JP2012163346A - 表面形状計測装置、及び表面形状計測方法 - Google Patents
表面形状計測装置、及び表面形状計測方法 Download PDFInfo
- Publication number
- JP2012163346A JP2012163346A JP2011021620A JP2011021620A JP2012163346A JP 2012163346 A JP2012163346 A JP 2012163346A JP 2011021620 A JP2011021620 A JP 2011021620A JP 2011021620 A JP2011021620 A JP 2011021620A JP 2012163346 A JP2012163346 A JP 2012163346A
- Authority
- JP
- Japan
- Prior art keywords
- coordinates
- distance measurement
- movement
- measurement data
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
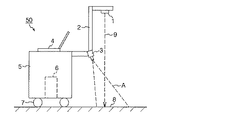
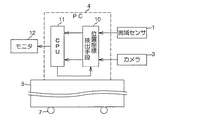
【解決手段】道路8の表面にレーザビーム9を走査させて、道路8の表面に照射したレーザビーム9の方位毎の測距データを出力する測域センサ1と、レーザビーム9の投光面の一部を含んだ道路8の表面を撮像するカメラ3と、測域センサ1、及びカメラ3を道路8の表面に沿って車輪7を回転させて移動させる走行台車5と、走行台車5により測域センサ1、及びカメラ3を移動させた時に測域センサ1から得られた測距データを演算処理してz軸方向の位置座標を求め、カメラ3から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求める位置座標検出手段と、位置座標検出手段により求められた各軸方向の位置座標に基づいて道路8の三次元形状を演算するPC4と、を備えて構成されている。
【選択図】図1
Description
これを解決するために、高精度なGPSを利用して位置を検出する方法も考えられるが、ビルの谷間や建物の内部では人工衛星の電波が検出できず精度が大幅に低下するといった問題がある。
また、従来技術として同一出願人による特許文献1には、小径管内の形状を計測するために光により全方位に照射し、撮像手段を移動させたときに撮像された光リングの径の値、及び文様の移動量に基づいて撮像手段の移動距離を演算することにより、小径管内面の三次元形状を演算して、小径管内面の状態を正確に且つ迅速に計測することが可能な管内面形状計測装置について開示されている。
本発明は、かかる課題に鑑みてなされたものであり、レーザスキャナとカメラを走行台車に取り付け、走行台車を移動しながらレーザスキャナにより計測対象物の断面データを取得し、同時にカメラで撮像された画像データに基づいて走行台車の移動量と移動方向を演算により求め、両者のデータを重ねることで、計測対象物の三次元形状を容易に、且つリアルタイムに得ることができる表面形状計測装置、及び表面形状計測方法を提供することを目的とする。
三次元形状を得るには、x、y、及びz軸方向の座標が必要である。本発明では、z軸方向は、レーザビームを計測対象物の表面に走査して、レーザ光が計測対象物の表面を反射して往復する時間から距離を計測し、計測した各方位ごとの距離データを演算してz軸座標を求める。また、x軸、y軸の座標は、カメラ等の撮像手段により計測対象物の表面を移動しながら撮像して、その画像データとレーザビームによる距離データzを演算処理してx、y座標を求める。従って、測距データ検出手段、及び撮像手段を計測対象物表面に沿って移動させる移動手段が必要となる。本発明では、x、y軸方向の座標の変化を演算して移動手段の移動量と移動方向を求める点が特徴である。これにより、簡単な構成で、且つ低コストで計測対象物の三次元形状を計測することができる。
例えば、計測対象物が道路の場合、路面のテクスチャ(表面模様)は全て異なる。そこで本発明では、ある領域のテクスチャを読み取って、画像フレーム単位に前のフレームに撮像されたテクスチャと次のフレームの同じテクスチャがどこに移動したかを判定して移動手段の移動量及び移動方向を演算する。これにより、移動手段の移動量と移動方向を検知する装置を不要として、計測装置のコストを低減することができる。
撮像手段により撮像された画像上の座標(u,v)と実座標(x,y,z)との関係は、

となる。この式からh11〜h33の係数を算出し、実座標(x,y)の算出は、画像上の座標(u,v)と測距データ検出手段からのz座標を用いて、
として求まる。これにより、撮像された画像上の座標(u,v)と測距データ検出手段による測距データのz座標から実座標(x,y)を求めることができる。
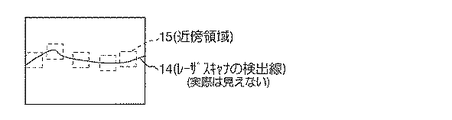
測距データ検出手段は扇状の領域を検出するため、下向きをz軸とし、y軸を通るものとする(y0=0)。測距データ検出手段から検出されるx0、z0のデータおよびy0=0から、カメラ画像上での測距データ検出手段で検出している領域の画像上での数カ所の近傍領域を検出する。
この近傍領域の中心の画像上での座標(u,v)はx0、z0のデータおよびy0=0を以下の式に代入して求まる。
撮像手段はビデオカメラを用いて連続した画像を撮影し、連続した画像間で近傍領域の移動量(Δu、Δv)を検出する。移動後の座標(u+Δu,v+Δv)およびz(測距データ検出手段からの座標z0。移動手段は上下方向には移動しないものとし、移動前後一定でz0である。)を式に代入することで移動後の(x,y)が決定される。移動前の座標(x0,y0)と比較することで、移動手段の移動量および移動方向が算出される。
請求項1と同様の作用効果を奏する。
請求項6は、前記制御手段が、前記撮像手段により撮像された画像上での前記計測対象物の表面模様の移動量及び移動方向に基づいて前記移動手段の移動量及び移動方向を演算するステップを含むことを特徴とする。
請求項2と同様の作用効果を奏する。
請求項3と同様の作用効果を奏する。
請求項8は、前記制御手段が、前記撮像手段により撮像された画像上での前記測距データ検出手段により検出した領域の複数個所の近傍領域を検出し、該近傍領域の移動前の座標と移動後の座標に基づいて前記移動手段の移動量及び移動方向を決定するステップを含むことを特徴とする。
請求項4と同様の作用効果を奏する。
ここでPC4は、カメラ3により撮像された画像上での道路8の表面模様の移動量及び移動方向に基づいて走行台車5の移動量及び移動方向を演算する。例えば、計測対象物が道路の場合、路面のテクスチャ(表面模様)は全て異なる。そこで本実施形態では、ある領域のテクスチャを読み取って、画像フレーム単位に前のフレームに撮像されたテクスチャと次のフレームの同じテクスチャがどこに移動したかを計測して走行台車5の移動量及び移動方向を演算する。これにより、走行台車5の移動量と移動方向を検知する装置を不要として、装置のコストを低減することができる。
またPC4は、測域センサ1のレーザ投光部を原点として下向きにz軸をとる座標系を設置し、このときのカメラ3により撮像される画像上の座標(u,v)と実座標(x,y,z)の関係から係数を算出し、該係数、画像上の座標(u,v)、及び測距データ検出手段からのz座標を用いて実座標(x,y,z)を求める(詳細は後述する)。
測域センサ(以下、説明の都合上レーザスキャナと呼ぶ)1は、鉛直(路面が水平の場合)下向きに扇状にレーザを投光するものとし、レーザが投光された平面上での形状(断面形状)を計測する。カメラ3はレーザスキャナ1のレーザ投光面の一部を含み、道路(歩道)表面8を撮影する。走行台車5の移動量および移動方向は、カメラ3に撮影される画像上での道路表面のテクスチャ(表面模様)の移動量および移動方向から検出される。
ここで、h11−h33は係数である。
これを展開し、
sを消去して変形し、
となる。
h11−h33が決まると実座標(x,y)の算出はカメラ座標(u,v)とレーザスキャナ1からのz座標を用いて以下の式で可能になる。
となる。
となり、x、y、zからu、vへの変換が可能になる。
となり、相関関数φfgがもっとも小さくなるΔuとΔvを求めることを行う。
(x0,y0)から(x,y)への平行移動および回転(方向)を示す式は以下のようになる。
・・・(4)
展開すると、
・・・(5)
になる。
Aの逆行列(または擬似逆行列)を両辺にかけることで、係数h11からh23が決定される。係数h11からh23が決定されると移動と回転を示す(4)式が決定されることになる。すなわち走行台車5の移動量および移動方向(回転)が決定されたことになる。
尚、本実施形態では道路が水平である場合について言及したが、走行台車に傾きセンサを取り付け、傾きセンサの信号により、測域センサ1から得られる測拒データを補正することにより、坂道での計測も可能とすることができる。
Claims (8)
- 計測対象物の表面に沿って移動しながら該表面の形状を三次元的に計測する表面形状計測装置であって、
前記計測対象物の表面にレーザビームを走査させて、該計測対象物の表面に照射した前記レーザビームの方位毎の測距データを出力する測距データ検出手段と、
前記レーザビームの投光面の一部を含んだ前記計測対象物の表面を撮像する撮像手段と、
前記測距データ検出手段、及び前記撮像手段を前記計測対象物表面に沿って移動させる移動手段と、
該移動手段により前記測距データ検出手段、及び前記撮像手段を移動させた時に該測距データ検出手段から得られた測距データを演算処理してz軸方向の位置座標を求め、前記撮像手段から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求める位置座標検出手段と、
該位置座標検出手段により求められたx軸方向、y軸方向、及びz軸方向の位置座標に基づいて前記計測対象物の三次元形状を演算する制御手段と、
を備えたことを特徴とする表面形状計測装置。 - 前記制御手段は、前記撮像手段により撮像された画像上での前記計測対象物の表面模様の移動量及び移動方向に基づいて前記移動手段の移動量及び移動方向を演算することを特徴とする請求項1に記載の表面形状計測装置。
- 前記制御手段は、前記測距データ検出手段のレーザ投光部を原点として下向きにz軸をとる座標系を設置し、このときの前記撮像手段により撮像される画像上の座標(u,v)と実座標(x,y,z)の関係から係数を算出し、該係数、前記画像上の座標(u,v)、及び前記測距データ検出手段からのz座標を用いて前記実座標(x,y,z)を求めることを特徴とする請求項1又は2に記載の表面形状計測装置。
- 前記制御手段は、前記撮像手段により撮像された画像上での前記測距データ検出手段により検出した領域の複数個所の近傍領域を検出し、該近傍領域の移動前の座標と移動後の座標に基づいて前記移動手段の移動量及び移動方向を決定することを特徴とする請求項1又は2に記載の表面形状計測装置。
- 測距データ検出手段、撮像手段、移動手段、位置座標検出手段、及び制御手段を備え、計測対象物の表面に沿って移動しながら該表面の形状を三次元的に計測する表面形状計測装置の表面形状計測方法であって、
前記測距データ検出手段が、前記計測対象物の表面にレーザビームを走査させて、該計測対象物の表面に照射した前記レーザビームの方位毎の測距データを出力するステップと、
前記撮像手段が、前記レーザビームの投光面の一部を含んだ前記計測対象物の表面を撮像するステップと、
前記移動手段が、前記測距データ検出手段、及び前記撮像手段を前記計測対象物表面に沿って移動させるステップと、
前記位置座標検出手段が、前記移動手段により前記測距データ検出手段、及び前記撮像手段を移動させた時に該測距データ検出手段から得られた測距データを演算処理してz軸方向の位置座標を求め、前記撮像手段から得られた画像データを演算処理してx軸方向、並びにy軸方向の位置座標を求めるステップと、
前記制御手段が、前記位置座標検出手段により求めたx軸方向、y軸方向、及びz軸方向の位置座標に基づいて前記計測対象物の三次元形状を演算するステップと、
を含むことを特徴とする表面形状計測方法。 - 前記制御手段が、前記撮像手段により撮像された画像上での前記計測対象物の表面模様の移動量及び移動方向に基づいて前記移動手段の移動量及び移動方向を演算するステップを含むことを特徴とする請求項5に記載の表面形状計測方法。
- 前記制御手段が、前記測距データ検出手段のレーザ投光部を原点として下向きにz軸をとる座標系を設置し、このときの前記撮像手段により撮像される画像上の座標(u,v)と実座標(x,y,z)の関係から係数を算出し、該係数、前記画像上の座標(u,v)、及び前記測距データ検出手段からのz座標を用いて前記実座標(x,y,z)を求めるステップを含むこと特徴とする請求項5又は6に記載の表面形状計測方法。
- 前記制御手段が、前記撮像手段により撮像された画像上での前記測距データ検出手段により検出した領域の複数個所の近傍領域を検出し、該近傍領域の移動前の座標と移動後の座標に基づいて前記移動手段の移動量及び移動方向を決定するステップを含むことを特徴とする請求項5又は6に記載の表面形状計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011021620A JP5669195B2 (ja) | 2011-02-03 | 2011-02-03 | 表面形状計測装置、及び表面形状計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011021620A JP5669195B2 (ja) | 2011-02-03 | 2011-02-03 | 表面形状計測装置、及び表面形状計測方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012163346A true JP2012163346A (ja) | 2012-08-30 |
| JP5669195B2 JP5669195B2 (ja) | 2015-02-12 |
Family
ID=46842882
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011021620A Expired - Fee Related JP5669195B2 (ja) | 2011-02-03 | 2011-02-03 | 表面形状計測装置、及び表面形状計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5669195B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101456565B1 (ko) | 2014-05-28 | 2014-10-31 | 하상우 | 도로포장 손상 조사 및 분석 시스템, 그리고 도로포장 손상 조사 및 분석 방법 |
| JP2016217801A (ja) * | 2015-05-18 | 2016-12-22 | エヌ・ティ・ティ・アドバンステクノロジ株式会社 | 全方位移動型ロボットと3次元カメラシステムによる変状検知システム |
| JP2017066620A (ja) * | 2015-09-28 | 2017-04-06 | 倉敷紡績株式会社 | 構造物検査システム |
| WO2019100700A1 (en) * | 2017-11-24 | 2019-05-31 | Guangdong Kang Yun Technologies Limited | Portable 3d scanning systems and scanning methods |
| KR102052203B1 (ko) * | 2019-06-20 | 2019-12-04 | (주)케이에스알큰사람 | 라인 카메라를 이용한 도로 포장면의 안전 진단 시스템 |
| JP2021523496A (ja) * | 2018-11-19 | 2021-09-02 | 炬星科技(深▲せん▼)有限公司Syrius Robotics Co., Ltd. | ロボットのセンサ配置システム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6395307A (ja) * | 1986-10-10 | 1988-04-26 | Tokyo Keiki Co Ltd | 路面凹凸計測装置 |
| JP2004053427A (ja) * | 2002-07-22 | 2004-02-19 | Shikoku Kakoki Co Ltd | 溶接ビードの品質評価方法およびそのための形状測定方法 |
| JP2005070840A (ja) * | 2003-08-25 | 2005-03-17 | East Japan Railway Co | 三次元モデル作成装置、三次元モデル作成方法、及び三次元モデル作成プログラム |
| JP3837431B2 (ja) * | 2004-07-26 | 2006-10-25 | 国立大学法人 宮崎大学 | 管内面形状測定装置 |
| JP2009236754A (ja) * | 2008-03-27 | 2009-10-15 | Fukuoka Prefecture | ひずみ計測方法、ひずみ計測システム |
| JP2010223710A (ja) * | 2009-03-23 | 2010-10-07 | Univ Of Miyazaki | 管内面形状測定装置 |
-
2011
- 2011-02-03 JP JP2011021620A patent/JP5669195B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6395307A (ja) * | 1986-10-10 | 1988-04-26 | Tokyo Keiki Co Ltd | 路面凹凸計測装置 |
| US4896964A (en) * | 1986-10-10 | 1990-01-30 | Tokyo Keiki Co., Ltd. | System for measuring irregularities of road surface |
| JP2004053427A (ja) * | 2002-07-22 | 2004-02-19 | Shikoku Kakoki Co Ltd | 溶接ビードの品質評価方法およびそのための形状測定方法 |
| JP2005070840A (ja) * | 2003-08-25 | 2005-03-17 | East Japan Railway Co | 三次元モデル作成装置、三次元モデル作成方法、及び三次元モデル作成プログラム |
| JP3837431B2 (ja) * | 2004-07-26 | 2006-10-25 | 国立大学法人 宮崎大学 | 管内面形状測定装置 |
| JP2009236754A (ja) * | 2008-03-27 | 2009-10-15 | Fukuoka Prefecture | ひずみ計測方法、ひずみ計測システム |
| JP2010223710A (ja) * | 2009-03-23 | 2010-10-07 | Univ Of Miyazaki | 管内面形状測定装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101456565B1 (ko) | 2014-05-28 | 2014-10-31 | 하상우 | 도로포장 손상 조사 및 분석 시스템, 그리고 도로포장 손상 조사 및 분석 방법 |
| JP2016217801A (ja) * | 2015-05-18 | 2016-12-22 | エヌ・ティ・ティ・アドバンステクノロジ株式会社 | 全方位移動型ロボットと3次元カメラシステムによる変状検知システム |
| JP2017066620A (ja) * | 2015-09-28 | 2017-04-06 | 倉敷紡績株式会社 | 構造物検査システム |
| WO2019100700A1 (en) * | 2017-11-24 | 2019-05-31 | Guangdong Kang Yun Technologies Limited | Portable 3d scanning systems and scanning methods |
| JP2021523496A (ja) * | 2018-11-19 | 2021-09-02 | 炬星科技(深▲せん▼)有限公司Syrius Robotics Co., Ltd. | ロボットのセンサ配置システム |
| KR102052203B1 (ko) * | 2019-06-20 | 2019-12-04 | (주)케이에스알큰사람 | 라인 카메라를 이용한 도로 포장면의 안전 진단 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5669195B2 (ja) | 2015-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4871352B2 (ja) | 3次元スキャンの自動参照システム及び装置 | |
| US9188430B2 (en) | Compensation of a structured light scanner that is tracked in six degrees-of-freedom | |
| EP2438397B1 (en) | Method and device for three-dimensional surface detection with a dynamic reference frame | |
| EP2654606B1 (en) | Motion blur compensation | |
| JP5669195B2 (ja) | 表面形状計測装置、及び表面形状計測方法 | |
| CN109764858B (zh) | 一种基于单目相机的摄影测量方法及系统 | |
| CN110296667A (zh) | 基于线结构光多角度投影的高反射表面三维测量方法 | |
| JP5648831B2 (ja) | 内面形状測定装置、及び内面形状測定方法 | |
| JP7353757B2 (ja) | アーチファクトを測定するための方法 | |
| JP2022171677A5 (ja) | ||
| JP2010190886A (ja) | パンタグラフ高さ測定装置及びそのキャリブレーション方法 | |
| KR100394208B1 (ko) | 인체를 계측하는 장치 및 방법 | |
| KR101090082B1 (ko) | 단일 카메라 및 레이저를 이용한 계단 치수 측정 시스템 및 방법 | |
| CN107687821B (zh) | 用于深孔洞旋转件形貌测量的多相机光刀系统标定方法 | |
| JP4619962B2 (ja) | 路面標示計測システム、白線モデル計測システムおよび白線モデル計測装置 | |
| JP2012013592A (ja) | 3次元形状測定機の校正方法及び3次元形状測定機 | |
| Wang et al. | The 3D reconstruction method of a line-structured light vision sensor based on composite depth images | |
| JP2009042147A (ja) | 物体認識装置および物体認識方法 | |
| CN114663486A (zh) | 一种基于双目视觉的建筑物测高方法及系统 | |
| JP2004309318A (ja) | 位置検出方法、その装置及びそのプログラム、並びに、較正情報生成方法 | |
| JP2017111118A (ja) | 3dスキャナからの2次元(2d)スキャンデータに基づく3次元(3d)スキャン間の位置合せ計算 | |
| Senjalia et al. | Measurement of wheel alignment using Camera Calibration and Laser Triangulation | |
| KR101436097B1 (ko) | 레이저 센서 기반 비접촉식 6-자유도 운동 측정 방법 | |
| Liu et al. | Rapid calibration method for 3D laser scanner | |
| CN118500264B (zh) | 基于激光三角法的速度和距离同步测量系统及方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140313 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140916 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141202 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5669195 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |