]2つの指向性アンテナ4および5の中から駆動する指向性アンテナを選択し切り替える機能を有する制御部8を備え、制御部8は3軸加速度センサ11と、3軸磁気センサ12と、指向性アンテナ4および5の各々の指向性データと通信対象の方向とを記憶している記憶部13とを備え、3軸加速度センサ11と3軸磁気センサ12とから検出されるデータにより本無線装置の通信対象に対する方向の変化を計算し、記憶部13の指向性データを参照し、指向性アンテナ4および5の中から通信対象との通信に適した指向性を有する1つの指向性アンテナを常に選択し駆動する。」と記載されている。
また、特開2010-152675号公報(特許文献2)がある。この公報には「[課題]より少ない情報のみを用いて車両の状況に応じて危険を特定することのできる危険車両判定装置およびそれを用いた運転支援システムを提供する。[解決手段]危険車両判定装置は、それぞれが異なる指向性を有する複数のアンテナと、自車両および周囲の車両の加速度を取得する加速度取得手段と、周囲の車両から送信される電波の前記複数のアンテナの各々における受信電力を取得する受信電力取得手段と、各アンテナにおける受信電力を、各アンテナにあらかじめ定められた重み付け係数を用いて平均する平均受信電力産出手段と、算出した平均受信電力が上位の所定数の車両について、自車両と当該車両との相対加速度が所定の閾値以上である場合に、当該車両を危険車両であると判断する危険判定手段と、を備える。」と記載されている。
歩行者と自転車や自動車の接触や衝突、あるいは、クレーンや無人搬送車と作業者の接触事故、シャッターや自動ドアに人が挟まれる、といった人と移動体、あるいは静止した危険物との接触や衝突は後を絶たない。これは視覚や聴覚が衰え、周囲の状況判断がしにくくなる高齢者に限らず、歩行者や運転者、作業者といった人が周囲の注意を払うべき存在に気が付いていないことから起こるものである。自動車では進行方向を視野に入れたカメラ画像からの危険検知が行われており、無人搬送車などでは、電波や赤外線、超音波利用した、より単純な近接センサが使われている。また、対象物があらかじめ特定できる場合などは、電波送受信機を用いて、たがいに信号を発信し、その受信強度により接近を検知する衝突予防用近接センサもある。
しかし、その装置がどのような姿勢で保持されたとしても、使用者の進行方向に対して、任意の方向の送信または受信指向性アンテナの利得を制御できるアンテナは存在しなかった。さらに使用者の死角となる使用者の進行方向後方から接近する対象物など、速さと方向の相対的移動速度に応じて衝突危険度を判断し、警告する衝突あるいは接近警告の安価で携帯可能なアンテナ装置は存在しなかった。
本発明は、上記の点に鑑みてなされたものであり、その目的とするところは、装置自体の姿勢状態に影響を受けることなく、所定方向からの対象物の接近を精度良く認識し、あるいは、認識させることが可能なアンテナ装置を提供することにある。
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。本願は、上記課題を解決する手段を複数含んでいるが、その一例をあげるならば、複数の指向性アンテナを有するアンテナ装置であって、該アンテナ装置の周囲の空間を複数の領域に分割して、該分割した複数の領域に対して各指向性アンテナの指向領域がそれぞれ割り当てられるように前記複数の指向性アンテナを支持するアンテナ支持部と、該アンテナ支持部の姿勢状態と移動方向に基づいて前記複数の指向性アンテナのうちの少なくとも一つから入力又は出力される信号の利得を制御する演算制御部とを有することを特徴としている。
本発明によれば、アンテナ装置の姿勢状態にかかわらず、アンテナ装置の移動方向に対して予め設定された注意方向から入力又は出力される信号の利得を制御することができる。したがって、例えば、注意方向から入力される信号の利得を上げる制御を行うことによって、注意方向から対象物が接近してきた場合にその接近を早期に認識でき、衝突の回避動作や警告等を適切に行うことができる。また、例えば、注意方向以外の他の方向から入力される信号の利得を下げる制御を行うことによって、周囲の関係ない非対象物の移動を検出し難くすることができ、注意方向からの接近として誤検出するのを防ぐことができる。
そして、例えば、注意方向に向かって出力される信号の利得を上げる制御を行うことによって、注意方向に存在する対象物に対して本装置の存在を早期に認識させることができる。また、例えば注意方向以外の他の方向に向かって出力される信号の利得を下げる制御を行うことによって、周囲の関係ない非対象物に対して、本装置が注意すべきものであると誤って認識させてしまうのを防ぐことができる。
以下、本発明の実施例について図面を用いて説明する。
[実施例1]
図1は、本実施例のアンテナ装置の構成例を示す概略図である。
図1は、本実施例のアンテナ装置の構成例を示す概略図である。
アンテナ装置100は、図1に示すように、アンテナ部101と、アンテナ部101に対して位置および姿勢が固定された3軸加速度センサ104と、3軸加速度センサ104から得られる加速度データにより、装置自身の静止と移動方向を算出し、各指向性アンテナ103の送信または受信利得を制御する演算制御部105を有している。
アンテナ部101は、複数の指向性アンテナ103と、各指向性アンテナ103が固定された状態で支持される多面体(アンテナ支持部)102によって構成されている。指向性アンテナ103は、それぞれが指向性を持っており、送受信する方向が定まっている。
各指向性アンテナ103は、アンテナ装置101の周囲の空間を複数の領域に分割して、その分割した複数の領域に対して各指向性アンテナ103の指向領域がそれぞれ割り当てられるように多面体102に支持されている。本実施例では、多面体102は、6面体によって構成されており、多面体102の各面にそれぞれ指向性アンテナ103が配置されている。
各指向性アンテナ103は、多面体102の各面から放射状に指向領域が広がるように取り付けられており、指向領域の組み合わせにより、複数の指向性アンテナ103全体でアンテナ装置101の前後左右上下の全方向を網羅し、アンテナ部101としてその全周にわたって送受信可能となっている。尚、図1で符号106は、個々の指向性アンテナ103の指向領域を模式的に示す補助線である。
各指向性アンテナ103は、送信あるいは受信利得を個別に演算制御部105から制御可能であり、アンテナ部101として任意の方向の発信あるいは受信利得を制御でき、発信方向の限定、受信方向の識別も可能である。
3軸加速度センサ104は、直交する3軸方向について加速度データを取得することが可能であり、演算制御部105において、この加速度データから重力方向を検出すると同時に、重力方向の加速度成分を除いて、積分していくことで自身の姿勢状態および移動方向を算出することができる。3軸加速度センサ104は、アンテナ部101に対してその位置および姿勢が固定されているので、3軸加速度センサ104によって得られた移動方向はそのままアンテナ装置100の移動方向となる。
演算制御部105は、アンテナ部101の複数の指向性アンテナ103のうち、いずれの指向性アンテナ103が移動方向を向いているかを特定し、必要に応じて重力方向のデータ(姿勢状態)も加味して、他の指向性アンテナ103が移動方向に対してどの方向に向いているかを特定する。そして、この結果をもとに、各指向性受信アンテナ103の利得を制御することで、移動方向に対して任意の方向の利得の強弱を制御するアンテナ装置100を得る。
図2は、演算制御部の内部機能を説明する機能ブロック図である。図2には、アンテナ装置100のうち、3軸加速度センサ104と、指向性アンテナ103の1チャンネル分に関係する演算制御部105の内部構成が示され、他のアンテナに対応する部分は省略している。
演算制御部105は、演算部201、送信利得制御部202、受信利得制御部206を有している。演算部201は、3軸加速度センサ104から得られた加速度データを、アンテナ装置100の重力方向に対する姿勢状態、移動方向、および移動速度のデータに変換する。
そして、これらのデータに基づいて、複数の指向性アンテナ103の中から、移動方向に対して予め設定された角度を有する注意方向、つまり送信利得を上げるべき方向を向いている指向性アンテナ103を特定する。そして、その特定された指向性アンテナ103に対応する送信利得制御部202を制御して、演算制御部105から送受信アンテナ103に出力される送信信号205の出力を制御する。
例えば、注意方向が移動方向と一致しており、移動方向を向いている指向性アンテナ103の出力信号の強度を上げる場合には、より大きな信号増幅を促す送信利得制御信号203を演算部201から送信利得制御部202に送る。送信利得制御部202は、演算部201から送信利得制御信号203を受け取ると、演算部201から送信利得制御部202に供給される送信原信号204を増幅してその出力を上げ、送信信号205として指向性アンテナ103へ送る。
また、例えば、移動方向以外の送信信号205の出力を下げたい方向を向いている指向性アンテナ103に対しては、信号増幅率を下げる送信利得制御信号203を送信利得制御部202に送る。送信利得制御部202は、演算部201から送信利得制御信号203を受け取ると、演算部201から送信利得制御部202に供給される送信原信号204の信号増幅率をより下げて、送信信号205として指向性アンテナ103へ送る。
一方、入力信号の場合も、前記した姿勢状態、移動方向、および移動速度のデータに変換する。そして、これらのデータから、注意方向、つまり受信利得を上げるべき方向を向いている指向性アンテナ103を特定する。そして、その指向性アンテナ103に対応する受信利得制御部206を制御して、アンテナ103で受信した受信原信号208を受信利得制御部206で増幅し、増幅済み受信信号209として演算部201に送る。
例えば、注意方向が移動方向とは反対の後方向に設定されており、後方向を向いている指向性アンテナ103の受信信号の強度を上げる場合には、より大きな信号増幅を促す受信利得制御信号207を演算部201から受信利得制御部206に送る。受信利得制御部206は、演算部201から受信利得制御信号207を受け取ると、指向性アンテナ103から受信利得制御部206に入力される受信原信号208を増幅してその出力を上げ、受信信号209として演算部201へ送る。
また、例えば、注意方向以外の方向を向いている他の指向性アンテナ103の受信信号の強度を下げる場合には、信号増幅率を下げる受信利得制御信号207を受信利得制御部206に送る。受信利得制御部206は、演算部201から受信利得制御信号207を受け取ると、指向性アンテナ103から受信利得制御部206に供給される受信原信号208の信号増幅率をより下げて、受信信号209として演算部201へ送る。
演算部201では、姿勢状態、移動方向、移動速度のデータと合わせて危険度の判定をし、警告手段などの他装置に信号210を出力したり、あるいは他装置から入力した信号210に従って、利得制御の比率を変えたり。速度姿勢データの補正を行ったりする。
上記したアンテナ装置100によれば、多面体102の姿勢状態と移動方向に基づいて複数の指向性アンテナ103のうちの少なくとも一つから入力又は出力される信号の利得を制御するので、自己の姿勢状態にかかわらず、自己の移動方向に対して予め設定された注意方向から入力又は出力される信号の利得を制御することができる。
したがって、例えば、注意方向から入力される信号の利得を上げる制御を行うことによって、注意方向からの対象物の接近等を早期に認識でき、衝突の回避動作や警告等を適切に行うことができる。また、例えば、注意方向以外の他の方向から入力される信号の利得を下げる制御を行うことによって、周囲の関係ない物体の移動を検出し難くすることができ、注意方向からの接近として誤って検出するのを防ぐことができる。
そして、例えば、注意方向に向かって出力される信号の利得を上げる制御を行うことによって、注意方向に存在する対象物等に対して本装置100の存在を早期に認識させることができる。また、例えば注意方向以外の他の方向に向かって出力される信号の利得を下げる制御を行うことによって、周囲の関係ない物体に対して、本装置100が注意すべきものであると誤って認識させてしまうのを防ぐことができる。
[実施例2]
次に、本発明のアンテナ装置を接近信号受信装置として適用した場合の実施例について説明する。
次に、本発明のアンテナ装置を接近信号受信装置として適用した場合の実施例について説明する。
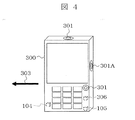
図3は、実施例2におけるアンテナ装置の使用例を示す図、図4は、図3に示すアンテナ装置の構成を説明する図である。なお、実施例1と同様の構成要素については同一の符号を付することでその詳細な説明を省略する。
本実施例では、指向性アンテナが受信専用の受信アンテナ301である点で、図1におけるアンテナ装置100の構成と異なっている。本実施例におけるアンテナ装置は、携帯電話300に内蔵されて一体に組み込まれている。携帯電話300は、通話等の電話としての一般的な機能に加えて、例えば自動車310などの対象物の接近を警告する警告機能を備えている。
携帯電話300は、図4に示すように、所定の厚みを有する平板状の六面体からなる筐体(アンテナ支持部)を有しており、表裏左右上下の各面に受信アンテナ301が配置されている。各受信アンテナ301は、携帯電話300の筐体の各面から放射状に指向領域が広がるように取り付けられており、これらの指向領域の組み合わせによって、携帯電話300の前後左右上下の全方向から受信可能となっている。
演算制御部105は、携帯電話300に内蔵された3軸加速度センサ104から得られる加速度データを、携帯電話300の姿勢状態、移動方向、および移動速度のデータに変換する。そして、携帯電話300がどのような姿勢で保持されていても、保持している使用者302の移動方向303に対してどの方向から電波が来たのかを判別し、移動方向に対して予め設定された注意方向を向いている受信アンテナ301の受信利得を制御する。
携帯電話300は、図3に示すように、自動車310に搭載された電波発信装置305から発信される接近信号を受信し、自動車310の近接により、受信アンテナ301の受信信号の信号強度が予め設定された強度以上になった場合に、使用者302の移動方向303に対して、どの方向から接近しているかを判別する。
そして、その判別結果である、どの方向から自動車310が近付いているかについての情報を、警告手段306を介して、使用者302に警告する。警告手段306は、音声や表示、振動等、公知の警告動作を行い、使用者302に警告を行うことができる。
本実施例においては、使用者302の注意が行き届きにくい方向、つまり、使用者302の後方が注意方向として設定されており、後方に向かう受信アンテナ301の受信利得を上げる制御が行われている。
したがって、例えば、携帯電話300が図4に示す状態で保持されている場合には、複数の受信アンテナ301のうち、後方に指向領域を持つ携帯電話300の右側面に設けられた受信アンテナ301Aの受信利得を上げている。これにより、使用者302にとって気が付きにくい、後方からの自動車310の接近をより早く検知し、使用者302により早い段階で警告を発することができる。
上記した携帯電話300によれば、鞄の中、シャツのポケットなど、どのような姿勢状態で携行しても、その姿勢状態と自身の移動方向を判別することができ、携帯電話300を携行している使用者302に対して、対象物310の方向を特定した適切な警告を出すことができる。
[実施例3]
本実施例では、アンテナ装置を接近信号受発信装置として適用した場合について説明する。
本実施例では、アンテナ装置を接近信号受発信装置として適用した場合について説明する。
図5は、実施例3におけるアンテナ装置の使用例を示す図、図6は、図5に示すアンテナ装置の構成を説明する図である。なお、実施例1、2と同様の構成要素には同一の符号を付することでその詳細な説明を省略する。
本実施例におけるアンテナ装置は、実施例2と同様に、携帯電話400に一体に組み込まれている。そして、接近信号を受信する接近信号受信機能だけでなく、自らが接近信号を発信する接近信号発信機能も備えている点、および、指向性アンテナが、送信専用と受信専用で別個に設けられている点で実施例2と異なっている。
送信アンテナ401は、受信アンテナ301の隣に並ぶように、携帯電話400の筐体の表裏左右上下の各面に配置されている。各送信アンテナ401は、携帯電話400の筐体の各面から放射状に指向領域が広がるように取り付けられており、これらの指向領域の組み合わせによって、携帯電話400の前後左右上下の全方向に送信可能となっている。
演算制御部105は、携帯電話400に内蔵された3軸加速度センサ104から得られる加速度データを、携帯電話400の姿勢状態、移動方向、および移動速度のデータに変換する。そして、携帯電話400がどのような姿勢で保持されていても、保持している使用者302Aの移動方向303に対して、任意の方向に向いている指向性アンテナ301の送信利得を制御する。なお、接近信号受信機能については、実施例2と同様であるので、その詳細な説明は省略する。
演算制御部105は、例えば図5に示すように、自転車402に乗った使用者302Aが接近中であることを、前方の歩行者302Bに知らせるために、携帯電話300から周囲に接近信号を発信させる制御を行う。
このように、使用者302Aが携行する携帯電話400から接近信号を発信することで、自転車402や軽車両など、それ自体に装置を付けるのが負担になる場合に、装置を別個に用意するという負担を軽減し、装備し忘れるという可能性を低減することができる。
図5に示すように、使用者302Aが自転車402に乗った時などは身につけている携帯電話400はどのような姿勢になるか分からないが、前記したように携帯電話400がどのような姿勢になっても、3軸加速度センサ104によってその姿勢状態と移動方向を取得することができる。
接近信号の発信は、他者に対して接近を知らせることが目的なので、特に接触の可能性が高い移動方向303と同じ方向、及び重力方向403の検出から導き出した水平面404(側方を含む)の発信アンテナ401の送信利得を上げ、それ以外の方角に比べて、他者が遠くからでも受信できるようにしている。さらに、移動速度に比例して送信利得を上げるように制御することで、対処可能時間が短く、止まりにくい高速時には、より遠くまで、使用者302Aの接近を知らせることができる。
上記した携帯電話400によれば、衝突可能性の高い自身の前方及び斜め前方方向への発信電波強度を上げ、かかる方向に存在する他者への警告とすることができる。さらに、自身の移動速度に応じて、発信強度や受信利得を制御することで、より効果的に衝突あるいは接近警告を出すことができる。
[実施例4]
本実施例では、アンテナ装置を接近信号発信装置として適用した場合について説明する。
本実施例では、アンテナ装置を接近信号発信装置として適用した場合について説明する。
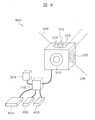
図7は、実施例4におけるアンテナ装置の使用例を示す図である。なお、実施例1〜3と同様の構成要素には同一の符号を付することでその詳細な説明を省略する。
本実施例におけるアンテナ装置501は、接近信号発信装置として、クレーンのフックブロック503に取り付けられている。そして、周辺の作業者502は、接近信号受信装置となる携帯電話300を携帯している。
クレーン作業においては、吊り下げた荷物504が作業者502の頭上を通過する可能性もあるため、警告は作業者502の移動方向とはあまり関係なく、頭上を含めて行う必要がある。そのため、作業者502が携帯する携帯電話300に設けられた複数の受信アンテナ301の利得はいずれも同じに設定されている。
一方で、クレーンで移動させている荷物504やフックブロック503は、場合によっては、作業者502よりも高い位置にあるため、特に移動方向303と重力方向403を含む領域505においては、衝突や落下の危険を知らせる必要がある。
そこで、アンテナ装置501では、移動方向303と重力方向403を含む方向の送信アンテナ401の発信利得を上げる。作業者502の携帯電話300は、電波を受信した方向を判別して、作業者502にとってどの方向から荷物504やフックブロック503が近づいているかを警告する。
同様の使い方は、自動ドアやシャッターといった対象物に挟まれる可能性のあるものについても使用可能である。この場合、閉まりはするが対象物の位置そのものは変わらないため、発信側では閉まる動作に入った時に対象物に設けられた発信装置から、無指向で近傍に向けて電波を発信するだけで良い。前記と同様に受信側では、電波を受信した方向を判別し、作業者に警告する。
[実施例5]
本実施例では、アンテナ装置の移動方向を演算する上で重要となる速度=0の初期状態を、内蔵の加速度センサ以外により検知する方法の例について説明する。
本実施例では、アンテナ装置の移動方向を演算する上で重要となる速度=0の初期状態を、内蔵の加速度センサ以外により検知する方法の例について説明する。
図8は、実施例5におけるアンテナ装置の構成を説明する図である。尚、実施例1〜4に記載した構成と同様の構成要素については同一の符号を付することでその詳細な説明を省略する。
本実施例におけるアンテナ装置600は、自身の移動方向は加速度を積算することによって得ているが、そのためには初期状態として移動速度が0、つまり静止状態から演算を始める必要がある。
理論的には、物体は等速運動状態である時、加速度は0であるが、真空や宇宙空間でもない実際の生活環境においては、自転車や電車、自動車などに乗ったとしても、路面の凹凸による振動や空気抵抗、摩擦等よる加減速は存在するので重力以外の加速度が働かない等速移動状態というのは、存在しないと言ってよい。
従って、机など移動しないものの上に、アンテナ装置600が置かれた場合のように、重力加速度以外の加速度が0の状態がある程度持続すれば、静止状態であり、移動速度が0と判断して良いことが多く、移動方向演算のための初期値合わせ、つまりリセットが行える。
しかし、この方法では、通常の生活でアンテナ装置600を身に着けていた場合など、リセットの回数は多くないと考えられる。リセットが少ないことは演算誤差が増えていくことになり、移動方向、速度の判定も正確さを欠いてしまう。これを避け、リセットする回数を増やすため、アンテナ装置600には、3軸加速度センサ104とは別個に、アンテナ装置600が静止しているか否かを判断するための静止判断信号を入力する判断信号入力手段として、GPS装置601と、速度信号入力部602と、クレードル接続スイッチ603が設けられている。
GPS装置601は、自身の位置情報を一定周期で計算している。同じ位置情報が連続して得られており、その間の重力加速度以外の加速度が0であれば、移動していないことになる。位置情報が変わっていた場合も、加速度と時間から演算で得られる移動量との比較をすることで、精度を上げる方向に演算上の速度データを修正可能である。演算制御装置105は、GPS装置601から所定期間同じ位置にいることを示す信号の入力を受けた場合に、3軸加速度センサによる演算データを直接補正して、移動速度を0としてリセットする。
速度信号入力部602は、自動車など速度信号を出力する機能を持った乗物に使用者が搭乗した時に、その速度信号を入力するものである。自動車が静止していれば速度も0である。したがって、演算制御部105は、速度信号入力部602から速度が0の信号の入力を受けた場合に、3軸加速度センサによる演算データを直接補正して、移動速度を0としてリセットする。
クレードル接続スイッチ603は、アンテナ装置600が、充電用のクレードルなどの移動しない機器に接続されたことを検知するものである。アンテナ装置600がクレードルに接続されていれば速度も0である。したがって、演算制御部105は、クレードル接続スイッチ603からクレードル接続信号の入力を受けた場合に、3軸加速度センサによる演算データを直接補正して、移動速度を0としてリセットする。
アンテナ装置600は、GPS装置601、入力部602、スイッチ603の少なくとも一つからの情報に基づいて移動速度を0にリセットできるので、リセットする回数を増やすことができ、演算誤差の増加を防ぎ、移動方向、速度の判定等を高精度に行うことができる。
なお、上記した実施例では、アンテナ装置600が静止しているか否かを判断するための静止判断信号を入力する判断信号入力手段として、GPS装置601、入力部602、スイッチ603を例に説明したが、これに限定されるものではなく、他のものであってもよい。
[実施例6]
本実施例では、アンテナ部の他の構成例について説明する。
本実施例では、アンテナ部の他の構成例について説明する。
図9は、アンテナ部の他の構成例を示す図である。なお、上述の実施例1〜5と同様の構成要素には同一の符号を付することでその詳細な説明を省略する。
図9(a)に示すアンテナ部101は、四面体701を有しており、四面体701の各面にそれぞれ指向性アンテナ103が設けられている。平面で構成する多面体のうち最も面数が少ないのは四面体である。したがって、四面体701の各面に指向性アンテナ103を配置することで、方向の分解能は低いが、最も少ないコストで全周をカバーするアンテナ部101を構成することができる。
図9(b)に示すアンテナ部101は、十二面体702を有しており、十二面体702の各面にそれぞれ指向性アンテナ103が設けられている。人が方向として直感的に理解しやすいのは、前後左右上下の6方向であり、あまりに細かく方向を指示されると理解しにくい。対象物の接近を警告する場合にも、この6方向で示すのが最低限の分解能として望ましく、この六方向に平面上での斜め方向を加える程度が直感的に理解できる限界に近い。この条件を満たすためには、六面体以上の分解能のアンテナである必要があるが、指向性アンテナの数を増すことは、処理の手間やコストを増やすことになる。したがって、六面体から十二面体程度までが最もコストパフォーマンスに優れている。なお、図9の十二面体アンテナの例では、見やすさを考慮して指向性アンテナ103の一部の表記を省略している。
上記した各実施例では、指向性アンテナ103を支持するアンテナ支持部が多面体によって構成されている場合を例に説明したが、多面体に限定されるものではなく、アンテナ部101としてその全周にわたって送信又は受信可能となるように、複数の指向性アンテナ103を支持できるものであればよい。
本発明は、上述の各実施例の内容に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々の変更が可能である。例えば、上述の各実施例では、3軸加速度センサ104からの加速度データに基づいて重力方向を判定し、アンテナ装置の姿勢状態を判断しているが、アンテナ装置にジャイロセンサを設けて、ジャイロセンサからの検出信号に基づいてアンテナ装置の姿勢状態を判断する構成としてもよい。
100 アンテナ装置
101 アンテナ部
102 多面体(アンテナ支持部)
103 指向性アンテナ
104 3軸加速度センサ
105 演算制御部
106 指向領域を示す補助線
201 演算部
202 送信利得制御部
206 受信利得制御部
600 アンテナ装置
601 GPS装置
602 速度信号入力部
603 クレードル接続スイッチ
701 四面体(アンテナ支持部)
702 十二面体(アンテナ支持部)
101 アンテナ部
102 多面体(アンテナ支持部)
103 指向性アンテナ
104 3軸加速度センサ
105 演算制御部
106 指向領域を示す補助線
201 演算部
202 送信利得制御部
206 受信利得制御部
600 アンテナ装置
601 GPS装置
602 速度信号入力部
603 クレードル接続スイッチ
701 四面体(アンテナ支持部)
702 十二面体(アンテナ支持部)
Claims (8)
- 複数の指向性アンテナを有するアンテナ装置であって、
該アンテナ装置の周囲の空間を複数の領域に分割して、該分割した複数の領域に対して各指向性アンテナの指向領域がそれぞれ割り当てられるように前記複数の指向性アンテナを支持するアンテナ支持部と、
該アンテナ支持部の姿勢状態と移動方向に基づいて、前記複数の指向性アンテナのうちの少なくとも一つから入力又は出力される信号の利得を制御する演算制御部と、
を有することを特徴とするアンテナ装置。 - 前記演算制御部は、前記複数の指向性アンテナの中から前記アンテナ支持部の移動方向に向いている指向性アンテナを特定し、該特定された指向性アンテナから入力又は出力される信号の利得を上げる制御を行うことを特徴とする請求項1に記載のアンテナ装置。
- 前記演算制御部は、前記複数の指向性アンテナの中から前記アンテナ支持部の移動方向に対して予め設定された角度を有する方向に向いている指向性アンテナを特定し、該特定された指向性アンテナから入力又は出力される信号の利得を上げる制御を行うことを特徴とする請求項1に記載のアンテナ装置。
- 前記演算制御部は、前記特定された指向性アンテナ以外の他の指向性アンテナから入力又は出力される信号の利得を下げる制御を行うことを特徴とする請求項2又は3に記載のアンテナ装置。
- 前記特定された指向性アンテナから信号の入力を受けた場合に、警告動作を行う警告手段を有することを特徴とする請求項2又は3に記載のアンテナ装置。
- 前記アンテナ支持部の3軸方向の加速度を検出する3軸加速度センサを有し、
前記演算制御部は、前記3軸加速度センサの加速度データに基づいて前記アンテナ支持部の姿勢状態、移動方向、移動速度を演算することを特徴とする請求項1から請求項5のいずれか一項に記載のアンテナ装置。 - 前記アンテナ支持部が静止しているか否かを判断するための静止判断信号を入力する判断信号入力手段を有し、
前記演算制御部は、該判断信号入力手段によって入力した静止判断信号に基づいて前記アンテナ支持部が静止していると判断した場合に、前記3軸加速度センサの加速度データに基づき演算される移動速度を0にリセットすることを特徴とする請求項6に記載のアンテナ装置。 - 前記アンテナ支持部は、4面以上の多面体を有し、該多面体の各面に前記複数の指向性アンテナがそれぞれ設けられていることを特徴とする請求項1から請求項7のいずれか一項に記載のアンテナ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011001283A JP2012142899A (ja) | 2011-01-06 | 2011-01-06 | アンテナ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011001283A JP2012142899A (ja) | 2011-01-06 | 2011-01-06 | アンテナ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012142899A true JP2012142899A (ja) | 2012-07-26 |
Family
ID=46678706
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011001283A Pending JP2012142899A (ja) | 2011-01-06 | 2011-01-06 | アンテナ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012142899A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013085058A (ja) * | 2011-10-07 | 2013-05-09 | Yupiteru Corp | 電子機器、及び電波受信モジュール |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004064741A (ja) * | 2002-06-05 | 2004-02-26 | Fujitsu Ltd | 移動端末用適応アンテナ装置 |
| JP2004328330A (ja) * | 2003-04-24 | 2004-11-18 | Denso Corp | アンテナ装置、統合アンテナ装置および車載統合アンテナ装置 |
| JP2005191639A (ja) * | 2003-12-24 | 2005-07-14 | Denso Corp | 歩行者検知装置 |
| JP2005286918A (ja) * | 2004-03-30 | 2005-10-13 | Toyota Central Res & Dev Lab Inc | 指向性制御装置 |
| JP2006333069A (ja) * | 2005-05-26 | 2006-12-07 | Hitachi Ltd | 移動体用アンテナ制御装置およびアンテナ制御方法 |
| JP2010200229A (ja) * | 2009-02-27 | 2010-09-09 | Casio Computer Co Ltd | 携帯用電子機器 |
-
2011
- 2011-01-06 JP JP2011001283A patent/JP2012142899A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004064741A (ja) * | 2002-06-05 | 2004-02-26 | Fujitsu Ltd | 移動端末用適応アンテナ装置 |
| JP2004328330A (ja) * | 2003-04-24 | 2004-11-18 | Denso Corp | アンテナ装置、統合アンテナ装置および車載統合アンテナ装置 |
| JP2005191639A (ja) * | 2003-12-24 | 2005-07-14 | Denso Corp | 歩行者検知装置 |
| JP2005286918A (ja) * | 2004-03-30 | 2005-10-13 | Toyota Central Res & Dev Lab Inc | 指向性制御装置 |
| JP2006333069A (ja) * | 2005-05-26 | 2006-12-07 | Hitachi Ltd | 移動体用アンテナ制御装置およびアンテナ制御方法 |
| JP2010200229A (ja) * | 2009-02-27 | 2010-09-09 | Casio Computer Co Ltd | 携帯用電子機器 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013085058A (ja) * | 2011-10-07 | 2013-05-09 | Yupiteru Corp | 電子機器、及び電波受信モジュール |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8731530B1 (en) | In-vehicle driver cell phone detector | |
| JP6233213B2 (ja) | 携帯装置及び位置検出システム | |
| CN110027550A (zh) | 用于远程停车辅助的移动装置网络共享 | |
| EP2905184A1 (en) | Collision detection apparatus | |
| US10471934B2 (en) | Boundary detection system utilizing wireless signals | |
| KR20190101909A (ko) | 위험물 감지를 위한 차량용 레이더 시스템 | |
| JP2012048537A (ja) | 車両接近報知システム | |
| CN102529962A (zh) | 移动体防碰撞装置和移动体 | |
| US9888357B2 (en) | Methods and systems for identifying the user of a smartphone inside a moving vehicle and automatic detection and calculation of the time and location when and where a vehicle has been parked | |
| JP2019032806A (ja) | 制御装置及び制御方法 | |
| US10634782B2 (en) | Extravisual obstacle detecting system | |
| JP2013009027A (ja) | 歩行者端末装置、コンピュータプログラム、及び、無線通信方法 | |
| JP2020173524A (ja) | 監視システム | |
| US11016190B2 (en) | Apparatus, system and method for perimeter crossover dtection about a vehicle | |
| KR20120119420A (ko) | 지능형 운동체 제어 장치 및 방법 | |
| JP2012142899A (ja) | アンテナ装置 | |
| CN121252844A (zh) | 宏观-微观姿态检测 | |
| JP2017161430A (ja) | 他車両の位置検出装置 | |
| JP2014002647A (ja) | 運転支援システム、運転支援装置および携帯端末 | |
| KR101472624B1 (ko) | 휴대용 전자 장치, 휴대용 전자 장치의 차량 정보 처리 방법, 및 기록 매체 | |
| JP2015098393A (ja) | ブーム付き車両用安全装置及びブーム付き車両の安全運用方法 | |
| JP2006220547A (ja) | ナビゲーション装置およびプログラム | |
| JP2017138806A (ja) | 車両転倒報知システムおよび車載器 | |
| WO2022239709A1 (ja) | 観察装置 | |
| JP2018201164A (ja) | 携帯端末接続システム、携帯端末判定装置、携帯端末判定方法、および携帯端末判定プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130919 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140520 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150210 |