本発明はアクチュエータ装置およびこれを用いるロボット装置に関し、特に、剛性可変型アクチュエータ装置およびこれを用いる人間型や動物型のロボット装置に関する。
従来、例えば人間型ロボットの関節駆動において、電気モータと歯車などによる減速装置とを組み合わせた回転型のアクチュエータや、油圧装置等が使用されている。このなかでも、小型化や制御が容易なDCモータ等の電気モータと減速器の組合せが広く用いられている。
このような人間型や動物型のロボットでは、手で物を掴んだり、重量物を持ち上げた状態を維持するなど、持続的に大きな力を発生することが考えられる。また、力を出すだけではなく、外界の状況に応じて力を加減したり、時には力を抜いて外力を受け流すといった柔軟な対応も重要である。例えばドアを開ける動作を考えると、力を入れてドアを引いた後は、ドアの開く軌道に逆らわずに腕を動かさねばならない。すなわち、ロボットの動作をより人間に近づけるには、連続的に大きな力を発生可能で、素早く動作するとともに、外力に逆らわない力を抜いた弛緩状態を再現できるようにすることが重要となる。
遠心力を用いた駆動機構に関連する技術として、回転速度が過大となった場合に遠心力で軸方向に永久磁石が移動するようにしてブレーキ力を調整する駆動電動機が提案されている(例えば、特許文献1)。また、遠心力によってモータ回転子の位置を調整しモータの特性そのものを変化させる調速機構が提案されている(例えば、特許文献2)。
特開2001−8407(特に図6)
特開2004−215454
従来の油圧システムでは、持続的に大きな力を発生することは容易であるが、作動速度がその分遅くなる問題がある。また、従来の電気モータと減速器の組合せでは、例えばロボットが荷物を持ち上げたまま維持する動作のような定常的に関節に負荷がかかる動作では、電気モータが停動状態になり効率が悪いという問題がある。すなわち、電気モータは同じ電圧を印加したしたとき回転が停止している停動状態で最大の電流が流れ、電気モータに投入した電力はすべてコイルで熱として消費されるため、非常に効率が悪くなるとともに、電流が大きい場合にこの状態が続くと電気モータの電磁コイルが焼損するおそれもある。この場合に高減速比の減速器を用いて電気モータの負担を減らすことが考えられるが、停動状態では投入電力がすべてコイルで熱として消費されることに変わりはなく、さらに関節の動作速度が遅くなるという不都合が生じる。
また、従来の装置では力を抜いたり外力に柔軟に対応する動作がうまくできないという問題がある。すなわち、油圧装置で力を抜く動作を再現するには別個に装置が必要となり、装置の発生力が大きいほど規模が大きく嵩張ることになってしまう。また、電気モータと減速器の組合せでは、減速比の大きな減速器を用いている場合には外部から関節を動かすことが困難である。これを回避すべく高出力電気モータを使用したり変速装置を使うことが考えられるが、著しくエネルギ消費が大きくなったり構造が複雑となり装置が大型化する問題がある。
また、例えば人間の肩関節では、関節部に沿って複数の筋肉が湾曲配置されており、この筋肉が個別に湾曲したまた収縮することで肩部の広範な可動機能を実現している。このように湾曲したまた収縮するという筋肉の機能を再現するアクチュエータがあれば、アクチュエータ配置の自由度が大きくなるとともに、人間の筋肉の動きを忠実に再現することが可能となり、人間や動物型のロボットを構成する上での便宜となる。
さらに、動力の利用率向上のため、油圧システムのように、電気モータを用いて大きな動力を多軸に分配しようとしても、分配を制御する電磁クラッチは小さなトルクしか伝導できず、また減速機構が必要となるため、重量やスペースの問題において結局は各駆動軸に電気モータを配置するのと変わらなくなってしまう。モータの高速小トルクの動力を簡単な構成で多軸に分配し大きなトルクで利用できるシステムがあれば便宜となる。
本発明は上記のような問題を鑑み、動力停止時には外力により関節等を容易に動かすことができ、定常的に大きな負荷が作用した場合にも効率を損なわないアクチュエータ装置およびこれを用いるロボット装置を提供することを目的とする。また、アクチュエータ自体を湾曲設置可能として柔軟に配置できるようにしたアクチュエータおよびロボット装置を提供することを目的とする。
上記目的を達成すべく、本発明の一態様にかかるアクチュエータ装置は、モータの回転を線方向の動作に変換するアクチュエータ装置であって、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上具えることを特徴とする。
本発明の一実施例では、前記回転軸上に前記ユニットが複数連設されている。
ユニットが複数連設された実施例のアクチュエータ装置では、前記リンク機構は、隣接するユニットの反対側の錘部材を連結するレージトング式のリンク機構とすることが望ましい。
また、本発明の別の態様にかかるアクチュエータ装置は、モータの回転を概略線方向の動作に変換するアクチュエータ装置であって、モータに直接または間接的に接続されて回転する回転基部(51または57)と、当該回転基部との距離が変更可能に設けられた摺動基部(57)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(54)と、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(55)と、前記錘部材およびリンク機構の回転に干渉することなく前記回転基部と摺動基部とを連結するフレキシブルカバー(56)を有するユニットを1以上具え、前記回転基部と摺動基部の回転軸が必ずしも一致しない状態で伸縮することを特徴とする。
本発明の別の実施例のアクチュエータ装置は、各ユニットが自在継手で連結されている。
本発明のさらなる実施例は、多軸の駆動を行うアクチュエータ装置であって、単一の回転モータに請求項1乃至5のいずれか1項に記載のアクチュエータ装置を複数接続してこれらに動力を分配してなることを特徴とするアクチュエータ装置に関する。
さらに本発明は、上記いずれかのアクチュエータ装置を関節駆動に適用したことを特徴とするロボット装置に関する。
このロボット装置において、1以上の回転自由度を有する関節に請求項1乃至6のいずれか1項に記載のアクチュエータ装置を複数設けてなることが望ましい。
本発明にかかるアクチュエータ装置は、モータの回転により錘部材を回転させ、その遠心力とリンク機構で回転基部と摺動基部の間が狭まり、結果として出力端を軸方向に引っ張る力が生じる。このアクチュエータ装置は、アクチュエータの伸びに比例して収縮力が増大するバネ特性を有し、その剛性は回転速度の二乗に比例する。したがって、小型の電気モータでも簡単な機構で大きな力を得ることができる。また、例えばこのアクチュエータ装置をロボットが物を持ち上げたまま保持する動作に利用した場合、ロボット自体が停動状態でも電気モータは高速回転を維持して張力を発生し続け電気モータは停動状態とならないため、電磁コイルが焼損することなく持続的に大きな力を発生可能である。さらに、このように大きな力を持続的に発生している場合でも消費するエネルギは電気モータの回転を維持するものだけであるためエネルギの損失が少ない。また機構的にバネ特性を有するためその動きが柔軟であり、衝撃などをアクチュエータ自体が吸収することも可能であることから、装置やシステムの耐久性が向上する。さらに、モータの停止時には外力で容易に動かすことができ、例えば人型ロボットにおける力を抜いた状態を再現することができる。また、動力発生中であっても発生力を越える外力を受けた場合にはモータの回転(遠心力)を維持しつつ外力に従順すなわち牽引方向と逆方向に動作させることができるとともに、この場合にもモータが停動または逆回転することがないため機構が損壊することがない。したがって、特に人間型ロボットに求められる動作に適したアクチュエータを得ることができる。
また、本発明にかかる別のアクチュエータ装置は、回転基部と摺動基部が軸材で連結されておらず、錘部材とリンク機構の回転に干渉することなくその外側から回転基部と摺動基部とを連結するフレキシブルカバーを具えることにより、アクチュエータ装置自体を湾曲させた状態で収縮させることができる。これにより人間や動物の筋肉のように湾曲配置させたまま収縮させることができ、配置の自由度や動作の自然さを向上することが可能となる。
また、1つのアクチュエータユニットで可動範囲を長く取ろうとすると装置が大きくなってしまうが、小さなアクチュエータユニットを複数連設してアクチュエータ装置を構成すると、所望の可動範囲を確保しつつ装置を小さく収めることができる。
また、アクチュエータユニットを複数連設してレージトング式のリンク機構で各錘部材を連結すると、ユニット毎の収縮量が一定となり安定した動作および出力を得ることができる。
一方、複数のアクチュエータユニットを、回転を伝達する自在継手で連結してアクチュエータ装置を構成すると、全体を自在に曲がった状態で配置しその延在方向に沿って収縮させることができるため、例えば腕や足など不規則に曲がる部位にも角度に沿って配置することができ、利便性や省スペース化に寄与する。
また、単一のモータで複数のアクチュエータ装置に動力を分配して構成すると、複数の可動部を単一のモータで駆動することが可能となり、省スペースと省電力を達成することができる。
上記アクチュエータを採用する本発明にかかるロボット装置は、上述したようにより人間の動作に近い動作を実現することができ、力を入れつつ外力にも逆らわないような自然な動作が可能となる。また、1以上の回転自由度を有する関節に複数のアクチュエータ装置を設けることにより、力を拮抗させて停動状態としたり一方および/または双方のアクチュエータを制御して細かい動作を実現することが可能となる。これには例えば、1軸の関節における2つの回動方向にそれぞれ1つづつアクチュエータ装置を設けたり、肩や股関節など多軸の関節に3以上のアクチュエータ装置を拮抗させて用いたりすることが含まれる。
本発明を実施するための最良の実施形態について図面を参照しながら以下に詳細に説明する。
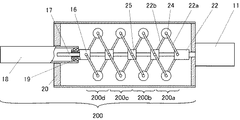
図1は、本発明にかかるアクチュエータ装置の第1実施例を示す図である。本実施例のアクチュエータ装置100は、電気モータ11の回転出力により生じる遠心力を用いて出力端18の軸方向の収縮動作を得るものである。このアクチュエータ装置100は、3つのアクチュエータユニット100a〜100cを連設して構成されている。上流側のユニット100aは電気モータ11に直接接続され、下流側のユニット100cは出力端18に接続されている。すべてのユニット100a〜100cと出力端18は同軸上に配置されており、これらを主軸17が貫いている。電気モータ11は図示しない制御部により制御され、オン/オフ切り替えの他に回転速度の調整、電磁ブレーキによる停止も可能である。
ユニット100aから説明する。最も上流側の回転基部12は、電気モータ11の出力シャフトと主軸17と連結されており、これらは電気モータ11の回転により一体的に回転する。一方、摺動基部15は主軸17に対しスライド可能に構成されている。ここで、主軸17をスプライン軸としたりキー/溝構造を介するなどして摺動基部15を主軸17に通し、主軸17が摺動基部15に回転を伝達するとともに摺動基部15が主軸17の軸方向に自由にスライドできるようにする。ただし、本実施例ではリンク機構13により回転基部12から摺動基部15に回転が伝達されるためこのスプライン係合は必須ではなく、主軸17は単なる丸棒であってもよい。また主軸17上で摺動基部15がスライド可能であれば他の様々な構成であってもよく、例えば、主軸17の断面を多角形として摺動基部15の貫通口をこれに対応する形状としてもよい。
図1に示すように、回転基部12と摺動基部15は、パンタグラフ型のリンク機構13により連結されており、リンク機構13の屈曲部には錘部材14が設けられている。リンク機構13は回転基部12、摺動基部15、錘部材14のいずれに対しても自由に回動可能であり、主軸17を挟んで対称的に設けられている。本実施例の場合は2セットのリンク機構13が対称的に設けられているが、断面において重心が中央(すなわち回転軸)にある構成であれば断面三菱型、断面十字形、それ以上の構成であってもよい。
このように構成されたアクチュエータユニット100aの動作を説明する。電気モータ11が回転していない場合、摺動基部15は他の要素との関係で定まる所定範囲内で自由にスライド可能である。次に電気モータ11を作動させると回転基部12が回転し、これに伴いリンク機構13および錘部材14が主軸17の周囲で回転する。このとき錘部材14には回転速度の二乗に比例する遠心力が発生し、主軸17から離れる方向に移動する。これによりリンク機構13a、13bが主軸17と直角をなす方向に引っ張られ、摺動基部15が回転基部12側に移動し、ここに収縮力が発生する。
次にユニット100bに注目すると、ユニット100aにおける摺動基部15をユニット100bの回転基部として捉えることができる。ユニット100cも同様である。すなわち、モータ11が動作すると上流側の基部15が回転し、リンク機構13が回転して遠心力が発生し、下流側の基部16が上流側に引っ張られる。ユニット100cの摺動基部16は出力端18にベアリングなどの軸受け19を介して回転自在に接続されているとともに、出力端18はアクチュエータ装置のハウジング20とスプライン係合またはキー/溝構造により回転が制限されている。これにより出力端18の回転は防止され、軸方向の収縮力のみを取り出すことができる。本発明のアクチュエータ装置はユニット100を1つのみ設けた構成であってもよいが、このように複数のアクチュエータユニットを連設することにより、最下流の出力端のスライド距離を長くとることができる。この際、一部のユニットだけが伸びるなどして各ユニットの収縮が不均一になると全体の動作が損なわれかねないが、本実施例のアクチュエータ装置はバネ特性を持つため複数個のユニットを連結しても各ユニットの収縮量は均一化されるようになる。
このアクチュエータ装置の動作時に出力端18が外力により固定あるいは伸張方向に引っ張られていた場合、収縮方向への運動は妨げられるがモータ11や錘部材14は妨げられず回転し、入力電圧に応じた回転速度まで速度を上げて安定する。このとき回転速度に応じて収縮力も上昇し、この収縮力が外力を越えた時点で出力端18は収縮方向に移動を開始する。
収縮力はリンク機構の幾何学的関係から、アクチュエータの軸方向の長さに比例する。アクチュエータをが長くなるほど収縮力が大きくなる線形バネとして機能する。このバネの剛性は、回転速度の二乗に比例して大きくなる。このバネ特性によってアクチュエータ装置は複数のバネを直列接続した物と同様に、個々のユニットの収縮量がほぼ均一化され極端にばらつくことはない。
また、電気モータ11の回転速度が安定している状態で、外部から出力端18を伸張方向に引っ張ると、リンク機構13の角度が開いて錘部材14の回転半径が小さくなる。このときにも錘部材14の回転運動の接線速度はほぼ変化しないため、錘14の回転が速くなり、遠心力が増加し本来のバネ特性による収縮力とあわせて出力端18に作用する収縮力が増大する。回転速度は時間の経過とともに摩擦と電気モータ11の回転により当初の回転速度に戻るため、出力端18に作用する収縮力は本来のバネ特性による収縮力に戻る。したがって、出力端18を引っ張る外力に対してアクチュエータ装置はオイルダンパの抗力のように作用する。この抗力の特性は電気モータ11の回転速度を制御することで調整することができる。
なお、図示する実施例のアクチュエータ装置ではリンク機構と錘部材を別部材として構成しているが、このリンク機構が錘部材を兼ねてもよい。すなわち、例えば図1の実施例において別部材としての錘部材14を設けることなく、リンク機構13の材料や寸法、重量等を調整して、回転時に遠心力で外側に引っ張られ回転基部12と摺動基部15の間が狭まるようにすることができる。
図2は、本発明の第2実施例の構成を示す図である。本実施例のアクチュエータ装置では、隣接するユニット200a〜cの錘部材24を連結するリンク機構22が、隣接するユニットの反対側の錘部材を連結するレージトング式(所謂マジックハンド様の伸縮やっとこ)のリンク機構となっている。すなわち、各リンク部材22bの中央が摺動基部15に回動可能に取り付けられ、その両端部に錘部材24が設けられている。これにより、各ユニット200a〜cの錘部材24の動きが連動し、ユニット毎の収縮量が一定となり安定した動作および出力を得ることができる。なお、リンク機構以外の要素は基本的に図1に示す第1実施例とほぼ同様である。
図3は、本発明の第3実施例の構成を示す図である。本実施例のアクチュエータは、各錘部材33の両端部に屈曲可能なヒンジ部材32が設けられており、このヒンジ部材32が回転基部32と摺動基部35とを連結している。なお、図3bに断面図を示すように、断面において錘部材は2方向ではなく4方向に延在している。このようにアクチュエータ装置を構成しても、モータ回転により回転基部31が回転すると錘部材33が軸周りで回転して遠心力が働き、ヒンジ要素32が軸から離れる方向へ引っ張られ、出力端18に収縮動作を生じさせることができる。
図4は、本発明の第4実施例の構成を示す図である。本実施例のアクチュエータ装置は、個々のアクチュエータユニット300a〜cを自在継手で連結して、柔軟な配置を実現するものである。本図に示すように、個々のユニット300a〜cがほぼ独立した構成となっており、それぞれ回転を伝達する自在継手41で連結されている。電気モータ11を回転させると最も上流側のユニット300aが回転し、自在継手41が設けられた出力端すなわち摺動基部を回転させつつ収縮する。自在継手41は次のアクチュエータユニット300bを引っ張りつつ回転を伝達し、これによりユニット330bの錘部材が回転して収縮動作を行う。このようにアクチュエータ装置を構成すると、例えば人型ロボットの腕や足の曲がったところに装置を配置可能となり、省スペースを図ることができる。なお、湾曲した部分に設置するには、各ユニット300を筐体または後述するフレキシブルカバーで覆い、他の部材にユニットの回転要素が接触しないようにすることが望ましい。
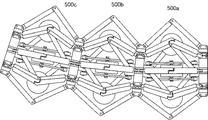
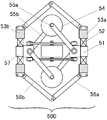
図5は、本発明の第5実施例の構成を示す図である。本実施例のアクチュエータ装置は、湾曲配置を可能にしつつ保護カバーによる強固な保護を達成するものである。図5(b)に個々のアクチュエータユニット500の部分断面図を示すように、回転基部51と摺動基部57がそれぞれ軸受け52を介して支持板53に保持されている。リンク機構55の一端はボールジョイントを介して回転基部51に取り付けられ、他端は錘部材54と回動可能に連結されている。これにより、このアクチュエータ機構全体として回転軸方向に対し湾曲可能となる。図5(c)に示すように本実施例のリンク機構55は錘部材54を十字形に配置して構成しているが、上述のようにこれは必須の構成ではない。また、本実施例で回転基部51と摺動基部57は部品としては同一であるが、前者が動力に連結され後者が出力端に連結されるという便宜上区別して参照する。
一方、支持板53同士は上記アクチュエータ機構の他、複数の外殻リンク56で連結されている。本実施例の外殻リンク56は、支持板53の円形の外周を8等分した部位同士を連結しており、各外殻リンク56はその中央に回動軸を有し外側に膨らんだくの字型に配置されている。図5(d)に支持板53と外殻リンク56のみを示す。この外殻リンク56は、機構全体の収縮を妨げず、回転軸方向に対する湾曲を可能とするとともに、アクチュエータユニットの回転要素を保護する機能を有する。この外殻リンク56の外側にゴムなどの弾性体のカバーや、高分子繊維などの網状材を被せるようにすれば、より確実に回転体を防護することができる。このように構成したアクチュエータユニット500を複数連結することにより、自在に曲がり収縮するアクチュエータ装置を構築することができる。
図6は、本発明の第6実施例の構成を示す図である。本実施例のアクチュエータ装置は、図5に示す第5実施例にヒンジ機構を適用した変形例である。図6(b)に断面図を示すように、回転基部61と摺動基部67がそれぞれ軸受け62を介して支持板63に支持されている。回転基部61と摺動基部67間には、図6(c)に示すように十字形に配設されたヒンジ機構64により錘部材65が保持されている。ヒンジ機構64はリンクとしての役割を果たしつつ捻れを許容するため、このアクチュエータユニットは回転軸方向に対して湾曲可能となる。
一方、支持板63同士は上記アクチュエータ機構の他に複数の外殻ヒンジ66で連結されている。本実施例の外殻ヒンジ66は要所で折れ曲がり可能なヒンジ部材を等間隔で配備してなり、アクチュエータユニットの回転要素が外部から妨げられないように保護するとともに、このアクチュエータ装置を湾曲可能とする役割を果たす。本例の外殻ヒンジ66は、図6(b)と(d)に詳細に示すように、回転基部61側の外殻ヒンジ66が平行リンクとして構成されており、この外殻ヒンジ66が常に平行に可動して内部の回転機構内に入らないように工夫されている。この外殻ヒンジ66の外側にゴムなどの弾性体のカバーや高分子繊維などの網材を被せるようにすれば、より確実に回転要素を保護することができる。
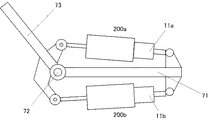
図7は、本発明のアクチュエータ装置を適用したロボット用関節の一実施例を示す図である。本図に示すように、1軸の回動軸72を有する関節の2つの回動方向にそれぞれ1つづつアクチュエータ300a、300bを設け、これらを拮抗させて関節を駆動するものである。ここで、アクチュエータ300a、300bはともに上述したアクチュエータ装置のいずれであってもよく、また、各アクチュエータ装置が有するアクチュエータユニット数も設置場所や必要なストロークを勘案して適宜決定することができる。
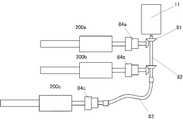
図8は、本発明のアクチュエータ装置のさらなる好適な実施例を示す図であり、1つの電気モータで複数のアクチュエータ装置を駆動しようとするものである。本図に示すように、単一の電気モータ11の動力を、歯車機構81やユニバーサル伝導ワイヤ83を用いて複数のアクチュエータ装置に分配する。各アクチュエータは速度により力を発生するため、伝達トルクの小さな電磁クラッチ等でも動力の分配が可能である。
図9は、本発明にかかるアクチュエータ装置の変形例を示す図である。本実施例のアクチュエータ装置も、電気モータの回転により錘部材を遠心力で外側へ押しやり、この離れる力を利用して収縮方向の力のみ抽出するというものである。
図9に断面図を示すように、電気モータ11に回転基部(主軸)91が接続されており、これに支柱93が固定されている。錘部材95は支柱93a、93b上をスライド可能であり、通常はバネ94により外側方向へ付勢されている。ワイヤ96の一端は主軸に固定されており、ここから滑車92を介して主軸と錘部材95を通り、最後に出力軸98に連結される。出力軸98は主軸91と勾配キー97で連結するかスプライン係合させることで、主軸91とともに回転し軸方向にスライド可能な構造とする。出力端99は出力軸98に対しボールベアリング等により回転自在に取り付けられ、収縮方向の運動のみを取り出せるようにする。
電気モータ11が停止しているときに出力端99を伸張方向に引っ張ると、ワイヤによって錘部材95が主軸91の方向に引っ張られ、機構全体が伸長する。この場合にもバネ94による収縮力が発生している。この状態で電気モータ11を回転させると、主軸91と錘部材94が一体的に回転し、錘部材95が遠心力により外側へ移動しようとするため、ワイヤ96が引っ張られて出力軸98が引き戻され、ボールベアリング等により回転が打ち消され出力端99で収縮力のみが得られる。ワイヤ96と滑車92の配置や個数を変更して、所望のストロークと収縮力発生特性を調整することができる。
図10は、本発明にかかるアクチュエータ装置のさらなる変形例を示す図である。本実施例のアクチュエータ装置は、錘部材103の移動がリンク機構ではなく、ガイドスリットが設けられたスリット板102により規定されるようにしている。スリット板102aは回転基部101に取り付けられており、これと一緒に回転する。他方のスリット板102bは摺動基部105に固定される。出力端107はベアリング等の回転軸受け106を介して摺動基部105に取り付けられており、ここで回転力を捨てて収縮力のみを取り出すよう構成されている。錘部材103はスリット板102のガイドスリットにピン104で係合している。スリット板102のスリットは、図10に示すように、回転軸に近い方が間隔が狭く、回転軸より遠ざかると間隔が広くなるよう形成されている。
電気モータ11が回転を開始すると、スリット板102およびこれに案内される錘部材103も一緒に回転し、遠心力により錘部材103が外側へ移動する。これに伴いピン104とスリットの相対関係からスリット板102同士の間隔が狭まり、出力端107が収縮方向に移動する。この構成のアクチュエータ装置では、スリット板102のスリットを例えば図10に示すのと逆の配置とすれば、回転時に出力端107を収縮方向ではなく伸張方向に移動させることができる。また、スリットの勾配や湾曲度を変更することで、その出力特性を調整することができる。
図11は、本発明にかかるアクチュエータ装置のさらなる変形例を示す図である。本実施例のアクチュエータ装置は、錘部材を回動軸に連結し、遠心力で錘部材が外側へ移動するのに伴う回動を利用してラックアンドピニオン機構により直線運動を抽出するものである。本図に示すように、電気モータ11が回転基部111(入力軸)に連結されており、その回転軸を挟んで対称的にそれぞれ回動点を有する平板118が連結されている。解同点には歯車114が取り付けられ、この歯車114からシャフト113を介して錘部材112が接続されている。これらの要素は電気モータ11により一緒に回転する。歯車114は回転軸上にスライド可能なラック軸115に歯合している。このラック軸115はベアリング等の軸受け機構を介して出力端117に接続されている。
電気モータ11が回転を始めると錘部材112も回転し、遠心力によって外周方向に広がっていく。これに伴い歯車114が回転し、ラック軸115が回転基部111側に引き込まれ、出力端117が収縮する。このときの収縮長さに対する発生力は放物線状の特性となり、筋肉の発生力特性に近いものとなる。なお、図11において錘部材112の初期位置を反対側にすると、歯車114が逆回転して伸張方向の動作を実現することもできる。
以上に詳細に説明したように、本発明のアクチュエータ機構によれば、モータの回転により錘部材を回転させ、その遠心力とリンク機構で回転基部と摺動基部の間が狭まり、結果として出力端を軸方向に引っ張る力が生じる。遠心力により得られる力は回転速度の二乗に比例するため、小型の電個モータでも簡単な機構で大きな力を得ることができる。また、例えばこのアクチュエータ装置をロボットが物を持ち上げたまま保持する動作に利用した場合、ロボット自体が停動状態でも電気モータは高速回転を維持して張力を発生し続け電気モータは停動状態とならないため、電磁コイルが焼損することなく持続的に大きな力を発生可能である。さらに、このように大きな力を持続的に発生している場合でも消費するエネルギは電気モータの回転を維持するものだけであるためエネルギの損失が少ない。また、回転速度が例えばゼロから上昇に伴いその二乗に比例して発生力が上昇するため、アクチュエータ装置のみならずこれを適用するさまざまな機構各部に対して力が急激に作用することがない。したがって、本質的に動作が柔らかくなり、装置やシステムの耐久性も向上する。さらに、モータの停止時には外力で容易に動かすことができ、例えば人型ロボットにおける力を抜いた状態を再現することができる。また、動力発生中であっても発生力を越える外力を受けた場合にはモータの回転(遠心力)を維持しつつ外力に従順すなわち牽引方向と逆方向に動作させることができるとともに、この場合にもモータが停動または逆回転することがないため機構が損壊することがない。したがって、特に人間型ロボットに求められる動作に適したアクチュエータを得ることができる。
なお、本発明は上記実施例の形態に限定されるものではなく、当業者であれば本明細書の記載から様々な変形例、変更例を考えることができる。本発明の範囲はこのような変形例、変更例を包含すると理解されるべきであり、その外延は添付の特許請求の範囲によってのみ解釈されたい。
本発明にかかるアクチュエータ装置は、軸方向の収縮あるいは伸張が必要な様々な動力機構に適用することができる。例えば、本発明のもつ電気的にバネ特性を変更することが可能な特徴を活かし、車両の状況や走行面の変化に対応してサスペンションの特性を変化させて車両を安定な状態に保つことが必要な自動車や電車のサスペンションや、多様な振動を速やかに吸収する免震装置に利用することができる。
また、大きな力を発生しても消費電力が少なく、発生力が速度の二乗に比例するため比較的小型の電気モータでも連続的に大きな発生力を得られることから、小型・小電力で大きな力が必要なブレーキ装置や、連続的に大きな力を必要とするクランプ装置の動力として好適に利用可能である。
また、外力に対して力を逃がすことができるため、自動ドアの動力装置として利用すると、ドアが何か挟んでしまった場合にも過度な力をかけて締めるのが防止され、安全性を向上させることができる。
さらに、本発明のアクチュエータ装置を利用したロボット装置は、機械製造業やロボット産業で好適に利用することができる。
本発明にかかるアクチュエータ装置の第1実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第2実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第3実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第4実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第5実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第6実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第7実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第8実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第9実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第10実施例の構成を示す図である。
本発明にかかるアクチュエータ装置の第11実施例の構成を示す図である。
11 電気モータ
12 回転基部
13 リンク機構
14 錘部材
15 摺動基部
18 出力端
100、200、300 アクチュエータユニット
56 外殻リンク
84 クラッチ
94 スプリング
96 ワイヤ
102 スリット板
104 ピン
114 歯車
115 ラック軸