JP2012163407A - 位置決め装置 - Google Patents
位置決め装置 Download PDFInfo
- Publication number
- JP2012163407A JP2012163407A JP2011023084A JP2011023084A JP2012163407A JP 2012163407 A JP2012163407 A JP 2012163407A JP 2011023084 A JP2011023084 A JP 2011023084A JP 2011023084 A JP2011023084 A JP 2011023084A JP 2012163407 A JP2012163407 A JP 2012163407A
- Authority
- JP
- Japan
- Prior art keywords
- movement
- measurement value
- correction
- moving
- correction map
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Control Of Position Or Direction (AREA)
Abstract
【解決手段】位置決め装置のコントローラは、正方向用の補正マップと逆方向用の補正マップ、及び、移動台を移動させる際の基準位置を記憶している。コントローラは、以下の処理、即ち、(1)移動台が基準位置から既定の閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する更新処理、(2)基準位置と目標位置との間の距離が閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が閾値未満であり、かつ、最新の基準位置が設定されてから1回は移動方向が反転している場合には、両方向の補正マップを用いてセンサによる位置計測値を補正する補正処理、(3)補正後の位置計測値を目標位置に一致させる制御処理と、を実行する。
【選択図】図4
Description
(1)移動台を基準位置から既定の移動量閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する基準位置更新処理。
(2)基準位置と目標位置との間の距離が移動量閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が移動量閾値未満であり、かつ、最新の基準位置が設定されてから少なくとも1回は移動方向が反転している場合には、両方向用の補正マップを用いてセンサによる位置計測値を補正する補正処理。ここで、「最新の基準位置が設定されてから少なくとも1回は移動方向が反転している場合」には、移動台の現在位置から目標位置への移動方向が、直前の移動方向(即ち、現在位置へ移動してきたときの移動方向)と異なる場合、即ち、次の移動で反転が生じる場合を含む。
(3)移動台の補正後の位置計測値が目標位置に一致するようにアクチュエータを制御する駆動制御処理。
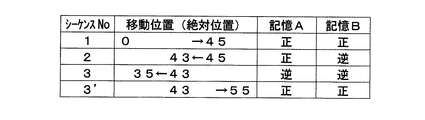
(1)後述する移動方向記憶A=Bの状態で移動方向(次に移動する予定の方向)が前回の移動方向と逆方向であり、かつ、現在位置から目標位置への移動距離が、移動量閾値以下の場合に、移動前の位置を新たな基準位置に設定する基準位置更新処理。
(2)基準位置と目標位置との間の距離が移動量閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が移動量閾値未満であり、かつ、最新の基準位置が設定されてから少なくとも1回は移動方向が反転している場合には、両方向用の補正マップを用いてセンサによる位置計測値を補正する補正処理。ここで、「最新の基準位置が設定されてから少なくとも1回は移動方向が反転している場合」には、移動台の現在位置から目標位置への移動方向が、直前の移動方向(即ち、現在位置へ移動してきたときの移動方向)と異なる場合、即ち、次の移動で反転が生じる場合を含む。
(3)移動台の補正後の位置計測値が目標位置に一致するようにアクチュエータを制御する駆動制御処理。
[移動方向記憶Bの重み]=|移動方向記憶A基準位置−目標位置|/移動量閾値
最終演算値=[移動方向記憶Aの重み]×[移動方向記憶Aが示す移動方向に対応する移動方向の補正量]+[移動方向記憶Bの重み]×[移動方向記憶Bが示す移動方向に対応する移動方向の補正量]
4:リニアスケール(位置を計測するセンサ)
6:モータ(アクチュエータ)
10:コントローラ
12:I/O
14:モータドライバ
16:CPU
18:記憶装置
100:位置決め装置
Claims (2)
- 位置決め装置であり、
移動台を正方向と逆方向のいずれの方向にも移動させることができるアクチュエータと、
移動台の位置を計測するセンサと、
センサによる位置計測値に基づいて移動台を目標位置へ移動させるコントローラと、
を備えており、コントローラは、
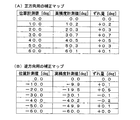
移動台を正方向に移動させた場合における移動台の正確な位置とセンサによる位置計測値とのずれ量を複数の位置にて予め計測して対応付けた正方向用の補正マップと、
移動台を逆方向に移動させた場合における移動台の正確な位置とセンサによる位置計測値とのずれ量を複数の位置にて予め計測して対応付けた逆方向用の補正マップと、
移動台を移動させる際の基準位置と、
を記憶しているとともに、以下の処理、即ち、
移動台を基準位置から既定の移動量閾値以上離れた位置に移動した場合に移動先の位置を新たな基準位置に設定する基準位置更新処理と、
基準位置と目標位置との間の距離が移動量閾値以上の場合には、現在位置から目標位置への移動方向と同一方向用の補正マップを用いてセンサによる位置計測値を補正し、基準位置と目標位置との間の距離が移動量閾値未満であり、かつ、最新の基準位置が設定されてから少なくとも1回は移動方向が反転している場合には、両方向用の補正マップを用いてセンサによる位置計測値を補正する補正処理と、
補正後の位置計測値が目標位置に一致するようにアクチュエータを制御する駆動制御処理と、
を実行することを特徴とする位置決め装置。 - コントローラは、両方向用の補正マップを用いてセンサによる位置計測値を補正する場合、正方向用の補正マップに基づく補正量と逆方向用の補正マップに基づく補正量の平均値によって、センサによる位置計測値を補正することを特徴とする請求項1に記載の位置決め装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011023084A JP5648511B2 (ja) | 2011-02-04 | 2011-02-04 | 位置決め装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011023084A JP5648511B2 (ja) | 2011-02-04 | 2011-02-04 | 位置決め装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012163407A true JP2012163407A (ja) | 2012-08-30 |
| JP5648511B2 JP5648511B2 (ja) | 2015-01-07 |
Family
ID=46842936
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011023084A Expired - Fee Related JP5648511B2 (ja) | 2011-02-04 | 2011-02-04 | 位置決め装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5648511B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107339961A (zh) * | 2016-12-20 | 2017-11-10 | 北京小米移动软件有限公司 | 校准距离传感器的方法及装置、电子设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61192452A (ja) * | 1985-02-21 | 1986-08-27 | Fanuc Ltd | 位置監視方法 |
| JPH0772913A (ja) * | 1993-09-03 | 1995-03-17 | Fanuc Ltd | 工作機械の誤差補正方式 |
| JPH10111706A (ja) * | 1996-10-08 | 1998-04-28 | Tokyo Seimitsu Co Ltd | 数値制御工作機械の自動測定装置 |
| JP2010026997A (ja) * | 2008-07-24 | 2010-02-04 | Mitsubishi Heavy Ind Ltd | 工作機械 |
-
2011
- 2011-02-04 JP JP2011023084A patent/JP5648511B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61192452A (ja) * | 1985-02-21 | 1986-08-27 | Fanuc Ltd | 位置監視方法 |
| JPH0772913A (ja) * | 1993-09-03 | 1995-03-17 | Fanuc Ltd | 工作機械の誤差補正方式 |
| JPH10111706A (ja) * | 1996-10-08 | 1998-04-28 | Tokyo Seimitsu Co Ltd | 数値制御工作機械の自動測定装置 |
| JP2010026997A (ja) * | 2008-07-24 | 2010-02-04 | Mitsubishi Heavy Ind Ltd | 工作機械 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107339961A (zh) * | 2016-12-20 | 2017-11-10 | 北京小米移动软件有限公司 | 校准距离传感器的方法及装置、电子设备 |
| CN107339961B (zh) * | 2016-12-20 | 2019-08-06 | 北京小米移动软件有限公司 | 校准距离传感器的方法及装置、电子设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5648511B2 (ja) | 2015-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6167622B2 (ja) | 制御システムおよび制御方法 | |
| CN102909728B (zh) | 机器人工具中心点的视觉校正方法 | |
| JP5632036B2 (ja) | Cnc工作機械の誤差を補正する装置 | |
| US8831777B2 (en) | Robot program changing device | |
| CN111185901B (zh) | 机器人装置 | |
| CN111390901B (zh) | 机械臂自动标定方法以及标定装置 | |
| CN103538061A (zh) | 机器人系统、机器人、机器人控制装置及方法以及程序 | |
| JP6703038B2 (ja) | 数値制御装置 | |
| CN104039511A (zh) | 摄像检查装置及该摄像检查装置的控制装置及控制方法 | |
| JP2006110705A (ja) | ロボットのキャリブレーション方法 | |
| US10697748B2 (en) | Method for controlling shape measuring apparatus | |
| US10569418B2 (en) | Robot controller for executing calibration, measurement system and calibration method | |
| JP5531182B2 (ja) | 位置決め装置のキャリブレーション方法、位置決め装置、およびこれらのためのコンピュータプログラム | |
| JP6528913B1 (ja) | 補正関数生成装置、ロボット制御システム及びロボットシステム | |
| KR20200057503A (ko) | 로봇 보정 시스템 및 그것의 보정 방법 | |
| JP6485620B2 (ja) | ロボット制御システムおよびロボット制御方法 | |
| CN108089441A (zh) | 空间拍机次镜六自由度精密调整机构标定算法和存储介质 | |
| JP2006049755A (ja) | 回転中心算出方法およびこの方法を用いたワーク位置決め装置 | |
| JP5634764B2 (ja) | 移動体制御システム、プログラム、及び移動体制御方法 | |
| JP5648511B2 (ja) | 位置決め装置 | |
| CN118287866A (zh) | 基于视觉针对五轴激光切割机实现bc轴双摆头基准设定处理的方法、装置、处理器及介质 | |
| US11999068B2 (en) | Control device and alignment device | |
| CN102749094B (zh) | 特大齿轮在位姿态调整系统及方法 | |
| KR102683350B1 (ko) | 제어 시스템, 제어 방법 및 컴퓨터 판독 가능한 기억 매체 | |
| US12587743B2 (en) | Position detection and control of a movable body including an optical element |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140310 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140409 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141014 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141027 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5648511 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |