JP2012145497A - 静電容量式力センサ - Google Patents
静電容量式力センサ Download PDFInfo
- Publication number
- JP2012145497A JP2012145497A JP2011005057A JP2011005057A JP2012145497A JP 2012145497 A JP2012145497 A JP 2012145497A JP 2011005057 A JP2011005057 A JP 2011005057A JP 2011005057 A JP2011005057 A JP 2011005057A JP 2012145497 A JP2012145497 A JP 2012145497A
- Authority
- JP
- Japan
- Prior art keywords
- force
- electrode
- load
- fixed
- force sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000006073 displacement reaction Methods 0.000 claims abstract description 35
- 239000000463 material Substances 0.000 claims abstract description 12
- 239000007769 metal material Substances 0.000 claims description 7
- 230000003068 static effect Effects 0.000 claims 1
- 238000001514 detection method Methods 0.000 abstract description 26
- 230000005540 biological transmission Effects 0.000 abstract description 10
- 238000000034 method Methods 0.000 description 18
- 239000000758 substrate Substances 0.000 description 15
- 229910000838 Al alloy Inorganic materials 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 5
- 239000002184 metal Substances 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 239000000806 elastomer Substances 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 229910000737 Duralumin Inorganic materials 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000012067 mathematical method Methods 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/14—Measuring force or stress, in general by measuring variations in capacitance or inductance of electrical elements, e.g. by measuring variations of frequency of electrical oscillators
- G01L1/142—Measuring force or stress, in general by measuring variations in capacitance or inductance of electrical elements, e.g. by measuring variations of frequency of electrical oscillators using capacitors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/26—Auxiliary measures taken, or devices used, in connection with the measurement of force, e.g. for preventing influence of transverse components of force, for preventing overload
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
- G01L5/165—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force using variations in capacitance
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
【課題】構造が単純な静電容量式力センサであって、小さな力から大きな力まで対応でき、検出精度が良好で、温度変化に対して検出の安定性が良い、安価な力センサを提供すること。
【解決手段】外部の装置または土台に取り付けて固定する固定部10と、外部からの力が作用する物体を取り付ける荷重取付け部16と、力を伝達する荷重伝達部14と、固定部10と荷重伝達部14の間に形成された弾性部12と、固定部に取り付けられた固定板20と、荷重伝達部14の固定板に対する対向面に形成された変位電極18と、固定板の荷重伝達部に対する対向面に形成された固定電極22と、を備え、変位電極と固定電極から成る3個以上の容量素子を形成し、固定部、荷重伝達部、弾性部、および、固定板を、線膨張係数がほぼ等しい材料で構成し、1軸ないし複数軸方向の力成分とモーメント成分の少なくとも一方を検出するようにしたことを特徴とする静電容量式力センサ。
【選択図】図1
【解決手段】外部の装置または土台に取り付けて固定する固定部10と、外部からの力が作用する物体を取り付ける荷重取付け部16と、力を伝達する荷重伝達部14と、固定部10と荷重伝達部14の間に形成された弾性部12と、固定部に取り付けられた固定板20と、荷重伝達部14の固定板に対する対向面に形成された変位電極18と、固定板の荷重伝達部に対する対向面に形成された固定電極22と、を備え、変位電極と固定電極から成る3個以上の容量素子を形成し、固定部、荷重伝達部、弾性部、および、固定板を、線膨張係数がほぼ等しい材料で構成し、1軸ないし複数軸方向の力成分とモーメント成分の少なくとも一方を検出するようにしたことを特徴とする静電容量式力センサ。
【選択図】図1
Description
本発明は、静電容量式力センサに関する。
ロボットの利用が高度化するに伴い、ロボットが発生する力を適切に制御するため、複数軸方向の力とモーメント成分を検出する力センサが求められている。このような力センサとして、ひずみゲージ式、静電容量式の力センサがある。ひずみゲージ式力センサは、ひずみゲージを使ってセンサボディに発生するひずみを検出し、加えられた力とモーメント成分を算出し、出力する方式である。センサボディの複数の箇所のひずみを検出することで複数軸方向の力とモーメント成分を算出することができ、直交3軸の直線軸方向の力と軸回りのモーメントの合計6軸成分を出力する力センサが製作されている。
静電容量式力センサは、加えられた力によって生じるセンサボディの変形を静電容量によって検出し、加えられた力とモーメント成分を算出し、出力する方式である。この方式では、検出できる力とモーメント成分を3軸成分に限定することにより構造が単純化され、非常に安価な力センサを作ることができる。
特許文献1には、固定基板と可撓基板を対向配置して装置筐体に固定し、各基板の対向面に形成した電極により容量素子を形成し、可撓基板に設けた作用体に外部から力が作用すると可撓基板が撓み静電容量が変化するので、その静電容量を検出して外部から作用した力を多軸方向の力成分として検出するようにした力検出装置が記載されている。
特許文献2には、導電性エラストマーでダイアフラム部と可動電極板を構成して、操作部に加えられた力により可動電極板がたわむ構造の静電容量式力覚センサが記載されている。
ひずみゲージ式力センサは、ひずみゲージをセンサボディの複数箇所に接着する方法を取っており、センサボディの構造が複雑な上、接着作業に大きな作業工数が必要で、コストが高いという問題がある。
静電容量式力センサは、外部から加えられた力により変位が発生して静電容量が変化するような構造となっており、その静電容量を検出することにより加えられた力を検出するようにしている。
静電容量式力センサは、外部から加えられた力により変位が発生して静電容量が変化するような構造となっており、その静電容量を検出することにより加えられた力を検出するようにしている。
特許文献1に、静電容量式力センサの基本的な構造が示されている。この構造では、外部から力が加わると可撓基板が撓み、静電容量が変化する。用途の1つとして加速度センサが挙げられており、この力検出装置は形状がかなり小さく、検出する力も小さいことが想定される。検出する力が大きく、形状も大きくなった場合、単純な形状をした可撓基板では良好な撓み特性を得ることが難しく、良好な検出精度を得ることが困難になる。装置筐体は可撓基板および固定基板と異なる材質を使用することが考えられ、その場合、周囲温度が変化すると材質の線膨張係数の違いによる熱膨張差によって装置筐体から圧縮あるいは伸張の力を受けるので、可撓基板および固定基板に撓みが発生する。力検出装置の形状が小さいと撓みが小さいので影響が少ないが、形状が大きくなると熱膨張差が大きくなり、可撓基板および固定基板の撓みが大きく発生する。その撓みにより静電容量が変化するので検出値が変動し、検出の安定性が損なわれる。
静電容量式力センサは、構造が単純であるので、エラストマーでセンサボディを作ることがある。センサボディをエラストマーで作った場合、大きな力に耐えることができないので強い力を検出する力センサを作ることが困難であり、また、センサボディが力により変形した際の復元性が悪いので、検出精度が良くない。エラストマーは温度による熱膨張が大きく、経年変化による形状変化、材質変化が大きいので、精度の良い力センサを実現するには無理がある。
そこで、本発明の目的は、構造が単純な静電容量式力センサであって、小さな力から大きな力まで対応でき、検出精度が良好で、温度変化に対して検出の安定性が良い、安価な力センサを提供することである。
本願の請求項1に記載の発明は、外部の装置または土台に取り付けて固定する固定部と、外部からの力が作用する物体を取り付ける荷重取付け部と、前記荷重取付け部に加わった力を伝達する荷重伝達部と、前記固定部と前記荷重伝達部の間に形成された弾性部と、前記固定部に取り付けられた固定板と、前記荷重伝達部の前記固定板に対する対向面に形成された変位電極と、前記固定板の前記荷重伝達部に対する対向面に形成された固定電極と、を備え、前記変位電極または前記固定電極のいずれか一方、あるいは双方は分割されて電気的に独立した3個以上の電極から成り、前記変位電極と前記固定電極から成る3個以上の容量素子を形成し、前記固定部、前記荷重伝達部、前記弾性部、および、前記固定板を、線膨張係数がほぼ等しい材料で構成し、前記3個以上の容量素子の静電容量を検出することにより1軸ないし複数軸方向の力成分とモーメント成分の少なくとも一方を検出するようにしたことを特徴とする静電容量式力センサである。
請求項2に係る発明は、前記荷重取付け部は、前記荷重伝達部の外側に張り出した鍔形状部を備え、該鍔形状部に取付け用の穴あるいはねじ穴を備えるようにしたことを特徴とする請求項1に記載の静電容量式力センサである。
請求項3に係る発明は、前記荷重伝達部と前記固定板のいずれか一方、あるいは双方を金属材料で構成し、該変位電極と該固定電極のどちらか一方を構成する金属材料で置き換えるようにしたことを特徴とする請求項1または請求項2に記載の静電容量式力センサである。
請求項3に係る発明は、前記荷重伝達部と前記固定板のいずれか一方、あるいは双方を金属材料で構成し、該変位電極と該固定電極のどちらか一方を構成する金属材料で置き換えるようにしたことを特徴とする請求項1または請求項2に記載の静電容量式力センサである。
本発明により、構造が単純な静電容量式力センサであって、小さな力から大きな力まで対応でき、検出精度が良好で、温度変化に対して検出の安定性が良い、安価な力センサを提供できる。
以下に、本発明の実施形態を図面を用いて説明する。
まず、第1の実施形態について図1により説明する。
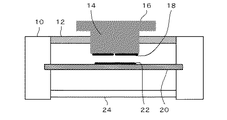
第1の実施形態の静電容量式力センサ1は、外部装置、例えばロボットアームなどに取り付けて固定する固定部10と、外部から力が加わる荷重機構、例えばチャックやロボットハンドなどを取り付ける荷重取付け部16と、荷重取付け部16につながっており加えられた力を伝達する荷重伝達部14を持つ。荷重伝達部14と固定部10の間に弾性部12が形成されており、外部から加わった力により弾性部12が弾性変形して荷重伝達部14が変位する。
まず、第1の実施形態について図1により説明する。
第1の実施形態の静電容量式力センサ1は、外部装置、例えばロボットアームなどに取り付けて固定する固定部10と、外部から力が加わる荷重機構、例えばチャックやロボットハンドなどを取り付ける荷重取付け部16と、荷重取付け部16につながっており加えられた力を伝達する荷重伝達部14を持つ。荷重伝達部14と固定部10の間に弾性部12が形成されており、外部から加わった力により弾性部12が弾性変形して荷重伝達部14が変位する。
弾性部12の特性は力センサの特性を決める上で非常に重要である。弾性部12の強度が大きいと変位が小さくなるので検出感度が低くなるが、大きな力が加わっても簡単には破損しない。逆に、弾性部12の強度が小さいと変位が大きくなるので検出感度は高くなるが、過大な力が加わると破損し易くなる。すなわち、弾性部12の強度を変えることによって様々な最大荷重に対応したセンサを実現することができる。弾性部12はダイアフラムと呼ばれる薄い板状の構造が一般的であるが、ダイアフラムの厚さを部分的に薄くしたり、蛇腹のようにうねった形状にしても良く、本発明ではその形状を特に限定するものではない。
固定部10、弾性部12、荷重伝達部14、および荷重取付け部16は、金属による一体構造が望ましい。一体構造であれば、同じ材質なので熱膨張収縮による変形が生じない。使用する金属の材質も重要である。高強度のスチールを使うと大きな力に対応できるが、縦弾性係数が高いので弾性部12の厚さを薄くしないと力が加わった際の変位を大きくできない。そのため弾性部12の加工に高い精度が必要となり、価格が上昇する。超ジュラルミンなどの高強度アルミ合金を使うと、縦弾性係数がスチールの約3分の1であるので、変位を大きく取ることができ、重量も軽くなるので、力センサとして望ましい特性が得られる。
固定部10に固定板20が取り付けられ、荷重伝達部14と固定板20の対向する面にそれぞれ変位電極18、固定電極22が形成されている。固定板20と固定部10の間に熱膨張差が発生すると固定板20にそり、撓みが発生し、電極間距離が変動するので、固定板20と固定部10を同じ材質にするか、線膨張係数がほぼ同じ材料にする必要がある。例えば、アルミ合金には様々な種類が存在するが、線膨張係数はどれもほぼ同じである。
そこで、固定部10、弾性部12、荷重伝達部14には強度の高い超ジュラルミンを使い、固定板20は特に力が加わらないので安価な一般のアルミ合金を使えば、熱膨張差による電極間距離の変動を防止できる。なお、蓋24は、固定板20を外部雰囲気から防護する部材であって、固定板20と同様にアルミ合金を使えば熱膨張収縮による影響を他の部材に及ぼさない。
図示しない検出回路は、変位電極18と固定電極22に電気接続し、電極間に形成された容量素子の静電容量を検出し、それから力とモーメント成分を算出して出力する。外部から加わった力により荷重伝達部14および変位電極18が変位し、それに対応して静電容量が変化するので、検出した静電容量により外部から加わった力の直線軸方向の力成分とその直線軸に直行する方向の軸方向の回りのモーメント成分を算出できる。
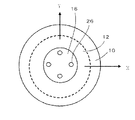
図2に、図1で示した静電容量式力センサ1の上面図を示す。静電容量式力センサ1の外形は円筒状になっており、荷重取付け部16の円の中心で交差する直交2軸を図示のようにX軸,Y軸とすると、Z軸は紙面に対し垂直方向となる。荷重取付け部16には取付け用ねじ穴26があり、荷重機構をボルトなどで取り付けるようになっている。静電容量式力センサ1を図示のように円筒形状にすると、固定部10、弾性部12、荷重伝達部14などは一体構造として、旋盤により精度良く容易に加工できる。また、円筒は中心軸に対して対称構造なので、X軸方向、Y軸方向の特性が等しく、高精度な静電容量式力センサを実現し易い。ただし、静電容量式力センサ1の外形は円筒に限定する必要はなく、上から見た形状が4角形などの多角形であっても良い。
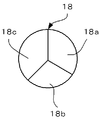
図3は固定電極22の形状を変位電極18側から見た図で、1個の電極で構成される。図4は変位電極18の形状を固定電極22側から見た図で、変位電極18は等分割された3個の電極18a,18b,18cで構成される。変位電極18は3分割されているので、3個の容量素子が形成される。静電容量は電極面積に比例し、隙間の距離に反比例するので、変位電極18が変位して隙間の距離が変わると静電容量が変化する。3個の静電容量を検出することにより、Z軸の直線方向の力成分とX軸、Y軸回りのモーメント成分を検出できる。固定電極22は1個で図示しているが、複数個に分割した電極であってもよい。変位電極18は3分割してあるが、4分割あるいはそれ以上に分割してもよい。さらに、中央に1個の電極を配置し周囲に分割した電極を配置してもよい。周囲にリング状に1個の電極を配置し、内側に複数に分割した電極を配置してもよい。要するに、電極の形状と分割数、配置は幾通りもの種類が可能である。また、固定電極22と変位電極18の形状を入れ替えてもよい。
荷重伝達部14と固定板20の構成部材が金属である場合、電極(変位電極18,固定電極22)は構成部材(荷重伝達部14ないし固定板20)と絶縁する必要がある。電極形成方法としては、検出回路と電気接続する必要があるので、電極をフレキシブルプリントサーキットで構成し、それを荷重伝達部14ないし固定板20に接着する方法が簡単で安価である。アルミ板の表面に絶縁層を形成しその上に電極を形成したアルミ基板を使用する方法もあり、アルミ基板を固定板20に使えば、電極が形成されているので便利である。
図3のように電極が1個の場合、薄い金属板を、絶縁シートをはさんで固定板20に接着するか、プラスティックねじを使ってねじ止めして、電極を形成することができる。このように、電極の形成には様々な方法が考えられ、本発明はこれらに関し特に限定するものではない。
図3のように電極が1個の場合、薄い金属板を、絶縁シートをはさんで固定板20に接着するか、プラスティックねじを使ってねじ止めして、電極を形成することができる。このように、電極の形成には様々な方法が考えられ、本発明はこれらに関し特に限定するものではない。
図5は、図1に示した力センサに直線軸(Z軸)に沿って力Fzが加わった図である。この場合、荷重伝達部14はZ軸方向に平行移動して変位するので、3分割電極による静電容量は3個とも同じように変化する。
図6は、図1に示した力センサにY軸回りにモーメントMyが加わった図である。この場合、荷重伝達部14はY軸回りに回転変位するので、3分割電極による静電容量は、それぞれ変化が異なる。Z軸方向力成分と、X軸回りモーメント、Y軸回りモーメントの合計3成分を求めるには、最低3個の静電容量の検出が必要である。3個以上の静電容量から力とモーメント3成分を求めるには、キャリブレーションと呼ぶ作業で変換行列を求めておき、この変換行列に静電容量を掛け合わせることで力とモーメント3成分を求めることができる。キャリブレーションでは、力とモーメント3成分が分かっている各種の力を力センサに加えて、検出したそれぞれの静電容量を記録し、この静電容量と加えた力とモーメント3成分との相関関係から変換行列を算術計算によって求める。これらの計算法は周知の数学的手法であり、詳細については説明を省略する。この方法では、入力変数となる静電容量は3個以上であれば良く、求められた変換行列は弾性部12の特性、電極の面積、形状、配置など力センサの特性を決める要因をすべて反映している。従って、本発明では、電極の個数が3個以上あること以外に、電極の個数や形状などは特に限定されない。
図7は、本発明の第2の実施形態による静電容量式力センサ1の側断面図である。この実施形態では、荷重取付け部16の構造が図1に示される第1の実施形態と異なっており、荷重伝達部14に対して外側に張り出した鍔形状になっている。
図8は上面図で、鍔形状部に取付け用ねじ穴26が形成されている。外部から力が加わる荷重機構、例えばロボットハンドなどを静電容量式力センサ1の荷重取付け部16にボルトで締結するが、ボルト締めによる強い圧縮応力がねじ穴周辺に発生する。特に静電容量式力センサ1をアルミ合金で構成した場合、アルミ合金の縦弾性係数はスチール製ボルトの約3分の1と小さいので、ボルトを締めるとねじ穴周辺部のアルミ合金が圧縮応力により大きくひずむ。図1の構造では、このひずみが荷重伝達部14に発生するため、そこに連結している弾性部12にもひずみが発生し、弾性係数が変化する。弾性部12の弾性係数は、外部から加わった力による荷重伝達部14の変位量を決める重要な要素であり、これが変化すると検出精度が悪化する。図7の構造にすることで、このひずみが鍔形状部分で吸収され、荷重伝達部14にはほとんどひずみが発生しないので弾性部12は影響を受けず、従って検出精度の悪化を防ぐことができる。
図9は、本発明の第3の実施形態による静電容量式力センサの側断面図である。この実施形態では、固定板20に固定電極22が無い点が図7に示す第2の実施形態と異なっている。静電容量の検出回路方式には、静電容量を形成する2個の電極ともグランド電位ではない両電極方式と、片方の電極をグランド電位にする片電極方式とがある。片電極方式を使うことにより、金属材料で構成した固定板20をグランド電位に接続すれば、固定電極22を特に設ける必要はない。一般的に、両電極方式は片電極方式に比べて誘導ノイズに強く、グランドに対する浮遊容量の影響を受けないので、検出感度と安定性が良い。しかし、片電極方式は、一方の電極の形成が不要となるので、力センサの構造が簡単化されて、安価にできる利点がある。
以上説明したように、本発明では、固定部と荷重伝達部の間に弾性部を設けており、外部から力を受けるとこの弾性部が弾性変形し荷重伝達部が変位するようになっている。弾性部は力センサの特性を決める重要な部分であり、弾性部を適切に設計することで、外部から加わる様々な大きさの力に対応できる。弾性部の強度を大きくすると、頑丈で壊れにくい力センサとなり、強度を小さくすると、検出感度が高い力センサになる。
周囲温度が変化すると力センサの構造部材が熱膨張収縮する。構成部材の間で熱膨張差があるとストレスが発生し、弾性部あるいは固定板に撓みが発生するので、固定電極と変位電極間の距離が変動し、力センサの検出値が変動する。これを防ぐために、固定部、弾性部、荷重伝達部は、同じ材質で一体構造にすることが望ましい。同様に、固定板を固定部と同じ材質にするか、線膨張係数がほぼ同じ材料を使うことにより、熱膨張差による固定板の撓みを防止して、電極間距離の変動を防止できる。
荷重取付け部には、ワークを把持するためのチャックやロボットハンドなどの荷重機構がボルトで締結される。このボルト締めによる強いストレスがねじ穴周辺に発生し、このストレスが荷重伝達部にひずみを発生させる。その影響で荷重伝達部に連結している弾性部にもひずみが発生するので、弾性部の弾性係数が変化し、検出精度が悪化する。荷重取付け部を帽子のつばのように荷重伝達部の外側に張り出して鍔形状にし、その部分にボルト締結用ねじ穴を設けると、ボルト締めによるストレスを鍔部分が吸収し、弾性部への影響を排除できるので、検出精度を良好に維持できる。
また、静電容量を検出する回路方式に片電極方式を使うことにより、力センサの構造部材を金属にしてそれをグランド電位に接続すれば、静電容量を形成する一方の電極をわざわざ設ける必要がなく、力センサを安価にできる。
10 固定部
12 弾性部
14 荷重伝達部
16 荷重取付け部
18 変位電極
20 固定板
22 固定電極
24 蓋
26 取付け用ねじ穴
12 弾性部
14 荷重伝達部
16 荷重取付け部
18 変位電極
20 固定板
22 固定電極
24 蓋
26 取付け用ねじ穴
本願の請求項1に係る発明は、外部の装置または土台に取り付けて固定する固定部と、外部からの力が作用する物体を取り付ける荷重取付け部と、前記荷重取付け部は、前記荷重伝達部の外側に張り出した鍔形状部を備え、該鍔形状部に取付け用の穴あるいはねじ穴を備え、前記荷重取付け部に加わった力を伝達する荷重伝達部と、前記固定部と前記荷重伝達部の間に形成された弾性部と、前記固定部、前記荷重取付け部、前記荷重伝達部、および前記弾性部は一体構造を成し、前記固定部に取り付けられた固定板と、前記荷重伝達部の前記固定板に対する対向面に形成された変位電極と、前記固定板の前記荷重伝達部に対する対向面に形成された固定電極と、を備え、前記変位電極または前記固定電極のいずれか一方、あるいは双方は分割されて電気的に独立した3個以上の電極から成り、前記変位電極と前記固定電極から成る3個以上の容量素子を形成し、前記固定部、前記荷重伝達部、前記弾性部、および、前記固定板を、線膨張係数がほぼ等しい材料で構成し、前記3個以上の容量素子の静電容量を検出することにより1軸ないし複数軸方向の力成分とモーメント成分の少なくとも一方を検出するようにしたことを特徴とする静電容量式力センサである。
請求項2に係る発明は、前記荷重伝達部と前記固定板のいずれか一方、あるいは双方を金属材料で構成し、該変位電極と該固定電極のどちらか一方を構成する金属材料で置き換えるようにしたことを特徴とする請求項1に記載の静電容量式力センサである。
Claims (3)
- 外部の装置または土台に取り付けて固定する固定部と、
外部からの力が作用する物体を取り付ける荷重取付け部と、
前記荷重取付け部に加わった力を伝達する荷重伝達部と、
前記固定部と前記荷重伝達部の間に形成された弾性部と、
前記固定部に取り付けられた固定板と、
前記荷重伝達部の前記固定板に対する対向面に形成された変位電極と、
前記固定板の前記荷重伝達部に対する対向面に形成された固定電極と、
