JP2012184850A - アクチュエータ装置およびこれを用いるロボット装置 - Google Patents
アクチュエータ装置およびこれを用いるロボット装置 Download PDFInfo
- Publication number
- JP2012184850A JP2012184850A JP2012127375A JP2012127375A JP2012184850A JP 2012184850 A JP2012184850 A JP 2012184850A JP 2012127375 A JP2012127375 A JP 2012127375A JP 2012127375 A JP2012127375 A JP 2012127375A JP 2012184850 A JP2012184850 A JP 2012184850A
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- actuator
- actuator device
- base
- force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 55
- 230000033001 locomotion Effects 0.000 claims abstract description 14
- 230000002452 interceptive effect Effects 0.000 claims description 3
- 238000005452 bending Methods 0.000 abstract description 2
- 230000008878 coupling Effects 0.000 abstract 1
- 238000010168 coupling process Methods 0.000 abstract 1
- 238000005859 coupling reaction Methods 0.000 abstract 1
- 230000008602 contraction Effects 0.000 description 28
- 238000010586 diagram Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 210000003205 muscle Anatomy 0.000 description 6
- 230000009467 reduction Effects 0.000 description 5
- 238000011144 upstream manufacturing Methods 0.000 description 5
- 239000003638 chemical reducing agent Substances 0.000 description 4
- 239000000284 extract Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000003042 antagnostic effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 210000002414 leg Anatomy 0.000 description 2
- 229920005594 polymer fiber Polymers 0.000 description 2
- 238000010248 power generation Methods 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 210000004394 hip joint Anatomy 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 210000001503 joint Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 210000000323 shoulder joint Anatomy 0.000 description 1
Images








Landscapes
- Manipulator (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
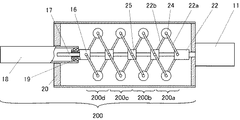
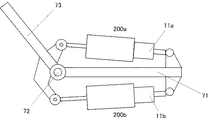
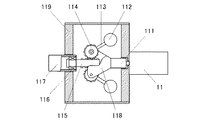
【解決手段】モータの回転を線方向の動作に変換するアクチュエータ装置において、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記錘部材と前記回転基部および摺動基部をそれぞれ回動可能に連結する2本のリンク棒を有し、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上設けて構成する。
【選択図】 図1
Description
12 回転基部
13 リンク機構
14 錘部材
15 摺動基部
18 出力端
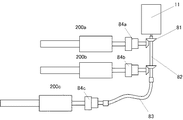
100、200、300 アクチュエータユニット
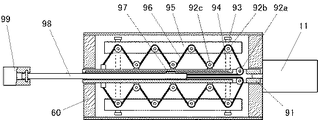
56 外殻リンク
84 クラッチ
94 スプリング
96 ワイヤ
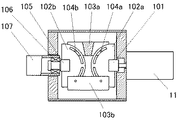
102 スリット板
104 ピン
114 歯車
115 ラック軸
Claims (6)
- モータの回転を線方向の動作に変換するアクチュエータ装置であって、
モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記錘部材と前記回転基部および摺動基部をそれぞれ回動可能に連結する2本のリンク棒を有し、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上具えることを特徴とするアクチュエータ装置。 - モータの回転を概略線方向の動作に変換するアクチュエータ装置であって、
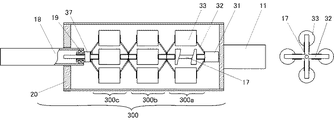
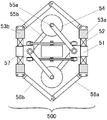
モータに直接または間接的に接続されて回転する2つの回転基部(51、57)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(54)と、前記錘部材と前記回転基部および摺動基部をそれぞれ回動可能に連結する2本のリンク棒を有し、前記遠心力を利用して前記2つの回転基部の距離を変更するリンク機構(55)と、前記錘部材およびリンク機構の回転に干渉することなく前記2つの回転基部を連結するフレキシブルカバー(56)を有するユニットを複数具え、前記2つの回転基部の回転軸が一致しない状態でも伸縮することを特徴とするアクチュエータ装置。 - 請求項1に記載のアクチュエータ装置において、前記ユニットが複数連設されており、各ユニットが回転を伝達する自在継手で連結されていることを特徴とするアクチュエータ装置。
- 多軸の駆動を行うアクチュエータ装置であって、単一の回転モータに請求項1乃至3のいずれか1項に記載のアクチュエータ装置を複数接続してこれらに動力を分配してなることを特徴とするアクチュエータ装置。
- 請求項1乃至3のいずれか1項に記載のアクチュエータ装置を関節駆動に適用したことを特徴とするロボット装置。
- 請求項5に記載のロボット装置において、1以上の回転自由度を有する関節に請求項1乃至4のいずれか1項に記載のアクチュエータ装置を複数設けてなることを特徴とするロボット装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012127375A JP5437444B2 (ja) | 2012-06-04 | 2012-06-04 | アクチュエータ装置およびこれを用いるロボット装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012127375A JP5437444B2 (ja) | 2012-06-04 | 2012-06-04 | アクチュエータ装置およびこれを用いるロボット装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007287751A Division JP5080207B2 (ja) | 2007-11-05 | 2007-11-05 | アクチュエータ装置およびこれを用いるロボット装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012184850A true JP2012184850A (ja) | 2012-09-27 |
| JP5437444B2 JP5437444B2 (ja) | 2014-03-12 |
Family
ID=47015094
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012127375A Expired - Fee Related JP5437444B2 (ja) | 2012-06-04 | 2012-06-04 | アクチュエータ装置およびこれを用いるロボット装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5437444B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105972172A (zh) * | 2016-07-07 | 2016-09-28 | 浙江腾荣环保科技有限公司 | 一种带有t型推力杆的推力装置 |
| CN105972173A (zh) * | 2016-07-07 | 2016-09-28 | 浙江腾荣环保科技有限公司 | 一种推力装置 |
| CN106015485A (zh) * | 2016-07-07 | 2016-10-12 | 浙江腾荣环保科技有限公司 | 一种带有顶位组件的推力装置 |
| CN109516190A (zh) * | 2018-11-20 | 2019-03-26 | 东台市海邦电气有限公司 | 搬运机器人爪轴软截连接装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107671843A (zh) * | 2017-11-07 | 2018-02-09 | 广西大学 | 一种曲柄滑块为折展单元柔性铰链连接的空间折展机构 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4956050A (ja) * | 1972-09-30 | 1974-05-30 | ||
| JP2000246675A (ja) * | 1999-02-26 | 2000-09-12 | Hitachi Zosen Corp | ロボット装置 |
| JP2001008407A (ja) * | 1999-04-22 | 2001-01-12 | Japan Servo Co Ltd | 駆動電動機 |
| JP2001234999A (ja) * | 2000-02-21 | 2001-08-31 | Advanced Technology Inst Of Commuter Helicopter Ltd | 軸力発生装置およびトラクション変速装置 |
| JP2004215454A (ja) * | 2002-12-20 | 2004-07-29 | Tai-Her Yang | 遠心力によって回転子の軸方向作動の調整制御を行う電機 |
| JP2006102886A (ja) * | 2004-10-06 | 2006-04-20 | Nidec Sankyo Corp | ロボット |
| JP2007151361A (ja) * | 2005-11-30 | 2007-06-14 | Nissei Corp | モータ付直交軸減速機、直交軸減速機、及び、ロボットの関節構造 |
-
2012
- 2012-06-04 JP JP2012127375A patent/JP5437444B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4956050A (ja) * | 1972-09-30 | 1974-05-30 | ||
| JP2000246675A (ja) * | 1999-02-26 | 2000-09-12 | Hitachi Zosen Corp | ロボット装置 |
| JP2001008407A (ja) * | 1999-04-22 | 2001-01-12 | Japan Servo Co Ltd | 駆動電動機 |
| JP2001234999A (ja) * | 2000-02-21 | 2001-08-31 | Advanced Technology Inst Of Commuter Helicopter Ltd | 軸力発生装置およびトラクション変速装置 |
| JP2004215454A (ja) * | 2002-12-20 | 2004-07-29 | Tai-Her Yang | 遠心力によって回転子の軸方向作動の調整制御を行う電機 |
| JP2006102886A (ja) * | 2004-10-06 | 2006-04-20 | Nidec Sankyo Corp | ロボット |
| JP2007151361A (ja) * | 2005-11-30 | 2007-06-14 | Nissei Corp | モータ付直交軸減速機、直交軸減速機、及び、ロボットの関節構造 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105972172A (zh) * | 2016-07-07 | 2016-09-28 | 浙江腾荣环保科技有限公司 | 一种带有t型推力杆的推力装置 |
| CN105972173A (zh) * | 2016-07-07 | 2016-09-28 | 浙江腾荣环保科技有限公司 | 一种推力装置 |
| CN106015485A (zh) * | 2016-07-07 | 2016-10-12 | 浙江腾荣环保科技有限公司 | 一种带有顶位组件的推力装置 |
| CN105972172B (zh) * | 2016-07-07 | 2018-06-12 | 浙江腾荣环保科技有限公司 | 一种带有t型推力杆的推力装置 |
| CN106015485B (zh) * | 2016-07-07 | 2018-06-12 | 浙江腾荣环保科技有限公司 | 一种带有顶位组件的推力装置 |
| CN105972173B (zh) * | 2016-07-07 | 2018-07-31 | 浙江腾荣环保科技有限公司 | 一种推力装置 |
| CN109516190A (zh) * | 2018-11-20 | 2019-03-26 | 东台市海邦电气有限公司 | 搬运机器人爪轴软截连接装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5437444B2 (ja) | 2014-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5437444B2 (ja) | アクチュエータ装置およびこれを用いるロボット装置 | |
| JP7142398B2 (ja) | 高統合度かつ高性能のロボット関節モジュール | |
| Jafari et al. | AwAS-II: A new actuator with adjustable stiffness based on the novel principle of adaptable pivot point and variable lever ratio | |
| Yu et al. | Control design of a novel compliant actuator for rehabilitation robots | |
| KR102154391B1 (ko) | 그리퍼 장치 | |
| US20130131815A1 (en) | Mechanical capstan amplifier | |
| US11897122B2 (en) | Robot hand | |
| EP3449146B1 (en) | Multimode control system for magnetorheological fluid actuator unit | |
| CN102196785A (zh) | 仿生机械关节 | |
| JP5503702B2 (ja) | シリアルロボットのための低ストローク作動 | |
| CN111390892A (zh) | 一种基于气动肌肉的全驱动仿生灵巧手 | |
| WO2015063524A1 (en) | Twisted cord actuating system for robotic arm | |
| KR101261986B1 (ko) | 듀얼 모드 줄꼬임 액츄에이터 | |
| CN108621197B (zh) | 一种用于绳驱动机器人的变刚度控制装置 | |
| CN111923068B (zh) | 一种腱传动仿人灵巧手的手指关节 | |
| JPWO2017033885A1 (ja) | モータ駆動ハンド | |
| JP5080207B2 (ja) | アクチュエータ装置およびこれを用いるロボット装置 | |
| KR101695789B1 (ko) | Mr브레이크를 이용한 가변강성 액추에이터 구동모듈 | |
| JP2020196091A (ja) | トルク制御が可能なサーボモーター装置システム | |
| EP2286115B1 (en) | High torque limited angle compact and lightweight actuator | |
| CN111643234A (zh) | 一种基于双输出缠绕绳驱动器的假肢手 | |
| CN223849268U (zh) | 一种机器人手指弯曲调节机构 | |
| CN119017415A (zh) | 手指结构总成、机械手 | |
| CN105382844B (zh) | 一种基于时序控制的多自由度机械手 | |
| JP2006224229A (ja) | ロボットハンド |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130528 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130722 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131211 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |