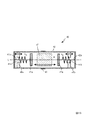
まず、図1、図2を参照して本発明の実施例1に係る疑似力覚発生装置の概念を説明する。図1は本実施例の疑似力覚発生装置10の概念を示す平面図である。図2は本実施例の疑似力覚発生装置10の概念を示す斜視図である。図1、図2に示すように本実施例の疑似力覚発生装置10は並進機構11と回転機構12とベース(把持部)13とを備える。並進機構11の機構としては特許文献1に記載の加速度発生装置を用いることができる。特許文献1の各実施形態のうち第4の実施形態、第11の実施形態に記載された加速度発生装置について以下に詳細に説明する。
〔特許文献1の第4実施形態〕
本形態は、特許文献1における第3の実施の形態の変形例であり、バネの少なくとも一方のバネ定数を変化させる機構(バネ定数可変部)を設け、バネ定数を変化させることで可動鉄芯の共振周波数を制御する形態である。本形態では、バネの巻き数Nを変化させることによりバネ定数を変化させる構成を採る。以下では、特許文献1の第3の実施の形態との相違点を中心に説明を行う。
<構成>
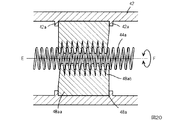
図19は、特許文献1の第4の実施の形態における加速度発生装置40の構成を示した断面図である。
図19に例示する通り、本形態の加速度発生装置40は、円盤状の鉄芯41a、41bと、円筒の両開口部を塞いだ形状であり絶縁材料で構成されたフレーム42と、バネ44a、44bと、銅線等の導線の側面を絶縁体で覆ったコイル46と、強磁性体である可動鉄芯(プランジャー)47と、バネ44a、44bのバネ定数をそれぞれ変更可能な巻き数調整機構48a、48bを有し、可動鉄芯47を直線Eと平行に並進運動させる。
巻き数調整機構48a、48b以外の構成は第3の実施の形態と同じである。すなわち、鉄芯41a、41b、フレーム42、バネ44a、44b、コイル46、可動鉄芯47及び直線Eは、それぞれ、第3の実施の形態の鉄芯31a、31b、フレーム32、バネ34a、34b、コイル36、可動鉄芯37及び直線Dに相当する。以下では、巻き数調整機構48a、48bの構成について説明する。
図20、図21は、巻き数調整機構48aの構成例を説明するための部分断面図である。なお、以下では、巻き数調整機構48aの構成例のみを示すが、巻き数調整機構48bも同様な構成となる。また、図20、図21の例はバネ44a、44bとしてコイルバネを用いた場合に適用可能な例である。以下では、バネ44a、44bがコイルバネであるとして説明を行う。
図20は、巻き数調整機構48aの構成例の一つを示している。この例の巻き数調整機構48aは、円筒状のベース部48aaの内壁にらせん状のねじ込み溝48abを形成してなる。このねじ込み溝48abは、ベース部48aaの一方の開放端から他方の開放端までらせん状に連なる溝であり、このねじ込み溝48abによってバネ44aが保持される。これにより、バネ44aの任意の位置がフレーム42に対して固定される。また、フレーム42の内壁には、直線Eを軸として巻き数調整機構48aを回転可能に保持する保持部42aが形成されている。この例の保持部42aは、フレーム42の内壁面をリング状に周回する2本のリングであり、この2本のリングの間に若干の隙間をおいて巻き数調整機構48aが保持される。これにより、巻き数調整機構48aは、直線Eを軸としてF方向に回転可能であるが、直線E方向には移動しない。このような構成の巻き数調整機構48aを、直線Eを軸としてF方向に回転させた場合、そのねじ込み溝48abに保持されているバネ44aが直線Eと平行に送り出される。なお、バネ44aが送り出される向きは、ねじ込み溝48abのらせん方向、バネ44aのつる巻き方向及び巻き数調整機構48aの回転方向によって定まる。ここで、バネ44aのうち弾性体として機能するのは、巻き数調整機構48aの鉄芯41a側の外部に位置する部分のみである。従って、巻き数調整機構48aが送り出すバネ44aの方向によってバネ44aのうち弾性体として機能する部分の長さ(実質的な巻き数N)を調整することができ、これにより、実質的なバネ定数を調整することができる。
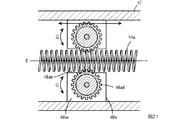
図21は、巻き数調整機構48aの他の構成例を示している。この例の巻き数調整機構48aは、フレーム42の内壁に固着されるベース部48acと、このベース部48acに回転可能に取り付けられた送り駆動歯車48adとを有している。送り駆動歯車48adは、直線Eと垂直な回転軸を中心としたG方向の回転及び回転固定が可能な歯車であり、その歯48aeによってバネ44aを保持する。これにより、バネ44aの任意の位置がフレーム42に対して固定される。このような送り駆動歯車48adを回転させることによって、バネ44aを直線Eと平行に送り出すことができ、バネ44aのうち弾性体として機能する部分(実質的な巻き数N)を調整することができる。これにより、実質的なバネ定数を調整することができる。
なお、バネの実質的な巻き数Nを減少させるとバネ定数は増加する。一般にバネ定数kは以下の等式で表されるからである。
(k:ばね定数(N/mm)、P:荷重(N)、δ:変位(mm)、G:ばね材料の剛性率(N/mm2=Mpa)、d:ばねの線径(mm)、N:巻き数、D:平均コイル径(mm))
<本形態の特徴>
本形態では、バネ44a、44bの実質的なバネ定数を調整可能であるため、可動鉄芯47の並進運動の加速度も調整できる。そして、この巻き数調整機構48a、48bをモータ等によって駆動可能な構成とすれば、加速度発生装置40の駆動前のみではなく、駆動中も可動鉄芯47の並進運動の加速度を調整することが可能となる。その結果、擬似的な知覚が最もよく発生させるための加速度の調整が容易になる。
なお、ここでは、バネ44a、44b双方の実質的なバネ定数を調整可能としたが、バネ44a、44bの何れか一方のみの実質的なバネ定数を調整可能としてもよい。
〔特許文献1の第11実施形態〕
次に、特許文献1の第11の実施の形態について説明する。
本形態は、回転動力を一周期中で加速度の変位が非対称の並進運動に変換し、この並進運動によって擬似的な力覚を発生させる。そして、このような機構の加速度発生装置を2つ用い、それらを鏡面対称に配置して擬似力覚発生装置を構成する。
<加速度発生装置の構成>
図22は、特許文献1の第11の実施の形態における並進型の加速度発生装置201の構成を例示した平面図であり、図23Aは、図22のW0方向からみた正面図であり、図23Bは図22における23B−23B部分断面図である。なお、図23Bのベース部210は断面図ではなく側面図である。
以下、これらの図を用いて本形態の加速度発生装置201の構成を説明する。
図22、23に例示するように、本形態の加速度発生装置201は、ベース部210と、ベース部210に内蔵されたモータ220と、モータ220の回転動力が伝えられる回転入力軸221と、回転入力軸221に固定された回転部材230(クランク)と、回転入力軸221以外の回転部材230上の部分に、当該回転入力軸221と平行な第1回転軸233によって回転可能に接合された第1リンク機構250と、第1回転軸233以外の第1リンク機構250上の部分に、当該第1回転軸233と平行な第2回転軸251によって回転可能に接合された第2リンク機構270と、第2回転軸251以外の第2リンク機構270上の部分が、当該第2回転軸251と平行な第3回転軸283aによって回転可能に接合され、移動範囲が一方向(W6方向)のスライド運動に限定されたスライド機構282と、回転入力軸221に対する相対位置が固定されたスライド支点ベース部241と、回転入力軸221と平行なスライド支点回転軸243によってスライド支点ベース部241に回転可能に接合され、第1リンク機構250を長手方向(W7方向)へスライド可能に保持するスライド支点機構242と、回転入力軸221に固着され、その回転に伴って回転する歯車291とを主な構成部品とする。
この例のベース部210は、1つの段差によって低段部211と高段部212とが構成された階段状の中空体であり、その底面にはねじ孔が設けられた板状のタブ213、214が構成されている。このベース部210の高段部212の端部には、モータ220の回転動力を伝える回転入力軸221を通すための貫通孔212aが設けられる。また、ベース部210の貫通孔212aが設けられている反対側の面(図23の下方向)にも貫通孔(図示しない)が設けられている。モータ220は、その回転動力を伝える回転入力軸221がこれらの貫通孔を通じ、上下面外部に突き出した状態でベース部210の高段部212内部に固定配置される。
貫通孔212aからベース部210の上面外部に突き出した回転入力軸221には、円盤状の回転部材230の中心部が固着される。また、ベース部210の下面外部に突き出した回転入力軸221には、円盤状の歯車291が固着される。これにより、回転部材230及び歯車291は、回転入力軸221の回転動力によりW1方向に回転運動する。
回転部材230上の辺縁部232には、柱状の第1リンク機構250の端部が第1回転軸233(ビス等)によってW2方向に回転可能に取り付けられる。これにより、第1リンク機構250は、回転入力軸221以外の回転部材230上の部分に、当該回転入力軸221と平行な第1回転軸233によって回転可能に接合されることになる。なお、この第1リンク機構250の長手方向の両側面には直線上の溝252が構成されている。
また、ベース部210の高段部212表面には、断面がコの字型となる部材の両端を外側に直角に折り返した形状の(この折り返し部分をタブと呼ぶ)スライド支点ベース部241が、回転入力軸221に対する相対位置が固定されて配置されている。この例の場合、スライド支点ベース部241は、回転入力軸221からベース部210の中央部側(すなわち低段部211方向)へずれた位置(より具体的には、図22の静止状態において第1リンク機構250の回転入力軸221側先端付近が配置される位置)にタブを通じてねじ止めされる。このスライド支点ベース部241の内側中央部には、第1リンク機構250の溝252を両側からスライド可能に抱え込むスライド支点機構242が配置される。このスライド支点機構242は、スライド支点回転軸243(ビス等)によってスライド支点ベース部421に対しW3方向に回転可能に取り付けられる。なお、このスライド支点回転軸243の位置は第1回転軸233よりもベース部210中央寄り(低段部211寄り)である。以上により、スライド支点機構242は、回転入力軸221と平行なスライド支点回転軸243(ビス等)によってスライド支点ベース部241にW3方向に回転可能に接合され、第1リンク機構250を長手方向(W7方向)へスライド可能に保持することになる。
第1リンク機構250の他端部のベース部210側には、補強部材260がねじ261、262によってねじ止めされ、この補強部材260を介し、柱状の第2リンク機構270の端部が第2回転軸251によってW4方向に回転可能に取り付けられる。
また、図22における回転入力軸221とスライド支点回転軸243とを結ぶ直線上に位置するベース部210低段部211表面には柱状のレール281が、ねじ281a〜281fによってねじ止めされる。このレール281の長手方向(W6方向)の両側面には直線上の溝282aが設けられ、このレール281上には、これらの溝282aを両側から挟みこみ、このレール281に沿ってW6方向にスライド移動するスライド機構282が配置される。このスライド機構282におけるレール281と反対側の面には、錘保持板283が固着される。そして、この錘保持板283のベース部210と反対側面の両端には錘284、285(慣性質量)が、ねじ284a、284b、285a、285bによってそれぞれねじ止めされる。また、この錘保持板283の中央部には、第3回転軸283a(ビス等)によって第2リンク機構270の他端部がW5方向に回転可能に取り付けられる。この構成により、スライド機構282には、第2回転軸251以外の第2リンク機構270上の部分が、当該第2回転軸251と平行な第3回転軸283aによって回転可能に接合され、このスライド機構282の移動範囲は、レール281によって一方向(W6方向)のスライド運動に限定されることとなる。
図24A及び図24Bは、モータ220によって回転入力軸221がW1方向回転した際の各機構の動きを例示した図である。これらの図に示すように、回転入力軸221がW1方向回転するとそれに保持されている第1回転軸233もW1方向に回転移動する。これに伴い、第1リンク機構250の第1回転軸233に保持された部分も当該第1回転軸233を中心としたW2方向の回転運動を伴いながらスライド移動する。この移動に伴い、第1リンク機構250の第2回転軸251部分に保持された第2リンク機構270も、第2回転軸251を中心とした回転運動を伴いながらスライド移動する。そして、この移動に伴い、第2リンク機構270の第3回転軸283a部分に回転保持された錘保持板283及びスライド機構282がW6方向に移動する。
これにより、加速度発生装置201は、前述したのと同様な原理により、W6方向の擬似的な力覚を発生させる。
〔特許文献1の説明終わり〕
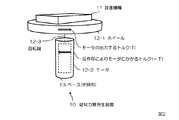
図1、図2に戻り、再び本発明の実施例1に係る疑似力覚発生装置10について説明する。上述のように並進機構11としては特許文献1に各実施形態において開示された加速度発生装置を用いることができる。回転機構12については以下の原理で回転方向の疑似的な力覚を発生させることができる。図2に示すように回転機構12はホイール12−1と、モータ12−2と、回転軸12−3とを備える。モータ12−2は回転力を発生させる。回転軸12−3はモータ12−2が発生させた回転力をホイール12−1に伝達する。なお、ベース13は、上端面に回転軸12−3を挿通することができるよう穴を空けた円筒形状である。モータ12−2はベース13内部に存在しベース13の内面に固定支持されている。回転力については角運動量保存則に基づく。一般に、慣性モーメントI(kg・m2)のホイール12−1が角速度ω(rad/s)で回転しているとき、ホイール12−1の速度を変化させるために必要なトルクT(N・m)は、
T=I*dω/dt・・・(2)
で与えられる。dω/dtはωの時間微分を表す。ホイール12−1の速度を変化させる場合、モータ12−2(あるいはブレーキ)で必要なトルクT(N・m)を出力する必要がある。このとき作用反作用の関係から、モータ12−2を支持するベース(把持部)13には−T(N・m)のトルクが発生する(角運動量保存則)ので、ベース(把持部)13を人間に固定させる、あるいは把持させれば−Tのトルクが人間に伝達される。
本実施例の疑似力覚発生装置10がある回転方向に大きな疑似力覚を発生させ、もう一方の回転方向にはほとんど疑似力覚を発生させないようにするための仕組みを以下に説明する。このような制御を行うためには大きく分けて二つのアプローチがある。一つはホイール12−1の角加速度を適切に制御する方法である。もう一つは、ホイール12−1上の並進機構11の錘の位置を制御することにより、慣性モーメントの制御を行う方法である。
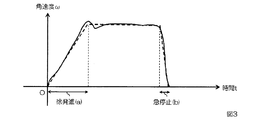
まず、角加速度を適切に制御する方法について説明する。図3を参照して本発明の疑似力覚発生装置10のホイール12−1に対して行われる角速度制御の例を示す。図3では横軸を時間tとし、縦軸を角速度ωとしてホイール12−1を徐発進、急停止させた場合の角速度の変化の例を示している。図中の破線は、本実施例の疑似力覚発生装置10に対する徐発進、定速運動、急停止の制御指令における角速度の理論値である。実線はこの制御指令に対して疑似力覚発生装置が示した実際の挙動である角速度実測値である。本実施例ではホイール12−1が回転していない状態ω=0を初期値および目的値とする。従来技術では、回転機構12に該当する機構がω=0以外のある一定の角速度で回転させる(例えば非特許文献3)が、本実施例では、ω=0を目的値としている。これにより、疑似力覚発生装置10を持っている手が回転方向と直交する軸回りに回転した場合のジャイロ効果による所望の方向でない方向へのトルク発生を防止し、これにより、より正しい方向にトルク感覚を提示することができる。図3に戻り、徐発進(a)の状態、および急停止(b)の状態でそれぞれ角加速度が発生しているため、反動トルクが発生する。このとき、角加速度であるdω/dtが大きければより大きな反動トルクが発生する。なお、徐発進(a)では回転する方向と逆方向に反動トルクが、急停止(b)では回転方向と同じ方向に反動トルクが、それぞれ生成される。徐発進(a)において発生する反動トルクの提示時間を人間の感じるトルク知覚が小さくなる値域に設定し、同時に急停止(b)において発生する反動トルクの提示時間を人間の感じるトルク知覚が大きくなる値域に設定することで、回転方向にのみひねられているように感じる回転方向の疑似力覚の提示が可能となる。例えば、反時計回りの反動トルク提示時間を長くしたければ、ホイール12−1を反時計回りに徐発進し緩やかに加速し、急停止させればよい。また、ホイール12−1を時計回りに急発進(急加速し)、緩やかに減速して徐停止させればよい。反対に時計回りの反動トルク提示時間を長くしたければ、ホイール12−1を時計回りに徐発進し緩やかに加速し、急停止させればよい。また、ホイール12−1を反時計回りに急発進(急加速し)、緩やかに減速して徐停止させればよい。図4に本実施例に係る疑似力覚発生装置10の角速度の時間変化の例を示す。図4は横軸を時間(sec)、縦軸を角速度(rad/sec、ただし反時計回りの角速度を正)としてホイール12−1をいろいろなパターンで加速減速させた場合の角速度の変化の例を示している。図4(1)は、時計回りに急発進させ、徐停止させた場合、図4(2)は、反時計回りに急発進させ、徐停止させた場合、図4(3)は、時計回りに徐発進させ、急停止させた場合、図4(4)は、反時計回りに徐発進させ、急停止させた場合である。前述したように、図4(1)の例では反時計回りに大きな疑似力覚が、図4(2)の例では時計回りに大きな疑似力覚が、図4(3)の例では時計回りに大きな疑似力覚が、図4(4)の例では反時計回りに大きな疑似力覚が、それぞれ知覚される。図中の実線はホイール12−1の回旋角度がπの場合、一点鎖線はホイール12−1の回旋角度がπ/2の場合、破線はホイール12−1の回旋角度がπ/4の場合を示している。このようにホイール12−1の回旋角度が大きくなればなるほど、徐発進(徐停止)に要する時間も大きくなるが、急停止(急発進)において生じる反動トルクの提示時間が大きくなり、より大きな疑似力覚の提示が可能となる。図5に本実施例に係る疑似力覚発生装置10の反動トルクの時間変化の例を示す。図5は横軸を時間(sec)、縦軸を反動トルク(Nm、ただし反時計回りの反動トルクを正)としてホイール12−1をいろいろなパターンで加速減速させた場合の反動トルクの変化の例を示している。図4と同様に、図5(1)は、時計回りに急発進させ、徐停止させた場合、図5(2)は、反時計回りに急発進させ、徐停止させた場合、図5(3)は、時計回りに徐発進させ、急停止させた場合、図5(4)は、反時計回りに徐発進させ、急停止させた場合である。疑似力覚は反動トルクの発生向きに、反動トルクの提示時間増大に従って大きくなるように知覚される。従って、図5に示す通り、図5(1)の例では反時計回りに大きな疑似力覚が、図5(2)の例では時計回りに大きな疑似力覚が、図5(3)の例では時計回りに大きな疑似力覚が、図5(4)の例では反時計回りに大きな疑似力覚が、それぞれ知覚される。また、図5の(イ)、(ロ)はそれぞれ(イ)がホイール12−1の発進から停止までの時間を短く制御した場合、(ロ)がホイール12−1の発進から停止までの時間を(イ)と比べて長く制御した場合である。(イ)は(ロ)と比較して、短い時間で発進から停止に至るため、徐発進(徐停止)の際にも比較的大きな疑似力覚が発生する。
次に、並進機構11の錘の位置を制御することにより慣性モーメントを制御して、ある回転方向に大きな疑似力覚を発生させ、もう一方の回転方向にはほとんど疑似力覚を発生させないようにするための仕組みを説明する。特許文献1における錘を持つ並進機構では、錘が最も回転中心から離れた場所に存在するとき、慣性モーメントは最大となる。従って、反時計回りに大きな反動トルクを発生させたければ、ホイール12−1を反時計回りに発進動作をしている最中には錘をホイール12−1の回転軸付近に制御して慣性モーメントを最小とし、ホイール12−1が反時計回り方向の回転から停止動作をしている最中には錘をホイール12−1の外縁付近に制御して慣性モーメントを最大とすればよい。また、ホイール12−1を時計回りに発進動作をしている最中には錘をホイール12−1の外縁付近に制御して慣性モーメントを最大とし、ホイール12−1が時計回り方向の回転から停止動作をしている最中には錘をホイール12−1の回転軸付近に制御して慣性モーメントを最小とすればよい。反対に時計回りに大きな反動トルクを発生させたければ、ホイール12−1を反時計回りに発進動作をしている最中には錘をホイール12−1の外縁付近に制御して慣性モーメントを最大とし、ホイール12−1が反時計回り方向の回転から停止動作をしている最中には錘をホイール12−1の回転軸付近に制御して慣性モーメントを最小とすればよい。また、ホイール12−1を時計回りに発進動作をしている最中には錘をホイール12−1の回転軸付近に制御して慣性モーメントを最小とし、ホイール12−1が時計回り方向の回転から停止動作をしている最中には錘をホイール12−1の外縁付近に制御して慣性モーメントを最大とすればよい。このように、並進機構11の錘の位置を制御することにより慣性モーメントを制御することで、角加速度に変化をつけない(例えば、図3における徐発進(a)と急停止(b)の角加速度が等しい)場合でも、所望の回転方向に疑似力覚を発生させることができる。もちろん、前述の角速度制御と錘の位置による慣性モーメント制御を同時に行えばさらに大きな疑似力覚を提示することが可能である。
なお、特許文献1の第4実施形態における加速度発生装置40を本実施例の並進機構11として採用する場合には、可動鉄芯47の位置を制御することで慣性モーメントの制御が可能である。巻き数調整機構48a、48bによって、バネ44aのバネ定数を制御し、可動鉄心47の位置を制御する。より具体的には、加速度発生装置40の、例えばバネ44a側への可動鉄芯47の可動限界における重心位置と、本実施例の回転機構12の回転軸位置が重なるように、加速度発生装置40を回転機構12上に固定する。このとき、バネ44b側への可動鉄芯47の可動限界における重心位置が、回転機構12の外縁部に配置されるように加速度発生装置40を配置固定しなければならない。そして、慣性モーメントを小さくする制御の場合には、バネ44aを短くし、バネ44bを長くする制御、反対に慣性モーメントを大きくする場合には、バネ44aを長くし、バネ44bを短くする制御を行えばよい。また、特許文献1の第11実施形態における加速度発生装置201を本実施例の並進機構11として採用する場合には、錘284の位置を制御することで慣性モーメントの制御が可能である。この場合、レール281の歯車291側の端部を本実施例の回転機構12の回転軸中心と重なるように、加速度発生装置201を回転機構12上に固定する。このとき、レール281の歯車291と反対側の端部が、回転機構12の外縁部に配置されるように加速度発生装置201を配置固定しなければならない。そして、慣性モーメントを小さくする制御の場合には、錘284を歯車291と最も近くなるように制御し、反対に慣性モーメントを大きくする場合には、錘284を歯車291と最も遠くなるように制御を行えばよい。
次に、図6を参照して、本実施例の疑似力覚発生装置10において知覚させたい並進方向が変化する場合の制御方法について説明する。図6は本実施例に係る疑似力覚発生装置10が並進方向の疑似力覚発生方向を変化させる場合に行う制御を説明する図である。本実施例の疑似力覚発生装置10は前述のように並進機構11のほかに回転機構12をも備えた構造であるため、当然のことながら並進方向の疑似力覚(以下、疑似並進力覚ともいう)の向きを変化させたい場合に回転機構12を用いることができる。疑似並進力覚の向きが変化する場合とは、例えば本実施例の疑似力覚提示装置10を盲人の街路における誘導に用いる場合などである。例えば本実施例の疑似力覚提示装置10を把持したユーザ(盲人)に交差点を東に曲がるという情報を提示するには、並進機構11を動作させることで東側に疑似力覚を提示する。次の交差点を南に曲がるという情報を提示するためには、疑似力覚提示装置の回転機構12を動作させることでホイール12−1を南向きに回転させ、並進機構11を動作させることで南側に疑似力覚を提示する。このように回転機構12は疑似並進力覚の向きを変化させるために用いることができる。さらに、回転機構12がホイール12−1の回転制御に関し図6に示す制御を実行することで、新たな疑似並進力覚の向きを予測させるガイド機能を付与することができる。現在の疑似並進力覚提示方向を細実線矢印で示す。1時刻後の疑似並進力覚提示方向を細破線矢印で示す。図6に示すように、現在の疑似並進力覚提示方向と、1時刻後の疑似並進力覚発生方向とがなす角度がα(αは180以下の実数で、単位は度)であるとき、ホイール12−1が角度αの回転方向の疑似力覚(以下、疑似回転力覚ともいう)を発生させるように制御される。この疑似回転力覚が、疑似力覚発生装置10のベース(把持部)13を把持するユーザにとって、1時刻後の疑似並進力覚提示方向についての予測を容易にするガイド機能となりうる。ユーザは現在の疑似並進力覚の発生方向が変化するタイミングに生じる疑似回転力覚の向きに180度以下の回転を伴って、1時刻後の疑似並進力覚が発生するであろうことを容易に予測できるからである。疑似力覚発生装置10の制御の詳細を具体的に示せば、角度αの回転方向(反時計回り)にホイール12−1を回転させる場合には、徐発進させ、急停止させる制御を行う。角速度の制御によらず、慣性モーメントの制御により行う場合には、角度αの回転方向(反時計回り)にホイール12−1を回転させる場合には、発進動作の最中には錘をホイール12−1の回転軸付近に制御して慣性モーメントを最小とし、停止動作の最中には錘をホイール12−1の外縁付近に制御して慣性モーメントを最大とすればよい。角度αの回転方向と逆方向(角度360−αの方向、時計回り)にホイール12−1を回転させる場合には、急発進させ、徐停止させる制御を行う。角速度の制御によらず、慣性モーメントの制御により行う場合には、角度360−αの回転方向(時計回り)にホイール12−1を回転させる場合には、発進動作の最中には錘をホイール12−1の外縁付近に制御して慣性モーメントを最大とし、停止動作の最中には錘をホイール12−1の回転軸付近に制御して慣性モーメントを最小とすればよい。上述した2つの回転方向の何れによっても、反時計回りに大きな反動トルクが発生し、ユーザに対して1時刻後の疑似並進力覚の発生方向をガイドできる。ここで、図4で説明したようにホイール12−1の回旋角度が大きくなればなるほど、徐発進(徐停止)に要する時間も大きくなるが、急停止(急発進)において生じる反動トルクの提示時間も大きくなり、より大きな疑似力覚の提示が可能となる。従って、上記の何れの回転方向でもユーザをガイドすることは可能であるが、ホイール12−1を360−αの回転方向に回転させたほうがより大きな回転疑似力覚の提示が可能であるため、ガイド機能を達成する方法として最適である。
次に図7を参照して本実施例の疑似力覚発生装置10における力ベクトルの合成について説明する。図7は本実施例に係る疑似力覚発生装置10における力ベクトルの合成について説明する図である。回転疑似力覚と並進疑似力覚とを同時に提示することで図7のようなベクトル合成が起こる。つまり、トルク成分を接線方向の力ベクトルに分解したときに並進方向の力ベクトルとそれと同一方向のトルク成分を分解した力ベクトルとが足し合わせられる。一方並進方向の力ベクトルと同一でない方向のトルク成分を分解した力ベクトルは足し合わせられない。結果として本実施例の疑似力覚発生装置10により、ひねりながら牽引されるといった新規な疑似力覚の提示が可能となる。
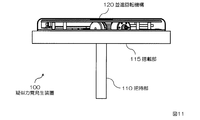
次に、図11、図12を参照して、本発明の実施例2に係る疑似力覚発生装置100についてその概略を説明する。図11は本実施例に係る疑似力覚発生装置100の構成を示す正面図である。図12は本実施例に係る疑似力覚発生装置100の構成を示す平面図である。
図11に示すように、疑似力覚発生装置100は、把持部110と、搭載部115と、並進回転機構120とを備える。把持部110は丸棒形状である。把持部110の長手方向と垂直な断面直径を金属板122aや金属板123aの直径と比較して十分小さくすることにより、トルク感覚を明確に与えることが可能である。搭載部115は円盤形状であって、その上面に円形の浅い凹部を設けてある。搭載部115の下面側には、円盤の中心軸と軸心が一致されて把持部110の上面部が固着されている。並進回転機構120は、円形であって、搭載部115の上面の凹部に搭載され固定されている。
図13、14に並進回転機構120の外観を示す。図13は本実施例に係る並進回転機構120の構成を示す正面図である。図14は本実施例に係る並進回転機構120の構成を示す平面図である。
次に図15を参照して、並進回転機構120の構成について詳細に説明する。図15は、本実施例に係る並進回転機構120の構成を示す分解斜視図である。図15に示すように、並進回転機構120は、上ケース121と、第1可動構造体122と、第2可動構造体123と、下ケース124とからなる。上ケース121および下ケース124は一端面が閉塞され、他端面が解放された半透明の薄い円筒形状である。上ケース121および下ケース124の開放端面同士は接着されて一体のケースとなる。第1可動構造体122は軽量化用の穴を設けた円形の金属板122aを備える。同様に、第2可動構造体123は軽量化用の穴を設けた円形の金属板123aを備える。上ケース121、下ケース124の開放端面内径は金属板122a、金属板123aの外径よりも若干大きい。また、金属板122a、金属板123aの外径は等しい。上ケース121上面の中心には穴121a、金属板122a中心には穴122b、金属板123a中心には穴123bが設けてあり、この穴121a、穴122b、穴123bを図示しないボルト(後述するスライド支点回転軸1231)が挿通されることで、上ケース121、金属板122a、金属板123aが固定される。また、金属板123aには、位置決めピン123c、123d、123e、123fが金属板123a端部に等間隔に金属板123aの面と、位置決めピンの軸心が垂直をなすように設けられている。金属板122aには、第1可動構造体122と第2可動構造体123とが後述する位置関係となるように位置決め穴122c、122d、122e、122fが設けられており、位置決めピン123cと位置決め穴122c、位置決めピン123dと位置決め穴122d、位置決めピン123eと位置決め穴122e、位置決めピン123fと位置決め穴122fとが接合されている。また、第2構造体123にはラック123gが備えられている。ラック123gは図13に示されるように、モータピニオンとピニオンに挟まれる形で設置されるものであり、モータピニオン及びピニオンに接する面が摩擦係数の大きな材質(例えばゴム)からなる平面、もしくは、歯車で構成される。ラック123gの内径は金属板122aおよび金属板123aの外径と等しい。ラック123gのリング外側面は、上ケースの内側面と接着固定されている。ラック123gと第2可動構造体123との支持方法、ラック123gの役割などについての詳細は後述する。
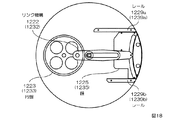
次に図16を参照して、第2可動構造体123について詳細に説明する。図16は、本実施例に係る第2可動構造体123の構成を示す平面図である。第2可動構造体123は、スライド支点回転軸1231(ビス、ボルト等)、リンク機構1232、錘連結軸1232b、円盤1233(クランク)、リンク連結軸1233a、円盤連結軸1234、錘1235、第2並進モータ1236、ローラ1236a、第1回転モータ1237a、第1モータピニオン1237aa、第1モータ軸1237ab、第2回転モータ1237b、第2モータピニオン1237ba、第2モータ軸1237bb、4つの軸固定部材1238a、1238b、1238c、1238d、4つのピニオン1238aa、1238ba、1238ca、1238da、4つのピニオン軸1238ab、1238bb、1238cb、1238db、レール1239a、レール1239bを備える。前述したように金属板123aの中心には穴123bが設けられており、この穴123bにスライド支点回転軸1231が挿通されている。また、モータピニオン1237aaの第1モータ軸1237abを挟んだ反対側、および、モータピニオン1237baの第2モータ軸1237bbを挟んだ反対側には、それぞれ回転量計測器1237ac、1237bcが設けられており、可動構造体123の基準となる方向からの現在の角度変移量を測定する。なお、モータピニオンと対応するように回転量計測器1237ac、1237bcを設置する代わりに、図15の穴121の位置に回転量計測器を1つ設ける構成としても、同様の機能を実現することができる。軸固定部材1238a、1238b、1238c、1238dは直方体形状であり、その長手方向が金属板123aの法線方向と垂直な向きになるよう金属板123a上面に取り付けられる。軸固定部材1238a、1238b、1238c、1238dの金属板123a中心から遠い側の側面の中心に、この側面と垂直になるようにピニオン軸1238ab、1238bb、1238cb、1238dbの軸の一端が固定されている。ピニオン軸1238ab、1238bb、1238cb、1238dbの軸の他端にはそれぞれのピニオン軸を回転軸としてピニオン1238aa、1238ba、1238ca、1238daが回転可能に取り付けられている。軸固定部材1238a、1238b、1238c、1238dはピニオン1238aa、1238ba、1238ca、1238daが金属板123aの端部から突出するように、ピニオン軸1238ab、1238bb、1238cb、1238dbの軸方向が金属板123aの外円の法線方向と等しくなるように金属板123aの端部に近い位置に固定されている。軸固定部材1238a、1238b、1238c、1238dは隣り合う2つのピニオン軸がなす角が全て等しく90度となるように均等に配置されている。金属板123a上面には、ピニオン軸1238abの中央とピニオン軸1238bbの中央とを端点とし、金属板123aと中心を同じくする円弧を二等分する点(図中P点と表記)と、金属板123aの中心との略中央に金属板123aの面と垂直な向きに円盤連結軸1234が固定されている。円盤1233の中心には穴が空けられており、円盤連結軸1234は、円盤1233の穴に挿通されている。円盤1233は円盤連結軸1234によって金属板123aに対して回転可能に連結されている。円盤1233には軽量化のための円形穴が4つ空けられている。なお、円盤1233の直径は金属板123aの半径よりも小さいものとする。円盤1233の上面には、リンク連結軸1233aが円盤1233の面と垂直な向きに固定されている。リンク機構1232は長板状の部材である。リンク機構1232の一端には穴が空けられておりリンク連結軸1233aは、リンク機構1232の一端に空けられた穴に挿通されている。リンク機構1232はリンク連結軸1233aによって円盤1233に対して回動可能に連結されている。リンク機構1232の中心部には長円形穴1232aが設けられており、長円形穴1232aにスライド支点回転軸1231が挿通されている。リンク機構1232の穴が空けられた端部と反対側の端部の下面には、錘連結軸1232bがリンク機構1232の下面と垂直な向きに取り付けられている。錘1235は厚板形状であって、円弧形穴1235aが空けられており、この円弧形穴1235aに錘連結軸1232bが挿通されている。レール1239aおよびレール1239bは、円盤連結軸1234の中心とスライド支点回転軸1231の中心とを結ぶ直線と平行な向きになるよう金属板123aに固定されている。レール1239a、レール1239bは長手方向の一側面にガイド溝を設けた直方体形状である。レール1239a、レール1239bは、ガイド溝を設けた側面が互いに向き合うように金属板123aに取り付けられている。錘1235は、金属板123aに対して、円盤連結軸1234の中心とスライド支点回転軸1231の中心とを結ぶ直線と平行な向きに並進可能にレール1239aおよびレール1239bのガイド溝に支持されている。
第2並進モータ1236は、以下のように円盤1233にトルクを加えることができるよう適切な位置、適切な向きに金属板123aの上面に固定されている。第2並進モータ1236の回転軸端部にはローラ1236aが回転可能に取り付けられている。ローラ1236aの外側面は円盤1233の上面の端部と一定の圧がかかった状態で接触しており、ローラ1236aの回転により、ローラ1236aと円盤1233との間に摩擦力が生じ、この摩擦力によって円盤1233が回転する。ローラ1236aの外側面は摩擦係数の大きな材質(例えばゴム)などで覆われている。なお、ローラ1236aの外側面は、の代わりに、摩擦係数の大きな材質(例えばゴム)からなる面とする代わりに、歯車としてもよい。第2並進モータ1236がローラ1236aを介して円盤1233に動力を伝え、円盤1233を回転させる。円盤1233が回転することにより、円盤1233に連結されたリンク機構1232がスライド支点回転軸1231回りに並進運動を伴う回動動作をする。リンク機構1232がスライド支点回転軸1231回りに並進運動を伴う回動動作をすることにより、リンク機構1232の一端に連結された錘1235がレール1239a、1239bに支持されて、並進運動を行う。第2並進モータ1236は、その回転軸の角加速度を自在に制御可能であるものとし、これにより、錘1235の並進運動の加速度を任意に制御することができる。
第1回転モータ1237aおよび第2回転モータ1237bはその回転軸端部にモータピニオン1237aaおよびモータピニオン1237baが回転可能に取り付けられている。第1回転モータ1237aおよび第2回転モータ1237bはモータピニオン1237aaおよびモータピニオン1237baが金属板123aの端部から突出するように、回転軸方向が金属板123aの外円の法線方向と等しくなるように金属板123aの端部に近い位置に固定されている。第1回転モータ1237aおよび第2回転モータ1237bはそれぞれの回転軸方向が平行になるよう、180度異なる向きに取り付けられている。
上記のようにピニオン1238aa、1238ba、1238ca、1238da、モータピニオン1237aa、1237baがそれぞれ、金属板123aから突出するようにそれぞれの軸で回転可能に取り付けられており、この6つのピニオン1238aa、1238ba、1238ca、1238da、1237aa、1237baに前述のラック123gが連結されている。図13を再度参照して6つのピニオン1238aa、1238ba、1238ca、1238da、1237aa、1237baとラック123gの連結方法の詳細について説明する。モータピニオン1237baはラック123gのリング上面に乗るように連結されている。図示されていないモータピニオン1237aaも同様である。一方、ピニオン1238ba、およびピニオン1238daはラック123gのリング下面に連結されている。図示されていない他のピニオンも同様である。第1可動構造体122と第2可動構造体123は上ケース121および下ケース124とは直接接触しないように、上ケース121および下ケース124に収容されている。前述したように第1可動構造体122と第2可動構造体123は、金属板123aに固定された6つのピニオンを介してラック123gに支持されている。前述したようにラック123gの外側面は上ケース内側面と固着されているため、第1可動構造体122と第2可動構造体123は、6つのピニオンを介してラック123gおよび上ケース121に対して回転可能に連結されている。第1回転モータ1237aおよび第2回転モータ1237bがそれぞれモータピニオン1237aa、モータピニオン1237baを回転させることにより、各モータピニオンからラック123gに動力が伝わり、この動力によって第1可動構造体122と第2可動構造体123は、上ケース121に対して回転する。第1回転モータ1237aおよび第2回転モータ1237bは逆回転させることも可能であり、第1可動構造体122と第2可動構造体123は反時計回り、時計回りの何れの方向にも回動可能である。
次に、図15に戻り、第1可動構造体122について説明する。第1可動構造体122は第2可動構造体123とほぼ同じ構成を有する。第1可動構造体122と第2可動構造体123との違いは、第2可動構造体123が第1回転モータ1237a、第1モータピニオン1237aa、第1モータ軸1237ab、第2回転モータ1237b、第2モータピニオン1237ba、第2モータ軸1237bb、4つの軸固定部材1238a、1238b、1238c、1238d、4つのピニオン1238aa、1238ba、1238ca、1238da、4つのピニオン軸1238ab、1238bb、1238cb、1238db(以下、これらをまとめて回転機構という)を備えるのに対し、第1可動構造体122にはこれらが存在しないことである。従って、第1可動構造体122は、リンク機構1222、錘連結軸1222b、円盤1223、リンク連結軸1223a、円盤連結軸1224、錘1225、第1並進モータ1226、ローラ1226a、レール1229a、レール1229bを備える(以下、これらをまとめて第1並進機構という)。第1可動構造体122の並進機構を構成する部材は第2可動構造体123の対応する部材(リンク機構1232、錘連結軸1232b、円盤1233、リンク連結軸1233a、円盤連結軸1234、錘1235、第2並進モータ1236、ローラ1236a、レール1239a、レール1239b、以下これらをまとめて第2並進機構という)と全く同じように配置され、同じ動作機能を有するので説明を省略する。ここで、前述したように第1可動構造体122と第2可動構造体123とは位置決めピン123c、123d、123e、123fが位置決め穴122c、122d、122e、122fにそれぞれ接合されている。このとき、第1可動構造体122と第2可動構造体123とは、第1可動構造体122の錘1225が金属板122aの中心から端部に向かうときの並進方向と、第2可動構造体123の錘1235が金属板123aの中心から端部に向かうときの並進方向とがちょうど逆方向になるように接合されているものとする。
このように、本実施例の疑似力覚発生装置100が二つの並進機構(第1並進機構、第2並進機構)を備えることにより、それぞれの並進機構が、自身の属する方位から±90°の範囲の疑似並進力覚提示を担当すればよくなるため、回旋角度±90°のみで全ての方向への疑似並進力覚の提示が可能である。従って、疑似並進力覚の提示方向を速く制御したい場合などには本実施例の疑似力覚発生装置100のように、並進機構を2または2以上の複数備えていることが望ましい。
次に図8、図9を参照して本実施例の疑似力覚発生装置100の角速度制御に用いられるシステムについて詳細に説明する。図8、図9は本実施例に係る疑似力覚発生装置100の制御を行うシステムの構成を示すブロック図である。制御部(PC)140はコンピュータなどで構成される。制御部(PC)140は、予め定めた周期で電流増幅器150に電流増幅、電流減衰の何れかを示す制御信号を出力する。制御信号を取得した電流増幅器150は、制御信号に従って、第1並進モータ1226および第2並進モータ1236に流れる電流量を制御する。第1並進モータ1226および第2並進モータ1236は制御部(PC)140、電流増幅器150によって別個独立に制御可能であるものとする。電流増幅器150が、錘1225(1235)が第1(2)可動構造体122(123)の中心から外縁方向に向かって並進するタイミングで電流を増幅し、外縁から中心方向に向かって並進するタイミングで電流を減衰させることで、疑似並進力覚を提示することができる。また、制御部(PC)140は、予め定めた方向に疑似並進力覚を提示するため、所定の角度だけ第1回転モータを回転させるのに必要な電流量と通電時間を示す制御信号を出力する。ここで、制御部(PC)140は、反動トルクを発生させたい方向と逆方向の角加速度が大きくなるように電流量の増加速度を制御するものとする。また、制御部(PC)140は、図6で述べたように反動トルクを発生させるにあたって回転方向を反時計方向、時計方向の何れにするのが最適かを判定し、その回転方向も制御可能であるものとする。制御信号を取得した電流増幅器160は、制御信号に従って、第1回転モータ1237a、第2回転モータ1237bに流れる電流量、通電時間、電流量の増加速度、モータの回転方向を制御する。回転量計測器1237ac、1237bcは、第1可動構造体122および第2可動構造体123の基準となる方向からの現在の角度変移量を測定して、制御部(PC)140に出力することで、制御部(PC)140がフィードバック制御を行うことができる。
疑似力覚発生装置100の制御を行うシステムは図9に示すように図8の構成に加えて姿勢センサ180を備えることとしても良い。姿勢センサ180は、ユーザが手首をひねるなどして疑似力覚発生装置100自体の向きが変わってしまった場合にも、正しい方向に疑似並進力覚を提示することができるように取り付けられている。具体的には、姿勢センサ180は、第1回転モータ1237a、第2回転モータ1237bによって回転制御されない、例えば上ケース121、下ケース124などの向きの変移量を計測することにより、ユーザが手首をひねるなどして回転させた疑似力覚発生装置100の回転量を計測する。姿勢センサ180は計測した回転量を制御部(PC)140に出力することで、制御部(PC)140は、疑似力覚発生装置100自体の回転により生じた誤差をフィードバック補正することが可能である。
モータの電圧変化による速度制御の場合、角速度変化の最大値はモータの出力トルクに依存する。そのため、強力な停止トルクを提示するためには機械式ブレーキを採用しても良い。また、電圧の強さで粘性が制御できるER(エレクトロレオロジー)流体を利用したERブレーキを用いれば、ブレーキ効果において高い応答速度を実現できる。また、回旋のバックドライバビリティを確保するためには、回旋部に歯車伝動を採用し、十分な回旋性能を有した状態で、ゴム製ブレーキシューを回旋部に付与することで停止トルクを向上させればよい。
前述と同様に、本実施例の疑似力覚発生装置100がある回転方向に大きな疑似力覚を発生させ、もう一方の回転方向にはほとんど疑似力覚を発生させないようにするための制御には大きく分けて二つのアプローチがある。一つは図7及び図8で説明したシステムが行う制御のように第1可動構造体122および第2可動構造体123の角加速度を適切に制御する方法である。もう一つは、第1可動構造体122および第2可動構造体123上の錘1225、1235の位置を制御することにより、慣性モーメントの制御を行う方法である。具体的には、本実施例の疑似力覚発生装置100で提示したい疑似並進力覚の向きが変化する場合、例えば図6のように、現在の疑似並進力覚の提示方向と1時刻後の疑似並進力覚の提示方向とがなす角度が角α(αは180以下の実数)であった場合、角度αの回転方向(反時計回り)に第1可動構造体122および第2可動構造体123を回転させる場合には、発進動作の最中には錘1225(1235)を第1可動構造体122および第2可動構造体123の回転軸付近に制御して慣性モーメントを最小とし(図17の状態)、停止動作の最中には錘1225(1235)を第1可動構造体122および第2可動構造体123の外縁付近に制御して慣性モーメントを最大とすればよい(図18の状態)。角度360−αの回転方向(時計回り)に第1可動構造体122および第2可動構造体123を回転させる場合には、発進動作の最中には錘1225(1235)を図18の状態に制御して慣性モーメントを最大とし、停止動作の最中には錘1225(1235)を図17の状態に制御して慣性モーメントを最小とすればよい。上述した2つの回転方向の何れによっても、反時計回りに大きな反動トルクが発生し、ユーザに対して1時刻後の疑似並進力覚の発生方向をガイドできる。ここで、図4で説明したように第1可動構造体122および第2可動構造体123の回旋角度が大きくなればなるほど、徐発進(徐停止)に要する時間も大きくなるが、急停止(急発進)において生じる反動トルクの提示時間が大きくなり、より大きな疑似力覚の提示が可能となる。従って、上記の何れの回転方向でもユーザをガイドすることは可能であるが、第1可動構造体122および第2可動構造体123を360−αの回転方向に回転させたほうがより大きな回転疑似力覚の提示が可能であるため、ガイド機能を達成する方法として最適である。
図10を参照して、本実施例の疑似力覚提示装置100を用いて行った被験者評価実験について説明する。被験者評価実験では実験の目的を知らない,右利きの実験協力者12名(男女)により評価実験を行った。図10は本実施例に係る疑似力覚発生装置100について行われた被験者評価実験の結果を示す図である。図10は横軸を回転角度(deg、ただし反時計回りを正とする)とし、縦軸を反時計回りにひねられたと感じた人の割合として、その結果を示すものである。トルクの提示パターンとして図5の(イ)、(ロ)の2パターンを用意した。図10の太実線で示すグラフは、図5(イ)のトルク提示パターンであって、横軸に示す回転方向から急減速した場合に反時計回りにひねられたと感じた被験者の割合を示す。太破線で示すグラフは、図5(イ)のトルク提示パターンであって、横軸に示す回転方向に急加速した場合に反時計回りにひねられたと感じた被験者の割合を示す。細実線で示すグラフは、図5(ロ)のトルク提示パターンであって、横軸に示す回転方向から急減速した場合に反時計回りにひねられたと感じた被験者の割合を示す。細破線で示すグラフは、図5(ロ)のトルク提示パターンであって、横軸に示す回転方向に急加速した場合に反時計回りにひねられたと感じた被験者の割合を示す。ここで、人間のトルクに対する知覚は(1)トルクが提示された時間が長く(2)提示されたトルクが大きいほど大きくなることを特徴とする。図5に示したように図5(イ)のトルク提示パターンは図(ロ)のトルク提示パターンよりもトルク提示時間が長い。回転角度を同じ条件としてトルク提示パターンのみ異なるプロット点を比較すると図5(イ)のトルク提示パターンのほうが図5(ロ)のトルク提示パターンよりも反時計回り、時計回りともにひねられたと感じる人の割合が上昇していることの理由である。さらに、図4で説明したように第1可動構造体122および第2可動構造体123の回旋角度が大きくなればなるほど、徐発進(徐停止)に要する時間も大きくなるが、急停止(急発進)において生じる反動トルクの提示時間も大きくなり、より大きな疑似力覚の提示が可能となる。従って、図10に示す回転角度(deg)の絶対値が大きくなればなるほど、より大きな疑似力覚の提示が行われていることになる。このため、例えば絶対値の大きくなる回転角度−180°における太破線(細破線)で示す条件での反時計回りにひねられたと感じた人の割合、絶対値の大きくなる回転角度180°における太実線(細実線)で示す条件での反時計回りにひねられたと感じた人の割合は何れも高くなる。従って、反時計回りの制御を行う場合にはこのグラフの縦軸の値が0.75を超えるような回転角度を目安とし、時計回りの制御を行う場合にはこのグラフの縦軸の値が0.25を超えるような回転角度を目安とすることができる。