を備え、
前記変位電極または前記固定電極のいずれか一方、あるいは双方は分割されて電気的に独立した3個以上の電極から成り、
前記変位電極と前記固定電極から成る3個以上の容量素子を形成し、
前記固定部、前記荷重伝達部、前記弾性部、および、前記固定板を、線膨張係数がほぼ等しい材料で構成し、
前記3個以上の容量素子の静電容量を検出することにより1軸ないし複数軸方向の力成分とモーメント成分の少なくとも一方を検出するようにしたことを特徴とする静電容量式力センサ。 - 前記荷重取付け部は、前記荷重伝達部の外側に張り出した鍔形状部を備え、該鍔形状部に取付け用の穴あるいはねじ穴を備えるようにしたことを特徴とする請求項1に記載の静電容量式力センサ。
- 前記荷重伝達部と前記固定板のいずれか一方、あるいは双方を金属材料で構成し、該変位電極と該固定電極のどちらか一方を構成する金属材料で置き換えるようにしたことを特徴とする請求項1または請求項2に記載の静電容量式力センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011005057A JP2012145497A (ja) | 2011-01-13 | 2011-01-13 | 静電容量式力センサ |
| US13/287,489 US20120180575A1 (en) | 2011-01-13 | 2011-11-02 | Capacitance-type force sensor |
| CN201110435901XA CN102589792A (zh) | 2011-01-13 | 2011-12-22 | 静电电容式力传感器 |
| DE102012100111A DE102012100111A1 (de) | 2011-01-13 | 2012-01-09 | Kapazitiver Kraftsensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011005057A JP2012145497A (ja) | 2011-01-13 | 2011-01-13 | 静電容量式力センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012145497A true JP2012145497A (ja) | 2012-08-02 |
Family
ID=46478746
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011005057A Pending JP2012145497A (ja) | 2011-01-13 | 2011-01-13 | 静電容量式力センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20120180575A1 (ja) |
| JP (1) | JP2012145497A (ja) |
| CN (1) | CN102589792A (ja) |
| DE (1) | DE102012100111A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015055473A (ja) * | 2013-09-10 | 2015-03-23 | 株式会社ワコー | 力覚センサ |
| JP2019512084A (ja) * | 2016-02-03 | 2019-05-09 | ハッチンソン テクノロジー インコーポレイテッドHutchinson Technology Incorporated | 一体型リードを備えた小型圧力・力センサ |
| JP2019095407A (ja) * | 2017-11-28 | 2019-06-20 | ファナック株式会社 | 変位検出方式の力検出構造及び力センサ |
| JP2019100702A (ja) * | 2017-11-28 | 2019-06-24 | ファナック株式会社 | 変位検出方式の6軸力センサ |
| JPWO2018042720A1 (ja) * | 2016-09-05 | 2019-06-24 | アルプスアルパイン株式会社 | 入力装置、要素データ構成方法及びプログラム |
| JP2020177114A (ja) * | 2019-04-17 | 2020-10-29 | 株式会社リコー | トナー量検出装置、トナー量検出方法、トナー量検出プログラム |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011022665A1 (en) | 2009-08-21 | 2011-02-24 | Regents Of The University Of Minnesota | Flexible sensors and related systems for determining forces applied to an object, such as a surgical instrument |
| JP5896114B2 (ja) * | 2011-10-31 | 2016-03-30 | セイコーエプソン株式会社 | 物理量検出デバイス、物理量検出器、および電子機器 |
| US9103738B2 (en) | 2012-09-07 | 2015-08-11 | Dynisco Instruments Llc | Capacitive pressure sensor with intrinsic temperature compensation |
| US9250144B2 (en) * | 2013-07-24 | 2016-02-02 | Ncr Corporation | Dual capacitor load cell |
| KR101452302B1 (ko) | 2013-07-29 | 2014-10-22 | 주식회사 하이딥 | 터치 센서 패널 |
| US10007380B2 (en) | 2013-07-29 | 2018-06-26 | Hideep Inc. | Touch input device with edge support member |
| KR101681305B1 (ko) | 2014-08-01 | 2016-12-02 | 주식회사 하이딥 | 터치 입력 장치 |
| US9705069B2 (en) * | 2013-10-31 | 2017-07-11 | Seiko Epson Corporation | Sensor device, force detecting device, robot, electronic component conveying apparatus, electronic component inspecting apparatus, and component machining apparatus |
| KR101712346B1 (ko) | 2014-09-19 | 2017-03-22 | 주식회사 하이딥 | 터치 입력 장치 |
| US9383283B2 (en) * | 2014-01-16 | 2016-07-05 | Sensata Technologies, Inc. | Pressure transducer with capacitively coupled source electrode |
| JP6527343B2 (ja) | 2014-08-01 | 2019-06-05 | 株式会社 ハイディープHiDeep Inc. | タッチ入力装置 |
| JP5845371B1 (ja) | 2014-09-19 | 2016-01-20 | 株式会社 ハイディープ | スマートフォン |
| US9903779B2 (en) * | 2015-02-09 | 2018-02-27 | Infineon Technologies Ag | Sensor network supporting self-calibration of pressure sensors |
| KR101583765B1 (ko) | 2015-07-27 | 2016-01-08 | 주식회사 하이딥 | 스마트폰 |
| CN205449348U (zh) * | 2015-12-24 | 2016-08-10 | 华为技术有限公司 | 传感器装置 |
| CN107515065A (zh) * | 2016-06-16 | 2017-12-26 | 中兴通讯股份有限公司 | 传感器及确定力方向的方法 |
| JP6342971B2 (ja) * | 2016-11-14 | 2018-06-13 | ファナック株式会社 | 力検出装置及びロボット |
| EP4701393A2 (en) | 2017-02-09 | 2026-02-25 | Nextinput, Inc. | Integrated digital force sensors and related methods of manufacture |
| US11243125B2 (en) | 2017-02-09 | 2022-02-08 | Nextinput, Inc. | Integrated piezoresistive and piezoelectric fusion force sensor |
| CN110446912B (zh) * | 2017-03-23 | 2021-07-20 | 松下知识产权经营株式会社 | 触觉传感器以及构成该触觉传感器的触觉传感器单元 |
| CN207280646U (zh) * | 2017-03-29 | 2018-04-27 | 广西大学 | 一种适用于力矩检测的差动式电容传感器 |
| CN107144378B (zh) * | 2017-06-07 | 2023-05-05 | 深圳信息职业技术学院 | Mems压力传感器 |
| US11243126B2 (en) | 2017-07-27 | 2022-02-08 | Nextinput, Inc. | Wafer bonded piezoresistive and piezoelectric force sensor and related methods of manufacture |
| JP6843726B2 (ja) | 2017-10-17 | 2021-03-17 | キヤノン株式会社 | 力覚センサ及びロボット |
| US11579028B2 (en) | 2017-10-17 | 2023-02-14 | Nextinput, Inc. | Temperature coefficient of offset compensation for force sensor and strain gauge |
| WO2019099821A1 (en) * | 2017-11-16 | 2019-05-23 | Nextinput, Inc. | Force attenuator for force sensor |
| CN107884100B (zh) * | 2017-11-23 | 2023-09-22 | 燕山大学 | 一种基于电容感知的集成微型六维力传感器 |
| CN109855774B (zh) * | 2019-01-23 | 2024-12-17 | 广西大学 | 一种分层的电容式多维力传感器 |
| JP7386445B2 (ja) * | 2019-08-27 | 2023-11-27 | パナソニックIpマネジメント株式会社 | 荷重センサ |
| CN113447170B (zh) * | 2020-03-26 | 2023-08-15 | 精量电子公司 | 力检测装置 |
| JP2023527179A (ja) * | 2020-06-28 | 2023-06-27 | シャンハイ・フレクシブ・ロボティクス・テクノロジー・カンパニー・リミテッド | 軸力センサアセンブリ、ロボットグリッパー及びロボット |
| CN111595505B (zh) * | 2020-06-28 | 2022-07-08 | 上海非夕机器人科技有限公司 | 轴向力传感器组件、机器人夹爪及机器人 |
| KR102483658B1 (ko) * | 2020-09-10 | 2023-01-03 | (주)비토넷에이피 | 정전용량 변화를 이용한 인체 끼임 방지 장치 |
| JP2022111488A (ja) * | 2021-01-20 | 2022-08-01 | 本田技研工業株式会社 | 静電容量センサ |
| JP7560031B2 (ja) * | 2021-01-20 | 2024-10-02 | 本田技研工業株式会社 | 3軸力センサ |
| CN113218558B (zh) * | 2021-05-08 | 2022-11-01 | 广西大学 | 一种电容式六维力传感器电容器极板位移计算方法 |
| JP7706931B2 (ja) * | 2021-05-11 | 2025-07-14 | キヤノン株式会社 | 力覚センサおよびそれを有するロボット |
| CN113432761A (zh) * | 2021-05-31 | 2021-09-24 | 杭州电子科技大学 | 带惯性环境补偿功能的机器人用触觉传感器及其制作方法 |
| US12558150B2 (en) | 2021-10-19 | 2026-02-24 | Verb Surgical Inc. | Integrated sensors for energy tools |
| US12433588B2 (en) * | 2021-10-19 | 2025-10-07 | Verb Surgical | Integrated sensors for surgical staplers |
| CN116007821B (zh) * | 2021-10-22 | 2025-12-05 | 华为技术有限公司 | 电容式力传感器、检测设备所承受外力的测量方法 |
| US20240310222A1 (en) * | 2023-03-17 | 2024-09-19 | Nils Aage Juul Eilersen | Load cell |
| CN120651088B (zh) * | 2025-08-14 | 2025-10-28 | 西安热工研究院有限公司 | 一种汽轮机用电容式缸体胀差测量装置 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0382928A (ja) * | 1989-08-25 | 1991-04-08 | Nitta Ind Corp | 力・モーメント検出装置 |
| JPH05312659A (ja) * | 1992-05-14 | 1993-11-22 | Nitta Ind Corp | 力及びモーメント検出用の起歪体 |
| JPH05346356A (ja) * | 1992-06-16 | 1993-12-27 | Kazuhiro Okada | 静電容量の変化を利用した物理量の検出装置 |
| JPH11258082A (ja) * | 1998-03-11 | 1999-09-24 | Yazaki Corp | 三軸力センサ |
| JP2000214003A (ja) * | 1999-01-27 | 2000-08-04 | Saginomiya Seisakusho Inc | 静電型ロ―ドセル |
| JP2000283833A (ja) * | 1999-03-30 | 2000-10-13 | Furukawa Electric Co Ltd:The | 座席用静電容量型重量センサ |
| JP2001133335A (ja) * | 1999-11-04 | 2001-05-18 | Akashi Corp | 力計および硬さ試験機 |
| JP2004301731A (ja) * | 2003-03-31 | 2004-10-28 | Wacoh Corp | 力検出装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4573362A (en) * | 1984-07-09 | 1986-03-04 | Eaton Corporation | Multi-axis load transducer |
| US5263375A (en) * | 1987-09-18 | 1993-11-23 | Wacoh Corporation | Contact detector using resistance elements and its application |
| FR2623284B1 (fr) * | 1987-11-13 | 1990-08-10 | Logabex | Capteur d'efforts spatiaux |
| JP2841240B2 (ja) | 1990-10-12 | 1998-12-24 | 株式会社ワコー | 力・加速度・磁気の検出装置 |
| US6314823B1 (en) * | 1991-09-20 | 2001-11-13 | Kazuhiro Okada | Force detector and acceleration detector and method of manufacturing the same |
| US5526700A (en) * | 1995-09-29 | 1996-06-18 | Akeel; Hadi A. | Six component force gage |
| JP3413464B2 (ja) | 1999-07-13 | 2003-06-03 | ニッタ株式会社 | 静電容量式力覚センサ |
| JP2000249609A (ja) * | 1999-03-01 | 2000-09-14 | Wakoo:Kk | 静電容量式センサ |
| US20090007696A1 (en) * | 2007-07-05 | 2009-01-08 | Nitta Corporation | Strain gauge type sensor |
-
2011
- 2011-01-13 JP JP2011005057A patent/JP2012145497A/ja active Pending
- 2011-11-02 US US13/287,489 patent/US20120180575A1/en not_active Abandoned
- 2011-12-22 CN CN201110435901XA patent/CN102589792A/zh active Pending
-
2012
- 2012-01-09 DE DE102012100111A patent/DE102012100111A1/de not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0382928A (ja) * | 1989-08-25 | 1991-04-08 | Nitta Ind Corp | 力・モーメント検出装置 |
| JPH05312659A (ja) * | 1992-05-14 | 1993-11-22 | Nitta Ind Corp | 力及びモーメント検出用の起歪体 |
| JPH05346356A (ja) * | 1992-06-16 | 1993-12-27 | Kazuhiro Okada | 静電容量の変化を利用した物理量の検出装置 |
| JPH11258082A (ja) * | 1998-03-11 | 1999-09-24 | Yazaki Corp | 三軸力センサ |
| JP2000214003A (ja) * | 1999-01-27 | 2000-08-04 | Saginomiya Seisakusho Inc | 静電型ロ―ドセル |
| JP2000283833A (ja) * | 1999-03-30 | 2000-10-13 | Furukawa Electric Co Ltd:The | 座席用静電容量型重量センサ |
| JP2001133335A (ja) * | 1999-11-04 | 2001-05-18 | Akashi Corp | 力計および硬さ試験機 |
| JP2004301731A (ja) * | 2003-03-31 | 2004-10-28 | Wacoh Corp | 力検出装置 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015055473A (ja) * | 2013-09-10 | 2015-03-23 | 株式会社ワコー | 力覚センサ |
| JP2022020787A (ja) * | 2016-02-03 | 2022-02-01 | ハッチンソン テクノロジー インコーポレイテッド | 一体型リードを備えた小型圧力・力センサ |
| JP2019512084A (ja) * | 2016-02-03 | 2019-05-09 | ハッチンソン テクノロジー インコーポレイテッドHutchinson Technology Incorporated | 一体型リードを備えた小型圧力・力センサ |
| US12216013B2 (en) | 2016-02-03 | 2025-02-04 | Hutchinson Technology Incorporated | Miniature pressure/force sensor with integrated leads |
| JP7429678B2 (ja) | 2016-02-03 | 2024-02-08 | ハッチンソン テクノロジー インコーポレイテッド | 一体型リードを備えた小型圧力・力センサ |
| US11867575B2 (en) | 2016-02-03 | 2024-01-09 | Hutchinson Technology Incorporated | Miniature pressure/force sensor with integrated leads |
| US11243127B2 (en) | 2016-02-03 | 2022-02-08 | Hutchinson Technology Incorporated | Miniature pressure/force sensor with integrated leads |
| JPWO2018042720A1 (ja) * | 2016-09-05 | 2019-06-24 | アルプスアルパイン株式会社 | 入力装置、要素データ構成方法及びプログラム |
| JP2019100702A (ja) * | 2017-11-28 | 2019-06-24 | ファナック株式会社 | 変位検出方式の6軸力センサ |
| US10760986B2 (en) | 2017-11-28 | 2020-09-01 | Fanuc Corporation | Displacement detection type six-axis force sensor |
| US10677672B2 (en) | 2017-11-28 | 2020-06-09 | Fanuc Corporation | Displacement detection type force-detection structure and displacement detection type force sensor |
| JP2019095407A (ja) * | 2017-11-28 | 2019-06-20 | ファナック株式会社 | 変位検出方式の力検出構造及び力センサ |
| JP2020177114A (ja) * | 2019-04-17 | 2020-10-29 | 株式会社リコー | トナー量検出装置、トナー量検出方法、トナー量検出プログラム |
| JP7205361B2 (ja) | 2019-04-17 | 2023-01-17 | 株式会社リコー | トナー量検出装置、トナー量検出方法、トナー量検出プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20120180575A1 (en) | 2012-07-19 |
| DE102012100111A1 (de) | 2012-08-23 |
| CN102589792A (zh) | 2012-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012145497A (ja) | 静電容量式力センサ | |
| KR102147064B1 (ko) | 새로운 6 차원 힘과 토크 센서 | |
| JP7022363B2 (ja) | 力検出装置およびロボットシステム | |
| US7594445B2 (en) | Force sensor | |
| JP6214072B1 (ja) | 力覚センサ | |
| US9200969B2 (en) | Force sensor | |
| CN116086658B (zh) | 力觉传感器 | |
| JP2019522186A (ja) | 小型の6軸力センサおよびトルクセンサ | |
| WO2018029866A1 (ja) | 力覚センサ | |
| US10677667B2 (en) | Component transducer and multi-component transducer using such component transducer as well as use of such multi-component transducer | |
| JP5117804B2 (ja) | 6軸力センサ | |
| JP6791529B1 (ja) | 力覚センサ | |
| JP7160375B2 (ja) | 力覚センサ | |
| JPH0772026A (ja) | 起歪体構造物およびこの起歪体構造物を用いた多軸力検出センサ | |
| JP7692863B2 (ja) | 力覚センサ | |
| JP2010230631A (ja) | 力検出装置 | |
| JP2013234975A (ja) | 力覚センサ | |
| JP4249735B2 (ja) | 力センサ | |
| CN103534562B (zh) | 力传感装置、特别是称重单元 | |
| JP7432976B1 (ja) | 力覚センサ | |
| JP7199131B2 (ja) | 力覚センサ | |
| JP2024013127A (ja) | 力覚センサ | |
| JP7703810B1 (ja) | 力覚センサ | |
| JP6364637B2 (ja) | 荷重変換器 | |
| JP7421255B1 (ja) | 力覚センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120710 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120801 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121002 |