JP6477340B2 - 道路境界検出装置、自己位置推定装置及び道路境界検出方法 - Google Patents
道路境界検出装置、自己位置推定装置及び道路境界検出方法 Download PDFInfo
- Publication number
- JP6477340B2 JP6477340B2 JP2015153852A JP2015153852A JP6477340B2 JP 6477340 B2 JP6477340 B2 JP 6477340B2 JP 2015153852 A JP2015153852 A JP 2015153852A JP 2015153852 A JP2015153852 A JP 2015153852A JP 6477340 B2 JP6477340 B2 JP 6477340B2
- Authority
- JP
- Japan
- Prior art keywords
- boundary
- road
- slope
- road surface
- boundary detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
次に、図面を参照して、本発明の実施の形態を詳細に説明する。
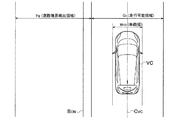
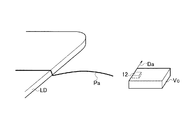
測距センサ12としてのステレオカメラを、車両(Vc)の前部ではなく、図11に示すように、車両(Vc)の側部に設置し、ステレオカメラの撮像範囲を車両(Vc)の側方としても構わない。この場合も、車両(Vc)の進行方向を第1の所定方向(Da)とする。これにより、段差判定位置回路15は、車両の周囲(側方)の路面に、段差(LD)と交わる線状の段差判定位置(Pa)を設定することができる。具体的には、測距センサ12から第1の所定方向(Da)に所定距離だけ離れ、第1の所定方向(Da)に直交する方向に延びる段差判定位置(Pa)を設定することができる。
測距センサ12の他の例として、レーザレンジファインダ(LRF)がある。LRFは、車両周囲の物体に向けてレーザーを照射し、物体に反射して戻ってきたレーザーを観測する。そして、LRFは、レーザーの照射方向に基づいて物体が位置する方位を計測すると共に、レーザーの照射から反射レーザーの観測までの時間に基づいて物体までの距離を計測する。LRFは、レーザースキャナとも呼ばれる。LRFの照射範囲は任意に設定可能である。図12は、車両(Vc)のルーフ中央部にLRF(12)を設定し、周囲全体を照射範囲とする360度LRFの例を示す。段差判定位置回路15は、測距センサ12から第1の所定方向(Da)に所定距離だけ離れ、第1の所定方向(Da)に直交する方向に延びる段差判定位置(Pa)を設定する。よって、車両(Vc)の前部に測距センサ12を設置した図2の例と同様にして、車両(Vc)の進行方向を第1の所定方向(Da)とするので、車幅方向に延びる段差判定位置(Pa)が、車両(Vc)の前方に設定される。
図14を参照して、第2実施形態に係わる自己位置推定装置2の全体構成を説明する。自己位置推定装置2は、第1実施形態の道路境界検出装置1により検出された道路境界と、地図情報に含まれる道路境界を示す情報とを照合することにより、車両(Vc)の地図上の位置を推定する。
2 自己位置推定装置
11 測距部
12 測距センサ
13 マイクロコンピュータ
14 演算回路
15 段差判定位置回路
18 段差検出回路
19 スロープ境界検出回路
20 道路境界推定回路
21 地図情報取得回路
22 自己位置推定回路
23 地図データベース
G1 走行可能領域
Froad 路面
Hg 道路境界検出領域(所定範囲)
Pa 段差判定位置
LD 段差
Vc 車両
Claims (8)
- 車両の周囲における路面の高さを検出する測距部と、
前記路面の高さ変化に基づいて、路面上の段差を検出する段差検出回路と、
前記路面の車幅方向の所定範囲において前記段差が検出されなかった場合、路面の車幅方向の勾配に基づいて、スロープと車道との境界を検出するスロープ境界検出回路と、
前記スロープと車道との境界或いは前記段差を道路境界と推定する道路境界推定回路と、
を備えることを特徴とする道路境界検出装置。 - 前記スロープ境界検出回路は、前記所定範囲の両端から前記路面の車幅方向の勾配をそれぞれ走査し、前記勾配が交差する位置から、前記スロープと車道との境界の位置を検出することを特徴とする請求項1に記載の道路境界検出装置。
- 前記段差検出回路は、前記路面上の段差の位置を繰り返し検出し、
前記スロープ境界検出回路は、前回検出した前記路面上の段差の位置に基づいて、前記所定範囲を設定する
ことを特徴とする請求項1又は2に記載の道路境界検出装置。 - 前記スロープ境界検出回路は、前記車両が走行する一定区間において、前記路面上の段差が検出されなかった場合に、前記スロープと車道との境界を検出することを特徴とする請求項1〜3のいずれか一項に記載の道路境界検出装置。
- 前記スロープ境界検出回路は、前記所定範囲において、前記路面の車幅方向の勾配が基準値よりも大きく変化する箇所を前記スロープと前記車道との境界として検出することを特徴とする請求項1〜4のいずれか一項に記載の道路境界検出装置。
- 前記スロープ境界検出回路は、前記所定範囲において、前記路面の車幅方向の勾配の符号が反転する箇所を前記スロープと前記車道との境界として検出することを特徴とする請求項1〜4のいずれか一項に記載の道路境界検出装置。
- 請求項1〜6のいずれか一項に記載の道路境界検出装置と、
車両周囲の地図情報を取得する地図情報取得回路と、
前記地図情報に含まれる前記道路境界を示す情報と、前記道路境界推定回路により推定された前記道路境界とを照合することにより、前記車両の地図上の位置を推定する自己位置推定回路と、を備え、
前記道路境界推定回路は、前記路面の車幅方向の所定範囲外で前記段差が検出され、且つ前記スロープと前記車道との境界が検出されなかった場合、前記所定範囲外で検出された前記段差を、前記道路境界の推定に含めない
ことを特徴とする自己位置推定装置。 - 車両の周囲における路面の高さを検出し、
前記路面の高さ変化に基づいて、路面上の段差を検出し、
前記路面の車幅方向上の所定範囲において前記段差が検出されなかった場合、路面の車幅方向の勾配に基づいて、スロープと車道との境界を検出し、
前記スロープと車道との境界或いは前記段差を道路境界と推定する
ことを特徴とする道路境界検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015153852A JP6477340B2 (ja) | 2015-08-04 | 2015-08-04 | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015153852A JP6477340B2 (ja) | 2015-08-04 | 2015-08-04 | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017033366A JP2017033366A (ja) | 2017-02-09 |
| JP6477340B2 true JP6477340B2 (ja) | 2019-03-06 |
Family
ID=57986268
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015153852A Active JP6477340B2 (ja) | 2015-08-04 | 2015-08-04 | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6477340B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6868699B2 (ja) * | 2017-08-07 | 2021-05-12 | 日立Astemo株式会社 | 路側物検出装置、路側物検出方法及び路側物検出システム |
| JP7414603B2 (ja) * | 2020-03-19 | 2024-01-16 | トヨタ自動車株式会社 | 走路境界決定装置および走路境界決定方法 |
| JP2023029065A (ja) * | 2021-08-20 | 2023-03-03 | 京セラ株式会社 | 画像処理装置、撮像装置、及び移動体 |
| CN114250676A (zh) * | 2021-12-28 | 2022-03-29 | 云南省公路科学技术研究院 | 一种用于快速检测沥青路面横坡装置及其使用方法 |
| CN115852789B (zh) * | 2022-12-16 | 2024-09-06 | 东南大学 | 一种基于移动激光测量系统的道路宽度检测方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3372190B2 (ja) * | 1997-07-17 | 2003-01-27 | 富士重工業株式会社 | 車両の衝突防止装置 |
| JP2001331787A (ja) * | 2000-05-19 | 2001-11-30 | Toyota Central Res & Dev Lab Inc | 道路形状推定装置 |
| JP4425810B2 (ja) * | 2005-02-09 | 2010-03-03 | アイシン・エィ・ダブリュ株式会社 | 段差学習システム |
| JP5605289B2 (ja) * | 2011-04-05 | 2014-10-15 | トヨタ自動車株式会社 | 移動体の障害認識方法及び障害認識システム |
| JP2013205130A (ja) * | 2012-03-28 | 2013-10-07 | Zenrin Co Ltd | 路面形状データの生成方法、路面形状データ生成装置およびコンピュータプログラム |
| JP5829980B2 (ja) * | 2012-06-19 | 2015-12-09 | トヨタ自動車株式会社 | 路側物検出装置 |
-
2015
- 2015-08-04 JP JP2015153852A patent/JP6477340B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017033366A (ja) | 2017-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3637313B1 (en) | APPARATUS AND METHOD FOR DISTANCE ESTIMATION | |
| US9771080B2 (en) | Road surface gradient detection device | |
| US10482615B2 (en) | Image processing device and image processing method | |
| US9898669B2 (en) | Traveling road surface detection device and traveling road surface detection method | |
| JP6477340B2 (ja) | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 | |
| JP6451858B2 (ja) | 段差検出装置及び段差検出方法 | |
| JP6493533B2 (ja) | 段差検出装置及び段差検出方法 | |
| JP6561670B2 (ja) | 段差検出装置及び段差検出方法 | |
| JP2012159469A (ja) | 車両用画像認識装置 | |
| JP2016200557A (ja) | 校正装置、距離計測装置及び校正方法 | |
| US20200193184A1 (en) | Image processing device and image processing method | |
| JP6485280B2 (ja) | 段差検出装置及び段差検出方法 | |
| JP6451544B2 (ja) | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190121 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6477340 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |