JP2012162196A - 機器の制御装置 - Google Patents
機器の制御装置 Download PDFInfo
- Publication number
- JP2012162196A JP2012162196A JP2011024834A JP2011024834A JP2012162196A JP 2012162196 A JP2012162196 A JP 2012162196A JP 2011024834 A JP2011024834 A JP 2011024834A JP 2011024834 A JP2011024834 A JP 2011024834A JP 2012162196 A JP2012162196 A JP 2012162196A
- Authority
- JP
- Japan
- Prior art keywords
- status
- control
- determination
- determined
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Seats For Vehicles (AREA)
- Air Bags (AREA)
Abstract
【解決手段】制御手段は、第1判定処理S10(第1判定手段)によって占有物が「大人」に属すると判定された場合には、助手席用エアバッグ装置に対して出力High制御S41aを行い、第2判定処理S20(第2判定手段)によって占有物が「大人」または「小人」に属すると判定された場合には、助手席用エアバッグ装置に対して展開ON制御S42aを行うと共に、制御手段は、第1判定処理S10によって占有物が「大人」に属すると判定された場合には、第2判定処理S20の判定結果に関わらず展開ON制御S42aを行うことを特徴としている。
【選択図】図4
Description
図6に示すように、荷重Wと互いに異なる二つの閾値荷重Wth1、Wth2とを比較し(S102)、荷重WがWth1より大きければ「大人」と仮判定し(S104)、荷重WがWth1とWth2との間であれば「子供」と仮判定し(S106)、荷重WがWth2より小さければ「空席」と仮判定している(S108)。その後、現在保持する判定状態と今回の仮判定状態とに基づいて、今回の状態遷移を判定する(S110)。そして、S110にて状態遷移なしの場合には、タイマがカウント中かどうかを判定し(S 118)、タイマがその閾値時間Tthに達したかどうかを調べ(S120)、タイマが閾値時間Tthに達したときには判定を変更している(S122)。
シートが空席の状態から乗員がシートに着座した際、落ち着く位置に座るまでの乗員の動作や、車両の振動等により、荷重センサの出力が安定しない可能性がある。ここで、特許文献1の制御装置の場合、乗員が「子供」か「大人」かのいずれのステータスにあるかが判定されるまでの間は、直前の状態である「空席」のステータスのままエアバッグ装置の制御を続ける。このように、乗員がシートに着座してから制御装置によるステータスの判定までの間は、「子供」か「大人」かのいずれかのステータスにあるにもかかわらず、「空席」のステータスを維持するため、適切にエアバッグ装置を制御できないおそれがある。
本発明によれば、ステータスの判定前であっても、前回判定したステータスに基づいて、シート関連機器の制御を行うことができるので、ステータスの判定前であっても、シート関連機器を適切に制御できる。特に、第1判定手段および第2判定手段のうち一方の判定結果が出る前でも、シート関連機器の制御を滞りなく行うことができる。
本発明によれば、第1判定手段に要する所定時間または所定割合時間が、第2判定手段に要する所定時間または所定割合時間よりも短く設定されているので、第2判定手段によるステータス群の判定よりも、第1判定手段によるステータスの判定を早期にできる場合がある。この場合には、第1判定手段によるステータスの判定に基づき重要度が高い制御を行うことにより、より適切にシート関連機器を制御できる。
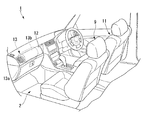
図1は、本実施形態の助手席側エアバッグ装置13の制御装置20を備えた車両1の車室内2を示す斜視図である。なお、以下の説明では、前後方向は車両1の前後方向を示し、左右方向は車両1の左右方向を示し、上下方向は車両1の上下方向を示している。また、本実施形態では、車両1の右側に運転席用シート11が配置され、車両1の左側に助手席用シート9が配置された車両1について説明する。
図1に示すように、助手席用シート9の前方に配置されたインストゥルメントパネル12の内部には、助手席側エアバッグ装置13が収納されている。
助手席側エアバッグ装置13は、車両衝突時にインフレータ13aから供給されるガスによりエアバッグ袋体13bが車室内2に展開し、助手席用シート9に着座している乗員を拘束するものである。
インフレータ13aは、不図示の複数のガス発生部を有している。インフレータ13aは、複数のガス発生部のうちいずれのガス発生部でガスを発生させるかにより、エアバッグ出力をHighまたはLowの2段階に変更できるようになっている。ここで、エアバッグ出力がHighとは、大人の乗員を効果的に拘束できるエアバッグ袋体13bの展開速度をいう。また、エアバッグ出力がLowとは、子供の乗員を効果的に拘束できるエアバッグ袋体13bの展開速度をいう。
後述するように、エアバッグ出力は、衝突時に助手席用シート9に着座している乗員の状況(以下「ステータス」という。)に応じて制御されている。インフレータ13aは、制御に対応してエアバッグ出力がHighまたはLowとなるようにガスを発生させ、エアバッグ袋体13bを展開している。
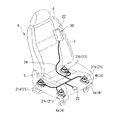
図2は、荷重センサ21を備えた制御装置20の概略図である。
制御装置20は、助手席用シート9に内蔵されており、シートに作用する荷重を検出する複数の荷重センサ21(21a〜21d)と、各荷重センサ21a〜21dと接続されたコントローラ22と、を備えている。
コントローラ22は、この判定手段によりステータスまたはステータス群に属すると判定をした後、後述するように、ステータスまたはステータス群に対応した制御を行っている。なお、ステータスまたはステータス群に対応した制御の情報は、シートハーネス24、コネクタ23および不図示の車体ハーネスを介して、不図示のエアバッグ制御ECU(Electronic Control Unit)に出力される。
図3は、各ステータスおよび各制御の説明図である。
図3に示すように、制御装置20におけるコントローラ22のプログラムには、荷重センサの検出値に応じて複数のステータス32が予め設定されている。本実施形態では、「空席」〜「大人」の4個のステータス32が設けられており、「空席」〜「大人」の各ステータスは、所定の閾値荷重Wth1,Wth2,およびWth3により分別されている。
「チャイルドシート」は、助手席用シート9上の占有物の荷重WがWth1≦W<Wth2の場合であり、例えば助手席用シート9にチャイルドシートの重量相当の荷重が作用している状態に相当する。
「小人」は、助手席用シート9上の占有物の荷重WがWth2≦W<Wth3の場合であり、例えば助手席用シート9に子供の重量相当の荷重が作用している状態に相当する。なお、「小人」は、本願請求項の第2ステータスに相当する。
「大人」は、助手席用シート9上の占有物の荷重WがWth3≦Wの場合であり、例えば助手席用シート9に大人の重量相当の荷重が作用している状態に相当する。なお、「大人」は、本願請求項の第1ステータスに相当する。
コントローラ22のプログラムは、判定手段として、第1判定手段、第2判定手段および第3判定手段を備えている。
第1判定手段では、助手席用シート9上の占有物が、「大人」に属するか否か、「大人」以外(すなわち、「小人」、「チャイルドシート」または「空席」)に属するか否かを判定している。
第2判定手段では、助手席用シート9上の占有物が、「大人」または「小人」に属するか否か、「大人」以外かつ「小人」以外(すなわち、「チャイルドシート」または「空席」)に属するか否かを判定している。
第3判定手段では、助手席用シート9上の占有物が、「空席」以外(すなわち、「大人」、「小人」または「チャイルドシート」)に属するか否か、「空席」に属するか否かを判定している。
エアバッグ出力制御41では、出力High制御41a(本願請求項の第1制御に相当。)または出力Low制御41bを行っている。
具体的には、第1判定手段により助手席用シート9上の占有物が「大人」に属すると判定された場合には、出力High制御41aを行う。出力High制御41aでは、エアバッグ出力がHighとなるようにインフレータ13aからガスを供給する。
また、第1判定手段により助手席用シート9上の占有物が「大人」以外に属すると判定された場合には、出力Low制御41bを行う。出力Low制御41bでは、エアバッグ出力がLowとなるようにインフレータ13aからガスを供給する。
具体的には、第2判定手段により助手席用シート9上の占有物が「大人」または「小人」に属すると判定された場合には、展開ON制御42aを行う。展開ON制御42aでは、エアバッグ袋体13bを展開するように設定する。
また、第2判定手段により助手席用シート9上の占有物が「大人」以外かつ「小人」以外に属すると判定された場合には、展開OFF制御42bを行う。展開OFF制御42bでは、エアバッグ袋体13bを展開しないよう設定する。
具体的には、第3判定手段により助手席用シート9上の占有物が「空席」以外に属すると判定された場合には、「着座」判断43aを行う。「着座」判断43aでは、助手席用シート9上に占有物が存在する「着座」状態と判断する。
また、第3判定手段により助手席用シート9上の占有物が「空席」に属すると判定された場合には、「空席」判断43bを行う。「空席」判断43bでは、助手席用シート9上に占有物が存在しない「空席」状態と判断する。
ここで、ステータスが「空席」および「チャイルドシート」である場合に、展開OFF制御42bを行うが、空席状態である場合に、常にテルテールを点灯させるのは煩わしい。
したがって、テルテールは、ステータスが「チャイルドシート」に属していると判断したときに、助手席用シート9上に占有物があるがエアバッグ袋体13bが展開されないことを運転者に知らせている。具体的には、着座状態判断制御43の判断結果が「着座」であり、なおかつ、エアバッグ袋体展開制御42が展開OFF制御42bの場合に、テルテールの点灯制御を行う。
図4は、制御装置20で行われる制御のフローチャート50である。
まず、図4に示すように、荷重W読み込みS1で、荷重センサ21a〜21dにより検出された荷重Wのデータ35(図3参照)を読み込む。
図4に示すように、第1判定手段では第1判定処理S10が行われ、第2判定手段では第2判定処理S20が行われ、第3判定手段では第3判定処理S30が行われる。第1判定処理S10、第2判定処理S20および第3判定処理S30は、それぞれ並列に処理されている。
また本実施形態では、閾値時間Tth6は、閾値時間Tth4よりも短くなるように設定されている。閾値時間の詳細は後述する。
第1判定処理S10では、助手席用シート9上の占有物が、「大人」に属するか否か、「大人」以外に属するか否かの判定を行う。
まず、S11では、検出された荷重Wのデータ35(図3参照)と、閾値荷重Wth3との比較を行う。
S11において、荷重Wのデータ35がWth3≦Wを満足する場合には、ステータスが「大人」に属すると仮判定(S12a)される。
S13aでは、前回の仮判定S12aが「大人」の場合には、前回までのカウントに加算してカウントを行う。また、前回の仮判定S12aがWth3≦Wを満足しない(すなわちステータスが「大人」以外)場合には、前回までのカウントをリセットしてから再度カウントを行う。このようにして、荷重センサ21の検出値が、所定回数連続してWth3≦Wになったか否か、すなわちS14aで継続時間Tが閾値時間Tth6に達したか否かを判定している。
次に、コントローラ22内で、Wth3≦Wを満足しない荷重Wのデータ35のカウントを行い(S13b)、所定時間継続して荷重Wのデータ35がWth3≦Wを満足しないかどうかの判定を行う(S14b)。
第2判定処理S20では、助手席用シート9上の占有物が、「大人」または「小人」に属するか否か、「大人」以外かつ「小人」以外に属するか否かの判定を行う。
まず、S21では、検出された荷重Wのデータ35と、閾値荷重Wth2との比較を行う。
S21において、荷重Wのデータ35がWth2≦Wを満足する場合には、ステータスが「大人」または「小人」に属すると仮判定(S22a)される。
次に、コントローラ22内で、Wth2≦Wを満足しない荷重Wのデータ35のカウントを行い(S23b)、所定時間継続して荷重Wのデータ35がWth2≦Wを満足しないかどうかの判定を行う(S24b)。
第3判定処理S30では、助手席用シート9上の占有物が、「空席」以外に属するか否か、「空席」に属するか否かの判定を行う。
まず、S31では、検出された荷重Wのデータ35と、閾値荷重Wth1との比較を行う。
S31において、荷重Wのデータ35がWth1≦Wを満足する場合には、ステータスが「空席」以外に属すると仮判定(S32a)される。
次に、コントローラ22内で、Wth1≦Wを満足しない荷重Wのデータ35のカウントを行い(S33b)、所定時間継続して荷重Wのデータ35がWth1≦Wを満足しないかどうかの判定を行う(S34b)。
図3に示すように、制御装置20におけるコントローラ22のプログラムでは、各ステータスに対応した複数の制御(エアバッグ出力制御41、エアバッグ袋体展開制御42および着座状態判断制御43)が行われている。
コントローラ22は、図4に示すように、第1判定処理S10に続けてエアバッグ出力制御フローS41でエアバッグ出力制御41を行い、第2判定処理S20に続けてエアバッグ袋体展開制御フローS42でエアバッグ袋体展開制御42を行い、第3判定処理S30に続けて着座状態判断制御フローS43で着座状態判断制御43を行っている。
エアバッグ出力制御フローS41では、第1判定処理S10におけるステータスの判定結果に基づいて出力High制御41aまたは出力Low制御41b(図3参照)が行われる。
第1判定処理S10によりステータスが「大人」に属すると判定された場合には(S15a)、エアバッグ出力制御フローS41では、エアバッグ出力をHighに設定する出力High制御S41aが行われる。
これに対して、第1判定処理S10によりステータスが「大人」以外に属すると判定された場合には(S15b)、エアバッグ出力制御フローS41では、エアバッグ出力をLowに設定する出力Low制御S41bが行われる。
エアバッグ袋体展開制御フローS42では、第2判定処理S20におけるステータスの判定結果に基づいて展開ON制御42aまたは展開OFF制御42b(図3参照)が行われる。
第2判定処理S20によりステータスが「大人」または「小人」に属すると判定された場合には(S25a)、エアバッグ袋体展開制御フローS42では、エアバッグ展開をONに設定する展開ON制御S42aが行われる。
これに対して、第2判定処理S20によりステータスが「大人」以外かつ「小人」以外に属すると判定された場合には(S25b)、エアバッグ袋体展開制御フローS42では、エアバッグ展開をOFFに設定する展開OFF制御S42bが行われる。
着座状態判断制御フローS43では、第3判定処理S30におけるステータスの判定結果に基づいて助手席用シート9の「着座」判断43aおよび「空席」判断43b(図3参照)が行われる。
第3判定処理S30によりステータスが「空席」以外に属すると判定された場合には(S35a)、着座状態判断制御フローS43では、助手席用シート9上に占有物が存在するとして「着座」判断43aが行われる。
これに対して、第3判定処理S30によりステータスが「空席」に属すると判定された場合には(S35b)、着座状態判断制御フローS43では、助手席用シート9上に占有物が存在しないとして「空席」判断43bが行われる。
すなわち、フローチャート50は、第1判定処理S10によって助手席用シート9上の占有物が「大人」に属すると判定された場合には、第2判定処理S20および第3判定処理S30の判定結果に関わらず展開ON制御S42aおよび「着座」判断43aが行われるように構成されている。
同様に第2判定処理S20により「大人」または「小人」に属すると判定されて(S25a)、展開ON制御S42aが行われると、自動的に「着座」判断43aが行われるように構成されている。
すなわち、フローチャート50は、第2判定処理S20によって助手席用シート9上の占有物が「大人」または「小人」に属すると判定された場合には、第3判定処理S30の判定結果に関わらず「着座」判断43aが行われるように構成されている。
すなわち、フローチャート50は、第3判定処理S30によって助手席用シート9上の占有物が「空席」に属すると判定された場合には、第1判定処理S10および第2判定処理S20の判定結果に関わらず、展開OFF制御S42bおよび出力Low制御41bが行われるように構成されている。
同様に、第2判定処理S20により「大人」以外かつ「小人」以外に属すると判定されて(S25b)、展開OFF制御42bが行われると、自動的に出力Low制御41bが行われるように構成されている。
すなわち、フローチャート50は、第2判定処理S30によって助手席用シート9上の占有物が「大人」以外かつ「小人」以外に属すると判定された場合には、第1判定処理S10の判定結果に関わらず、出力Low制御41bが行われるように構成されている。
以下に、図3および図4を用いて、荷重センサ21により検出された荷重Wのデータ35に基づく制御装置20の作用について説明する。なお、本項においては、第1判定処理S10および第2判定処理S20と、エアバッグ出力制御フローS41のみについて説明することとする。
なお、以下では、Wth3≦Wとなる荷重Wのデータ35が3回連続してカウントされることにより、Tth6≦T(S14a)を満足する(すなわち、Tth6を、荷重センサ21のサンプリング時間間隔の3倍に設定する)場合を例にして説明する。また、Wth2≦Wとなる荷重Wのデータ35が5回連続してカウントされることにより、Tth4≦T(S24a)を満足するものとして説明する。このように、閾値時間Tth6は、閾値時間Tth4よりも短くなるように設定されている。
また、以下では、図3に示す荷重Wのデータ35のうち、データD1〜D3までの読み込みが完了し、データD4の読み込みを開始した場合について説明する。
続いて、第1判定処理S10により、Wth3≦Wを満足する荷重Wのデータ35のカウントを行い(S13a)、3回連続して荷重WのデータがWth3≦Wを満足するかどうか、すなわちTth6≦Tを満足するかどうかの判定を行う(S14a)。
ここで、コントローラ22にデータD4が読み込まれた時点でデータ総数は4個のため、Wth2≦Wとなる荷重Wのデータ35が5回連続してカウントされることはない。すなわち、第2判定処理S20でWth2≦Wを満足する荷重Wのデータ35が5回連続してカウントされる前に、第1判定処理S10でWth3≦Wを満足する荷重Wのデータ35が3回連続してカウントされる。
これにより、第2判定処理S20の判定結果が出る前であっても、この場合D4が読み込まれ、出力High制御S41aに設定された時点で、第1判定処理S10により「大人」に属すると判定された場合には、出力High制御S41aおよび展開ON制御S42aを行うことができる。このように、第2判定処理S20の判定結果が出る前であっても、迅速かつ適切に制御している。
すなわち、第1判定処理S20の判定結果が出力Highに設定が変更された時点で、それぞれ出力Low制御41bが出力High制御41aに、展開OFF制御42bが展開ON制御42a、「空席」判断43bが「着座」判断43aに変更される。
図3に示すように、荷重Wのデータ35は、データD2以降データD6まで、5回連続してWth2≦Wを満足している。したがって、コントローラ22にデータD1からデータD6までの荷重Wのデータ35が読み込まれることで、データD2以降、Wth2≦Wを満足する荷重Wのデータ35が5回連続してカウントされる。これにより、Wth2≦Wを満足すると判断され(S24a)、助手席用シート9上の占有物のステータスが「大人」または「小人」に属すると判定される(S25a)
本実施形態によれば、第1判定処理S10によって「大人」に属すると判定された場合には出力High制御S41aを行い、さらに第2判定処理S20の判定結果に関わらず展開ON制御S42aを行うので、第1判定処理S10で「大人」に属すると判定することにより、出力High制御S41aおよび展開ON制御S42aを行うことができる。これにより、第2判定処理S20の判定結果が出る前であっても、第1判定処理S10で「大人」に属すると判定した時点で、出力High制御S41aおよび展開ON制御S42aを行うことができる。したがって、第2判定処理S20の判定結果が出る前であっても、適切に制御できる。また、「大人」または「子供」のステータスに属すると判定された場合に展開ON制御S42aを行うので、「大人」および「子供」のどちらのステータスに属しているかが判定できなくても、助手席用エアバッグ装置13の制御を滞りなく行うことができる。
図5は、ステータス間で変動する荷重Wのデータ35の説明図である。
以下に、図4および図5を用いて、実施形態の変形例の作用について説明する。
上述した実施形態では、図3に示すように、荷重Wのデータ35がWth3以上の領域で変動していた。これに対して、本変形例では、図5に示すように、荷重Wのデータ35が「小人」および「大人」の各ステータス間で変動する点で、実施形態とは異なっている。
なお、実施形態と同様の構成の部分については、詳細な説明を省略する。
これは、例えば、助手席用シート9が空席の状態から乗員がシートに着座した際、落ち着く位置に座るまでの乗員の動作や、車両1の振動等により、荷重センサ21の出力が安定しない状態を想定している。
続いて、第2判定処理S20により、Wth2≦Wを満足する荷重Wのデータ35のカウントを行い(S23a)、所定時間継続して荷重WのデータがWth2≦Wを満足するかどうか、すなわちTth4≦Tを満足するかどうかの判定を行う(S24a)。
本変形例によれば、第2判定処理S20で「大人」または「小人」に属すると判定された場合に展開ON制御S42aを行っているので、「大人」および「小人」のどちらのステータスに属しているかが判定できなくても、エアバッグ装置13の制御を滞りなく行うことができる。
本実施形態および実施形態の変形例では、シートに関連する機器として、助手席側エアバッグ装置13を例に説明したが、シートに関連する機器は助手席側エアバッグ装置13に限られない。例えば、ステアリングホイール内に格納された運転席側エアバッグ装置や、車両の窓の縁辺に沿って格納されたサイドカーテンエアバッグ装置、衝突時に乗員を拘束するシートベルトの巻取装置等にも本発明を適用できる。
これに対して、例えば、所定の閾値時間だけ継続して存在していなくても、1個のステータスまたはステータス群に存在した時間を積算して、所定割合時間存在する場合に当該ステータスに属すると判定してもよい。具体的には、荷重Wのデータ35のカウントを行い、所定の積算回数だけ1個のステータスまたはステータス群に存在する場合に、当該ステータスに属すると判定してもよい。
Claims (3)
- シートに作用する荷重を検出する荷重センサと、
前記荷重センサの検出値が、予め設定された少なくとも3個のステータスのうち、1個のステータスまたはステータス群に所定時間継続してまたは所定割合時間存在する場合に、前記シート上の占有物が当該ステータスまたは当該ステータス群に属すると判定する判定手段と、
を備え、
該判定手段によって判定された前記ステータスまたは前記ステータス群に基づき、前記シートに関連する機器を制御する機器の制御装置において、
前記判定手段は、
前記占有物が、前記少なくとも3個のステータスのうち、第1ステータスに属するか否か、該第1ステータス以外に属するか否かを判定する第1判定手段と、
前記占有物が、前記少なくとも3個のステータスのうち、前記第1ステータスまたは第2ステータスに属するか否か、前記第1ステータス以外かつ前記第2ステータス以外に属するか否かを判定する第2判定手段と、
を備え、
前記制御手段は、前記第1判定手段によって前記占有物が前記第1ステータスに属すると判定された場合には、前記機器に対して第1制御を行い、前記第2判定手段によって前記占有物が前記第1ステータスまたは前記第2ステータスに属すると判定された場合には、前記機器に対して第2制御を行うと共に、
前記制御手段は、前記第1判定手段によって前記占有物が前記第1ステータスに属すると判定された場合には、前記第2判定手段の判定結果に関わらず前記第2制御を行い、前記第2判定手段によって前記第1ステータスまたは前記第2ステータスに属すると判定された場合には、前記第1判定手段の判定結果に関わらず前記第2制御を行うことを特徴とする機器の制御装置。 - 前記判定手段により前記荷重センサの検出値が前記少なくとも3個のステータスのうち、1個のステータスに前記所定時間継続してまたは前記所定割合時間存在しないと判定された場合は、前記制御手段は、前記判定手段により前回判定されたステータスに基づいて前記機器を制御することを特徴とする請求項1に記載の機器の制御装置。
- 前記第1判定手段により前記占有物が前記第1ステータスに属するか否かを判定するのに要する前記所定時間または前記所定割合時間が、前記第2判定手段により前記占有物が前記第1ステータスまたは前記第2ステータスに属するか否かを判定するのに要する前記所定時間または前記所定割合時間よりも、短く設定されたことを特徴とする請求項1または2に記載の機器の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011024834A JP5576310B2 (ja) | 2011-02-08 | 2011-02-08 | 機器の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011024834A JP5576310B2 (ja) | 2011-02-08 | 2011-02-08 | 機器の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012162196A true JP2012162196A (ja) | 2012-08-30 |
| JP5576310B2 JP5576310B2 (ja) | 2014-08-20 |
Family
ID=46842047
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011024834A Expired - Fee Related JP5576310B2 (ja) | 2011-02-08 | 2011-02-08 | 機器の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5576310B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014193705A (ja) * | 2013-03-29 | 2014-10-09 | Denso Corp | 荷重センサを用いる乗員判定装置 |
| JP2021172257A (ja) * | 2020-04-27 | 2021-11-01 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 乗員判定装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10318861A (ja) * | 1997-05-21 | 1998-12-04 | Furukawa Electric Co Ltd:The | 着座検知装置 |
| JP2001074541A (ja) * | 1999-09-03 | 2001-03-23 | Toyota Motor Corp | 着座乗員検知装置及び着座乗員検知方法 |
| JP2003165414A (ja) * | 2001-11-28 | 2003-06-10 | Mazda Motor Corp | 車両の乗員検知装置 |
| JP3570629B2 (ja) * | 2002-02-20 | 2004-09-29 | 株式会社デンソー | 荷重センサを用いる乗員判定装置 |
| JP2006123835A (ja) * | 2004-11-01 | 2006-05-18 | Calsonic Kansei Corp | 乗員検知装置 |
| JP2008213700A (ja) * | 2007-03-06 | 2008-09-18 | Calsonic Kansei Corp | 車両用乗員検知装置 |
-
2011
- 2011-02-08 JP JP2011024834A patent/JP5576310B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10318861A (ja) * | 1997-05-21 | 1998-12-04 | Furukawa Electric Co Ltd:The | 着座検知装置 |
| JP2001074541A (ja) * | 1999-09-03 | 2001-03-23 | Toyota Motor Corp | 着座乗員検知装置及び着座乗員検知方法 |
| JP2003165414A (ja) * | 2001-11-28 | 2003-06-10 | Mazda Motor Corp | 車両の乗員検知装置 |
| JP3570629B2 (ja) * | 2002-02-20 | 2004-09-29 | 株式会社デンソー | 荷重センサを用いる乗員判定装置 |
| JP2006123835A (ja) * | 2004-11-01 | 2006-05-18 | Calsonic Kansei Corp | 乗員検知装置 |
| JP2008213700A (ja) * | 2007-03-06 | 2008-09-18 | Calsonic Kansei Corp | 車両用乗員検知装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014193705A (ja) * | 2013-03-29 | 2014-10-09 | Denso Corp | 荷重センサを用いる乗員判定装置 |
| US9541446B2 (en) | 2013-03-29 | 2017-01-10 | Denso Corporation | Occupant determination apparatus using load sensor |
| JP2021172257A (ja) * | 2020-04-27 | 2021-11-01 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 乗員判定装置 |
| JP7516097B2 (ja) | 2020-04-27 | 2024-07-16 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 乗員判定装置 |
| US12371028B2 (en) | 2020-04-27 | 2025-07-29 | Robert Bosch Gmbh | Occupant determination device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5576310B2 (ja) | 2014-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20070273139A1 (en) | Device for Ascertaining an Occupant Position in a Vehicle | |
| US20220396233A1 (en) | Seat-mounted airbag device | |
| US20170166086A1 (en) | Method and device for generating a signal representing an occupation of a vehicle seat, corresponding computer program, and machine-readable storage medium | |
| JP2022049424A (ja) | ルーフエアバッグシステム及び車両 | |
| CN115447527A (zh) | 座椅搭载型安全气囊装置 | |
| JP5576310B2 (ja) | 機器の制御装置 | |
| JP5038821B2 (ja) | 車両用乗員検知システム | |
| JP4835344B2 (ja) | 車両用乗員保護装置の起動制御装置 | |
| JP6447998B2 (ja) | 車両用乗員判定装置 | |
| US6963287B2 (en) | Occupant weight detecting device | |
| JP2006123835A (ja) | 乗員検知装置 | |
| JP2007218646A (ja) | 車両用乗員検知装置 | |
| CN121240992A (zh) | 约束系统、车辆座椅和对应的方法 | |
| KR101372549B1 (ko) | 에어백제어장치 및 방법 | |
| JP6786877B2 (ja) | 車両用シート乗員判別システム | |
| JP4258931B2 (ja) | チャイルドシート検知装置およびチャイルドシート検知方法 | |
| CN113492785B (zh) | 乘员保护装置 | |
| JP6623021B2 (ja) | 車両用乗員保護装置 | |
| JP6560517B2 (ja) | 車両用座席間エアバック装置 | |
| JP4522224B2 (ja) | 乗員検知装置 | |
| JP2008247145A (ja) | 車両用乗員拘束・運動制御装置システム | |
| JP2013154838A (ja) | 乗員保護制御装置 | |
| JP4337043B2 (ja) | 乗員検知システム | |
| US12515610B1 (en) | Occupant restraint system and method of deploying same | |
| JP4423744B2 (ja) | エアベルト装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140529 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140617 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140703 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5576310 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |