KR20190101909A - 위험물 감지를 위한 차량용 레이더 시스템 - Google Patents
위험물 감지를 위한 차량용 레이더 시스템 Download PDFInfo
- Publication number
- KR20190101909A KR20190101909A KR1020190021399A KR20190021399A KR20190101909A KR 20190101909 A KR20190101909 A KR 20190101909A KR 1020190021399 A KR1020190021399 A KR 1020190021399A KR 20190021399 A KR20190021399 A KR 20190021399A KR 20190101909 A KR20190101909 A KR 20190101909A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- user terminal
- radar
- black box
- warning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000004891 communication Methods 0.000 claims abstract description 23
- 238000000034 method Methods 0.000 claims description 17
- 238000004364 calculation method Methods 0.000 claims description 10
- 238000001514 detection method Methods 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000001228 spectrum Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 5
- 238000009434 installation Methods 0.000 description 4
- 230000007613 environmental effect Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 238000010183 spectrum analysis Methods 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/003—Transmission of data between radar, sonar or lidar systems and remote stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
- B60R11/0211—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof for record carriers apparatus, e.g. video recorders, tape players or CD players
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
- B60R11/0258—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof for navigation systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B60R16/0239—Electronic boxes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0841—Registering performance data
- G07C5/085—Registering performance data using electronic data carriers
- G07C5/0866—Registering performance data using electronic data carriers the electronic data carrier being a digital video recorder in combination with video camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B60W2420/52—
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93272—Sensor installation details in the back of the vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Human Computer Interaction (AREA)
- Mathematical Physics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
- Time Recorders, Dirve Recorders, Access Control (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
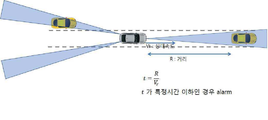
도 2는 도 1의 변형 실시예로서 차량 후방 설치 레이더 센서의 광각 탐지 각도를 보여주는 개략도이다.
도 3은 본 발명의 일 실시예에 따른 차량용 레이더 시스템에서 레이더 센서의 주파수를 도시한 예시적인 도면이다.
도 4는 본 발명의 일 실시예에 따른 차량용 레이더 시스템에서 추출된 주파수 피크를 도시한 예시적인 도면이다.
Claims (11)
- 차량에 장착되는 레이더 센서;
상기 레이더 센서의 송신 전자파와 수신 전자파를 분석하는 연산 모듈; 및
상기 연산 모듈의 연산 결과를 차량 내 사용자 단말기와 근거리 통신으로 소통하는 통신 모듈을 구비하고,
상기 연산 모듈은 상기 레이더 센서의 전자파 송수신 스펙트럼을 분석하여 차량과 차량 전방에 출현한 개체와의 충돌에 이르기까지의 잔여 시간을 실시간 산출하고, 충돌에 이르기까지의 잔류시간에 대해 소정의 임계 시간이 설정되어 상기 임계 시간에 도달하면 상기 사용자 단말기를 통해 경고를 발하게 하는 것을 특징으로 하는 차량용 레이더 시스템. - 제1항에 있어서,
상기 사용자 단말기는 스마트폰, 태블릿 컴퓨터, 블랙박스 또는 네비게이션을 포함하고, 상기 통신 모듈은 블루투스, NFC, 또는 지그비를 포함한 근거리 통신으로 소통하고, 상기 경고는 경고음 발성 또는 경고등 점멸 또는 경고 화면 표시를 포함하는 것을 특징으로 하는 차량용 레이더 시스템. - 제1항에 있어서,
상기 차량용 레이더 시스템은 블랙박스에 합체되어 블랙박스 일체형인 것을 특징으로 하는 차량용 레이더 시스템. - 제3항에 있어서,
상기 통신 모듈은 레이더 감지 결과, 상기 차량의 충돌 위험 시점에 관한 임계 시간 정보를 상기 블랙박스의 영상모듈에 송신하고,
상기 블랙박스에 의해 위험상황을 녹화하는 것을 특징으로 하는 차량용 레이더 시스템. - 제4항에 있어서,
상기 통신 모듈은 상기 사용자 단말기가 블랙박스일 경우, 상기 블랙박스와 근거리 통신으로 소통하여, 차량의 충돌 위험 시점에 관한 임계 시간 정보를 상기 블랙박스의 영상모듈에 송신하고,
상기 블랙박스에 의해 위험상황이 녹화되도록 하는 것을 특징으로 하는 차량용 레이더 시스템. - 제1항에 있어서,
상기 연산 모듈은 GPS 모듈을 더 포함하고,
상기 통신 모듈은 근거리 통신을 통해 네비게이션 장치와 연동되고,
상기 레이더 센서에서 감지한 개체의 위치는 상기 네비게이션 장치가 표시하는 지도 위에 중첩시켜 표시되도록 하는 것을 특징으로 하는 차량용 레이더 시스템. - 제1항에 있어서,
상기 사용자 단말기는 상기 사용자 단말기에 설치된 앱을 통해 경고 신호를 발하는 것을 특징으로 하는 차량용 레이더 시스템. - 제6항에 있어서,
상기 통신 모듈은 상기 레이더 센서에 의해 감지된 임계 시간 도달에 따른 경고 신호에 대한 정보를 상기 네비게이션 장치의 앱으로 전송하고,
상기 경고 신호는 상기 네비게이션 장치의 앱을 통해 발하게 되는 것인, 차량용 레이더 시스템. - 제8항에 있어서,
상기 사용자 단말기는 상기 네비게이션 장치의 앱과 정보를 주고받아 상기 네비게이션 장치로부터 지도 정보를 받아 전방 도로의 곡률 계산을 통해 전방 물체가 자차 선에 존재하는지를 판단하는 것을 특징으로 하는 차량용 레이더 시스템. - 제1항에 있어서,
상기 레이더 센서는 상기 차량 전방 외에 차량의 후방에 더 설치되고,
상기 레이더 센서는 상기 차량의 차선 변경시 상기 차량의 후방 또는 측방의 개체를 감지하고,
상기 연산 모듈은 소정의 임계 시간 내에 상기 후방 또는 측방의 개체와의 추돌이 가능하다고 판단되는 경우, 상기 사용자 단말기에서 경고 신호를 발하게 하는 것을 특징으로 하는 차량용 레이더 시스템. - 제10항에 있어서,
경고 방법은 경고음 발생으로 이루어지거나 상기 사용자 단말기의 앱을 통한 음성 또는 화상 경고 또는 상기 네비게이션과 연동하여 네비게이션의 지도 화면상에서의 경고신호로 이루어지고, 상기 사용자 단말기의 화상 또는 네비게이션 지도 화면상에서 상기 차량에 대한 측방 또는 후방 개체와의 거리 또는 속도를 표시해주는 것을 특징으로 하는 차량용 레이더 시스템.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020518804A JP2021520525A (ja) | 2018-02-23 | 2019-02-25 | 危険物を感知するための車両用レーダシステム |
| PCT/KR2019/002288 WO2019164372A1 (ko) | 2018-02-23 | 2019-02-25 | 위험물 감지를 위한 차량용 레이더 시스템 |
| CN201980004792.0A CN111183367A (zh) | 2018-02-23 | 2019-02-25 | 用于检测危险物品的车辆雷达系统 |
| EP19758003.8A EP3757612A4 (en) | 2018-02-23 | 2019-02-25 | VEHICLE RADAR SYSTEM FOR DETECTION OF DANGEROUS GOODS |
| US16/830,786 US20200225343A1 (en) | 2018-02-23 | 2020-03-26 | Vehicle radar system for detecting dangerous goods |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20180021661 | 2018-02-23 | ||
| KR1020180021661 | 2018-02-23 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20190101909A true KR20190101909A (ko) | 2019-09-02 |
Family
ID=67951464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190021399A Ceased KR20190101909A (ko) | 2018-02-23 | 2019-02-22 | 위험물 감지를 위한 차량용 레이더 시스템 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20200225343A1 (ko) |
| EP (1) | EP3757612A4 (ko) |
| JP (1) | JP2021520525A (ko) |
| KR (1) | KR20190101909A (ko) |
| CN (1) | CN111183367A (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200046136A (ko) * | 2018-10-10 | 2020-05-07 | 현대자동차주식회사 | 근거리 끼어들기 차량 판단 장치 및 그의 판단 방법과 그를 이용하는 차량 |
| KR20210041770A (ko) | 2019-10-08 | 2021-04-16 | 주식회사 제이씨레이다 | 스마트 모빌리티 감지 레이다 |
| KR20210061597A (ko) * | 2019-11-20 | 2021-05-28 | 삼성전자주식회사 | 참조 데이터를 이용한 레이더 데이터 처리 장치 및 방법 |
| US12517220B2 (en) | 2022-07-14 | 2026-01-06 | Hyundai Mobis Co., Ltd. | Signal simulator and signal simulation method |
| US12529761B2 (en) | 2022-07-14 | 2026-01-20 | Hyundai Mobis Co., Ltd. | Signal simulator and signal simulation method |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113632152A (zh) * | 2019-03-15 | 2021-11-09 | 本田技研工业株式会社 | 车辆通信装置和程序 |
| JP7379462B2 (ja) * | 2019-03-15 | 2023-11-14 | 本田技研工業株式会社 | 車両用コミュニケーション装置及びプログラム |
| DE112020005125T5 (de) * | 2019-11-22 | 2022-07-21 | Hyundai Motor Company | System zum aufzeichnen von ereignisdaten eines autonomen fahrzeugs |
| WO2021210088A1 (ja) * | 2020-04-15 | 2021-10-21 | 日本電信電話株式会社 | 収集システム、収集装置、その方法、およびプログラム |
| US11491976B2 (en) * | 2020-04-21 | 2022-11-08 | Baidu Usa Llc | Collision warning system for safety operators of autonomous vehicles |
| US12354420B2 (en) * | 2020-08-14 | 2025-07-08 | Kennith Burks | Systems and methods for an automobile status recorder |
| US11807257B2 (en) * | 2021-06-07 | 2023-11-07 | Toyota Connected North America, Inc. | Sensing interactions with unpermitted components within a vehicle |
| CN113208438B (zh) * | 2021-06-24 | 2022-09-06 | 合肥美菱物联科技有限公司 | 一种茶吧机防止水壶倾倒的预警系统及方法 |
| CN113903142B (zh) * | 2021-09-24 | 2022-12-06 | 广州智伴人工智能科技有限公司 | 一种用于智能陪伴机器人的儿童户外状态监测方法和系统 |
| CN114137527A (zh) * | 2021-11-30 | 2022-03-04 | 中汽创智科技有限公司 | 一种车辆预警方法、装置、设备及存储介质 |
| JP7487728B2 (ja) * | 2021-12-10 | 2024-05-21 | トヨタ自動車株式会社 | 監視装置、監視用コンピュータプログラム及び監視方法 |
| CN114995640A (zh) * | 2022-05-23 | 2022-09-02 | 浙江运动家体育发展有限公司 | 一种基于智慧步道的运动管理方法及系统 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7421321B2 (en) * | 1995-06-07 | 2008-09-02 | Automotive Technologies International, Inc. | System for obtaining vehicular information |
| US6592230B2 (en) * | 1997-10-16 | 2003-07-15 | Holland Hitch Company | Truck rearview mirror assembly having a display for displaying trailer coupling status information |
| US7796081B2 (en) * | 1997-10-22 | 2010-09-14 | Intelligent Technologies International, Inc. | Combined imaging and distance monitoring for vehicular applications |
| JP3658519B2 (ja) * | 1999-06-28 | 2005-06-08 | 株式会社日立製作所 | 自動車の制御システムおよび自動車の制御装置 |
| DE102009057191A1 (de) * | 2009-12-05 | 2011-06-09 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum eindeutigen Bestimmen einer Entfernung und/oder einer relativen Geschwindigkeit eines Objektes, Fahrerassistenzeinrichtung und Kraftfahrzeug |
| CN201936364U (zh) * | 2011-01-17 | 2011-08-17 | 杨静慧 | 具测速及影像记录的行车记录器 |
| CN102289952B (zh) * | 2011-07-15 | 2014-11-26 | 黄克 | 一种基于卫星导航系统的车辆防撞方法及导航系统和用途 |
| KR101300534B1 (ko) * | 2012-02-29 | 2013-09-02 | 주경희 | 무선레이더를 이용한 차간거리표시 및 차량추돌위험경보방법 및 이를 이용한 장치 |
| JP5939170B2 (ja) * | 2013-01-17 | 2016-06-22 | 株式会社デンソー | 物体接近報知システム |
| JP6355234B2 (ja) * | 2013-04-09 | 2018-07-11 | 株式会社ユピテル | 画像記録装置、画像記録システム、及びプログラム |
| CN104369670B (zh) * | 2013-08-15 | 2017-05-24 | 深圳市赛格导航科技股份有限公司 | 一种车速控制方法和系统 |
| KR101484618B1 (ko) * | 2014-03-24 | 2015-01-21 | (주)디지탈엣지 | 레이더 단말 관리 시스템 및 관리 방법 |
| KR20160091040A (ko) * | 2015-01-23 | 2016-08-02 | 엘지전자 주식회사 | 차량 및 차량의 제어 방법 |
| JP6056069B2 (ja) * | 2015-09-17 | 2017-01-11 | 株式会社ユピテル | ドライブレコーダ本体及び機器 |
| JP6211043B2 (ja) * | 2015-11-05 | 2017-10-11 | 三菱電機株式会社 | 車両用衝突防止装置 |
| JP2017107475A (ja) * | 2015-12-11 | 2017-06-15 | セルスター工業株式会社 | 車載システム及びドライブレコーダー |
| JP6132327B1 (ja) * | 2016-09-12 | 2017-05-24 | Kenpal株式会社 | 運行管理支援システム、運行管理方法、サーバ装置、及びプログラム |
-
2019
- 2019-02-22 KR KR1020190021399A patent/KR20190101909A/ko not_active Ceased
- 2019-02-25 JP JP2020518804A patent/JP2021520525A/ja active Pending
- 2019-02-25 CN CN201980004792.0A patent/CN111183367A/zh active Pending
- 2019-02-25 EP EP19758003.8A patent/EP3757612A4/en not_active Withdrawn
-
2020
- 2020-03-26 US US16/830,786 patent/US20200225343A1/en not_active Abandoned
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200046136A (ko) * | 2018-10-10 | 2020-05-07 | 현대자동차주식회사 | 근거리 끼어들기 차량 판단 장치 및 그의 판단 방법과 그를 이용하는 차량 |
| KR20210041770A (ko) | 2019-10-08 | 2021-04-16 | 주식회사 제이씨레이다 | 스마트 모빌리티 감지 레이다 |
| KR20210061597A (ko) * | 2019-11-20 | 2021-05-28 | 삼성전자주식회사 | 참조 데이터를 이용한 레이더 데이터 처리 장치 및 방법 |
| US12517220B2 (en) | 2022-07-14 | 2026-01-06 | Hyundai Mobis Co., Ltd. | Signal simulator and signal simulation method |
| US12529761B2 (en) | 2022-07-14 | 2026-01-20 | Hyundai Mobis Co., Ltd. | Signal simulator and signal simulation method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111183367A (zh) | 2020-05-19 |
| JP2021520525A (ja) | 2021-08-19 |
| EP3757612A4 (en) | 2021-11-17 |
| US20200225343A1 (en) | 2020-07-16 |
| EP3757612A1 (en) | 2020-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20190101909A (ko) | 위험물 감지를 위한 차량용 레이더 시스템 | |
| KR102797059B1 (ko) | 차량 및 그 제어 방법 | |
| JP2017535008A (ja) | 道路交通利用者の移動モデルを形成するための方法及び装置 | |
| US9959687B2 (en) | Driver behavior monitoring | |
| US9959765B2 (en) | System and method for providing alert to a vehicle or an advanced driver assist system based on vehicle dynamics input | |
| US8669857B2 (en) | Hand-held device integration for automobile safety | |
| US6856896B2 (en) | Vehicle recognition support system | |
| US8436746B2 (en) | Driver notification system, device, and associated method | |
| JP2017527939A (ja) | 交通区域を監視する方法及び装置 | |
| US10192443B2 (en) | Collision avoidance system and collision avoidance method | |
| US11164451B2 (en) | Vehicular communication system | |
| CN109895757A (zh) | 用于监测车辆制动器的方法和装置 | |
| CN108307295A (zh) | 用于弱势道路使用者避免事故的方法和装置 | |
| JP2018513504A (ja) | 自動車に対する近接認識システム | |
| CN103909926A (zh) | 车辆侧向防碰撞方法、设备以及系统 | |
| WO2019060891A1 (en) | VISUALIZATION OF DATA WITH INCREASED REALITY | |
| CN105336216A (zh) | 无信号交叉路口防碰撞预警方法及终端 | |
| US20170096105A1 (en) | Method for providing an alert to a driver and an alert system | |
| EP2279889B1 (en) | Method and system for shoulder departure assistance in an automotive vehicle | |
| EP3703032B1 (en) | Collaborative safety for occluded objects | |
| WO2019164372A1 (ko) | 위험물 감지를 위한 차량용 레이더 시스템 | |
| JP2006072725A (ja) | 車載装置 | |
| JP2022100852A (ja) | 注意喚起装置及び注意喚起方法 | |
| JP2022101272A (ja) | 注意喚起装置及び注意喚起方法 | |
| JP2017010130A (ja) | 歩行者用衝突警告システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190222 |
|
| PG1501 | Laying open of application | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210426 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20190222 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230218 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230630 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20230218 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |