JP2012159469A - 車両用画像認識装置 - Google Patents
車両用画像認識装置 Download PDFInfo
- Publication number
- JP2012159469A JP2012159469A JP2011021008A JP2011021008A JP2012159469A JP 2012159469 A JP2012159469 A JP 2012159469A JP 2011021008 A JP2011021008 A JP 2011021008A JP 2011021008 A JP2011021008 A JP 2011021008A JP 2012159469 A JP2012159469 A JP 2012159469A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- road marking
- monocular camera
- captured image
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Landscapes
- Measurement Of Optical Distance (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】測距対象までの距離を単眼カメラによる撮像画像からでも精度良く算出できる、車両用画像認識装置を提供すること。
【解決手段】単眼カメラ11と、単眼カメラ11による撮像画像から道路標示の所定部位を抽出する道路標示抽出部12と、前記所定部位の前記撮像画像上の左右方向の長さを検出する大きさ検出部13と、前記所定部位の実際の左右方向の長さと大きさ検出部13により検出された前記撮像画像上の左右方向の長さと単眼カメラ11の角度分解能とを用いて、前記道路標示までの距離を算出する距離算出部14とを備える、車両用画像認識装置。
【選択図】図1
【解決手段】単眼カメラ11と、単眼カメラ11による撮像画像から道路標示の所定部位を抽出する道路標示抽出部12と、前記所定部位の前記撮像画像上の左右方向の長さを検出する大きさ検出部13と、前記所定部位の実際の左右方向の長さと大きさ検出部13により検出された前記撮像画像上の左右方向の長さと単眼カメラ11の角度分解能とを用いて、前記道路標示までの距離を算出する距離算出部14とを備える、車両用画像認識装置。
【選択図】図1
Description
本発明は、単眼カメラを用いる車両用画像認識装置に関する。
従来技術として、カメラから供給された2つの連続画像に記録された障害物の縮小拡大比率に基づいて、その障害物に接触するまでの時間を算出する技術が知られている(例えば、特許文献1を参照)。
しかしながら、測距対象までの距離を単眼カメラによる撮像画像から算出する場合、その測距対象が遠方になるほど算出精度の確保が困難になる。
そこで、本発明は、測距対象までの距離を単眼カメラによる撮像画像からでも精度良く算出できる、車両用画像認識装置の提供を目的とする。
上記目的を達成するため、本発明に係る車両用画像認識装置は、
単眼カメラと、
前記単眼カメラによる撮像画像から道路標示の所定部位を抽出する抽出手段と、
前記所定部位の前記撮像画像上の大きさを検出する検出手段と、
前記所定部位の規格上の大きさと前記検出手段により検出された前記撮像画像上の大きさとを用いて、前記道路標示までの距離を算出する算出手段とを備えることを特徴とするものである。
単眼カメラと、
前記単眼カメラによる撮像画像から道路標示の所定部位を抽出する抽出手段と、
前記所定部位の前記撮像画像上の大きさを検出する検出手段と、
前記所定部位の規格上の大きさと前記検出手段により検出された前記撮像画像上の大きさとを用いて、前記道路標示までの距離を算出する算出手段とを備えることを特徴とするものである。
本発明によれば、測距対象までの距離を単眼カメラによる撮像画像からでも精度良く算出できる。
以下、図面を参照しながら、本発明を実施するための形態の説明を行う。図1は、本発明の一実施形態である車両用画像認識装置1の構成を示したブロック図である。車両用画像認識装置1は、車両に搭載され、単眼カメラ11と、道路標示抽出部12と、大きさ検出部13と、距離算出部14と、立体物抽出部15と、距離補正部16とを備えている。各部の機能の一部又は全部は、画像認識処理を実行するプロセッサやマイクロコンピュータ等によって実現可能である。
単眼カメラ11は、自車両周辺(例えば、自車両の進行方向)を所定の画角で撮像して、その撮像画像を出力する撮像手段である。自車両の進行方向は、前進方向でも、後進方向でもよい。単眼カメラ11は、CCD又はCMOS等の撮像素子を備えている。
道路標示抽出部12は、単眼カメラ11による撮像画像から道路標示の所定部位を抽出する手段である。道路標示抽出部12によって抽出される所定部位は、予め設計的に決められていて、道路標示の全体でも一部でもよい。
道路標示は、文字、記号又はそれらの組み合わせが路面上にペイント等によって標示されたものである。道路標示の大きさは、法令等で予め定められた寸法を基準としている。道路標示の具体例として、規制標示と指示標示が挙げられる。規制標示の具体例として、転回禁止マーク、最高速度マークなどが挙げられる。指示標示の具体例として、横断歩道、前方に横断歩道があることを示す菱形マーク、前方に優先道路があることを示す三角マーク、進行方向マークなどが挙げられる。
図2は、単眼カメラ11によって得られた自車両の進行方向の撮像画像21を示した図である。撮像画像21には、道路標示として、自車両の前方の進路上に標示された横断歩道25が含まれている。符号26は、消失点(無限遠点)を表す。図2の場合、道路標示抽出部12は、例えば、撮像画像21から、横断歩道25を構成する候補ラインp1〜p4を抽出する。撮像画像21は、左右方向のピクセル数がW、上下方向のピクセル数がHの画像である。
大きさ検出部13は、道路標示抽出部12によって抽出された道路標示の所定部位についての単眼カメラ11による撮像画像上の大きさ(好ましくは、横幅)を検出する手段である。大きさ検出部13は、例えば、道路標示の所定部位を構成するピクセル数を撮像画像から取得することで、その所定部位の撮像画像上の大きさを検出できる。
距離算出部14は、道路標示抽出部12によって抽出された道路標示の所定部位についての規格上の予め定められた大きさと、大きさ検出部13により実際に検出された大きさと、単眼カメラ11の角度分解能とに基づいて、自車両からその道路標示までの距離を算出する手段である。
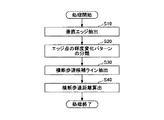
図3は、道路標示である横断歩道までの距離を算出するまでの処理例を示したフローチャートである。図2,4を参照しながら、本フローチャートについて説明する。
ステップS10において、道路標示抽出部12は、撮像画像21の画素輝度分布に基づいて、画素の輝度が急変する上下方向(垂直方向)のエッジを撮像画像21の中から抽出する。
ステップS20において、道路標示抽出部12は、ステップS10で抽出したエッジを、水平方向(自車両から横断歩道を見たときの左右方向)の輝度変化パターンによって分類する。道路標示抽出部12は、各エッジの左領域及び右領域の画素輝度分布に基づいて、左領域が右領域よりも暗い場合には「立ち上がりエッジ」と判定し、左領域が右領域よりも明るい場合には「立ち下がりエッジ」と判定する。
ステップS30において、道路標示抽出部12は、撮像画像21を水平方向にサーチして、ステップS20で分類したエッジが所定回数以上交互に繰り返し出現するラインを、横断歩道25を構成する候補ラインとしてグルーピングする。そして、道路標示抽出部12は、撮像画像21を垂直方向にサーチして、グルーピングされた各候補ラインの隣接関係、及び候補ラインを構成するエッジの接続関係によって、各候補ラインをグルーピングして横断歩道領域を抽出する。
例えば、道路標示抽出部12は、互いに隣り合う立ち上がりエッジと立ち下がりエッジを1ペアとして、所定数以上のペア(例えば、3ペア以上)が存在し、且つ、それらの所定数以上のペアについて各ペアを構成する2つのエッジ間の水平方向(左右方向)の距離(例えば図4の場合、距離b1,b2,b3)がそれぞれ所定の範囲内にあるとき、それらの各ペアを、横断歩道25を構成する候補ラインとして抽出し、それらの抽出された複数の候補ラインを横断歩道領域としてグルーピングする。
ステップS40において、大きさ検出部13は、横断歩道領域の左右方向のピクセル数(幅)を検出し、距離算出部14は、その検出された左右方向のピクセル数を用いて、自車両の単眼カメラ11から横断歩道25までの距離を算出する。
図4は、図2の撮像画像21上の横断歩道25を説明するための図である。道路標示抽出部12によって横断歩道領域として抽出されたペアの中で、大きさ検出部13は、例えば、最も左側のペアの立ち上がりエッジp1aから、左から3番目のペアの立ち下がりエッジp3bまでの距離に相当する3ペア分のピクセル幅aを検出する。横断歩道25の規格上のその3ペア分の両端間の幅長(すなわち、ピクセル幅aの部分に対応する部位の規格上求められる値)をAとし、単眼カメラ11の左右方向の角度分解能をPとし、自車両から横断歩道25までの距離をLとすると、図5から明らかなように、
L=A/tan(a×P) ・・・(1)
という関係式が成り立つ。ここで、角度分解能Pは、単眼カメラ11の左右方向の画角をα[度]、単眼カメラ11によって得られる撮像画像21の左右方向のピクセル数をW[pix.]とすると、「P=α/W[度/pix.]」によって表すことが可能な固定値である。つまり、距離算出部14は、式(1)に基づいて、横断歩道25までの距離Lを算出することができる。
L=A/tan(a×P) ・・・(1)
という関係式が成り立つ。ここで、角度分解能Pは、単眼カメラ11の左右方向の画角をα[度]、単眼カメラ11によって得られる撮像画像21の左右方向のピクセル数をW[pix.]とすると、「P=α/W[度/pix.]」によって表すことが可能な固定値である。つまり、距離算出部14は、式(1)に基づいて、横断歩道25までの距離Lを算出することができる。
もちろん、横断歩道領域として抽出されたペアのエッジであれば、どのエッジ間のピクセル幅を検出してもよく、その検出されたピクセル幅をaとした場合、ピクセル幅aの部分に対応する部位の規格値が固定値Aに相当する。
したがって、車両用画像認識装置1は、上記構成の、単眼カメラ11、道路標示抽出部12、大きさ検出部13及び距離算出部14を備えていることにより、横断歩道等の道路標示の所定部位の規格上の大きさを加味して、道路標示までの距離を算出しているので、道路標示が自車両から遠方に存在する状況であっても、道路標示までの距離を単眼カメラによる撮像画像から精度良く算出できる。
図6は、一般道路環境下の実シーンにおける横断歩道までの距離の算出結果であって、(a)は、本発明の実施例を示し、(b)は、測距点の画像上の上下方向の位置を表す縦座標とその測距点までの距離との対応関係に基づいて、画像上の横断歩道領域の最下端の縦座標から横断歩道までの距離を算出する従来技術の場合の比較例を示している。図6から明らかなように、本発明の実施例の方が、上下方向の位置を表す縦座標を基準に距離を算出する従来技術に比べて、自車両のピッチ変動や道路勾配変化などの外乱の影響を受けにくいため、横断歩道までの距離の真値に対してずれが小さく、精度良く距離を算出できることがわかる。
ところで、道路標示の所定部位の大きさの規格値には、ある程度の許容公差が認められている。例えば、横断歩道の一つの白線領域(すなわち、ある一つのペアの立ち上がりエッジと立ち下がりエッジとに挟まれた高輝度領域)の規格値は45cm〜50cmであり、地域等によってその規格の範囲内で採用している値に差があるのが現状である。
このような差を吸収するため、道路標示の所定部位が撮像画像上の上下方向で所定の位置にあるときの当該所定部位の撮像画像上の大きさ(例えば、左右方向の長さ)を用いて、その所定部位の大きさの規格値をキャリブレーションした値(キャリブレーション値)を算出する。このようなキャリブレーション値を次回以降の距離算出に用いることによって、その算出精度を向上させることができる。例えば、画像上で所定の位置にあるときの横断歩道の白線領域を構成するピクセル幅fを用いて、その白線領域の大きさの規格値Fについてのキャリブレーション値F1を算出し、次回以降の距離算出に用いる。
図11は、横断歩道の白線領域の大きさの規格値Fのキャリブレーション例を示したフローチャートである。図12のように、抽出された横断歩道領域(一点鎖線で囲まれた領域)の画像上の最下端の位置がYa(撮像画像21の最下位又はそれよりわずかに上側の位置の縦座標)の位置にあるときに(ステップS50)、大きさ検出部13は、白線領域を構成するピクセル幅fを検出する(ステップS60)。自車両が横断歩道に近づくほど、規格値Fが最大値のときに検出されるピクセル幅fと規格値Fが最小値のときに検出されるピクセル幅fとの差分(ピクセル数の差)は大きくなり、また、道路勾配の影響を受けにくくなる。そこで、Yaの位置での白線領域のピクセル幅fを用いてキャリブレーションを行うことによって、そのキャリブレーションの効果を高めることができ、ひいては距離精度を高めることができる。
白線領域を構成するピクセル幅fを検出するには、具体的には、道路標示抽出部12によって抽出された一つのペアの立ち上がりエッジと立ち下がりエッジのピクセル数を計測すればよい。Yaの位置での白線領域のピクセル幅をf,単眼カメラ11の路面からの取り付け高さをHc,消失点26のY座標をYv,単眼カメラ11の左右方向の角度分解能をPとし、単眼カメラ11の上下方向の角度分解能をQとし、白線領域の左右方向の規格値Fのキャリブレーション値をF1とすると、
F1=Hc×tan(f×P)/tan((Ya−Yv)×Q) ・・・(2)
という関係式が成り立つ。ここで、角度分解能Qは、上述の角度分解能Pと同様に考えることができる。すなわち、角度分解能Qは、単眼カメラ11の上下方向の画角をβ[度]、単眼カメラ11によって得られる撮像画像の上下方向のピクセル数をH[pix.]とすると、「Q=β/H[度/pix.]」によって表すことが可能な固定値である。つまり、距離算出部14は、式(2)に基づいて、白線領域の規格値Fのキャリブレーション値F1を算出することができる。
F1=Hc×tan(f×P)/tan((Ya−Yv)×Q) ・・・(2)
という関係式が成り立つ。ここで、角度分解能Qは、上述の角度分解能Pと同様に考えることができる。すなわち、角度分解能Qは、単眼カメラ11の上下方向の画角をβ[度]、単眼カメラ11によって得られる撮像画像の上下方向のピクセル数をH[pix.]とすると、「Q=β/H[度/pix.]」によって表すことが可能な固定値である。つまり、距離算出部14は、式(2)に基づいて、白線領域の規格値Fのキャリブレーション値F1を算出することができる。
距離算出部14は、白線領域の大きさの規格値としてメモリに記憶されている値を、上述のように算出されたキャリブレーション値F1に、更新する(ステップS70)。過去の複数のキャリブレーション値F1の履歴に基づいて平均された値に、白線領域の規格値を更新してもよい。距離算出部14は、キャリブレーション値F1に基づいて算出された幅長Aを式(1)に代入することによって、横断歩道25までの距離Lを正確に算出できる。
ところで、図1に示されるように、本発明の好適な実施形態として、車両用画像認識装置1は、測距対象(立体物)までの距離を計測する計測手段として、立体物抽出部15及び距離補正部16を更に備えていてもよい。
立体物抽出部15は、自車両の進行方面に存在する道路標示近辺(例えば、道路標示が標示された道路上又はその道路脇)に存在する立体物を、単眼カメラ11によって得られた撮像画像から、テンプレートマッチング等のパターン認識により抽出する手段である。この立体物の具体例として、歩行者、先行車両・駐車車両などの他車両、自車両と衝突するおそれのある障害物(歩行者等を含む)などが挙げられる。
立体物抽出部15は、抽出された立体物の撮像画像上の縦方向位置を表す縦座標を実測する。立体物抽出部15は、例えば、図2に示されるように、歩行者22の最下位の撮像画像21上の縦座標Ypを実測する。
距離補正部16は、立体物までの距離を計測する後述の方法とは別の方法で距離が測定された道路標示によって、立体物までの距離の補正をして、その補正値を算出するものである。この別の方法とは、例えば、距離算出部14で実行される上述の距離算出方法である。
図7は、測距対象である歩行者までの距離を算出するまでの処理例を示したフローチャートである。図2,8〜10を参照しながら、本フローチャートについて説明する。
ステップS80の横断歩道25の領域検出と、ステップS90の横断歩道25までの距離Lの算出は、上記同様である。
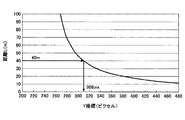
ステップS100において、道路標示抽出部12は、距離算出部14によって上記の式(1)に基づいて算出された距離Lに対応する撮像画像21上での縦方向位置を表す縦座標Yoを算出する。単眼カメラ11の路面からの取り付け高さをHc,消失点26のY座標をYv,単眼カメラ11の左右方向の角度分解能をPとし、単眼カメラ11の上下方向の角度分解能をQとすると、図8から明らかなように、
Yo=Yv+(tan-1(Hc/L))/Q ・・・(3)
という関係式が成立する。ここで、角度分解能Qは、上述の角度分解能Pと同様に考えることができる。すなわち、角度分解能Qは、単眼カメラ11の上下方向の画角をβ[度]、単眼カメラ11によって得られる撮像画像の上下方向のピクセル数をH[pix.]とすると、「Q=β/H[度/pix.]」によって表すことが可能な固定値である。つまり、道路標示抽出部12は、式(3)に基づいて、縦座標Yoを算出することができる。
Yo=Yv+(tan-1(Hc/L))/Q ・・・(3)
という関係式が成立する。ここで、角度分解能Qは、上述の角度分解能Pと同様に考えることができる。すなわち、角度分解能Qは、単眼カメラ11の上下方向の画角をβ[度]、単眼カメラ11によって得られる撮像画像の上下方向のピクセル数をH[pix.]とすると、「Q=β/H[度/pix.]」によって表すことが可能な固定値である。つまり、道路標示抽出部12は、式(3)に基づいて、縦座標Yoを算出することができる。
図9は、式(3)を表したグラフである(Q=0.027,Yv=240,Hc=1.28)。例えば、距離算出部14によって算出された横断歩道25までの距離Lが40mであるときの縦座標Yoは308ピクセルとなる。
ステップS110において、道路標示抽出部12は、横断歩道25の撮像画像21上での上下動に基づいて、自車両のピッチ変動量を算出する。すなわち、道路標示抽出部12は、まず、抽出された横断歩道25の撮像画像21上の縦方向位置を表す縦座標を実測する。道路標示抽出部12は、例えば、図2に示されるように、横断歩道25の最下端の撮像画像21上の縦座標Ycを実測する。そして、道路標示抽出部12は、縦座標Yoと縦座標Ycとの差分ΔYを算出する。この差分ΔYが、自車両のピッチ変動量に相当する。実測された縦座標Ycが例えば280ピクセルであれば、縦座標Yoが308ピクセルのとき、差分ΔYは「308−280=+28」ピクセルとなる。
ステップS120において、距離補正部16は、歩行者22までの距離を算出する。すなわち、距離補正部16は、立体物抽出部15によって実測された歩行者22の最下端の撮像画像21上の縦座標Ypに差分ΔYを加算した座標を用いて、自車両から歩行者22までの距離Dpを算出する。距離Dpの算出式を得るためには、式(3)の逆関数を考えればよいので、
Dp=Hc/(tan(Yp+ΔY−Yv)×Q) ・・・(4)
という算出式が成立する。
Dp=Hc/(tan(Yp+ΔY−Yv)×Q) ・・・(4)
という算出式が成立する。
図10は、式(4)に基づく距離補正部16の距離補正結果の一例を示した図である。立体物抽出部15によって実測された歩行者22の最下端の撮像画像21上の縦座標Ypを補正せずに、縦座標Ypと被写体までの距離との予め定められた対応関係に基づいて歩行者22までの距離を算出した場合、車両のピッチ変動等の影響を強く受けることにより、縦座標Ypの実測値が252ピクセルのとき、歩行者22までの距離は226mになる。これに対して、式(4)に基づいて算出した場合、歩行者22までの距離Dpは68mになり、歩行者22までの距離を精度良く算出できる。
なお、ピッチ変動量Dは、
D=Q×ΔY ・・・(5)
によって近似的に求めることができる。この場合、Dが正の値のとき、自車両が上向きにピッチ変動していることを示し、Dが負の値のとき、自車両が下向きにピッチ変動していることを示す。
D=Q×ΔY ・・・(5)
によって近似的に求めることができる。この場合、Dが正の値のとき、自車両が上向きにピッチ変動していることを示し、Dが負の値のとき、自車両が下向きにピッチ変動していることを示す。
したがって、車両用画像認識装置1は、上記構成の、立体物抽出部15及び距離補正部16を備えていることにより、横断歩道等の道路標示の所定部位の規格上の大きさを加味して、歩行者等の立体物までの距離を算出しているので、立体物が自車両から遠方に存在する状況であっても、立体物までの距離を単眼カメラによる撮像画像から精度良く算出できる。
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
例えば、上述の実施形態では、測距対象(立体物)までの距離を計測する計測手段として、立体物抽出部15及び距離補正部16を挙げた。しかしながら、立体物までの距離を計測する方法は複数存在し、本発明は、その距離計測の具体的方法を特に限定しなくてもよい。
具体的には、上述の実施形態では、単眼カメラ11の撮像画像から立体物までの距離を計測する計測手段の例を示したが、例えばステレオカメラ又はレーザーレーダーを用いて立体物までの距離を計測する計測手段でもよい。
レーザーレーダーは、横方向(車幅方向)及び縦方向(高さ方向)をスキャン可能なものを用いると好適である。レーザーレーダーの具体例として、ミリ波レーダーが挙げられる。レーザーレーダーから照射された電波が立体物上の各点で反射することにより、各反射点までの距離が測定される。同一距離として探知された測距点の集まりが、自車両の進行方面に存在する立体物として、その立体物までの距離が測定される。
1 車両用画像認識装置
11 単眼カメラ
12 道路標示抽出部
13 大きさ検出部
14 距離算出部
15 立体物抽出部
16 距離補正部
21 撮像画像
22 歩行者
25 横断歩道
26 消失点(無限遠点)
p1〜p4 候補ライン
11 単眼カメラ
12 道路標示抽出部
13 大きさ検出部
14 距離算出部
15 立体物抽出部
16 距離補正部
21 撮像画像
22 歩行者
25 横断歩道
26 消失点(無限遠点)
p1〜p4 候補ライン
Claims (6)
- 単眼カメラと、
前記単眼カメラによる撮像画像から道路標示の所定部位を抽出する抽出手段と、
前記所定部位の前記撮像画像上の大きさを検出する検出手段と、
前記所定部位の規格上の大きさと前記検出手段により検出された前記撮像画像上の大きさとを用いて、前記道路標示までの距離を算出する算出手段とを備える、車両用画像認識装置。 - 前記所定部位の規格上の大きさと前記検出手段により検出された前記撮像画像上の大きさが、自車両から前記道路標示を見たときの左右方向の長さである、請求項1に記載の車両用画像認識装置。
- 前記所定部位の規格上の左右方向の長さをA,前記検出手段により検出された前記撮像画像上の左右方向の長さをa,前記単眼カメラの角度分解能をP,前記道路標示までの距離をLとすると、
前記算出手段は、
L=A/tan(a×P)
に基づいて、前記道路標示までの距離を算出する、請求項2に記載の車両用画像認識装置。 - 前記道路標示近辺の立体物までの距離を計測する計測手段を備え、
前記計測手段は、
前記算出手段によって算出された前記道路標示までの距離によって、前記立体物までの距離の補正をする、請求項1から3のいずれか一項に記載の車両用画像認識装置。 - 前記立体物までの距離は、前記撮像画像に基づいて計測されたものである、請求項4に記載の車両用画像認識装置。
- 前記道路標示は、横断歩道又は菱形マークである、請求項1から5のいずれか一項に記載の車両用画像認識装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011021008A JP2012159469A (ja) | 2011-02-02 | 2011-02-02 | 車両用画像認識装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011021008A JP2012159469A (ja) | 2011-02-02 | 2011-02-02 | 車両用画像認識装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012159469A true JP2012159469A (ja) | 2012-08-23 |
Family
ID=46840116
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011021008A Withdrawn JP2012159469A (ja) | 2011-02-02 | 2011-02-02 | 車両用画像認識装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012159469A (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014196963A (ja) * | 2013-03-29 | 2014-10-16 | 日本信号株式会社 | 距離画像処理システム |
| JP2015206797A (ja) * | 2012-11-22 | 2015-11-19 | 株式会社デンソー | 物標検出装置 |
| US9626866B2 (en) | 2014-08-12 | 2017-04-18 | Continental Automotive Systems, Inc. | Active warning system using the detection of driver awareness of traffic signs |
| US9798002B2 (en) | 2012-11-22 | 2017-10-24 | Denso Corporation | Object detection apparatus |
| US10586348B2 (en) | 2016-08-30 | 2020-03-10 | Canon Kabushiki Kaisha | Distance measurement device and image capturing control device |
| CN113091693A (zh) * | 2021-04-09 | 2021-07-09 | 天津大学 | 一种基于图像超分辨率技术的单目视觉长程测距方法 |
| EP3923184A2 (en) * | 2021-03-25 | 2021-12-15 | Apollo Intelligent Connectivity (Beijing) Technology Co., Ltd. | Method and system for vehicle parking detection, electronic device and storage medium |
| CN114459423A (zh) * | 2022-01-24 | 2022-05-10 | 长江大学 | 一种单目测算航行船舶的距离的方法 |
| US11378974B2 (en) | 2017-07-24 | 2022-07-05 | Fujitsu Limited | Information processing device and recording medium recording vehicle parking support program |
| JP2023108510A (ja) * | 2022-01-25 | 2023-08-04 | トヨタ自動車株式会社 | 交通標識認識装置及び交通標識認識方法 |
-
2011
- 2011-02-02 JP JP2011021008A patent/JP2012159469A/ja not_active Withdrawn
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015206797A (ja) * | 2012-11-22 | 2015-11-19 | 株式会社デンソー | 物標検出装置 |
| US9798002B2 (en) | 2012-11-22 | 2017-10-24 | Denso Corporation | Object detection apparatus |
| JP2014196963A (ja) * | 2013-03-29 | 2014-10-16 | 日本信号株式会社 | 距離画像処理システム |
| US9626866B2 (en) | 2014-08-12 | 2017-04-18 | Continental Automotive Systems, Inc. | Active warning system using the detection of driver awareness of traffic signs |
| US10586348B2 (en) | 2016-08-30 | 2020-03-10 | Canon Kabushiki Kaisha | Distance measurement device and image capturing control device |
| US11378974B2 (en) | 2017-07-24 | 2022-07-05 | Fujitsu Limited | Information processing device and recording medium recording vehicle parking support program |
| EP3923184A2 (en) * | 2021-03-25 | 2021-12-15 | Apollo Intelligent Connectivity (Beijing) Technology Co., Ltd. | Method and system for vehicle parking detection, electronic device and storage medium |
| JP2022043238A (ja) * | 2021-03-25 | 2022-03-15 | 阿波▲羅▼智▲聯▼(北京)科技有限公司 | 車両駐車検出方法、システム、電子機器及び記憶媒体 |
| CN113091693A (zh) * | 2021-04-09 | 2021-07-09 | 天津大学 | 一种基于图像超分辨率技术的单目视觉长程测距方法 |
| CN113091693B (zh) * | 2021-04-09 | 2022-08-05 | 天津大学 | 一种基于图像超分辨率技术的单目视觉长程测距方法 |
| CN114459423A (zh) * | 2022-01-24 | 2022-05-10 | 长江大学 | 一种单目测算航行船舶的距离的方法 |
| JP2023108510A (ja) * | 2022-01-25 | 2023-08-04 | トヨタ自動車株式会社 | 交通標識認識装置及び交通標識認識方法 |
| JP7690408B2 (ja) | 2022-01-25 | 2025-06-10 | トヨタ自動車株式会社 | 交通標識認識装置及び交通標識認識方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012159469A (ja) | 車両用画像認識装置 | |
| JP5804185B2 (ja) | 移動物体位置姿勢推定装置及び移動物体位置姿勢推定方法 | |
| EP2958054B1 (en) | Hazard detection in a scene with moving shadows | |
| JP5783243B2 (ja) | 周期的静止物検出装置及び周期的静止物検出方法 | |
| US9740943B2 (en) | Three-dimensional object detection device | |
| JP5834933B2 (ja) | 車両位置算出装置 | |
| JP6560355B2 (ja) | ランドマーク認識装置及び認識方法 | |
| WO2015053100A1 (ja) | 物体検出装置及びそれを用いた車両 | |
| JP5310027B2 (ja) | 車線認識装置、及び車線認識方法 | |
| JP5548212B2 (ja) | 横断歩道標示検出方法および横断歩道標示検出装置 | |
| US20160012283A1 (en) | Stereoscopic Camera Apparatus | |
| JP2013186663A (ja) | 横断歩道認識装置および横断歩道認識方法 | |
| JP2012159470A (ja) | 車両用画像認識装置 | |
| JP6561670B2 (ja) | 段差検出装置及び段差検出方法 | |
| JP2013186664A (ja) | 横断歩道認識装置および横断歩道認識方法 | |
| CN113903103B (zh) | 局部图像生成装置、局部图像生成方法以及存储介质 | |
| US20200193184A1 (en) | Image processing device and image processing method | |
| JP5091897B2 (ja) | 停止線検出装置 | |
| JP6044084B2 (ja) | 移動物体位置姿勢推定装置及び方法 | |
| JP6477340B2 (ja) | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 | |
| JP2012252501A (ja) | 走行路認識装置及び走行路認識用プログラム | |
| JP7043787B2 (ja) | 対象物検知システム | |
| JP2013161190A (ja) | 物体認識装置 | |
| JP2016162130A (ja) | 横断歩道検出装置、横断歩道検出方法及び横断歩道検出用コンピュータプログラム | |
| JP6287683B2 (ja) | 道路曲率検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |